Настоящее изобретение относится к области измерительной техники, а именно, к информационным преобразователям линейных низкочастотных ускорений с компенсационным преобразованием.
Известен компенсационный акселерометр, содержащий корпус, чувствительный элемент, датчик положения, дифференциальный магнитоэлектрический силовой преобразователь с кольцевой катушкой на чувствительном элементе и двумя магнитными системами в корпусе, причем в каждую магнитную систему входит постоянный магнит [1].
Такой компенсационный акселерометр имеет сложную конструкцию, вызванную наличием двух магнитных систем.
Наиболее близким по технической сущности является компенсационный акселерометр [2], который содержит корпус, установленную в нем пластину с двумя параллельными друг другу основными поверхностями, в которой выполнены подвижная рамка и неподвижная рамка, соединенные между собой упругими перемычками, n(n-2,3. . .) грузов, расположенных на подвижной рамке по окружности с центром в центре подвижной рамки, датчик положения, магнитоэлектрический силовой преобразователь с постоянным магнитом на корпусе и кольцевой компенсационной катушкой, установленной на грузах на подвижной рамке, усилитель.
Недостатком такого компенсационного акселерометра является температурная погрешность смещения градуировочной характеристики вследствие температурных деформаций компенсационной катушки.
Техническим результатом изобретения является повышение точности компенсационного акселерометра вследствие снижения температурной погрешности смещения градуировочной характеристики компенсационного акселерометра.
Данный технический результат достигается в компенсационном акселерометре, содержащем корпус, установленную в нем пластину с двумя параллельными друг другу основными поверхностями, в которой выполнены подвижная рамка и неподвижная рамка, соединенные между собой упругими перемычками, n(n=2,3...) грузов, расположенных на подвижной рамке по окружности с центром в центре подвижной рамки, датчик положения, магнитоэлектрический силовой преобразователь с постоянным магнитом на корпусе и кольцевой компенсационной катушкой, установленной на грузах на подвижной рамке, усилитель, тем, что один или несколько грузов вплоть до n-го груза выполнены в виде упругого элемента, каждый упругий элемент выполнен с жесткостью к изгибу относительно оси изгиба, расположенный в параллельной основным поверхностям пластины плоскости перпендикулярно к радиусу, соединяющему центр подвижной рамки с упругим элементом, по крайней мере на порядок меньшей жесткости к изгибу подвижной рамки относительно оси, проходящей через центр подвижной рамки и параллельной оси изгиба упругого элемента.
В одном частном случае выполнения компенсационного акселерометра каждый упругий элемент выполнен в виде плоской пружины, обе наибольшие по площади поверхности которой расположены перпендикулярно к радиусу, проведенному из центра подвижной рамки к плоской пружине.
В другом частном случае выполнения компенсационного акселерометра в плоской пружине выполнены две полки, каждая из которых расположена вдоль плоскости, параллельной основным поверхностям пластины, каждая из полок расположена по сравнению с другой полкой по разные стороны от оси изгиба плоской пружины, одна из полок расположена на подвижной рамке, к другой полке прикреплена компенсационная катушка.
В третьем частном случае выполнения компенсационного акселерометра каждая из полок расположена по одну из сторон относительно наибольших поверхностей плоской пружины.
В четвертом частном случае выполнения компенсационного акселерометра одна из полок расположена по одну сторону с одной из наибольших поверхностей плоской пружины по направлению к центру подвижной рамки, другая полка расположена по одну сторону с другой из наибольших поверхностей плоской пружины по направлению от центра подвижной рамки.
В пятом частном случае выполнения компенсационного акселерометра пластина и упругий элемент выполнены из монокристаллического материала, например, кремния.
