Данное изобретение относится к области измерительной техники, а именно к компенсационным преобразователям линейных и угловых ускорений.
Известен преобразователь инерциальной информации, содержащий основание, чувствительный элемент, преобразователи линейного и углового положений, электростатические силовые преобразователи, усилители, к входам которых подключены выходы преобразователей положения, а к выходам - электростатические силовые преобразователи [1].
Недостатком такого преобразователя инерциальной информации является малый диапазон измерений вследствие ограничения величины напряжения, прилагаемого к электростатическому силовому преобразователю на верхнем пределе измерений.
Наиболее близким по технической сущности является преобразователь инерциальной информации [2] , содержащий основание, чувствительный элемент из шести одинаковых частей, расположенных попарно по каждой из трех взаимно перпендикулярных осей, узлы ориентации чувствительного элемента в основании, датчики линейного положения чувствительного элемента по каждой оси, датчики углового положения чувствительного элемента относительно каждой оси, два силовых преобразователя магнитоэлектрического типа по каждой оси, которые выполнены с расположением действия их силы в одинаковом направлении вдоль данной оси по разные стороны от данной оси относительно друг друга и каждый из которых содержит компенсационную катушку на чувствительном элементе и магнитную систему с постоянным магнитом в узле ориентации; содержащий первый дифференциальный усилитель по каждой оси, к входу которого подключен датчик линейного положения по данной оси, второй дифференциальный усилитель по каждой оси, к входу которого подключен датчик углового положения относительно данной оси, первый и второй суммирующие усилители по каждой оси с общей линией на выходе, причем по каждой оси выходы первого и второго дифференциальных усилителей подключены к суммирующим входам первого суммирующего усилителя, к суммирующему входу второго суммирующего усилителя подключен выход одного из дифференциальных усилителей, к инверсному входу второго суммирующего усилителя подключен выход другого дифференциального усилителя, к выходу первого суммирующего усилителя подключен один вывод компенсационной катушки одного силового преобразователя, к выходу второго суммирующего усилителя подключен один вывод компенсационной катушки другого силового преобразователя из двух силовых преобразователей, размещенных по одной оси.
Для разделения сигналов линейного и углового ускорений в таком преобразователе инерциальной информации требуются специальные технические средства, такие как суммирующие устройства и устройства вычитания.
Техническим результатом настоящего изобретения является разделение сигналов линейного и углового ускорений в самом преобразователе инерциальной информации посредством простых средств.
Данный технический результат достигается в преобразователе инерциальной информации, содержащем основание, чувствительный элемент из шести одинаковых частей, расположенных попарно по каждой из трех взаимно перпендикулярных осей, узлы ориентации чувствительного элемента в основании, датчики линейного положения чувствительного элемента по каждой оси, датчики углового положения чувствительного элемента относительно каждой оси, два силовых преобразователя магнитоэлектрического типа по каждой оси, которые выполнены с расположением действия их силы в одинаковом направлении вдоль данной оси по разные стороны от данной оси относительно друг друга и каждый из которых содержит компенсационную катушку на чувствительном элементе и магнитную систему с постоянным магнитом в узле ориентации; содержащем первый дифференциальный усилитель по каждой оси, к входу которого подключен датчик линейного положения по данной оси, второй дифференциальный усилитель по каждой оси, к входу которого подключен датчик углового положения относительно данной оси; первый и второй суммирующие усилители по каждой оси с общей линией на выходе, причем по каждой оси выходы первого и второго дифференциальных усилителей подключены к суммирующим входам первого суммирующего усилителя, к суммирующему входу второго суммирующего усилителя подключен выход одного из дифференциальных усилителей, к инверсному входу второго суммирующего усилителя подключен выход другого дифференциального усилителя, к выходу первого суммирующего усилителя подключен один вывод компенсационной катушки одного силового преобразователя, к выходу второго суммирующего усилителя подключен один вывод компенсационной катушки другого силового преобразователя из двух силовых преобразователей, размещенных по одной оси, тем, что для каждой оси введены первый, второй и третий резисторы, один вывод первого резистора подключен к второму выводу компенсационной катушки одного силового преобразователя, один вывод второго резистора подключен к второму выводу компенсационной катушки другого силового преобразователя из двух силовых преобразователей по одной оси, вторые выводы первого и второго резисторов подключены к одному выводу третьего резистора, второй вывод третьего резистора соединен с общей линией выхода суммирующих усилителей, по каждой оси датчик линейного положения и вход первого дифференциального усилителя подключены с противоположной фазой сигнала по сравнению с фазой сигнала при подключении входа второго дифференциального усилителя и датчика углового положения, компенсационные катушки выполнены с одинаковым направлением витков от начала компенсационной катушки до ее конца, по каждой оси компенсационная катушка одного силового преобразователя подключена к выходу одного суммирующего усилителя своим началом, а компенсационная катушка другого силового преобразователя подключена к выходу другого суммирующего усилителя своим концом.
