Изобретение относится к технической кибернетике и предназначено для идентификации линейных динамических объектов с переменным запаздыванием. Способ может быть применен для определения (аппроксимации) времени переменного запаздывания на основе информации о сигналах объекта на входе и выходе и реализован с использованием ЭВМ в автоматическом режиме, в реальном масштабе времени.
Известна система идентификации параметров нестационарного объекта с переменным запаздыванием (патент РФ 2027214, МПК G 05 В 23/00, опубликованный 20.01.95).
Изобретение относится к системам идентификации переменных параметров динамических объектов, в том числе и переменного запаздывания, зависящего от времени. Способ определения переменного запаздывания основан на подстройке параметров системы по сигналу  означающему наличие отклонений параметров объекта и модели. При
означающему наличие отклонений параметров объекта и модели. При  параметры объекта и модели равны. Лежащее в основе изобретения представление x(t-τ) в ряд Тейлора в точке t обладает очень низкой точностью и существенно зависит от числа членов разложения, к тому же автор ограничивается двумя членами разложения. Следует отметить, ведение дифференциаторов еще более усугубляет положение, так как вносит в систему импульсные воздействия, что вряд ли может гарантировать высокое качество идентификации.
параметры объекта и модели равны. Лежащее в основе изобретения представление x(t-τ) в ряд Тейлора в точке t обладает очень низкой точностью и существенно зависит от числа членов разложения, к тому же автор ограничивается двумя членами разложения. Следует отметить, ведение дифференциаторов еще более усугубляет положение, так как вносит в систему импульсные воздействия, что вряд ли может гарантировать высокое качество идентификации.
Наиболее близким к предлагаемому способу является способ идентификации линейного объекта (патент РФ 2146063, МПК G 05 В 17/02, опубликованный 27.02.2000) путем определения входного и выходного сигналов объекта, подачи их на идентификатор непрерывной дроби с последующим восстановлением дискретной математической модели объекта.
Способ заключается в следующем: по дискретным измерениям вход-выходных сигналов в равноотстоящие моменты времени с шагом дискретизации Δt строят дискретную передаточную функцию (ДПФ) как отношение Z-преобразования выходного сигнала к Z-преобразованию входного сигнала. Для получения ДПФ идентифицируемого объекта пользуются представлением в виде соответствующей правильной С-дроби, применив модифицированный алгоритм В.Висковатова, для которого строится идентифицирующая матрица. Если в (0)-строке матрицы конечное число k первых элементов равны нулю, а последующие отличны от нуля, то необходимо осуществить сдвиг влево на k элементов, при этом восстановленная ДПФ умножается на z-k.
Таким образом, для повышения точности определения параметров объекта необходимо уменьшать шаг дискретизации, однако многократное уменьшение величины шага приводит к подмене (искажению) структуры прогнозирующей модели объекта. То есть данный способ не позволяет повысить точность идентификации без искажения прогнозирующей модели объекта.
Предлагаемым изобретением ставится задача структурно-параметрической идентификации линейного объекта, позволяющей автоматически определять структуру и неизвестные параметры математической модели объекта, исключая многократное изменение шага дискретизации, значительно упрощая и ускоряя процесс идентификации, что дает возможность использовать данный метод для текущей идентификации в реальном масштабе времени, и повышать точность и достоверность результатов моделирования объекта управления.
Поставленная задача решается новым способом идентификации линейного объекта путем определения значений входного и выходного сигналов объекта, подачи их на идентификатор непрерывной дроби с последующим восстановлением дискретной математической модели объекта, причем для фиксированного входного сигнала по параметрам дискретной математической модели объекта восстанавливают непрерывную математическую модель реакции объекта, в которой определяют дискретные модельные значения выходного сигнала объекта, из множества дискретных модельных значений выходного сигнала определяют момент времени, при котором значение данного сигнала отлично от нуля, при этом шаг задают меньше наперед заданной точности и путем обратного табулирования от момента времени, при котором дискретное модельное значение выходного сигнала отлично от нуля, определяют величину транспортного запаздывания объекта, значение этой величины запасают в блоке хранения, затем изменяют амплитуду входного сигнала и повторяют весь процесс до определения величины транспортного запаздывания объекта, при этом накопленные значения величин транспортного запаздывания используют для идентификации переменного запаздывания объекта путем аппроксимирования времени переменного запаздывания дробями Тиле.
Реализация способа поясняется структурной схемой, которая содержит:
блок 1 изменения амплитуды входного сигнала;
блок 2 объекта идентификации;
блок 3 идентификатора непрерывной дроби;
блок 4 восстановления дискретной математической модели;
блок 5 перехода к непрерывной математической модели;
блок 6 оценки временного запаздывания;
блок 7 накопления оценок временного запаздывания;
блок 8 идентификации временного запаздывания.
