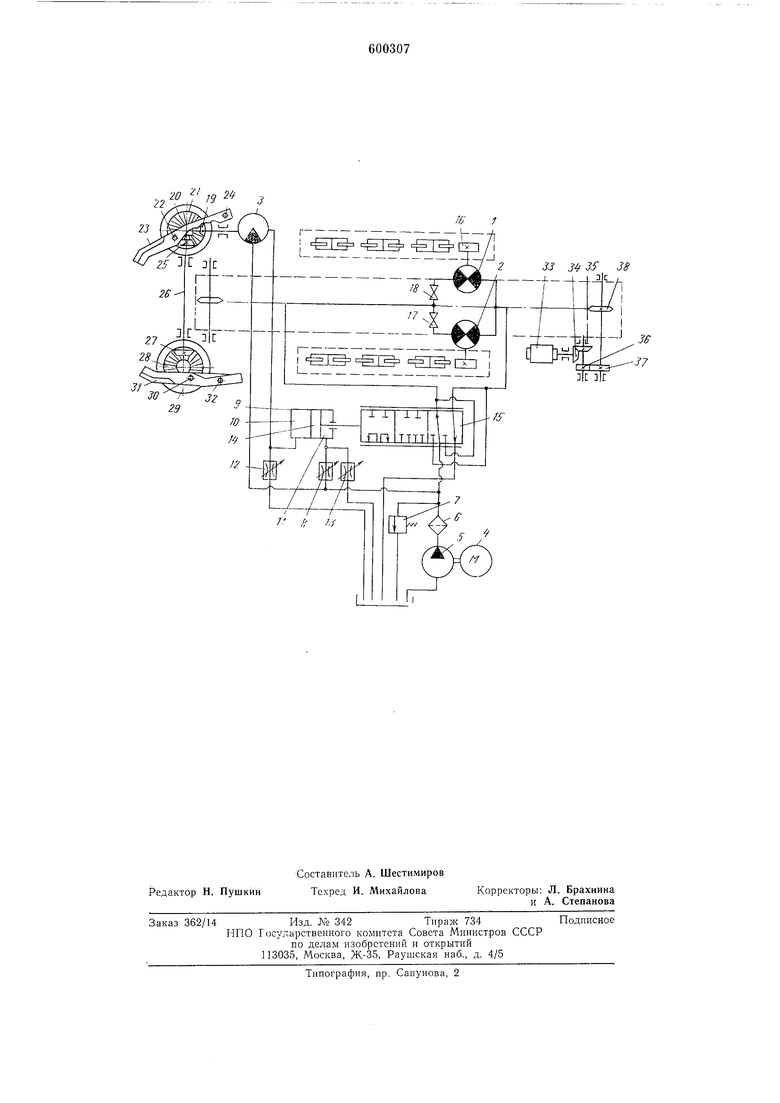
Цель изобретения -- обеспечение еаморегулирования екорости подачи в зависимоети от нагрузки на иеиолиительном органе. Это достигается тем, что в напорную линию насоса включены параллельно между собой регулируемый дроссель и гидромотор привода иснолнительного органа, а на его сливной линии перед дросселем включен управляющий элемент, выполнеппый в виде дифференциального гидроцилиндра и раснределителя, связанных между собой штоком дифференциального гидроцилиндра, при этом штоковая полость дифференциального гидроцилиндра соединена с напорной магистралью насоса и со сливом посредством регулируемых дросселей. На чертеже представлена принципиальная гидрокинематическая схема погрузочной машины. Привод погрузочной машины состоит из маслоетанции и трех гидромоторов постоянной производительности, два из которых 1 и 2 - реверсируемые соединены параллельно и представляют привод ходового механизма, гидромотор 3, приводящий в движение исполнительный орган, соединен параллельно гидросистеме, питающей гидромоторы 1 и 2. Маслостанция включает в себя электродвигатель 4, насос 5, фильтр 6, предохранительный клапан 7. Параллельно цепи гидромотора 3 в гидросистему включен регулятор 8 режимов, причем гидросопротивление его во время установившегося режима работы машины больше гидросопротивления гидромотора 3 на величину, необходимую и достаточную для создания на исполнительном органе определенного момента сопротивления при заданном режиме. Между сливными линиями гидромотора 3 и регулятора 8 режимов включен дифференциальный гидроцилиндр 9, причем одна из его полостей 10 соединена с линией гидромотора 3, а другая полость 11 -с линией регулятора 8 режимов. После дифференциального цилиндра 9 в сливные линии гидромотора 3 и регулятора 8 режимов включены дроссели 12 и 13, регулируемые на расчетные расходы в зависимости от заданного режима, например скорости подачи. Поршень 14 связан с распределителем 15, регулирующим расход и направление рабочего потока жидкости к гидромоторам 1 и 2 ходового механизма. Валы гидромоторов I и 2 непосредственно передают крутящие моменты приводным звездочкам 16 ходового механизма. Краны 17 и 18 служат для выполнения разворота машины при маневровых операциях. От вала гидромотора 3 осуществляется передача крутящего момента исполнительному органу через конические шестерни 19 и 20, кривошипный диск 21 с эксцентрично расположенным на нем пальцем 22 на правую нагребающую лапу 23 с кулисой. Паз кулисы направляется роликом 24. Через пару конических шестерен 20, 25 крутящий момент пе)едается валу 26 и далее коническим шестерням 27 и 28, кривошипному диску 29 с пальцем 30, правой нагребающей лапе 31 с кулисой. Паз кулисы направляется роликом 32. Передача крутящего момента погрузочному конвейеру осунгествляется от электродвигателя 33 через пару конических колес 34 и 35, нару цилиндрических колес 36 и 37 на ведущую звездочку 38 конвейера. Машина работает следующим образом. При включении в работу