Предлагаемое изобретение относится к способу пилотирования летательного аппарата, предназначенному для совершенствования состояния искусственной невесомости, а также к системе, предназначенной для реализации этого способа. Область применения упомянутых выше способа и системы соответствует области применения собственно искусственной невесомости: это, например, материаловедение, исследования жизнедеятельности в условиях невесомости, тестирование оборудования, предназначенного для использования в космической технике и т.д.
Известно, что имеется возможность искусственно создать весьма малый уровень силы тяжести внутри летательного аппарата, если заставить этот летательный аппарат двигаться по траектории свободного падения или, другими словами, выполнять полет по баллистической траектории.
На фиг. 1 схематически представлена именно такая траектория в виде графика функции Z(t). В горизонтальном полете данный летательный аппарат разгоняется. Далее он переводится в кабрирование. Затем, в верхней точке траектории, исчезает аэродинамическая подъемная сила и тяга двигателей уменьшается для компенсации лобового сопротивления. В этих условиях данный летательный аппарат описывает в соответствии с теорией траекторию в форме части эллипса, который может быть уподоблен параболе. В конце этой параболической траектории летательный аппарат выводится из пикирования.
Для исключения механических контактов оборудования, с которым должны проводиться опыты по воздействию невесомости, с кабиной данного летательного аппарата известен прием отсоединения этого оборудования от удерживающих его конструктивных элементов в кабине в момент начала параболического участка траектории полета с тем, чтобы предоставить этому оборудованию затем возможность перемещаться в свободном положении или "free floating" по англоязычной терминологии.
Для того чтобы соответствующим образом адаптировать траекторию полета данного летательного аппарата, пилоту выдается специальная информация, которая позволяет ему корректировать параметры полета таким образом, чтобы упомянутое выше экспериментальное оборудование оставалось в свободном полете в кабине данного летательного аппарата. Первое возможное техническое решение этой проблемы состоит в телевизионной съемке этого экспериментального оборудования в процессе его свободного полета и демонстрации этого изображения в реальном времени в кабине пилота. Таким образом, пилот данного летательного аппарата может в любой момент времени скорректировать траекторию полета в зависимости от мгновенного положения экспериментального оборудования.
Этот метод описан, например, в европейском патенте EP-A-0486346. В соответствии с этим методом определяется отклонение между положением контролируемой нагрузки и положением летательного аппарата, а пилотирование этого летательного аппарата осуществляется таким образом, чтобы поддерживать это отклонение на заданном уровне.
При использовании этого метода пилотирования летательного аппарата уровень микрогравитации не опускается ниже величины 10-3g, что в целом ряде случаев оказывается недостаточным. Кроме того, этот метод является неустойчивым вследствие наличия определенного запаздывания реакции летательного аппарата на управляющие воздействия со стороны пилота.
Задача данного изобретения состоят в том, чтобы устранить отмеченные выше недостатки. Для этого предлагается способ пилотирования летательного аппарата, который позволяет осуществить последовательность режимов свободного полета продолжительностью, по меньшей мере, в 10 секунд и достичь существенно лучших уровней микрогравитации, имеющих величину от 10-4 до 10-6g.
Поставленная задача решается в соответствии с предлагаемым изобретением при помощи специального выбора информации, выдаваемой пилоту в целях коррекции траектории полета летательного аппарата. Эта информация представляет собой вертикальную составляющую относительного пространственного положения экспериментального оборудования, но не мгновенную составляющую, а ожидаемую в некоторый следующий момент времени. Это упреждение, которое на практике достигает нескольких секунд, позволяет пилоту опережающие коррекции траектории полета. Таким образом преодолевается запаздывание реакции самолета на управляющие воздействия и устраняется определенная неустойчивость пилотирования.
Итак, объектом предлагаемого изобретения является способ пилотирования летательного аппарата, предназначенный для совершенствования состояния искусственной невесомости, в соответствии с которым:
данный летательный аппарат выводится на баллистическую траекторию полета;
в кабине летательного аппарата производится отсоединение оборудования, предназначенного для проведения экспериментов в состоянии невесомости;
вырабатывается специальная информация на основе пространственного положения, занимаемого этим экспериментальным оборудованием по отношению к летательному аппарату;
осуществляется коррекция траектории полета данного летательного аппарата в зависимости от упомянутой выше информации.