Фиксированный входной сигнал x(k) из блока 1 поступает на вход блока 2 объекта идентификации и на вход блока 3 идентификатора непрерывной дроби. На блок 3 поступает также выходной сигнал y(k). Блок 3 преобразовывает значения входного и выходного сигналов объекта в идентифицирующую матрицу и формирует непрерывную дробь. Затем коэффициенты непрерывной дроби поступают на вход блока 4 восстановления дискретной математической модели объекта. Далее параметры полученной модели поступают на блок 5 перехода к непрерывной математической модели реакции объекта, в котором определяют модельные значения выходного сигнала объекта идентификации. Затем в блоке 6 из множества дискретных значений, выходного сигнала y(k) определяют время tk, при котором данный сигнал отличен от нуля. Задают шаг дискретизации Δ меньше наперед заданной точности и путем обратного табулирования от момента времени tk определяют величину временного запаздывания объекта. Далее величина временного запаздывания поступает в блок 7 накопления оценок транспортного запаздывания. Потом изменяют величину амплитуды входного сигнала и повторяют процесс определения величины временного запаздывания. Накопленные значения в блоке 7 поступают на вход блока 8 идентификации переменного запаздывания объекта, в котором его определяют с помощью аппроксимации дробями Тиле с требуемой погрешностью вычислений.
Предлагаемый способ осуществляется следующим образом.
По результатам измерений входных и выходных сигналов объекта в равноотстоящие промежутки времени с шагом дискретизации Δt строят дискретную передаточную функцию объекта как соотношение Z-преобразований по формуле
где Y(z) Z - преобразование выходного сигнала;
X(z) Z - преобразование входного сигнала.
Для получения ДПФ идентифицируемого объекта пользуются представлением (1) в виде соответствующей правильной С-дроби, применив модифицированный алгоритм В. Висковатова. На основании (1) расчетным путем определяется следующая матрица:
в которой (-1)-строка и (0)-строка содержат дискетные значения входного x(kΔt) и дискретные значения выходного сигналов y(kΔt) в моменты времени {nΔt}
где α-1(nΔt) = x(nΔt); α0(nΔt) = y(nΔt), m=l,2,3,...; n=0,1,2,3,... .
Тогда элементы первого столбца матрицы (2) порождают частные числители правильной С-дроби, и ДПФ будет иметь вид:
При аппроксимации дробно-рациональной функции в матрице (2) наблюдается появление нулевой строки, номер которой позволяет идентифицировать порядок функции. Если в (0)-строке матрицы (2) конечные числа k первых элементов равны нулю, а последующие отличны от нуля, то необходимо осуществить сдвиг влево на k элементов и далее определить элементы матрицы (2) по правилу (3), при этом, восстанавливая правильную С-дробь (4), элементы α0(0) умножаются на z-k.
Существенным для данного правила является то, чтобы первый элемент (-1)-строки был отличен от нуля, то есть входное воздействие в начальный момент времени х(0)≠0. Получив ДПФ в виде (4) и свернув ее в дробно-рациональную функцию ,
,
переходят от данного выражения к непрерывной математической модели объекта с помощью взаимно однозначного соответствия
По ней однозначно определяется непрерывная реакция объекта в виде аналитической зависимости. Начиная с первого ненулевого значения реакции объекта, осуществляется обратное табулирование полученной зависимости, при котором определяется значение аргумента, соответствующего нулевому значению реакции. Зная момент начала действия входного сигнала и полученное значение времени, определяется время запаздывания с точностью, определяемой точностью табулирования.
Приведем пример, иллюстрирующий решение задачи SP-идентификации предлагаемым методом.
Пример 1
Известно, что модель, связывающая расход топлива с давлением тяги одновального турбинно-реактивного двигателя (ТРД), имеет вид
Пусть даны дискретные измерения вход-выходных переменных x(t), y(t) с шагом дискретизации Δt= 0.125 с при условии, что входной сигнал известен и представляет собой типовое ступенчатое воздействие. Тогда идентифицирующая матрица принимает вид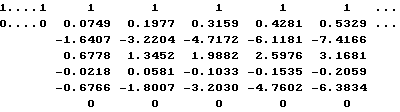
а ДПФ имеет вид
в которой нули и полюса
z1 n=0.88207, z2 n=0.77919, z1 н=0.68757, z2 н=-0.656668
В соответствии с аналогом временное запаздывание равно τ=k•Δt=4.375 с, и для повышения точности оценки временного запаздывания необходимо уменьшить шаг дискретизации.
