Область техники
Изобретение относится к судостроению, а именно к движительным устройствам в частности к движительным комплексам типа винт-насадка подводного объекта, и может быть использовано в качестве движителя надводного судна или для перемещения подводных объектов, путем образования струи и создания движущей продольной силы.
Уровень техники
Известны движительные комплексы судов, содержащие гребные винты, установленные с перекрытием дисков винтов, что позволяет повысить гидродинамический КПД таких комплексов.
Однако такие движительные комплексы недостаточно эффективны при высоких значениях коэффициента нагрузки по упору.
Известен также движительный комплекс типа винты в насадке, содержащий два или четыре гребных винта, причем между гребными винтами расположена кормовая часть судна (патент №2101210, МПК B63G 8/00 (1995.01), B63G 8/08 (1995.01), Опубликовано: 10.01.1998) или (патент №2681415, МПК B63G 8/00 (2006.01), Опубликовано: 06.03.2019 Бюл. №7) в котором обтекаемый корпус содержит группу из трех или четырех кормовых маршевых реверсивных водометных движителей. Входные и выходные патрубки движителей жестко закреплены в корпусе аппарата. При этом входные отверстия входных патрубков маршевых движителей выполнены в виде единой кольцевой щели по периметру корпуса аппарата в поперечном сечении, а в выходных отверстиях выходных патрубков кормовых маршевых водометных движителей установлены направляющие пластины.
Однако такая конструкция приводит к росту габаритов комплекса и снижению его эффективности из-за невозможности снижения потерь с окружными вызванными скоростями, но такая конструкция позволяет создавать разный упор на дисках винтов и повысить управляемость. Возникает необходимость дополнительно ставить группу носовых поперечных движителей для повышения управляемости.
Наиболее близким к предлагаемому изобретению, по своей технической сущности, является движительный комплекс двухвального судна (авт.св. СССР №846395, опубл. 1975), содержащий гребные винты, диски которых размещены в одной плоскости и установлены в насадке с перекрытием дисков винтов, за счет чего достигается повышение гидравлического КПД и уменьшение поперечных габаритов движительного комплекса-прототип.
Недостатком размещения дисков винтов в одной плоскости с перекрытием дисков винтов с количеством лопастей винтов более 2 не позволяет создавать достаточный упор при высоких нагрузках на малых скоростях вращения винтов в режиме, например, экономического хода с высоким гидравлическим КПД. Не регулируемый шаг винтов не позволяет эффективно использовать мощности приводного двигателя.
Недостатком данной конструкции является низкое значение тяги и пропульсивного коэффициента полезного действия, а также склонность к кавитации в периферийной области лопасти. На высокой скорости поток воды, перемещаемый центробежной силой на большой скорости, ударяется во внутреннюю стенку кольцевой насадки и создает торможение вращающему моменту винта.
Недостатком также является одинаковый упор и постоянный шаг винтов. Это не позволяет эффективно использовать мощность приводного двигателя, но и не позволяет активно влиять на управляемость судна или подводного аппарата.
Раскрытие сущности изобретения
Задача изобретения-создание движительного комплекса типа винт-насадка для подводного аппарата с высоким гидравлическим КПД при высоких нагрузках на всех режимах работы как на прямых курсах, для обеспечения максимального упора на всех скоростях движения, так и с возможностью повышения управляемости судна или подводного аппарата на разных скоростях движения с обеспечением минимального радиуса циркуляции.
Технический результат от использования предложенного изобретения - увеличение управляемости подводного аппарата, упора и пропульсивного коэффициента полезного действия гребного винта, повышение энергетической эффективности на всех скоростях движения.
Поставленная задача достигается тем, что движительный комплекс подводного объекта, содержащий гребные винты и насадку, может иметь от 2 до 5 гребных винтов, ступицы которых расположены в одной плоскости на одной линии, на кривой или в вершинах прямоугольника.
Гребные винты попеременно выполнены правого и левого вращения, изменяемого шага, который может быть одинаковым и разным по величине и направлению, создаваемого упора, и каждый гребной винт имеет свой механизм изменения шага винта, общий редуктор, который обеспечивает синхронность вращения винтов, при этом винты установлены в насадке, огибающей дисковое пространство винтов с возможно малым - не более 0,5% от диаметра гребного винта зазором между концами лопастей и телом насадки, Диск каждого гребного винта пересекается с диском гребного винта на параллельном валу, а оси валов расположены на расстоянии, обеспечивающем зазор между втулкой винта и оконечностью лопасти гребного винта на параллельном валу.