Предлагаемый способ отличается тем, что определяется вертикальная составляющая ожидаемого относительного положения экспериментального оборудования, причем время упреждения является определенным и может быть отрегулировано, и осуществляется коррекция траектории полета данного летательного аппарата в функции этой ожидаемой вертикальной составляющей.
В то же время, можно рассчитать вертикальную составляющую упрежденного относительного положения упомянутого экспериментального оборудования, исходя из условий отцепления или отсоединения этого оборудования и параметров полета данного летательного аппарата. Кроме того, с пользой для дела можно выработать и другую информацию, которая характеризует продольную составляющую упрежденного положения экспериментального оборудования. Можно также выработать и третий вид информации, которая характеризует поперечную составляющую упрежденного относительного положения этого оборудования.
Предлагаемое изобретение не ограничивается ручным пилотированием данного летательного аппарата. Оно также с успехом может быть применено в случае автоматического управления летательным аппаратом. При этом вычисленная информация, которая в в соответствии с данным изобретением представляет собой вертикальную составляющую упрежденного относительного положения экспериментального оборудования в кабине летательного аппарата, сравнивается с заданной величиной и разница между вычисленной информацией и этой заданной величиной представляет собой сигнал рассогласования или сигнал ошибки, который используется для автоматической корректировки управления данным летательным аппаратом.
Объектом данного изобретения является также пилотажная система, которая осуществляет практическую реализацию описанного выше способа. Эта система содержит:
средства для отсоединения или отцепления в кабине данного летательного аппарата экспериментального оборудования, предназначенного для проведения экспериментов в условиях невесомости;
средства для выработки информации специального вида, исходя из пространственного положения, занимаемого упомянутым выше оборудованием относительно данного летательного аппарата, и для индикации этой информации в кабине пилота.
Предлагаемая данным изобретением система отличается тем, что средства для выработки упомянутой выше информации способны рассчитать или вычислить вертикальную составляющую упрежденного относительного положения экспериментального оборудования, причем время упреждения является вполне определенным и поддается регулировке.
Среди использованных в приведенном выше изложении определений термин "летательный аппарат" относится ко всем типам летательных аппаратов тяжелее воздуха, в частности, ко всем типам самолетов. В приведенном ниже описании предлагаемого изобретения для упрощения изложения предлагается, что летательный аппарат представляет собой самолет, и соединяемое или отцепляемое в кабине этого самолета экспериментальное оборудование представляет собой некоторую платформу.
Фиг. 1, уже описанная выше, представляет схематическое изображение траектории полета летательного аппарата, позволяющей создать искусственным образом состояние невесомости.
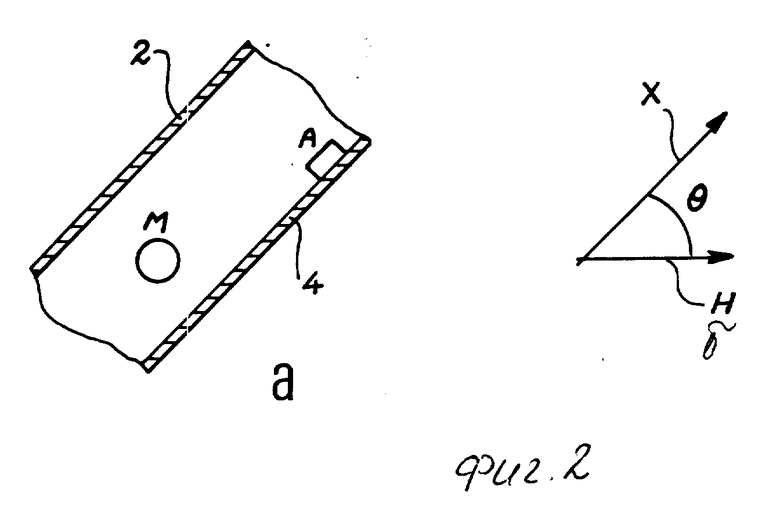
Фиг. 2 схематически определяет систему координат по отношению к данному летательному аппарату.