В соответствии с предлагаемым подходом определим временное запаздывание с заданной точностью без изменения шага дискретизации. Используя обратное преобразование  получим для непрерывной передаточной функции
получим для непрерывной передаточной функции
s1 n=1.0038, s2 n=1.996, s1 н=2.9967,
и, следовательно, непрерывная передаточная функция (НПФ)
Восстановим непрерывную реакцию линейного объекта при единичном ступенчатом входном воздействии:
где
Для нахождения транспортного запаздывания τ зафиксируем первое ненулевое измерение переходной характеристики y(t)=0.07486 и момент времени t=4.375 с. Составим уравнение относительно неизвестной величины временного запаздывания τ, которое принимает вид
Полагая τ0 = 4.375 c, итерационно уменьшаем значение τ = τ-ε до тех пор, пока не получим численное решение уравнения с заданной точностью ε.
При ε=0.001 транспортное запаздывание τ=4.229 с, а при ε=0.0001 τ=4.3 с.
Тем самым мы полностью восстановили непрерывную модель объекта.
Данный подход можно использовать для идентификации линейных динамических объектов с переменным запаздыванием. (Например, на практике время запаздывания зависит от величины управляющего воздействия).
Пример 2
Математическая модель изменения площади проходного сечения сопла ТРД с изменением давления тяги описывается данной передаточной функцией:
 зависит от величины поперечного сечения сопла, τ0 = 3, k=2.
зависит от величины поперечного сечения сопла, τ0 = 3, k=2.
На вход подается ступенчатое воздействие x(t)=х•1(t).
I. Пусть x1=2, тогда τ(х)=3+1=4 и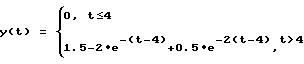
Δt=0.5 c
Тогда идентифицирующая матрица принимает вид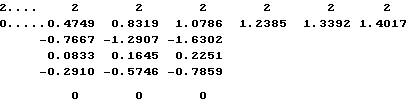
Восстанавливая ДПФ по первому столбцу идентифицирующей матрицы, получим
Используя принцип вариации шага дискретизации при Δt=0.125 с, получим ДПФ: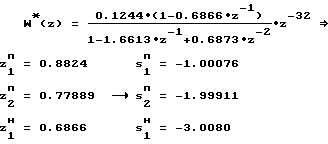
Определим момент времени, при котором значение выходного сигнала отлично от нуля
τ0 = 4.125 c,
тогда получим НПФ
определим непрерывную реакцию объекта в виде
где





Согласно вышеприведенной методике определим величину транспортного запаздывания с заданной точностью ε=0.0001: τм = 4c.
II. Пусть х2=4, тогда  период дискретизации оставляем без изменения Δt=0.125 с. Выполняя преобразования, аналогичные (I), получим
период дискретизации оставляем без изменения Δt=0.125 с. Выполняя преобразования, аналогичные (I), получим
τ0 = 3.625 c,
τм = 3.5 c при ε=0,0001
Выполняя аналогичные выкладки, на следующих этапах получаем
III. x3=6, τ(х)=3.333, Δt=0.125c,
τ0 = 3.375 c,
τм = 3.333 c при ε=0,0001
IV. x3=8, τ(х)=3,25, Δt=0.125 с,
τ0 = 3.375 c,
τм = 3.250 c при ε=0,0001.
V. x3=10, τ(х)=3,2, Δt=0.125 с,
τ0 = 3.25 c,
τм = 3.20 c, при ε=0,0001.
На следующем этапе, используя обратные разности (дробь Тиле), построим зависимость для определения переменного запаздывания.