Валы гребных винтов могут располагаться под разными углами, при этом оси валов могут пересекаться до и после общего дискового пространства гребных винтов, а стойки крепления насадки могут быть дополнительными горизонтальными и вертикальными рулями подводного объекта и оснащаться рулевыми поверхностями с отдельным приводом в пространстве до и после гребных винтов.
Каждый гребной винт движительного комплекса подводного объекта может быть выполнен из двух или более соосных гребных винтов с двумя или тремя лопастями, образующих параллельные дисковые пространства, при этом каждый диск винта пересекается с диском винта на параллельном валу или не пересекается и в этом случае он располагается в промежутке между параллельными дисковыми пространствами на параллельном валу, средние линии лопастей винтов на одном валу взаимно перпендикулярны, при этом профиль лопастей винтов, например, симметричный и максимально перекрывает дисковое пространство, шаговый угол винта может изменяться в пределах достаточных для обеспечения взаимного пересечения лопастей винта максимальной ширины с дисковым пространством лопастей винта на параллельном валу для обеспечения упора разного по величине и направлению на дисковых пространствах гребных винтов параллельных валов, при этом винты установлены в насадке, огибающей дисковое пространство всех винтов с возможно малым - не более 0,5% от диаметра гребного винта зазором между концами лопастей и телом насадки, а оси валов расположены на расстоянии, обеспечивающем зазор между втулкой винта и оконечностью лопасти гребного винта на параллельном валу. Валы гребных винтов движительного комплекса подводного объекта могут располагаться под разными углами, при этом оси валов могут пересекаться до и после общего дискового пространства гребных винтов.
Стойки крепления насадки имеют угол установки для компенсации закручивания потока гребными винтами, который определяется расчетным путем в зависимости от скорости вращения гребного винта.
Описанная сложная винтовая поверхность с переменной относительной шириной и переменным разнесением передней и задней части лопасти по ее высоте обеспечивает улучшение гидродинамических характеристик гребного винта. Две засасывающие и две нагнетающие поверхности одной лопасти гребного винта обеспечивают повышение тяговых характеристик винта.
Для подводного объекта необходимо иметь широкий диапазон скоростей движения, и высокую управляемость по вертикали и по горизонтали, что обеспечивается делением мощности приводного двигателя на несколько гребных винтов, которые могут создавать разный упор и обеспечивать управление без использования рулевых поверхностей за или перед дисковым пространством гребных винтов.
Изменяя положение лопастей гребного винта до оптимального шага, можно получить более высокий пропульсивный КПД, тем самым получить энергетическую эффективность, более высокий КПД каждого винта обеспечивает наилучшие эксплуатационные характеристики всего движительного комплекса с экономией топлива. Подводный объект или судно с винтами регулируемого шага может быстрее ускоряться с места и намного эффективнее тормозить, что делает остановку более быстрой и безопасной.
Изменение шага каждого гребного винта, который может быть одинаковым и разным по величине и направлению, создаваемого упора, позволяет создавать разную величину упора в разных местах объединенного дискового пространства, что позволяет повысить управляемость судна или подводного объекта, обеспечить безопасность эксплуатации. Для обеспечения разной величины и направления упора каждый гребной винт имеет свой механизм изменения шага винта.
При работе гребных винтов кроме закручивания, имеет место сужение потока воды, что приводит к некоторому уменьшению КПД винта. Для устранения этого явления применяют направляющие насадки. Насадка представляет собой кольцо в котором вращается гребной винт. Сечение насадки имеет профиль крыла, обращенного выпуклой поверхностью к винту. Насадка повышает коэффициент пропульсивности гребного винта. Винты с насадками успешно используются при необходимости создания дополнительного упора на малых скоростях хода.
При наличии нескольких гребных винтов объединенных в единое дисковое пространство возникает необходимость в насадке, огибающей дисковое пространство винтов с возможно малым - не более 0,5% от диаметра гребного винта зазором между концами лопастей и телом насадки.
Минимальная величина зазора принята равной 0,1% от диаметра D винта в виду того, что при меньшем ее значении возрастает величина гидравлического сопротивления, что ведет к увеличению энергозатрат.
При большем ее значении возрастает величина гидравлического сопротивления от увеличения трения в зазоре, что также ведет к увеличению энергозатрат, поэтому принято не более 0,5% от диаметра гребного винта зазором между концами лопастей и телом насадки. Величина зазора может определяться размерами и конструктивными особенностями гребных винтов и насадки.