В одном частном случае выполнения преобразователя инерциальной информации сопротивления R1 и R2 соответственно первого и второго резисторов выполнены на основании соотношения:
где Uамакс -максимальный выходной сигнал по напряжению преобразователя инерциальной информации на верхнем пределе диапазона измеряемых линейных ускорений;
Iм - ток первого или второго резисторов на верхнем пределе диапазона измеряемых линейных ускорений при отсутствии угловых ускорений.
В другом частном случае выполнения преобразователя инерциальной информации сопротивление R3 третьего резистора выполнено в соответствии с соотношением:
где Uεмакс - выходной сигнал по напряжению преобразователя инерциальной информации на верхнем пределе диапазона измеряемых угловых ускорений;
|I1-I2|макс - модуль максимальной разности токов I1 и I2 первого и второго резисторов на верхнем пределе диапазона измеряемых угловых ускорений.
В третьем частном случае выполнения преобразователя инерциальной информации первый и второй резисторы выполнены с равными сопротивлениями.
Путем введения первого, второго и третьего резисторов, подключения одних выводов первого и второго резисторов к компенсационным катушкам силовых преобразователей, соединения вторых выводов первого и второго резисторов с выводом третьего резистора, подключения датчиков линейного и углового положений и входов дифференциальных усилителей с противоположными фазами сигналов, подключения компенсационных катушек к выходам суммирующих усилителей по разному относительно начала и конца компенсационной катушки на выходе суммирующих усилителей по одной оси получаются сигналы противоположной полярности, ток первого резистора с выхода первого суммирующего усилителя противоположен по направлению току с выхода второго суммирующего усилителя. Поэтому суммарное напряжение на первом и втором резисторах равно сумме напряжения на первом резисторе от тока с выхода первого суммирующего усилителя и напряжения на втором резисторе от тока с выхода второго суммирующего усилителя и пропорционально линейному ускорению. Напряжение на третьем резисторе пропорционально разности токов с выходов первого и второго суммирующих усилителей и представляет собой выходной сигнал преобразователя инерциальной информации в функции от углового ускорения. Таким образом разделение сигналов линейного и углового ускорений осуществляется в самом преобразователе инерциальной информации с помощью трех введенных резисторов.
На фиг. 1 приведена конструкция преобразователя инерциальной информации.
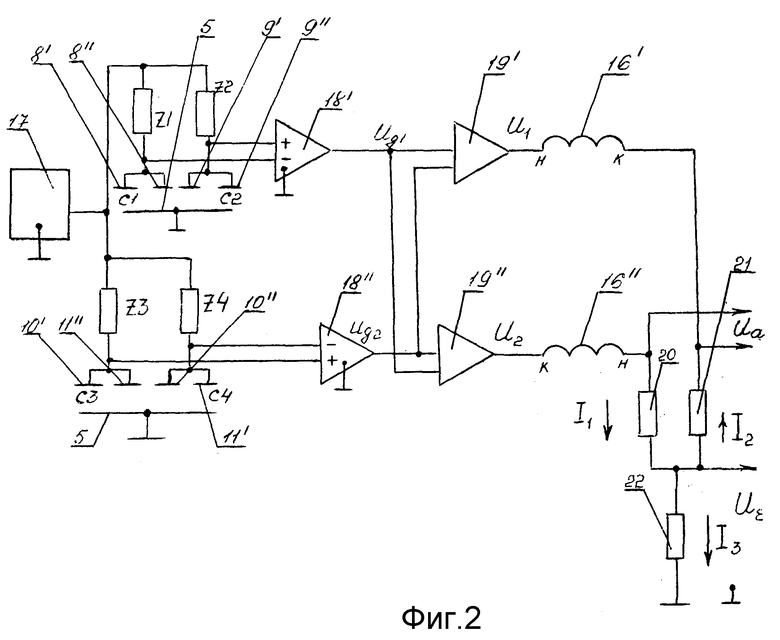
На фиг. 2 представлена электрическая схема преобразователя инерциальной информации.