Получаем следующие значения в интерполяционной таблице: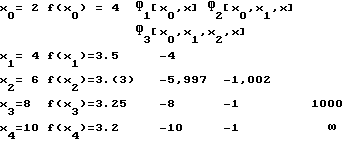
Для приведенной таблицы получим интерполяционную непрерывную дробь вида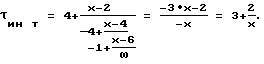
Таким образом, приведенная методика позволяет определить величину переменного запаздывания с наперед заданной точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 1999 |
|
RU2146063C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 2002 |
|
RU2233480C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 2001 |
|
RU2189622C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 1995 |
|
RU2097818C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕАРИЗОВАННОГО ДИНАМИЧЕСКОГО ОБЪЕКТА | 2003 |
|
RU2256950C2 |
| СПОСОБ АНАЛИЗА МНОГОЧАСТОТНЫХ СИГНАЛОВ, СОДЕРЖАЩИХ СКРЫТЫЕ ПЕРИОДИЧНОСТИ | 2009 |
|
RU2399060C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ МУЛЬТИСИНУСОИДАЛЬНЫХ ЦИФРОВЫХ СИГНАЛОВ | 2018 |
|
RU2703933C1 |
| Способ идентификации мультисинусоидальных цифровых сигналов | 2022 |
|
RU2787309C1 |
| СПОСОБ ПАРАМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ МАТЕМАТИЧЕСКОЙ МОДЕЛИ СУДНА | 2010 |
|
RU2444043C1 |
| Способ идентификации нелинейных систем | 2019 |
|
RU2714612C1 |
Изобретение относится к технической кибернетике и предназначено для идентификации линейных динамических объектов с переменным запаздыванием. Технический результат заключается в повышении точности и достоверности результатов моделирования объекта управления. Способ заключается в определении времени переменного запаздывания на основе информации о сигналах объекта на входе и выходе и может быть реализован с использованием ЭВМ в автоматическом режиме, в реальном масштабе времени. 1 ил.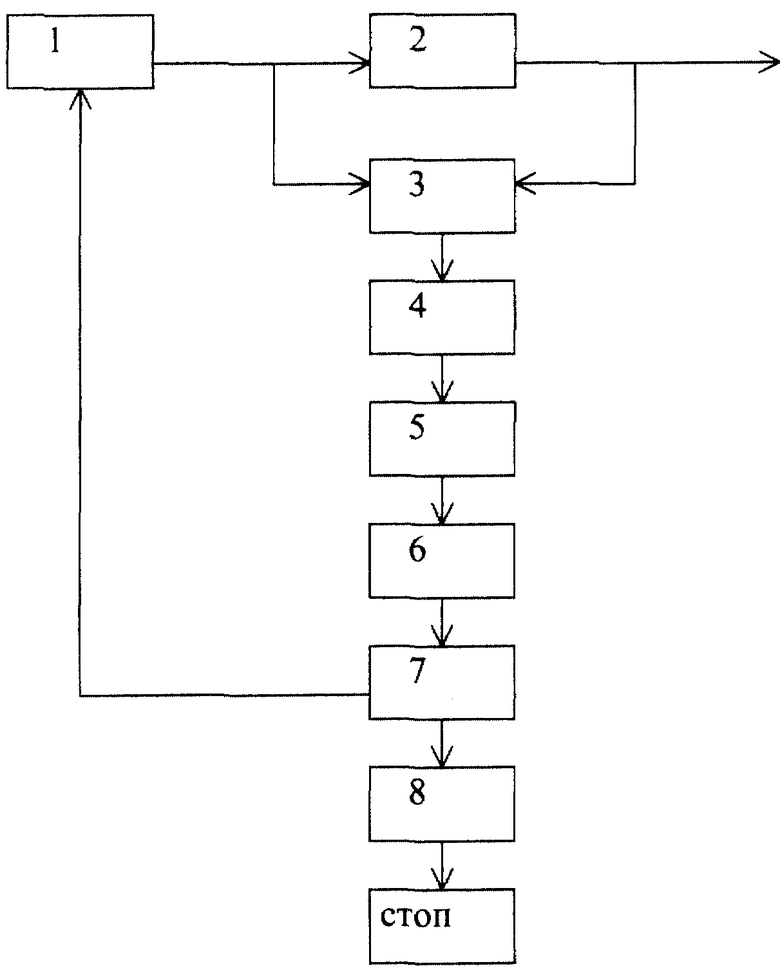
Способ идентификации линейного объекта путем определения значений входного и выходного сигналов объекта, подачи их на идентификатор непрерывной дроби с последующим восстановлением дискретной математической модели объекта, отличающийся тем, что для фиксированного входного сигнала по параметрам дискретной математической модели объекта восстанавливают непрерывную математическую модель реакции объекта, в которой определяют дискретные модельные значения выходного сигнала объекта, из множества дискретных модельных значений выходного сигнала определяют момент времени, при котором значение данного сигнала отлично от нуля, при этом шаг задают меньше наперед заданной точности и путем обратного табулирования от момента времени, при котором дискретное модельное значение выходного сигнала отлично от нуля, определяют величину транспортного запаздывания объекта, значение этой величины запасают в блоке хранения, затем изменяют амплитуду входного сигнала и повторяют весь процесс до определения величины транспортного запаздывания объекта, при этом накопленные значения величин транспортного запаздывания используют для идентификации переменного запаздывания объекта путем аппроксимирования времени переменного запаздывания дробями Тиле.
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 1999 |
|
RU2146063C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНЫХ ОБЪЕКТОВ УПРАВЛЕНИЯ | 1994 |
|
RU2079870C1 |
| Устройство для идентификации статических параметров многосвязной автоматической системы | 1986 |
|
SU1474596A1 |
| US 4451878 A, 29.05.1984. | |||