Предложенный движительный комплекс типа винт-насадка для подводного объекта с компактным объединенным дисковым пространством взаимно-пересекающихся гребных винтов снабженных лопастями изменяемого шага с независимым изменением шага гребных винтов на параллельных валах позволяет создать движительный комплекс с высоким гидравлическим КПД при высоких нагрузках на всех режимах работы на прямых курсах с максимальным упором на всех скоростях движения, так и с возможностью повышения пространственной управляемости подводного аппарата на разных скоростях движения с обеспечением минимального радиуса циркуляции.
Технический результат от использования предложенного изобретения - увеличение упора и пропульсивного коэффициента полезного действия гребного винта, повышение управляемости подводного объекта и энергетической эффективности на всех скоростях движения.
Краткое описание чертежей
Для пояснения сущности предлагаемого изобретения
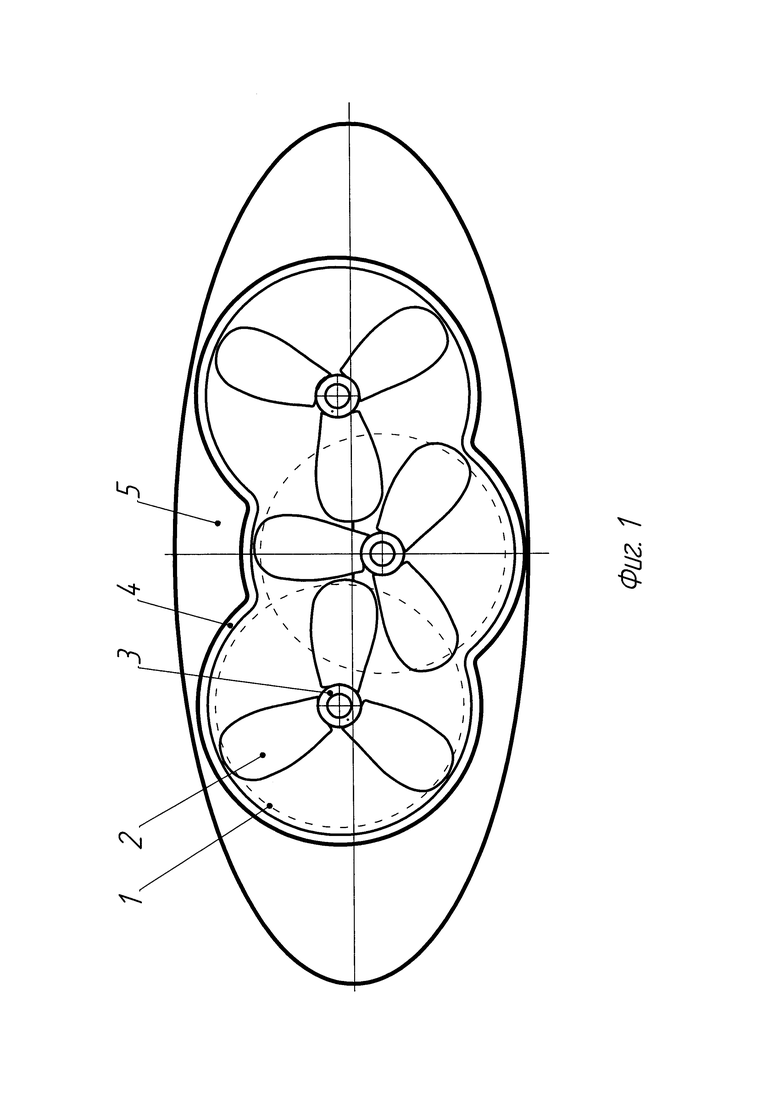
на фиг. 1 - вид на кормовую оконечность подводного аппарата с движительным комплексом в составе с 3 гребными винтами в насадке,