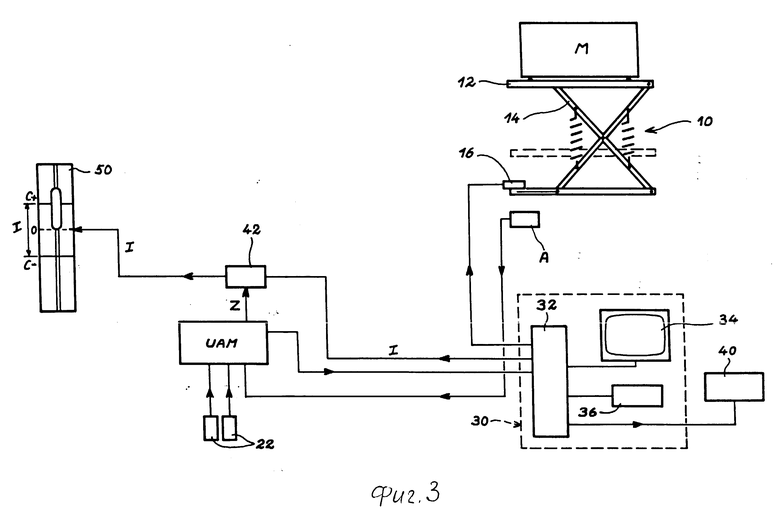
Фиг.3 показывает в схематическом виде средства практического осуществления способа в соответствии с предлагаемым изобретением.
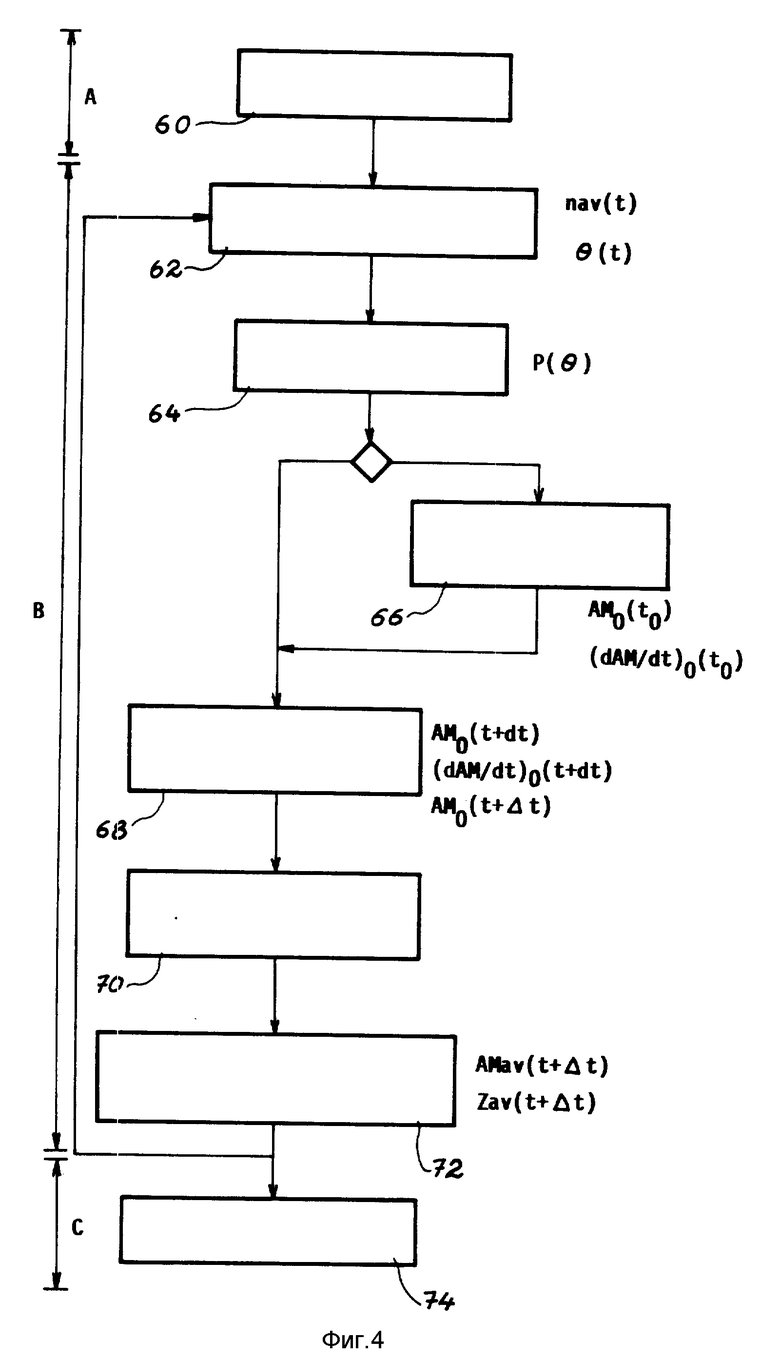
Фиг.4 демонстрирует блок-схему алгоритма вычисления, предназначенной для выдачи пилоту, информации.
