Изобретение относится к технической кибернетике и предназначено для идентификации линейных детерминированных динамических объектов. Способ может быть применен для определения математической модели объекта на основе дискретной информации о сигналах на его входе и выходе и реализован с использованием ЭВМ.
Известен способ идентификации линейного динамического объекта (Дейч А.М. Методы идентификации динамических объектов, М. Энергия, 1979, с.160), в котором задают пробную модель объекта в виде разностного уравнения:
где Yk величина сигнала на выходе объекта в k-том такте;
Xk величина сигнала на входе объекта в k-том такте;
Ai, Bj параметры математической модели объекта.
Идентификация объекта заключается в том, что по результатам измерений Xk, Yk оценивают известные параметры Ai, Bj путем составления системы линейных алгебраических уравнений, записав выражение (1) для k 0, 1, 2, 2n. Далее решают эту систему уравнений относительно параметров Ai, Bj.
Способ имеет следующие недостатки:
для построения адекватной модели необходимо правильно задать порядок исследуемого объекта, в противном случае не достигается точность идентификации;
при замене порядка n необходимо изменять структуру и заново решать систему линейных алгебраических уравнений, что снижает быстродействие из-за значительного числа вычислительных операций (если объект n-го порядка, то система состоит из (2n +1) уравнений);
решение системы алгебраических уравнений может быть не определено из-за недостаточной обусловленности основной матрицы системы.
Наиболее близким к предлагаемому способу является способ идентификации линейного динамического объекта (авт. св. N 361456, кл. G 05 B 17/02, заявл. 08.11.69, БИ N1, 1973), сущность которого состоит в следующем: измеряют значения входного и выходного сигналов объекта, подают их на пробную модель, которую задают в виде разностного уравнения (1). Определяют вектор параметров объекта  (A0, A1, Am, B1, B2, Bn) и вектор состояния
(A0, A1, Am, B1, B2, Bn) и вектор состояния  (Xk, Xk-1, Xk-m, Yk-1, Yk-2, Yk-n), тогда (1) записывают в виде скалярного произведения:
(Xk, Xk-1, Xk-m, Yk-1, Yk-2, Yk-n), тогда (1) записывают в виде скалярного произведения: 
Идентификацию осуществляют по итерационной формуле:
где  вектор параметров модели объекта, получаемой в результате идентификации;
вектор параметров модели объекта, получаемой в результате идентификации;
α1 и α2 настроечные параметры, подбираемые экспериментально.
Определяют разность сигналов с выходов объекта и модели, суммируют ее с сигналом, пропорциональным интегралу разности сигналов, и полученным сигналом управляют параметрами пробной модели.
Этот способ имеет следующие недостатки:
необходимо правильно задать порядок исследуемого объекта, в противном случае занижается точность идентификации;
способ не дает рекомендаций выбора начальных значений настроечных параметров α1 и α2 а также алгоритма изменения их при изменении структуры идентификации, что значительно снижает быстродействие процесса идентификации.
Предлагаемым изобретением ставится задача структурно-параметрической идентификации линейного объекта, позволяющая автоматически определить структуру и известные параметры математической модели объекта, исключая процесс корректировки подстраиваемых параметров модели, значительно упрощая и ускоряя процесс идентификации.
Задача решается новым способом идентификации линейного объекта путем определения значений входного и выходного сигналов объекта, подачи их на пробную модель, определения разности сигналов с выходов объекта и пробной модели, причем точность идентификации задают заранее, в качестве модели формируют последовательное множество пробных моделей возрастающего порядка, последовательно выделяют первую пробную модель, сравнивают значения сигналов на выходах объекта и выбранной пробной модели и полученным сигналом рассогласования управляют выбором порядка следующей модели до достижения заданной точности идентификации.
В известных способах построения математических моделей путем дробно-рациональных аппроксимаций неочевидно определение параметров полиномов в числителе и знаменателе, процедура их оценки является достаточно трудоемкой. В предлагаемом способе впервые для аппроксимации дискретной передаточной функции (ДПФ) объекта идентификации использован аппарат непрерывных дробей, порождающих множество пробных моделей объекта, что позволяет автоматически определять структуру и неизвестные параметры модели по заранее заданной точности идентификации.
Изобретение поясняется на фиг. 1 5.
Структурная схема системы, реализующей предлагаемый способ, изображена на чертеже (фиг.1).