В результате выполнения одного или нескольких грузов на подвижной рамке в виде упругого элемента, например, плоской пружины, выполнения каждого упругого элемента с жесткостью к изгибу относительно оси изгиба, расположенной в параллельной основным поверхностям пластины перпендикулярно к радиусу, соединяющему центр подвижной рамки с упругим элементом, по крайней мере на порядок меньшей жесткости к изгибу подвижной рамки относительно оси, проходящей через центр подвижной рамки и параллельной оси изгиба упругого элемента, достигается устранение деформации изгиба подвижной рамки при температуре воздействия, так как температурная деформация компенсационной катушки силового преобразователя вызывает деформацию изгиба упругих элементов, а не подвижной рамки. При отсутствии температурной деформации подвижной рамки в датчике положения не происходит изменение его сигнала, поэтому уменьшается температурная погрешность смещения градуировочной характеристики компенсационного акселерометра, и повышается точность измерения ускорения.
При выполнении пластины и упругих элементов из монокристаллического материала, например кремния, уменьшается температурная деформация подвижной рамки вследствие уменьшения температурных деформаций в местах соединения упругих элементов и подвижной рамки. В результате уменьшается температурная погрешность смещения градуировочной характеристики, повышается точность измерения ускорения посредством компенсационного акселерометра.
На фиг. 1 изображен общий вид компенсационного акселерометра.
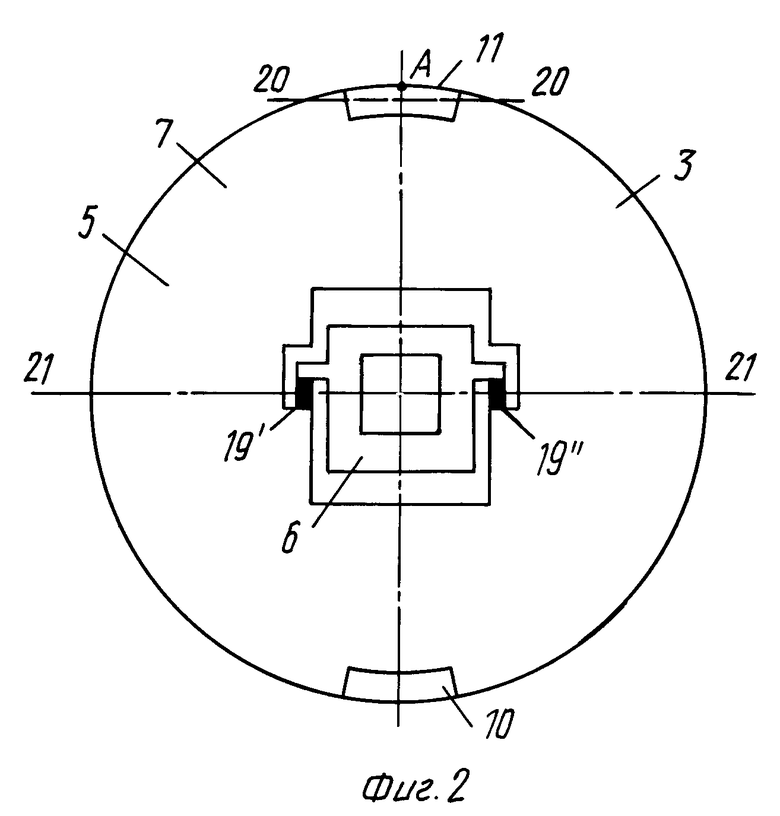
На фиг. 2 представлен фронтальный вид пластины компенсационного акселерометра, выполненного в соответствии с фиг. 1.
На фиг. 3 дан фронтальный вид пластины в общем случае выполнения грузов в виде упругих элементов.