На фиг. 2, в его части а, схематически представлены стенки 2 и 4 кабины данного самолета, платформа М, предполагаемая в данном случае круглой, и акселерометрическая плита А, жестко связанная со стенкой 4 кабины самолета.
В части δ фиг. 2 показана продольная ось X системы координат, которая представляет собой продольную ось данного самолета, причем эта ось составляет угол q с горизонтальной плоскостью H. Упомянутый угол q представляет собой угол тангажа данного самолета в данный момент времени.
На фиг. 3 схематически показана система, позволяющая практически осуществить способ в соответствии с предлагаемым изобретением. Эта система содержит прежде всего механическое устройство отцепления или отсоединения, обозначенное позицией 10, которое образовано панелью 12, удерживающей экспериментальную платформу М, причем две перекрещивающиеся и шарнирно связанные между собой стойки 14 позволяют регулировать первоначальное положение этой платформы М устройством выталкивания, позволяющим придать этой платформе некоторую первоначальную скорость, и блоком управления 16.
Представленная на фиг.3 система содержит также акселерометрическую плиту А (таких плит на самолете может быть установлено несколько).
Предлагаемая система, схематически показанная на фиг.3, содержит также блок смешанного сбора данных VAM, связанный в различными датчиками информации 22 (блоки гигроскопической информации, гигроскопические датчики угловой скорости и т.д.) и с акселерометрической плитой А. Эта система имеет в своем составе также вычислительное устройство 30 с блоком обработки данных 32, экраном визуализации 34 и клавиатурой 36. Блок обработки информации 32 принимает сообщение от блока смешанного сбора данных VAM. Этот блок обработки 32 содержит специальную плиту приема информации, поступающей из блока VAM, а именно: информации, относящейся непосредственно к самолету и к его пилотажным характеристикам, а также плату, осуществляющую цифроаналоговое преобразование, которая выдает информацию, вычисленную системой, в аналоговом виде, и цифровую плату управления системой отсоединения или отцепления упомянутой выше платформы. В то же время упомянутое вычислительное устройство может быть связано с принтером 40.
В качестве варианта и из соображений безопасности специально предусмотренный селектор 42 имеет два входа, соединенные соответственно с блоком смешанного сбора информации VAM, откуда этот селектор получает непосредственно сигнал ускорения Z, и с блоком обработки информации 32, откуда он снова получает величину ускорения Z, либо упреждающую информацию 1. Этот селектор 42 имеет выход, на который подается либо величина ускорения Z, либо упреждающая информация 1.
И наконец, предлагаемая система содержит устройство 50, которое индуцирует упреждающую информацию 1 (или информацию Z). Это устройство в предпочтительном варианте реализации является аналоговым и может содержать светодиодную матрицу и две стрелки указателя C+ и C-. Упреждающая информация 1 или ускорение по оси Z (поскольку речь идет об одном и том же индикаторе) появляется в виде зоны или области, высота которой указывает величину соответствующего параметра. В данном случае могут быть рассмотрены и любые другие средства визуализации.