Входной сигнал Xk поступает одновременно на вход блока 1 объекта идентификации и на вход блока 2 формирования множества пробных моделей, на блок 2 также поступает выходной сигнал объекта Yk. Блок 2 определяет ДПФ G(z) идентифицируемого объекта, разлагает ее в непрерывную дробь, получает множество пробных моделей в виде конечных непрерывных дробей, выделяет первую пробную модель. Далее в блоке 3 восстановления значений выходного сигнала объекта определяют модельный выходной сигнал Y
Предлагаемый способ осуществляется следующим образом: по результатам измерений входных и выходных сигналов объекта в равноотстоящие промежутки времени строят ДПФ как отношение вход-выходных Z-преобразований по формуле:
G(z) Y(z)/X(z),
где Y(z) Z-преобразование выходного сигнала;
X(z) Z-преобразование входного сигнала.
Из формулы (2) следует, что полученная ДПФ представляет собой соотношение двух бесконечных полиномов степени z-1. Для получения ДПФ идентифицируемого объекта в виде дробно-рационального выражения и определения ее параметров, используют аппарат дробно-рациональных аппроксимаций. Разлагают G(z) в непрерывную дробь вида:
где ai, bj параметры разложения бесконечной непрерывной дроби, определяющиеся по результатам измеренных значений выходных и входных сигналов объекта.
Аппроксимируют G(z) последовательностью {Gk(z)}
Если максимальная разница между экспериментальными Yk и модельными Y для всех k (3),
для всех k (3),
то уравнение (1) задается искомой математической моделью идентифицируемого объекта порядка, равного порядку соответствующей конечной непрерывной дроби. В противном случае получают новую аппроксимацию ДПФ G(z), взяв конечную непрерывную дробь на порядок выше, находят соответствующее ей разностное уравнение и проверяют выполнение критерия (3).
Конечная непрерывная дробь наибольшего порядка, проходящая через все наблюдаемые значения выходной величины, является точной моделью идентифицируемого объекта с ε 0.
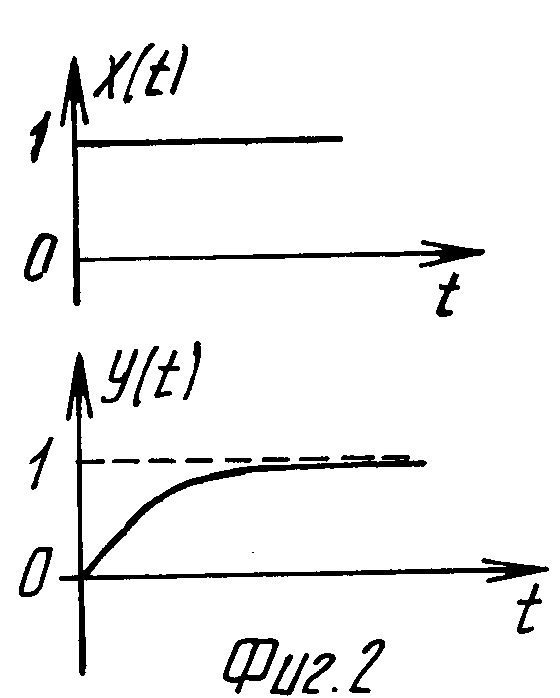
Пример 1. Аналоговый объект идентификации нагревательная печь. Известно, что данный объект описывается апериодическим звеном 1-го порядка, входная величина которого количество поступающего в единицу времени тепла, а выходная величина температура в печи to. Передаточная функция звена G(s) K/(T s + 1), где K коэффициент передачи; T- постоянная времени.
На входе объекта имеют сигнал  где t время.
где t время.
На выходе получают сигнал (фиг.2) y(t) K(1-e-t/T), y0=0.