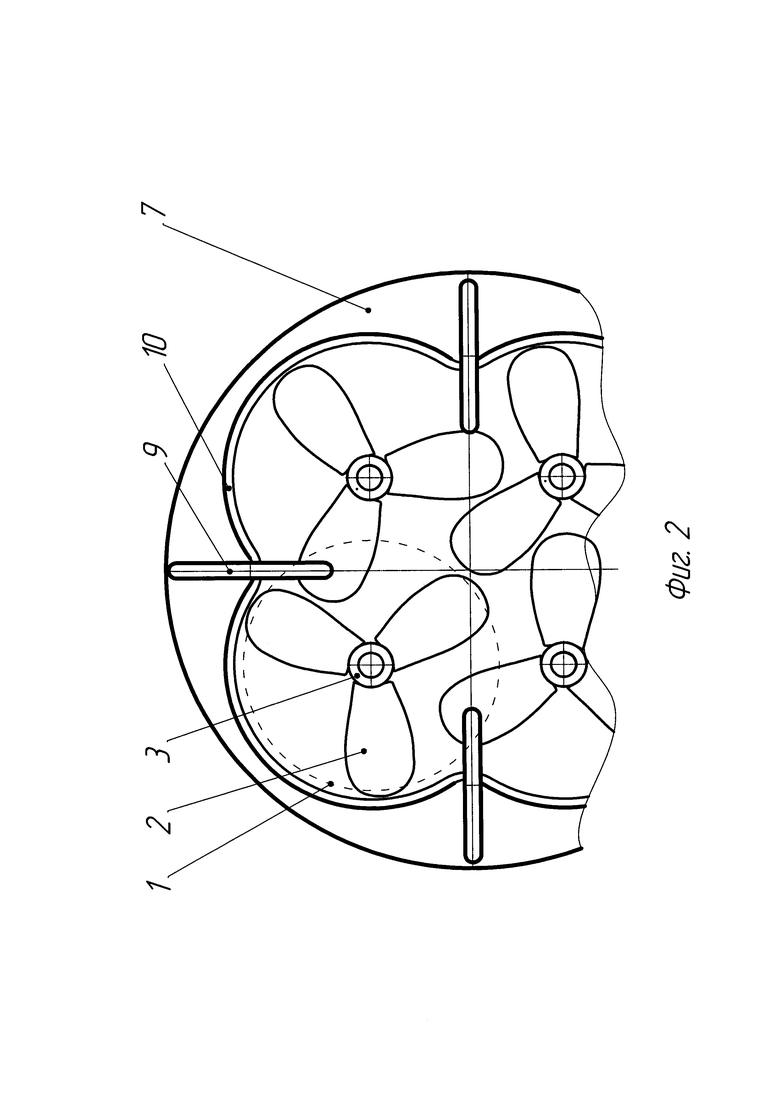
на фиг. 2 - представлен движительный комплекс с 4 гребными винтами на вершинах прямоугольника в насадке,
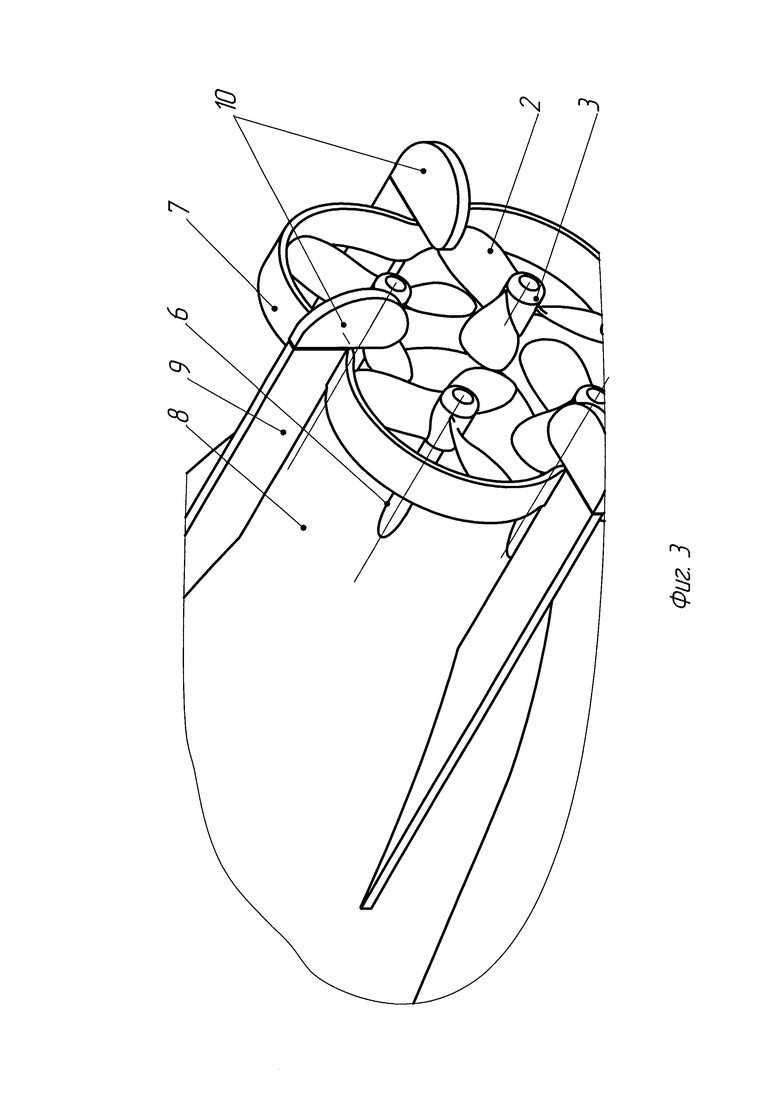
на фиг. 3 - представлен движительный комплекс с 4 гребными винтами в насадке с рулевыми поверхностями,
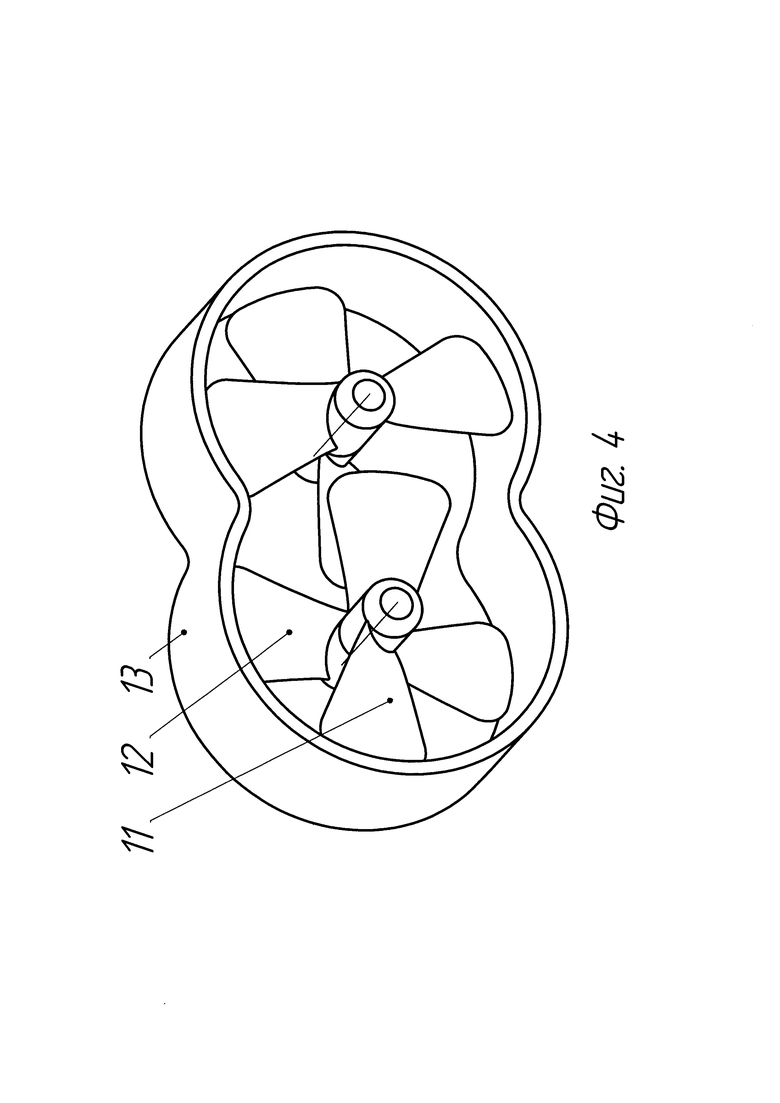
на фиг. 4 - представлен движительный комплекс с двумя двух-рядными винтами в насадке, где:
1 - гребной винт;
2 - лопасть;
3 - втулка;
4 - насадка;
5 - кормовая оконечность;
6 - вал;
7 - насадка;
8 - кормовая оконечность;
9 - стойка;
10 - рулевая поверхность;
11 - гребной винт;
12 - гребной винт;
13 – насадка.
Осуществление изобретения
На фиг. 1 изображен вид на кормовую оконечность 5 подводного объекта, снабженного движительным комплексом в составе трех гребных винтов 1. Каждый гребной винт 1 содержит три лопасти 2 изменяемого шага, которые установлены на втулке 3 винта, закрепленной на гребном валу, при этом диск гребного винта 1 пересекается с диском гребного винта 1 на параллельном валу. Возможно исполнение, когда дисковые пространства гребных винтов 1 не пересекаются, а параллельны и расположены на расстоянии не более 3% ширины дискового пространства винта 1 при максимальном шаге лопастей 2. В каждой втулке 3 гребного винта 1 расположен привод (условно не показан) изменения шага лопастей 2. Каждый гребной винт 1 имеет независимый привод изменения шага лопастей 2. Гребные винты 1 попеременно выполнены правого и левого вращения. Оси гребных винтов 1 находятся на разной высоте. Оба крайних гребных винта 1 расположены выше оси центрального гребного винта 1. Гребные винты 1 расположены в насадке 4 в кормовой оконечности 5 подводного объекта. Насадка 4 представляет собой сектора колец, огибающей дисковое пространство гребных винтов с возможно малым - не более 0,5% от диаметра гребного винта 1 зазором между концами лопастей 2 и телом насадки 4, в которых вращаются гребные винты 1. Сечение насадки 4 имеет профиль крыла, обращенного выпуклой поверхностью к винту.