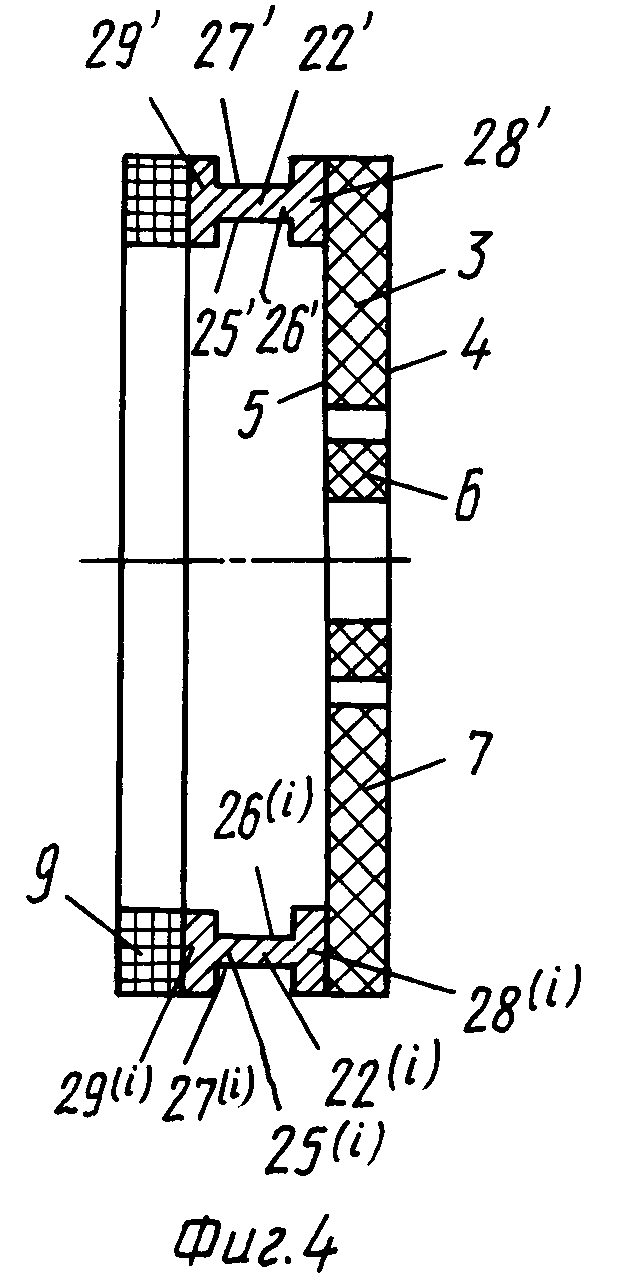
На фиг. 4 представлен разрез пластины с упругими элементами в виде плоских пружин.
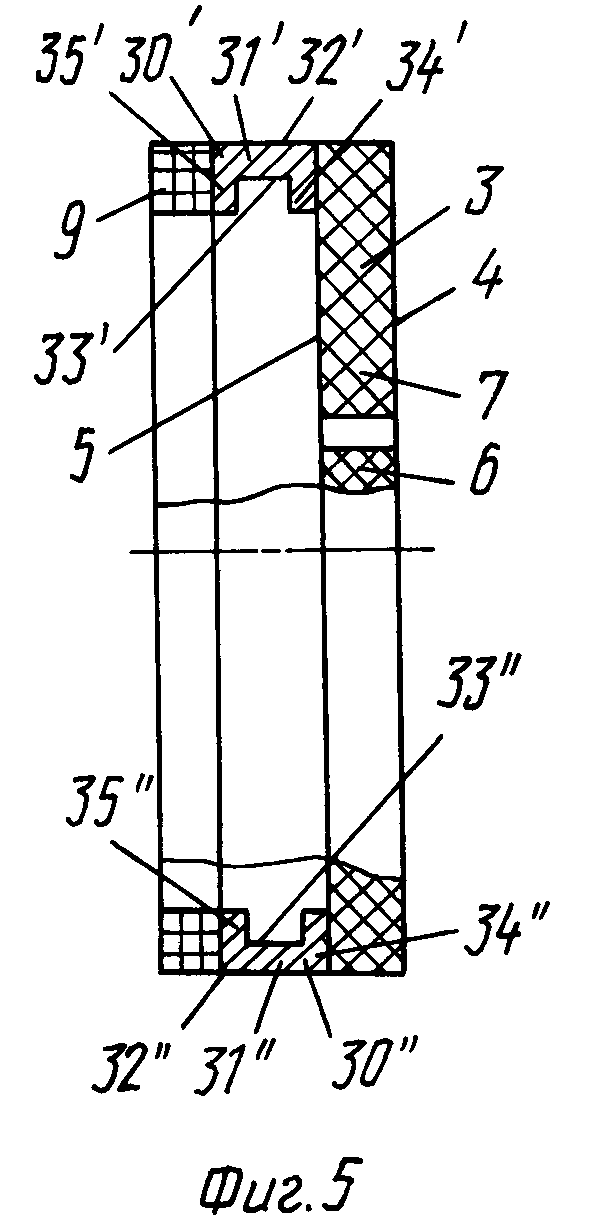
На фиг. 5 показан один частный случай выполнения плоских пружин.