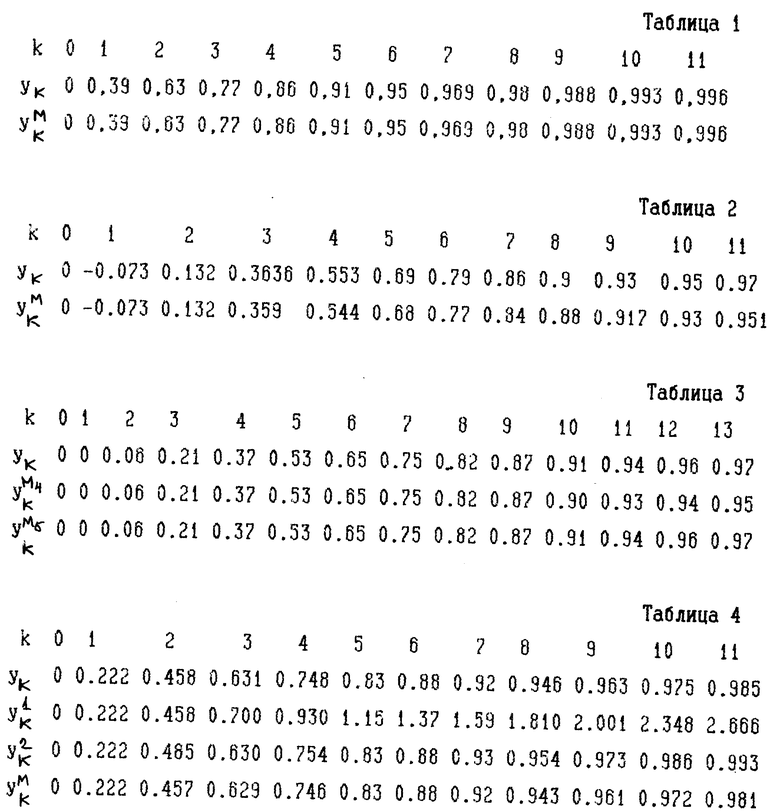
Пусть K 1, T 2, тогда для шага дискретизации Δt1 имеют дискретные измеренные значения выходной величины yk (табл. 1).
Задают требуемую точность идентификации ε= 0,01.
По данным измерений полагают y11 y12= 1.
Находят ДПФ по формуле (2):
Приводят подобные при одинаковых степенях переменной z и вводят следующие обозначения: C0 y0, Ck yk yk-1 для k 1, 2, 11.
Тогда ДПФ переписывают в виде:
здесь C0 0, C1 0,39; C2 0,238; C3 0,144 и т.д.
Разлагают G(z) в непрерывную дробь следующим образом: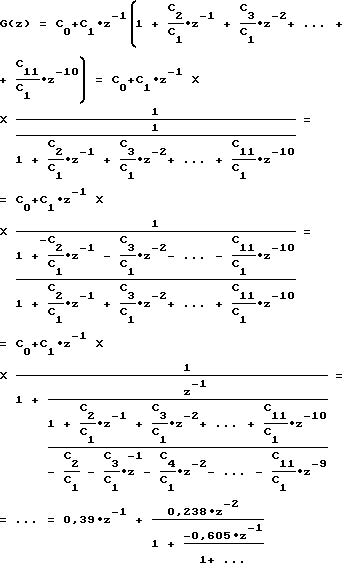
Берут непрерывную дробь 2-го порядка: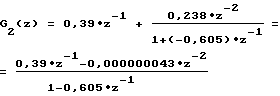
По найденной ДПФ G2(z) выписывают разностное уравнение для Y
Y
где Y
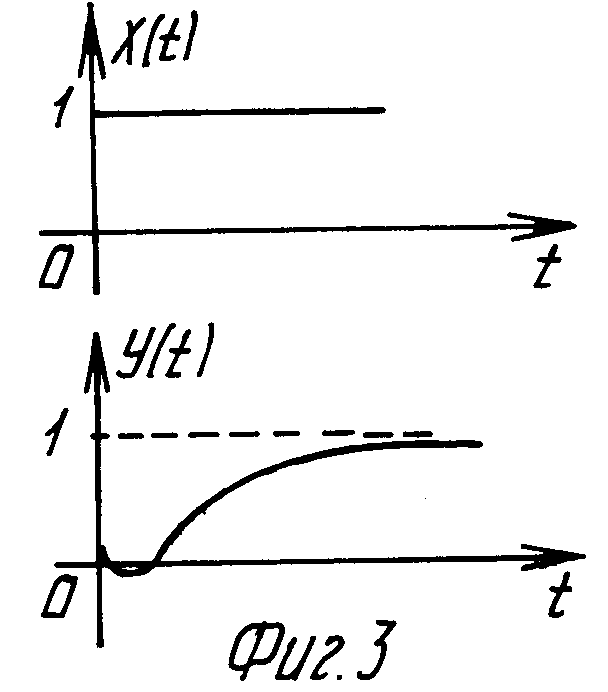
Пример 2. Объект идентификации одновальной топливно-реактивный двигатель с регулируемым соплом. Известно, что процесс расхода топлива описывается точной функцией: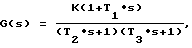 ,
,
где T1, T2, T3 постоянные времени;
K коэффициент передачи.