В преобразователе инерциальной информации (фиг.1), имеющем состоящее из двух частей 1' и 1'' основание с осью симметрии 2-2, перпендикулярной ей осью 3-3 и третьей осью, перпендикулярной осям 2-2 и 3-3, по оси 2-2 установлены узлы ориентации 4', 4''. В основании между узлами ориентации расположен чувствительный элемент 5 из электропроводного материала, состоящий из шести одинаковых частей, две из которых 6' и 6'' расположены по оси 2-2, две по оси 3-3 и еще две по оси, перпендикулярной осям 2-2 и 3-3.
В каждом узле ориентации 4', 4''соответственно в электроизоляционных трубках 7', 7'' установлены первые электроды 8', 8'', вторые электроды 9', 9'', третьи электроды 10', 10'' и четвертые электроды 11', 11'' емкостных датчиков линейного и углового положений чувствительного элемента 5.
По оси 2-2 установлены два силовых преобразователя магнитоэлектрического типа, содержащих соответственно магнитные системы 12', 12'' с постоянными магнитами 13', 13''в узлах ориентации 4', 4'' и компенсационные катушки 14', 14''кольцевой формы на частях 6', 6'' чувствительного элемента 5.
Оси компенсационной катушки 14', постоянного магнита 13' направлены по оси 15', параллельной оси 2-2 и расположенной от нее на расстоянии l по направлению оси 3-3. Оси компенсационной катушки 14" и постоянного магнита 13'' направлены по оси 15'', параллельной оси 2-2 и расположенной от нее на расстояние l по направлению оси 3-3. Оси 15' и 15'' расположены по отношению друг к другу по разные стороны от оси 2-2.
Аналогично выполнены узлы ориентации с датчиками линейного и углового положений и силовыми преобразователями по двум другим осям. Так, например, по оси 3-3 расположены два силовых преобразователя с компенсационными катушками 16', 16'' на чувствительном элементе 5.
Компенсационные катушки 14', 14'', 16', 16'' выполнены в виде обмоток с одинаковым, например, правым, направлением витков. На чувствительном элементе 5 компенсационные катушки 14', 14'', 16', 16'' установлены так, что, например, их начала расположены одинаково относительно частей 6', 6'' и других аналогичных частей чувствительного элемента 5.
Датчик линейного положения по оси 3-3 выполнен по мостовой схеме и содержит конденсатор C1, образованный соединенными вместе электродами 8', 8'' и электропроводной поверхностью чувствительного элемента 5, а также конденсатор C2, образованный соединенными вместе электродами 9', 9'' и электропроводной поверхностью чувствительного элемента 5. В два других плеча моста включены комплексные сопротивления Z1, Z2.
Датчик углового положения относительно оси, перпендикулярной осям 2-2 и 3-3, содержит конденсатор C3, образованный соединенными вместе электродами 10', 11'' и электропроводной поверхностью чувствительного элемента 5, а также конденсатор C4, образованный соединенными вместе электродами 10'', 11' и электропроводной поверхностью чувствительного элемента 5.
В два плеча мостовой схемы датчика углового положения включены комплексные сопротивления Z3, Z4. Датчики линейного и углового положений запитываются от источника 17 переменной ЭДС.
Выход датчика линейного положения подключен к входу первого дифференциального усилителя 18', а выход датчика углового положения - к входу второго дифференциального усилителя 18''. Причем датчик линейного положения и вход первого дифференциального усилителя 18' соединены с противоположной фазой сигнала по сравнению с фазой сигнала при соединении датчика углового положения с входом второго дифференциального усилителя 18''. Выход первого дифференциального усилителя 18' подключен к суммирующим входам первого суммирующего усилителя 19' и второго суммирующего усилителя 19''. Выход второго дифференциального усилителя 18'' подключен к суммирующему входу первого суммирующего усилителя 19' и к инверсному входу второго суммирующего усилителя 19''.
К выходу первого суммирующего усилителя 19' подключено начало компенсационной катушки 16' одного силового преобразователя, расположенного по оси 3-3. К выходу второго суммирующего усилителя 19'' подключен конец обмотки компенсационной катушки 16'' второго силового преобразователя, расположенного по оси 3-3. К концу компенсационной катушки 16'' подключен один вывод первого резистора 20 с сопротивлением R1. К началу компенсационной катушки 16' подключен один вывод второго резистора 21 с сопротивлением R2. Свободные выводы резисторов 20 и 21 соединены вместе и к ним подсоединен один вывод третьего резистора 22 с сопротивлением R3. Другой вывод резистора 22 подключен к общей линии выходов суммирующих усилителей 19', 19''.
Аналогичные первый, второй и третий резисторы включены в схемы измерения линейного и углового ускорений по двум другим измерительным осям преобразователя инерциальной информации.
Преобразователь инерциальной информации работает следующим образом (фиг. 1). При наличии, например, линейного ускорения a вдоль оси 3-3 и углового ускорения ε относительно оси, перпендикулярной осям 2-2 и 3-3, на чувствительный элемент 5 действует инерционная сила F и динамический момент M:
F = ma, (1)
где m - масса чувствительного элемента 5;
M = Iε, (2)
где J - момент инерции чувствительного элемента 5 относительно оси, перпендикулярной осям 2-2 и 3-3.
Пусть направление линейного и углового ускорений таковы, что чувствительный элемент 5 поступательно перемещается по направлению к первым электродам 8', 8'' и третьим электродам 10', 10'', и происходит угловое перемещение чувствительного элемента 5, при котором часть 6' чувствительного элемента 5 приближается к первому электроду 8' и третьему электроду 10', а часть 6'' сближается со вторым электродом 9'' и четвертым электродом 11''.
Тогда емкость конденсатора C1 (фиг.2) увеличивается, емкость конденсатора C2 уменьшается, происходит разбаланс мостовой схемы датчика линейного положения относительно оси 3-3, и с ее выхода поступает сигнал на вход первого дифференциального усилителя 18', выходной сигнал Ug1 которого пропорционален линейному ускорению:
Ug1 = k1a, (3)
где k1 - коэффициент преобразования каждого из дифференциальных усилителей 18', 18''.
Одновременно увеличивается емкость конденсатора C3 и уменьшается емкость конденсатора C4, происходит разбаланс мостовой схемы датчика углового положения относительно оси, перпендикулярной осям 2-2 и 3-3. После усиления сигнала разбаланса во втором дифференциальном усилителе 18'' напряжение Ug2 на его выходе пропорционально угловому ускорению:
Ug2 = k1ε. (4)
После суммирования в первом суммирующем усилителе 19' его выходной сигнал U1 имеет вид:
U1 = k2(Ug1+Ug2) = k1k2(a+ε1), (5)
где k2 - коэффициент преобразования каждого из суммирующих усилителей 19' и 19''.
На выходе второго суммирующего усилителя 19'' вследствие инвертирования одного из его входных сигналов получается напряжение U2:
U2 = k2(Ug1-Ug2) = k1k2(a-ε). (6)
В магнитоэлектрическом силовом преобразователе при взаимодействии магнитного потока, создаваемого током компенсационной катушки, с магнитным полем постоянного магнита, электрический сигнал преобразуется в механическую силу. Поэтому при наличии на выходе первого суммирующего усилителя 19' выходного напряжения U1 посредством компенсационной катушки 16' создается компенсационная сила Fk1 одного силового преобразователя по оси 3-3:
Fk1 = KU1 = Kk1k2(a+ε), (7)
где K - коэффициент преобразования каждого силового преобразователя.
Посредством компенсационной катушки 16'' второго силового преобразователя по оси 3-3 создается компенсационная сила Fk2:
Fk2 = KU2 = Kk1k2(a-ε). (8)
Так как фазы подключения датчика линейного положения и датчика углового положения к дифференциальным усилителям 18', 18'' противоположны при одновременном изменении подключения начал и концов компенсационных катушек к суммирующим усилителям 19', 19'', то силы Fk1 и Fk2 направлены в одну сторону.
Суммарная компенсационная сила Fk двух силовых преобразователей по оси 3-3:
Fk = Fk1 + Fk2 = 2Kk1k2a. (9)
Компенсационный момент Mk вследствие неравенства сил Fk1 и Fk2 относительно оси, перпендикулярной осям 2-2 и 3-3, на плече 2l:
Mk = 2(Fk1-Fk2)l = 4Kk1k2lε. (10)
Посредством компенсационной силы Fk уравновешивается инерционная сила F, и чувствительный элемент 5 возвращается в исходное состояние по оси 3-3. Посредством компенсационного момента Mk уравновешивается динамический момент J и ограничивается поворот чувствительного элемента 5 относительно оси, перпендикулярной осям 2-2 и 3-3.
Вследствие разных фаз подключения датчиков линейного и углового положений, разного подключения начал и концов компенсационных катушек 16', 16'' полярности напряжений U1 и U2 относительно общей линии выходов суммирующих усилителей 19', 19'' различны. Поэтому различны направления токов I1 и I2 в первом резисторе 20 и втором резисторе 21 соответственно, и ток I3 в третьем резисторе 22
I3 = I1 - I2. (11)
Посредством первого 20, второго 21 и третьего 22 резисторов осуществляется разделение сигналов линейного и углового ускорений.
Суммарное напряжение Ua на первом резисторе 20 и втором резисторе 21:
Ua = I1R1 + I2R2, (12)
где R1, R2 - сопротивления первого 20 и второго 21 резисторов соответственно,
где R3 - сопротивление третьего резистора 22.

После подстановки в выражения (3), (14) выражений (5), (6), а затем выражений (13), (14) в (12) получим:
Напряжение Uε на третьем резисторе 22:
Uε = I3R3. (16)
С учетом выражения (11) соотношение (16) принимает вид
Uε = (I1-I2)R3. (17)
Путем подстановки в (13), (14) выражений (5), (16), а затем их в (17) получается:
Примем, что
R1 = R2 = R. (19)
Тогда выражение (15), (18) преобразуется к виду:
Таким образом суммарное напряжение на первом 20 и втором 21 резисторах пропорционально линейному ускорению, а напряжение на третьем резисторе 22 пропорционально угловому ускорению.
Сопротивление первого 20 и второго 21 резисторов определяются исходя из максимального выходного сигнала Uамакс на верхнем пределе измеряемых линейных ускорений, когда
I1 = I2 = Iм, (22)
где Iм - ток первого 20 и второго 21 резисторов на верхнем пределе измеряемых линейных ускорений при отсутствии угловых ускорений.
Из выражения (12) при Uа = Uамакс и условии (22)
Сопротивление третьего резистора 22 определяется исходя из максимального выходного сигнала Uεмакс на верхнем пределе измеряемых угловых ускорений при максимальной разности токов I1 и I2.
При Uε = Uεмакс из (17) получается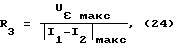
где |I1-I2|макс - модуль максимальной разности токов I1 и I2 на верхнем пределе измеряемых угловых ускорений.
Источники информации:
1. Патент Франции N 2511509, кл. G 01 P 15/125.
2. Патент РФ N 2100779, кл. G 01 C 21/12, 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1998 |
|
RU2140653C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1995 |
|
RU2100779C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199754C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2167426C1 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199755C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2096785C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2002 |
|
RU2216713C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2178569C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2137141C1 |
Преобразователь предназначен для измерения линейных и угловых ускорений. Техническим результатом изобретения является разделение сигналов линейного и углового ускорения в самом преобразователе инерциальной информации посредством простых средств. Преобразователь содержит основание, чувствительный элемент из шести частей, расположенных попарно по трем взаимно перпендикулярным осям, датчики линейного и углового ускорений, силовые преобразователи магнитоэлектрического типа с компенсационными катушками, дифференциальные и суммирующие усилители. В преобразователь введены первый, второй и третий резисторы по каждой из трех осей, причем каждый из первых и вторых резисторов подключен к одному из выводов одной из компенсационных катушек силовых преобразователей по каждой оси и к выводу третьего резистора. 3 з.п. ф-лы, 2 ил.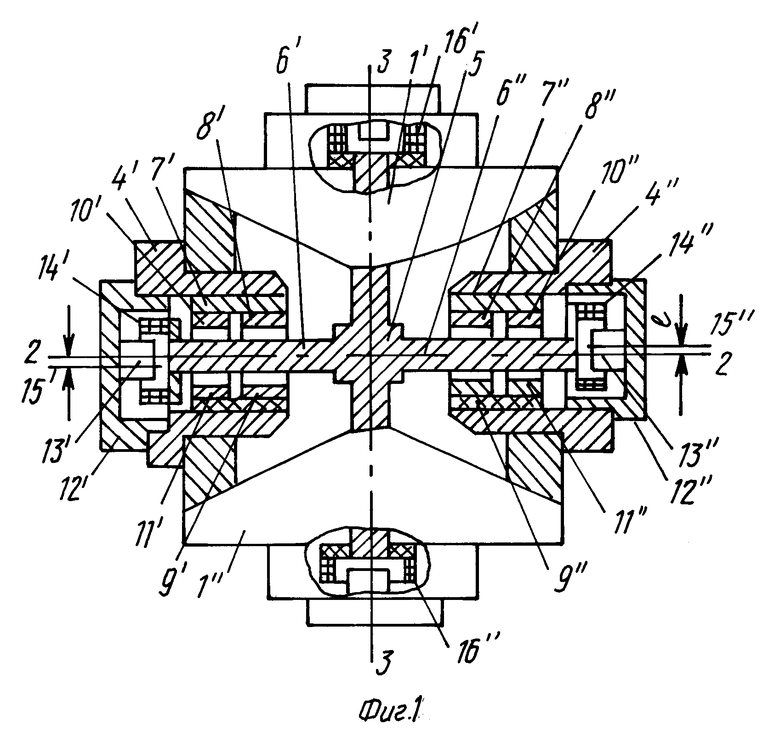
входам первого суммирующего усилителя, к суммирующему входу второго суммирующего усилителя подключен выход одного из дифференциальных усилителей, к инверсному входу второго суммирующего усилителя подключен выход другого дифференциального усилителя, к выходу первого суммирующего усилителя подключен один вывод компенсационной катушки одного силового преобразователя, к выходу второго суммирующего усилителя - один вывод компенсационной катушки другого силового преобразователя из двух силовых преобразователей, размещенных по одной оси, отличающийся тем, что для каждой оси введены первый, второй и третий резисторы, один вывод первого резистора подключен к второму выводу компенсационной катушки одного силового преобразователя, один вывод второго резистора - к второму выводу компенсационной катушки другого силового преобразователя из двух силовых преобразователей по одной оси, вторые выводы первого и второго резисторов подсоединены к одному выводу третьего резистора, второй вывод третьего резистора соединен с общей линией выхода суммирующих усилителей, по каждой оси датчик линейного положения и вход первого дифференциального усилителя подключены с противоположной фазой сигнала по сравнению с фазой сигнала при подключении входа второго дифференциального усилителя и датчика углового положения, компенсационные катушки выполнены с одинаковым направлением витков от начала компенсационной катушки до ее конца, по каждой оси компенсационная катушка одного силового преобразователя подключена к выходу одного суммирующего усилителя своим началом, а компенсационная катушка другого силового преобразователя подключена к выходу другого суммирующего усилителя своим концом.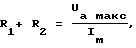
где Uамакс - максимальный выходной сигнал по напряжению преобразователя инерциальной информации на верхнем пределе диапазона измеряемых линейных ускорений;
Iм - ток первого или второго резисторов на верхнем пределе диапазона измеряемых линейных ускорений при отсутствии угловых ускорений.
где Uεмакс - выходной сигнал по напряжению преобразователя инерциальной информации на верхнем пределе диапазона измеряемых угловых ускорений;
|I1-I2|макс - модуль максимальной разности токов I1 и I2 первого и второго резисторов на верхнем пределе диапазона измеряемых угловых ускорений.
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1995 |
|
RU2100779C1 |
| US 4711125 A, 08.12.87 | |||
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "КОТЛЕТЫ ОБЖАРЕННЫЕ В ЧИЛИЙСКОМ СОУСЕ" | 2012 |
|
RU2511509C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1993 |
|
RU2046350C1 |