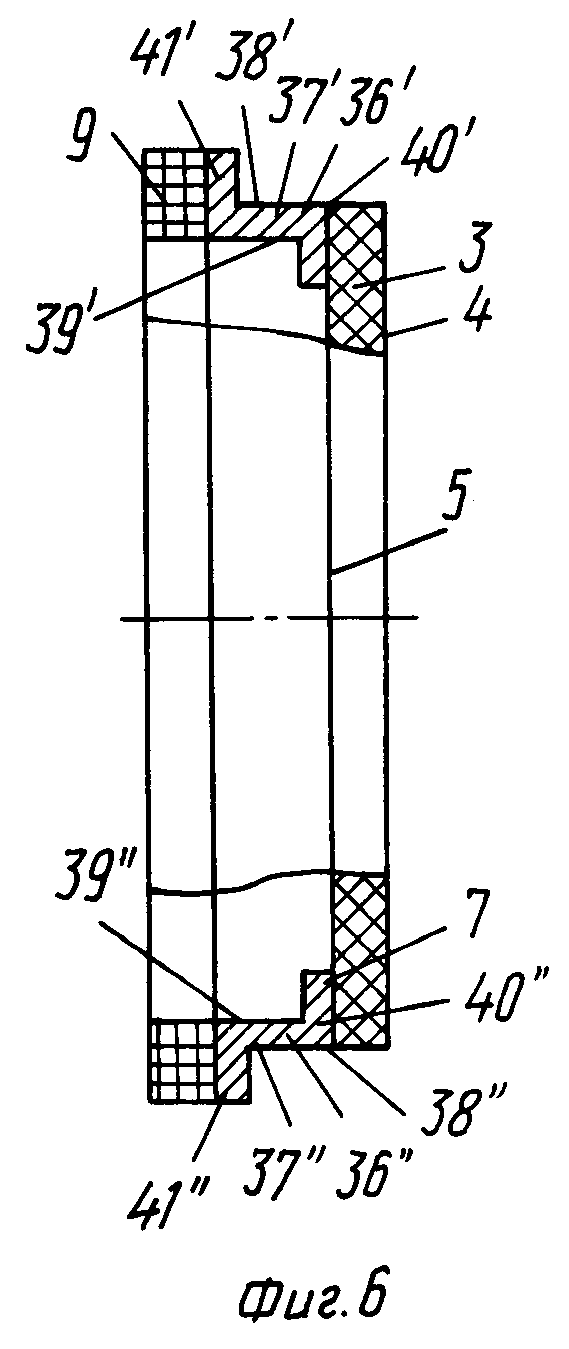
На фиг. 6 показан другой частный случай выполнения плоских пружин.
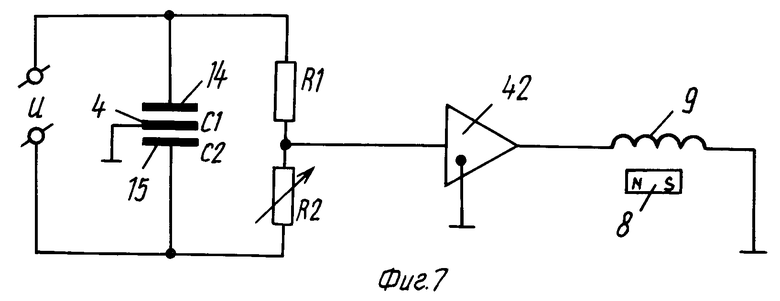
На фиг. 7 представлена электрическая схема компенсационного акселерометра.
Компенсационный акселерометр (фиг. 1) содержит корпус 1 со стойкой 2, на которой установлена пластина 3 с параллельными друг другу основными поверхностями 4, 5. В пластине 3 выполнены неподвижная рамка 6 и подвижная рамка 7. Магнитоэлектрический силовой преобразователь компенсационного акселерометра содержит дисковый постоянный магнит 8 с диаметральным направлением намагниченности, установленный на стойке 2 корпуса 1, и компенсационную катушку 9, прикрепленную к подвижной рамке 7 посредством груза 10 и упругого элемента 11, являющегося одновременно и грузом. Груз 10 и упругий элемент 11 расположены на основной поверхности 5 подвижной рамки 7. На другой основной поверхности 4 подвижной рамки 7 установлен груз 12.
Упругий элемент 11 может быть выполнен, например, в виде бруска из резины.
На плате 13 расположены электроды 14, 15 емкостного датчика положения.
В фланце 16 корпуса 1 выполнены отверстия 17', 17'' для крепления компенсационного акселерометра на объекте использования.
Корпус 1 закрыт крышкой 18. Неподвижная рамка 6 и подвижная рамка 7 соединены между собой упругими перемычками 19', 19'' (фиг. 2). Жесткость упругого элемента 11 относительно оси изгиба 20-20, перпендикулярной проведенному из центра О подвижной рамки 7 в точку A радиуса, выполнена по крайней мере на порядок меньшей жесткости к изгибу подвижной рамки 7 относительно оси 21 - 21, проходящей через центр 0 подвижной рамки 7 параллельно оси изгиба 20 - 20 упругого элемента 11.
В более общем случае (фиг. 3) на подвижной рамке 7 расположены n (n-2,3. ..) упругих элементов 22', 22''... 22i...22(n), являющихся одновременно грузами. Оси изгиба 23'-23'; 23''-23'',...23(i)-23(i)...23(n)-23(n) упругих элементов 22', 22''...22(i)...22(n) перпендикулярны соответственно к радиусам OB', OB''...OB(i)...OB(n), соединяющим центра подвижной рамки 7 с упругими элементами 22', 22''...22(i)...22(n). Жесткости к изгибу упругих элементов 22', 22''...22(i), 22(n) относительно осей изгиба 23'-23'; 23''-23'';.. . 23(i)-23(i); . ..23(n)-23(n) выполнены по крайней мере на порядок меньшими жесткости к изгибу подвижной рамки 7 относительно осей 24'-24'; 24''-24''; . .. 24(i)-24(i);...24(n)-24(n), параллельных соответствующим осям изгиба упругих элементов 22', 22''... 22(i)...22(n) и проходящих через центр О подвижной рамки 7.
Упругие элементы 22', 22''...22(i)...22(n) выполнены идентичными.
В разрезе на фиг. 4 упругий элемент 22' выполнен в виде плоской пружины 25', имеющий две наибольшие по площади поверхности 26', 27', расположенные перпендикулярно к радиусу, проведенному из центра подвижной рамки 7 к упругому элементу 22'. В плоской пружине 25' выполнены две полки 28' и 29'' соответственно, расположенные по разные стороны от оси изгиба 23' - 23' вдоль плоскостей, параллельных основным поверхностям 4,5 пластины 3.
В i-м упругом элементе 22(i) выполнена плоская пружина 25(i) с двумя наибольшими по площади поверхностями 26(i), 27(i) и полками 28(i), 29(i). Поверхности 26(i), 27(i) плоской пружины 25(i) перпендикулярны к радиусу, проведенному из центра подвижной рамки 7 к упругому элементу 22(i). Полки 28(i), 29(i) расположены по разные стороны от оси изгиба 23(i) - 23(i) вдоль плоскостей, параллельных основным поверхностям 4, 5 пластины 3.