Пусть с течением времени произошли изменения в канале подачи топлива таким образом, что процесс расхода топлива приобрел свойства неминимально-фазовости (переходная характеристика процесса на фиг.3). Передаточная функция объектов с неминимально-фазовой характеристикой имеет следующий вид: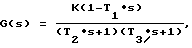 ,
,
где K коэффициент передачи;
T1, T2, T3 постоянные времени.
Соответствующая дискретная передаточная функция:
Задают требуемую точность идентификации ε 0,02. Для шага дискретизации Dt 4, K 1, T1 4, T2 10, T3 4 имеют следующие параметры G(z):
a1 -1,0382; a2 0,2466; b1 -0,073; b2 0,282.
По ДПФ G(z) находят дискретную теоретическую модель объекта (табл.2) по формуле:
Yk -0,073xk-1 + 0,282xk-2 + 1,038Yk-1- 0,246Yk-2
Находят Z-преобразования входной и выходной величин: X(z) 1/(1-z-1); Y(z) y0+y 1 •z-1 ++ y11•z-11+.
По данным измерений выходной величины полагают y11 y12= 1, тогда:
Y(z)= y0 + y1•z-1+ +y11•z-11[1 + z-1 + z-2+. y0 + y1•z-1+.+y11•z -11/(1
z-1).
Далее находят ДПФ по формуле (2) и, приведя подобные при одинаковых степенях переменной z, получают: ,
,
где C0 y0, Ck y0, Ck yk - yk-1 для k 1, 2,11.
Разлагая G(z) в непрерывную дробь и ограничиваясь непрерывной дробью 4-го порядка, получают: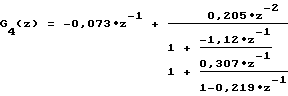
Свернув эту непрерывную дробь, переходят к разностному уравнению: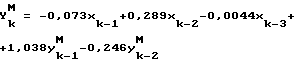
Здесь Y
Параметры полученной модели в виде ДПФ совпадают с параметрами заданной ДПФ тестового объекта.
Результаты вычислений приведены в сравнительной табл. 2.
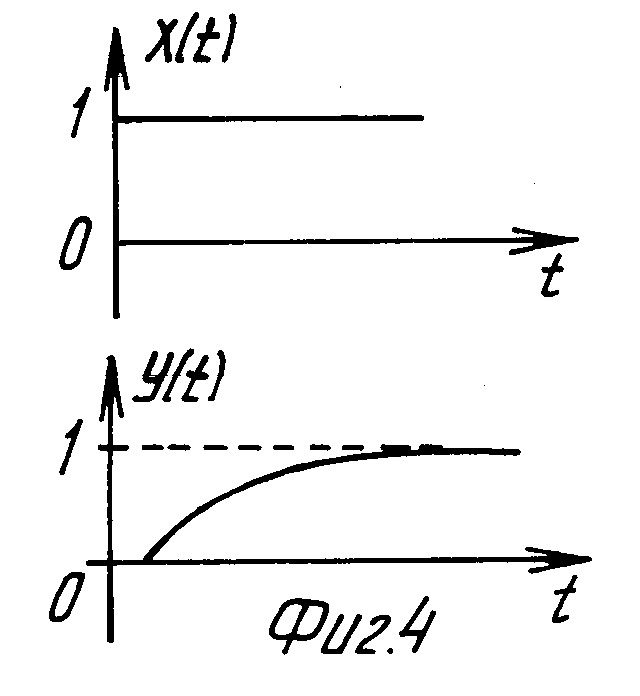
Пример 3. Сложный тестовый объект, обладающий транспортным запаздыванием, описывающийся непрерывной передаточной функцией вида:
где K 1 коэффициент передачи; T1 10, T2 7, T3 3, T4 2, Tt 4 постоянные величины. В частном случае при T3 T4 формула (5) является передаточной функцией сушильной башни для производства серной кислоты. Переходная характеристика тестого объекта изображена на фиг. 4.