Гребные валы приводятся во вращение от одного приводного двигателя через редуктор (условно не показаны) и вращаются синхронно. При вращении гребных винтов 1 при равенстве угловых скоростей лопасти 2 одного из гребных винтов 1 входят в промежуток между лопастями 2 другого гребного винта 1. Компактное расположение гребных винтов 1 позволяет уменьшить габариты движительного комплекса.
Внутри гребного вала расположен шток (условно не показан) привода механизма для изменения шага лопастей 2.
Движительный комплекс обеспечивает перемещение подводного объекта не только вперед или назад, при одновременном изменении шага лопастей 2 гребных винтов 1 по курсу, но и при выполнении подводным объектом маневрирования по любой траектории, при неравномерном изменении шага лопастей 2 крайних гребных винтов 1 движительного комплекса. В этом случае создаются разные по величине и направлению упоры на крайних гребных винтах 1.
При поступлении в движительный комплекс команды "движение вперед" одновременно начинают вращаться все гребные винты 1 с лопастями 2 выставляемые приводом на одинаковый шаг. Вода, находящаяся в насадке 4 под воздействием вращения гребных винтов 1 выбрасывается с ускорением из насадки 4, создавая упор движительного комплекса.
Перемещение подводного объекта и маневрирование им осуществляется непосредственно его движительным комплексом по командам, поступающим от системы управления (условно не показана) в приводные механизмы изменения шага лопастей 2 гребных винтов 1.
На фиг. 2, 3 изображен подводный объект, снабженный движительным комплексом в составе четырех гребных винтов 1, установленных в насадке 7, в кормовой оконечности 8 подводного аппарата. Гребные винты 1 попеременно выполнены правого и левого вращения, Оси гребных винтов 1 находятся на разной высоте, а втулки 3 гребных винтов 1 расположены на вершинах четырех-угольника. Каждый гребной винт 1 содержит три лопасти 2 изменяемого шага, которые установлены на втулке 3 винта, закрепленной на гребном валу 6, при этом каждый диск гребного винта 1 пересекается с диском гребного винта 1 на параллельном валу. При вращении гребных винтов 1 и при равенстве угловых скоростей всех гребных винтов 1, лопасти 2 одного из гребных винтов 1 входят в промежуток между лопастями 2 двух соседних гребных винтов 1.
Гребные винты 1 расположены в насадке 7, охватывающей все гребные винты 1, и установленной на стойках 9 в кормовой оконечности 8 подводного объекта. Насадка 7 представляет собой сектора колец, огибающей дисковое пространство винтов 1 с возможно малым - не более 0,5% от диаметра гребного винта 1 зазором между концами лопастей 2 и телом насадки 7, в которых вращаются гребные винты 1. Сечение насадки 7 имеет профиль крыла, обращенного выпуклой поверхностью к винту. Стойки 9 насадки представляют собой горизонтальные и вертикальные рули которые могут иметь рулевые поверхности 10 с отдельным приводом (условно не показан).
Гребные валы 6 приводятся во вращение от одного приводного двигателя через редуктор (условно не показаны) и вращаются синхронно. Внутри каждого гребного вала 6 расположен шток (условно не показан) привода механизма для изменения шага лопастей 2. Каждый шток привода механизма изменения шага лопастей 2 гребного винта 1 перемещается от воздействия отдельного приводного механизма (условно не показан).
Движительный комплекс, изображенный на фиг. 2, 3, обеспечивает перемещение подводного объекта не только вперед или назад при одновременном изменении шага лопастей 2 гребных винтов 1 по курсу, но и маневрирование подводного объекта по любой пространственной траектории, при неравномерном изменении шага лопастей 2 гребных винтов 1 движительного комплекса. В этом случае создаются разные по величине и направлению упоры на гребных винтах 1. Для увеличения управляемости используются рулевые поверхности 10 на стойках 9.
Шаг установки лопастей 2 и скорость вращения гребных винтов 1 движительного комплекса задается такой, что бы достичь максимальной энергетической эффективности и максимального гидравлического КПД движительного комплекса.
Движительный комплекс, изображенный на фиг. 4, выполнен в составе двух гребных винтов 11 и 12 установленных в насадке 13, в кормовой оконечности подводного аппарата, с перекрытием дисков гребных винтов 11, 12. Гребные винты 11, 12 соосные, двухлопастные, образующих два соосных параллельных дисковых пространства при этом каждый диск винта 11, 12 пересекается с диском винта 11, 12 соответственно на параллельном валу. Возможно исполнение, когда дисковые пространства гребных винтов 11 (или 12) на параллельных валах не пересекаются, а параллельны и расположены на расстоянии не более 3% ширины дискового пространства винта 11 при максимальном шаге лопастей.
В каждой втулке 11 гребного винта 1 расположен привод (условно не показан) изменения шага лопастей 2.
Гребные винты 8 попеременно выполнены правого и левого вращения. Каждый гребной винт 9 содержит две лопасти 10 изменяемого шага, которые установлены на втулке 11 винта 8, закрепленной на гребном валу.
Шаг лопастей 10 соосных и параллельных гребных винтов 9, например, одинаковый и изменяется на одинаковую величину, но может быть различным в зависимости от скорости вращения гребных винтов 8.
Средние линии лопастей 10 параллельных соосных винтов 9 на одном валу взаимно перпендикулярны, средним линиям лопастей 10 винтов 9 на параллельном валу, при этом профиль лопастей 10 винтов 9, например, симметричный, максимальной ширины и максимально перекрывает дисковое пространство. Шаговый угол каждого винта 9 может изменяться в пределах достаточных для обеспечения взаимного пересечения лопастей 10 винта 9 на параллельном валу.
Гребные валы приводятся во вращение от одного приводного двигателя через редуктор (условно не показаны) и вращаются синхронно. При вращении гребных винтов 8 при равенстве угловых скоростей лопасти 10 одного из гребных винтов 9 входят в промежуток между лопастями 10 другого гребного винта 9. При этом возможно уменьшение габаритов всего движительного комплекса с гребными винтами 8.
Взаимодействие пересекающихся гребных винтов отработано на пространственной модели в графическом редакторе, что позволяет выбрать оптимальные геометрические характеристики движительного комплекса для увеличения упора и пропульсивного коэффициента полезного действия гребных винтов подводного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Движительный комплекс объекта в водной среде | 2024 |
|
RU2840558C1 |
| Устройство компенсации реактивного момента несущего винта вертолета | 2021 |
|
RU2796703C2 |
| ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ПОДВОДНОГО АППАРАТА | 2002 |
|
RU2222469C1 |
| ПОЖАРНЫЙ ГИДРОВЕРТОЛЕТ-КРАН | 2022 |
|
RU2797539C1 |
| ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНЫЙ МОДУЛЬ КОЛЬЦЕВОЙ КОНСТРУКЦИИ | 2017 |
|
RU2670341C1 |
| ВОЗДУШНЫЙ ВИНТ С УПРАВЛЯЕМЫМИ ЗАКОНЦОВКАМИ ЛОПАСТЕЙ | 2021 |
|
RU2788116C1 |
| Устройство компенсации реактивного момента несущего винта вертолета | 2021 |
|
RU2788013C1 |
| КОЛЕСНЫЙ ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС СУДНА ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2456201C1 |
| ПРОПУЛЬСИВНЫЙ КОМПЛЕКС ТОРПЕДЫ, СПОСОБ РАБОТЫ И ВАРИАНТЫ ДВИЖИТЕЛЯ | 2020 |
|
RU2757339C1 |
| ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС СУДНА | 2017 |
|
RU2661271C2 |
Изобретение относится к судостроению, а именно к движительным устройствам в частности к движительным комплексам типа винт-насадка подводного объекта, и может быть использовано в качестве движителя подводного объекта, путем образования струи и создания движущей продольной силы. Движительный комплекс подводного объекта содержит гребные винты и насадку. Количество винтов может быть от 2 до 5, ступицы которых расположены в одной плоскости на одной линии, на кривой или в вершинах прямоугольника. Винты попеременно выполнены правого и левого вращения, изменяемого шага, который может быть одинаковым и разным по величине и направлению, создаваемого упора. Каждый винт имеет свой механизм изменения шага винта. Общий редуктор обеспечивает синхронность вращения винтов, при этом винты установлены в насадке, огибающей дисковое пространство винтов с возможно малым - не более 0,5% от диаметра гребного винта зазором между концами лопастей и телом насадки. Диск гребного винта пересекается с диском гребного винта на параллельном валу, а оси валов расположены на расстоянии, обеспечивающем зазор между втулкой винта и оконечностью лопасти гребного винта на параллельном валу. Достигается увеличение управляемости подводного аппарата, упора и пропульсивного коэффициента полезного действия гребного винта, повышение энергетической эффективности на всех скоростях движения. 2 н. и 2 з.п. ф-лы, 4 ил.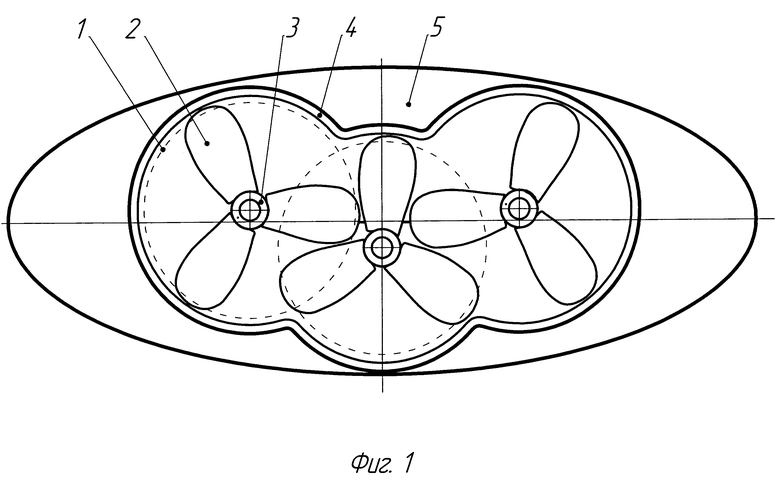
1. Движительный комплекс подводного объекта, содержащий гребные винты и насадку, отличающийся тем, что количество винтов может быть от 2 до 5, ступицы которых расположены в одной плоскости на одной линии, на кривой или в вершинах прямоугольника, винты попеременно выполнены правого и левого вращения, изменяемого шага, который может быть одинаковым и разным по величине и направлению, создаваемого упора, каждый винт имеет свой механизм изменения шага винта, общий редуктор обеспечивает синхронность вращения винтов, при этом винты установлены в насадке, огибающей дисковое пространство винтов с возможно малым - не более 0,5% от диаметра гребного винта зазором между концами лопастей и телом насадки, при этом диск гребного винта пересекается с диском гребного винта на параллельном валу, а оси валов расположены на расстоянии, обеспечивающем зазор между втулкой винта и оконечностью лопасти гребного винта на параллельном валу.
2. Движительный комплекс подводного объекта по п.1, отличающийся тем, что валы гребных винтов могут располагаться под разными углами, при этом оси валов могут пересекаться до и после общего дискового пространства гребных винтов, а стойки крепления насадки могут быть дополнительными горизонтальными и вертикальными рулями подводного объекта и оснащаться рулевыми поверхностями с отдельным приводом в пространстве до и после гребных винтов.
3. Движительный комплекс подводного объекта, отличающийся тем, что каждый гребной винт выполнен из двух или более соосных гребных винтов с двумя или тремя лопастями, образующих параллельные дисковые пространства при этом каждый диск винта пересекается с диском винта на параллельном валу или не пересекается и в этом случае он располагается в промежутке между параллельными дисковыми пространствами на параллельном валу, средние линии лопастей винтов на одном валу взаимно перпендикулярны, при этом профиль лопастей винтов, например симметричный, максимально перекрывает дисковое пространство, шаговый угол винта может изменяться в пределах, достаточных для обеспечения взаимного пересечения лопастей винта максимальной ширины с дисковым пространством лопастей винта на параллельном валу, для обеспечения упора разного по величине и направлению на дисковых пространствах гребных винтов параллельных валов, при этом винты установлены в насадке, огибающей дисковое пространство всех винтов с возможно малым - не более 0,5% от диаметра гребного винта зазором между концами лопастей и телом насадки, а оси валов расположены на расстоянии, обеспечивающем зазор между втулкой винта и оконечностью лопасти гребного винта на параллельном валу.
4. Движительный комплекс подводного объекта по п.3, отличающийся тем, что валы гребных винтов могут располагаться под разными углами, при этом оси валов могут пересекаться до и после общего дискового пространства гребных винтов.
| Движительный комплекс | 1979 |
|
SU846395A1 |
| Движительный комплекс судна | 1989 |
|
SU1740245A1 |
| US 3772886 A1, 20.11.1973 | |||
| CN 107380383 A, 24.11.2017 | |||
| Малогабаритный многофункциональный автономный необитаемый подводный аппарат - носитель сменной полезной нагрузки | 2018 |
|
RU2681415C1 |
| ДВУХЛЕЗВИЙНАЯ САМОУСТАНАВЛИВАЮЩАЯСЯ РАЗВЕРТКА | 0 |
|
SU205521A1 |