К поверхностям полок 29', 29''...29(i)...20(n) плоских пружин 25', 25''. . . 25(i). ..25(n) прикреплена компенсационная катушка 9. Полки 28', 28''... 28(i). . . 28(n) плоских пружин 25', 25'',...25(i)....25(n) установлены на основной поверхности 5 подвижной рамки 7.
В частном случае выполнения компенсационного акселерометра (фиг. 5) в упругих элементах 30', 30'' с плоскими пружинами 31', 31'' относительно их наибольших по площади поверхностей 32', 32'', 33', 33'' полки 34', 34'', 35', 35'' расположены по одну сторону от соответствующих наибольших поверхностей 33', 33''.
В другом частном случае (фиг. 6) в упругих элементах 36', 36'' с плоскими пружинами 37', 37'', у которых наибольшие по площади поверхности 38', 38'', 39', 39'' расположены перпендикулярно к радиусам, идущим от центра подвижной рамки 7 к упругим элементам 36', 36'', полки 40', 40'' расположены по направлению к центру подвижной рамки 7 по одну сторону с наибольшими поверхностями 39', 39'' соответственно. Полки 41', 41'' расположены по направлению от центра подвижной рамки 7 по одну сторону с наибольшими поверхностями 38', 38'' плоских пружин 37', 37'' соответственно.
Пластина 3 вместе с подвижной рамкой 7, неподвижной рамкой 6 и упругими перемычками 19', 19'', а также упругие элементы 23', 22'' ...22(i)...22(n), 30', 30'', 36', 36'' могут быть выполнены из монокристаллического кремния методом анизотропного травления.
Датчик положения компенсационного акселерометра (фиг. 7) выполнен по мостовой схеме и содержит конденсаторы C1, C2 и резисторы R1, R2. Конденсатор C1 образован электродом 14 на плате 13 и электропроводной поверхностью 4 подвижной рамки 7. Конденсатор С2 образован электродом 15 на плате 13 и электропроводной поверхностью 4 подвижной рамки 7. Электропроводная поверхность 4 получается в результате изготовления пластины 3 из электропроводного материала или монокристаллического кремния.
Одна диагональ мостовой схемы датчика положения соединена с источником переменного тока напряжения U, вторая диагональ мостовой схемы соединена с входом усилителя акселерометра 42, выход которого соединен с компенсационной катушкой 9 силового преобразователя.
Компенсационный акселерометр (фиг. 1) работает следующим образом. При наличии измеряемого линейного ускорения, вектор которого направлен перпендикулярно основным поверхностям 4,5 пластины 3, на подвижную рамку 7, грузы 10, 11, 12 и компенсационную катушку 9 действует инерционная сила, которая вызывает угловое перемещение подвижной рамки 7 относительно неподвижной рамки 6. При этом изменяются расстояния между электродами 14, 15 на плате 13 и электропроводной поверхностью 4 подвижной рамки 7.
В результате изменяются емкости конденсаторов C1-2 (фиг. 7), происходит разбаланс мостовой схемы датчика положения, и на вход усилителя акселерометра 42 поступает сигнал с датчика положения. После усиления по амплитуде и мощности и преобразования сигнала датчика положения в усилителе акселерометра 42 напряжение на его выходе прикладывается к компенсационной катушке 9. В результате через компенсационную катушку 9 протекает ток, магнитное поле которого взаимодействует с магнитным полем постоянного магнита 8, в силовом преобразователе создается компенсационная сила, уравновешивающая инерционную силу. Величина тока через компенсационную катушку 9, являющаяся выходным сигналом компенсационного акселерометра, пропорциональна ускорению, а направление тока определяется направлением вектора линейного ускорения.
При изменении температуры окружающей среды вследствие различных температурных коэффициентов линейного расширения материалов компенсационной катушки 9 и пластины 3 возникающее в компенсационной катушке 9 усилие вызывает деформацию упругого элемента 11 относительно оси изгиба 20-30 в направлении радиуса ОА (фиг. 1, 2). Вследствие большей жесткости к изгибу относительно оси 21-21 подвижной рамки 7, чем жесткость к изгибу относительно оси 20-20 упругого элемента 11, деформации подвижной рамки 7 не происходит. Поэтому не изменяется положение основной поверхности 4 подвижной рамки 7 относительно электродов 14, 15 на плате 13, выходной сигнал датчика положения остается неизменным, не изменяется выходной сигнал компенсационного акселерометра, величина смещения градуировочной характеристики компенсационного акселерометра остается постоянной. Таким образом уменьшается температурное изменение смешения градуировочной характеристики компенсационного акселерометра.
Аналогично возникающие в компенсационной катушке 9 усилия при температурных изменениях вызывают деформацию плоских пружин 22', 22''...22(i), 22(n), 31', 31'', 37', 37'' (фиг. 4, 5, 6), устраняющую деформацию подвижной рамки 7.
Источники информации
1. Патент США N 4498342, кл. G 01 P 15/13, 1985.
2. Патент РФ N 2051542, кл. G 01 P 15/08, 1994.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2039994C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2137141C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2140652C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2166762C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2193209C1 |
| АКСЕЛЕРОМЕТР НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 1992 |
|
RU2018131C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2165624C1 |
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР С УПРУГИМ ПОДВЕСОМ | 1991 |
|
RU2020484C1 |

Акселерометр является информационным преобразователем линейных низкочастотных ускорений с компенсационным преобразованием. В корпусе установлена пластина, в которой выполнены подвижная и неподвижная рамки. Рамки соединены упругими перемычками. На подвижной рамке установлено n грузов. Кольцевая компенсационная катушка магнитоэлектрического силового преобразователя установлена на грузах. Один или несколько грузов выполнены в виде упругого элемента. Каждый упругий элемент выполнен с жесткостью к изгибу относительно оси, перпендикулярной радиусу из центра подвижной рамки к упругому элементу, на порядок меньшей жесткости подвижной рамки относительно оси, параллельной оси изгиба упругого элемента. Такое выполнение грузов приводит к устранению деформации изгиба подвижной рамки при температурных воздействиях, что обеспечивает повышение точности измерения ускорения. 5 з.п. ф-лы, 7 ил.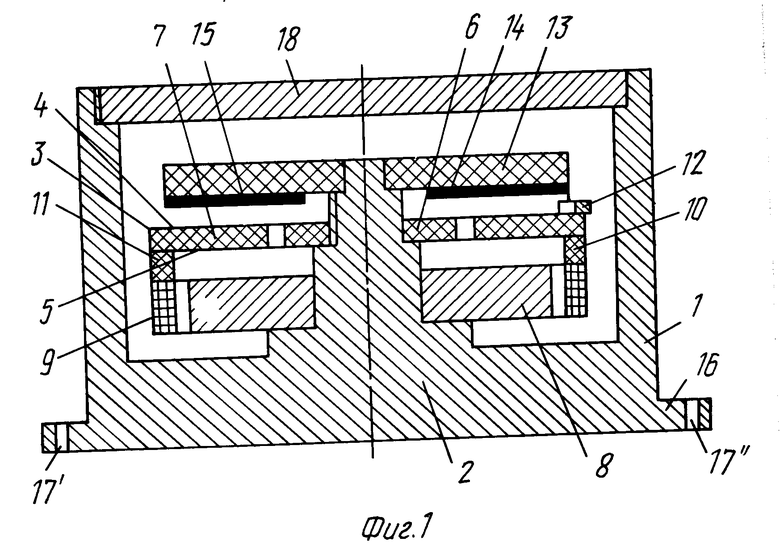
| RU 2051542 C1, 27.12.95 | |||
| US 4498342, 12.02.85 | |||
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1993 |
|
RU2046350C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
| ДАТЧИК ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2018133C1 |