Вполне естественно, что любые другие средства индикации упомянутых выше параметров не выходят за рамки предлагаемого изобретения. В частности, не исключается использование средства имитации или средства цифровой индикации.
Специалист в данной области техники сможет без особенных затруднений вычислить ожидаемое в некоторый последующий момент времени положение платформы М либо исходя из измерения количественных характеристик этих положений, либо на основе соответствующих вычислений. Теперь исключительно в порядке пояснения будет описан алгоритм, в соответствии с которым упомянутый выше блок обработки информации 32 имеет возможность определить упомянутую упреждающую информацию. В последующем изложении использованы следующие условные обозначения:
индекс 0 присваивается величине, рассчитанной относительно земной системы координат;
индекс av присваивается величине, рассчитанной относительно системы координат, связанной с данным самолетом;
g обозначает ускорение, D означает акселерометрическую плиту, М обозначает платформу и АМ обозначает расстояние между ними.
В том случае, когда платформа М пребывает в состоянии невесомости и находится в связи с этим в свободном полете, можно записать выражение g0(M) = g.
Кроме того, имеем γ0(A) = g + n0g при том, что n0 = P(θ)•nav, где P(θ) представляет собой матрицу перехода от связанной с самолетом системы координат к земной системе координат в функции параметра θ, который представляет собой текущий угол тангажа данного самолета, и nav представляет собой коэффициент перегрузки, выданный акселерометрической плитой А в данный момент реального времени.
Отсюда имеем: g0(M)-γ0(A) = -n0•g,
то есть: (d2(AM)/dt2)0= nоg.
Пусть X, Y и Z представляет собой координаты АМ и nx, ny и nz представляют собой координаты или составляющие n. Тогда получаем следующую систему уравнений:
Предполагая, что составляющие nxo и nzo остаются постоянными в течение шага по времени dt, можно записать:
Тогда можно записать следующее выражение:
AMav(t+dt) = p-1(θ(t+Δt))•AM0(t+Δt)
при том, что: θ(t+dt) = θ(t)+θ′(t)•dt,
где θ′ представляет собой угловую скорость вращения данного самолета в реальном времени.
Описанный выше алгоритм позволяет, таким образом, обеспечить траекторию требуемого движения платформы в кабине самолета. Однако могут быть использованы для получения этой траектории и другие подходящие алгоритмы.
Предполагая теперь, что параметры nxo, nyo. и nzo остаются постоянными в течение времени Δt, можно записать:
Тогда можно записать выражение:
AMav(t+Δt) = p-1(θ(t+Δt))•AM0(t+Δt)
где θ(t+Δt) = θ(t)+θ′(t)•Δt.
Таким образом, можно получить расчетное упрежденное относительное положение платформы. Здесь, однако, могут быть использованы и другие подходящие алгоритмы.
Упреждающая информация, направляемая пилоту данного самолета, представляет собой величину zov (t+Δt).
В качестве начальных условий принимается AM0(t0) и (d(AM)/dt)0(t0). Тогда можно записать:
AM0(t0) = P(θ(t0)). AMav(t0),
где AMav(t0) первоначальное относительное положение самолета и платформы, и:
где Vrelav(M)(t0) = P(θ(t0)). Vrelav(M)(t0)
и Vrelav (M)(t0) представляет собой скорость отбрасывания платформы, а ω0(t0) = (0,θ′(t0), 0).
И наконец, на фиг.4 представлена блок-схема алгоритма вычисления выдаваемой пилоту информации zav(t+Δt) в соответствии с только что описанным процессом.
Различные блоки на фиг. 4 имеют следующие обозначения: 60 ввод параметров с клавиатуры; 62 сбор параметров (VAM); 64 вычисление матрицы перехода; 66 вычисление начальных условий/земная система координат; 68 - вычисление реальных положений и упреждений/земная система координат; 70 - вычисление упрежденного положения/связанная с самолетом система координат и информации; 72 передача вычисленной информации, визуализация параметров, регистрация параметров; 74 запоминание параметров для хранения.
Фаза А предшествует полету данного самолета по параболической траектории, фаза В соответствует его полету по этой параболической траектории, фаза С следует за завершением полета по параболической траектории.