гидронасоса постоянной производительности к напорным линиям регулятора 8 режимов и гидромотору 3 подается рабочая жидкость (масло). В зависимости от необходимого режима погрузки материала, например необходимой глубины черпания, гидросопротивление регулятора 8 режимов устанавливается большим, чем гидросопротивление гидромотора 3 на величину, необходимую и достаточную для создания на исполнительном органе (нагребающих лапах 23 и 31) соответствуюнгего момента сопротивления черпанию. Так как контакт исполнительного органа с погружаемым материалом отсутствует в начальный момент работы машины, а значит отсутствует и момент сопротивления на исполнительном органе, то, следовательно, сопротивление гидромотора 3 будет меньше гидросопротивления регулятора 8 режимов. Это приведет к тому, что расход масла через гидромотор 3 будет много больше расхода .масла через регулятор 8 и больше расхода через дроссель 12, соответствуюшего определенному расходу через дроссель 13. Следовательно, часть масла, равная разности действительного расхода его через гидромотор 3 и возможного для определенного режима через дроссель 12, ностунит в полость 10 гидроцилиндра 9, создав там определенное давление, которое по величине будет больше давления в полости И. Разность давлений будет соответствовать определенному усилию, действующему на дно цилиндра со стороны полости 10, и переместит поршень 14, а также связанный с ним (как на чертеже или через передаточный механизм) распределитель 15 в правое положение (как на чертеже). Вследствие этого часть рабочего потока жидкости поступит к гидромоторам 1 и 2 и ходовой механизм осушествит подачу машины на штабель погружаемого материала. По мере внедрения нагребающих лап 23 и 31 в штабель погружаемого материала ими воспринимается все более увеличивающийся момент сопротивления внедрению. При достижении моментом сопротивления величины, отвечающей заданной глубине черпания, при которой гидросопротивление гидромотора 3 будет соответствовать установленному для данного режима гидросопротивлению регулятора 8 режимов, для гидроцилиндра 9 наступит период динамического равновесия. Этот период характеризуется тем, что с одной стороны на гидроцилиндр 9 вдоль его оси будет действовать усилие, создаваемое давлением в полости 10, а с другой стороны это усилие будет уравновешиваться усилием, создаваемым в полости 11. Следовательно, период динамического равновесия будет соответствовать определенному режиму работы, например определенной глубины черпая. При нарушении динамического равновесия, например из-за возрастания момента сопротивления на исполнительном органе вследствие увеличения глубины черпания, результирующее усилие, действующее в гидроцилиндре 9, будет приложено к поршню 14 со стороны полости 11 и переместит последний и связанный с ним распределитель 15 на некоторую величину влево от его первоначального положения. Такое изменение положения распределителя 15 уменьшит поток рабочей жидкости к гидромоторам 1 и 2 ходового механизма и соответственно скорость подачи машины на забой. При этом скорость подачи будет снижаться до тех лор, пока для гидроцилиндра опять не наступит динамическое равновесие. При значительном возрастании момента сопротивления на исполнительном органе поршень 14 и распределитель 15 перемещаются результирующим усилием, действующим со стороны полости 11, в крайнее левое (как на чертеже) положение, а скорость подачи снижается до нуля, затем машина отходит назад до тех пор, пока момент сопротивления на исполнительном органе не уменьшится до расчетного. Для описываемой погрузочной машины характерно быстродействие системы управления, так как замена механических передач элементами гидропривода позволяет снизить инерционность этих звеньев и всей системы управления в целом. Применение описываемой схемы позволит упростить конструкцию всей машины, применить безредукторную систему привода .ходового .механизма (мотор-колесо), выполнить компановку машины исходя только из удобства расположения и функционального назначения исполнительных органов самой машины, снизить сум.марную установленную мощность гидромотора, повысить надежность машины в целом и отдельных ее элементов, повысить быстродействие всей системы. Формула изобретения Погрузочная машина, включающая исполнительный орган непрерывного действия, погрузочный конвейер, ходовую часть, управляющий элемент, регулируемые дроссели, гидромоторы привода ходовой части, соединенные с насосом параллельно, гидромотор привода исполнительного органа, в сливной магистрали которого установлен регулируемый дроссель, отличающаяся тем, что, с целью обеспечения саморегулирования скорости подачи в зависимости от нагрузки на исполнительном органе, в напорную линию насоса включены параллельно между собой регулируемый дроссель и гидромотор привода исполнительного органа, а на его сливной линии перед дросселем включен управляющий элемент, выполненный в виде дифференциального гидроцнлиндра н распределителя, связанных между собой штоком дифференциального гидроцнлиндра, цри этом штоковая полость дифференциальцого гидроцилиндра соединена с напорной магистралью насоса и со сливом посредством регулируемых дросселей. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР №420793, кл. Е 21F 13/00, 1972. 2. Авторское свидетельство СССР Л 404948, кл. Е 21F 13/00, 1971. 2. 2J ( / /A 
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОГРУЗОЧНАЯ МАШИНА | 1995 |
|
RU2097569C1 |
| Погрузочная машина | 1983 |
|
SU1157267A1 |
| Гидропривод погрузочной машины | 1984 |
|
SU1221389A1 |
| Гидравлическая система управления погрузочной машиной | 1978 |
|
SU673740A1 |
| Бурильная машина | 1984 |
|
SU1232795A1 |
| Погрузочная машина непрерывного действия с боковым захватом | 1976 |
|
SU605990A1 |
| Гидропривод бурового станка | 1987 |
|
SU1460235A1 |
| Гидросистема промышленного робота | 1986 |
|
SU1318392A1 |
| СИЛОВОЙ ГИДРАВЛИЧЕСКИЙ БЛОК ПИТАНИЯ МОБИЛЬНОЙ МАШИНЫ | 2004 |
|
RU2277188C2 |
| Погрузочная машина | 1983 |
|
SU1086188A1 |