Соответствующая объекту (5) ДПФ для шага дискретизации Δt 4:
Тогда теоретическая модель тестого объекта имеет вид:
Yk 0,0652xk-2 + 0,0479xk-3 0,0075xk-4 + 1,4986yk-1 0,7041yk-2 + 0,0998yk-3
Дискретные измерения выходной величины y при k 1,2,13 приведены в табл. 3.
Аналогично примерам 1, 2 находят разложение ДПФ в непрерывную дробь: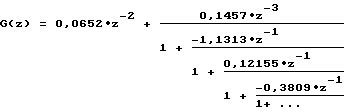
Разностное уравнение, соответствующее непрерывной дроби 4-го порядка: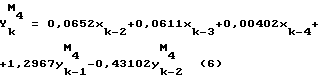
Разностное уравнение, соответствующее непрерывной дроби 5-го порядка: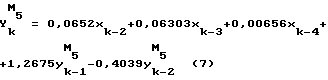
Значения выходной величины, восстановленные по уравнениям (6) и (7), приведены в табл. 3 (для точности идентификации ε 0,02).
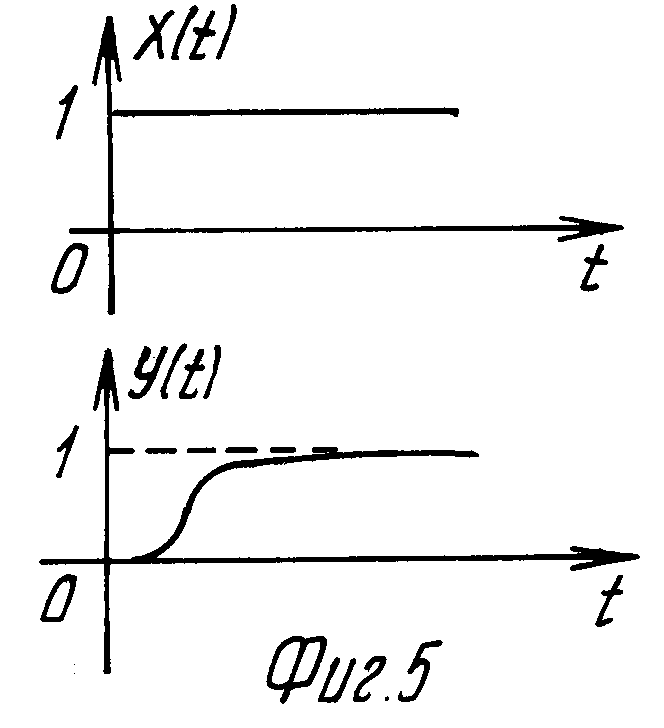
Пример 4. Сравнительный анализ предлагаемого способа с аналогом. Пусть объект идентификации поплавковый уравномер, входная величина которого - перемещение поплавка, выходная величина изменение уровня жидкости в резервуаре. Этот объект описывается апериодическим звеном 2-го порядка с непрерывной передаточной функцией: G(s) K/(1 + T1•s + T2•s2), где K коэффициент передачи, T1, T2 - постоянные времени. Возьмем для определенности K 1, T1 3, T2 1, т.е. уравнение выходной величины yk 1 1.17e-k/2 + 0.17e-k/0,38.
Экспериментатор по виду переходной кривой (фиг. 5) задает порядок пробной модели. Пусть пробная модель 1-го порядка, тогда для нахождения оценок неизвестных параметров модели (1) составляют систему линейных алгебраических уравнений для k 0, 1, 2. Решив ее, получают следующие оценки параметров: A0 0, A1 0,222, B1 -1,063, тогда модельные значения выходной величины восстанавливаются разностным уравнением Y
Из табл. 4 видно, что пробная модель 1-го порядка плохо описывает объект по сравнению с предлагаемым способом идентификации. Взяв пробную модель не 1-го, а 2-го порядка, по способу аналогу оценивают неизвестные параметры модели, решив систему из 5-ти линейных уравнений следующим образом: A0 0, A1 0,222, A2 0,168, B1 -0,438, B2 -1,178. Тогда значения выходной величины пробной модели 2-го порядка восстанавливаются разностным уравнением:
Предлагаемый способ идентификации уже по разностному уравнению:
Y
соответствующему конечной непрерывной дроби 3-го порядка, описывает объект с точностью ε 0,01 и не требует решения системы алгебраических уравнений.
Этот пример иллюстрирует следующий факт: простые объекты достаточно хорошо идентифицируются по способу-аналогу, визуально определяя по переходной кривой порядок модели. В случае с неминимально-фазовыми объектами эта процедура затруднительна.
Таким образом, точность идентификации объекта зависит от порядка полученной дробно-рациональной передаточной функции, т.е. от порядка модели исследуемого объекта. Предлагаемый способ идентификации отличается от традиционных способов тем, что используют последовательное множество пробных моделей в виде конечных непрерывных дробей, позволяющих, не задавая порядок дробно-рационального выражения ДПФ, алгоритмически находить параметры ДПФ и ее порядок по заранее заданной точности идентификации. Предлагаемый способ предусматривает простоту, точность и быстроту перехода от полученных параметров к любым параметрам других эквивалентных математических моделей. Он позволяет идентифицировать объекты с неминимально-фазовой характеристикой, описание которых является затруднительной задачей, а также значительно увеличивает быстродействие процесса идентификации за счет исключения большого объема вычислительных операций.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 1999 |
|
RU2146063C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 2001 |
|
RU2189622C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 2001 |
|
RU2189621C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 2002 |
|
RU2233480C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕАРИЗОВАННОГО ДИНАМИЧЕСКОГО ОБЪЕКТА | 2003 |
|
RU2256950C2 |
| СПОСОБ АНАЛИЗА МНОГОЧАСТОТНЫХ СИГНАЛОВ, СОДЕРЖАЩИХ СКРЫТЫЕ ПЕРИОДИЧНОСТИ | 2009 |
|
RU2399060C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ И ЗАДАТЧИК ПРОБНЫХ СИГНАЛОВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2131139C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ МУЛЬТИСИНУСОИДАЛЬНЫХ ЦИФРОВЫХ СИГНАЛОВ | 2018 |
|
RU2703933C1 |
| СПОСОБ УПРАВЛЕНИЯ НЕЛИНЕЙНОЙ ДИНАМИКОЙ ПРЕОБРАЗОВАТЕЛЕЙ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2013 |
|
RU2549172C2 |
| Способ идентификации мультисинусоидальных цифровых сигналов | 2022 |
|
RU2787309C1 |
Изобретение относится к технической кибернетике и предназначено для идентификации линейных детерминированных динамических объектов. Технический результат заключается в повышении точности и быстродействия процесса идентификации линейного объекта, который достигается путем определения значений входного и выходного сигналов объекта, подачи их на пробную модель, которую формируют из последовательного множества пробных моделей возрастающего порядка, выделения первой пробной модели, сравнения сигналов на выходах объекта и выбранной пробной модели и управления выбором порядка следующей модели полученным сигналом рассогласования достижения заранее заданной точности идентификации. 5 ил., 4 табл.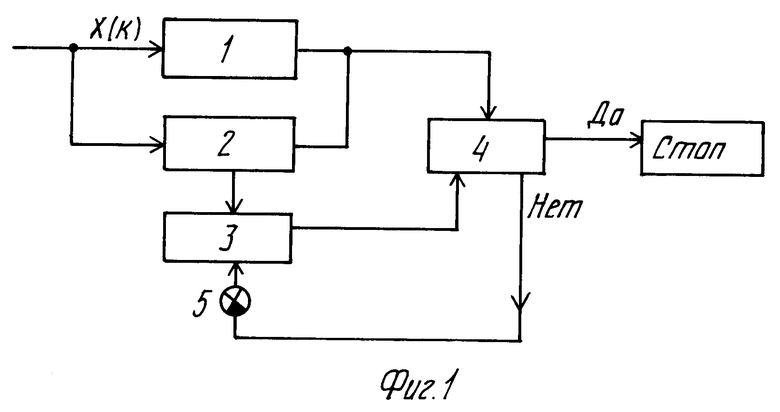
Способ идентификации линейного объекта путем определения значений входного и выходного сигналов объекта, подачи их на пробную модель, определения разности сигналов с выходов объекта и пробной модели, отличающийся тем, что точность идентификации задают заранее, в качестве модели формируют последовательное множество пробных моделей возрастающего порядка, последовательно выделяют первую пробную модель, сравнивают значения сигналов на выходах объекта и выбранной пробной модели и полученным сигналом рассогласования управляют выбором порядка следующей модели до достижения заданной точности идентификации.
| SU, авторское свидетельство, 361456, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