В приведенном выше описании подразумевается, что различные данные передаются традиционным способом в виде электрических сигналов, циркулирующих в обычных электрических проводниках. Однако использование для передачи информации и данных тех или иных беспроводных средств передачи, таких, например, как: передача по радиоканалу, передача с помощью инфракрасных лучей и т.д. применяемых, в частности, для передачи информации между платформой и блоком обработки этой информации, не будет выходить за рамки предлагаемого изобретения. Путем оборудования такими беспроводными средствами передачи информации собственно платформы появляется возможность непосредственно получить информацию о ее ускорении. Таким образом можно существенно улучшить точность выдерживания требуемой траектории полета данного самолета.
Для совершенствования состояния искусственной невесомости можно также определять величину перегрузки nav с упреждением, которое может составлять несколько секунд, в зависимости от управляющих сигналов, выдаваемых на руль высоты, с учетом времени запаздывания реакции самолета на управляющие воздействия.
В соответствии с предлагаемым изобретением можно также снабдить данную систему средствами компенсации первоначальной скорости вращения данной платформы.
И наконец, можно выдавать пилоту и любую другую информацию с тем, чтобы он имел возможность задать такую траекторию полета самолета, которая приводила бы данную платформу в некоторое заданное положение мягко и плавно.
Использование: изобретение относится к способу пилотирования летательного аппарата, предназначенному для совершенствования состояния искусственной невесомости, и системе для его реализации. Сущность изобретения: данный летательный аппарат выводится на баллистическую траекторию полета, в кабине данного летательного аппарата производится отсоединение или отцепление оборудования, предназначенного для проведения экспериментов в состоянии невесомости, вырабатывается специальная информация о пространственном положении этого экспериментального оборудования по отношению к данному летательному аппарату, осуществляется коррекция траектории полета данного летательного аппарата в зависимости от содержания этой информации, производится определение вертикальной составляющей (Zav(t+Δt)) ожидаемого или упреждающего относительного положения упомянутого экспериментального оборудования (М), причем время упреждения (Δt) является определенным и может быть отрегулировано, и осуществляется коррекция траектории полета данного летательного аппарата в функции этой ожидаемой вертикальной составляющей. 2 с. и 7 з.п.ф-лы, 4 ил.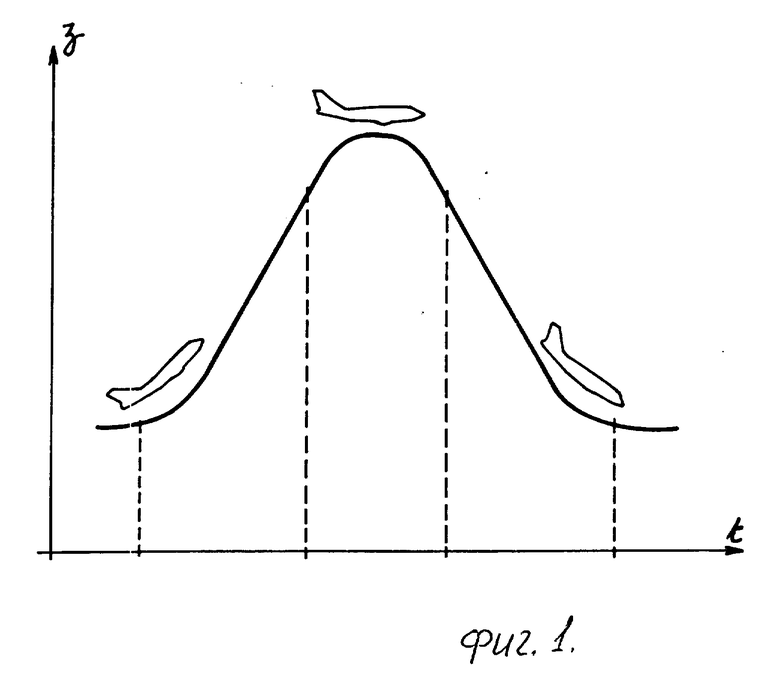
| EP, заявка N 0486346, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |

