Область техники
Изобретение относится к способу автономного снижения порогов обнаружения и отслеживания несущих сигналов, принимаемых на орбите.
Предшествующий уровень техники
Изобретение сочетает в себе три основных составляющих, а именно - приемник радиосигнала, бортовой фильтр определения параметров орбиты и процедуру понижения порога с помощью уточнения вспомогательных данных о радиальной скорости. Каждая из этих трех составляющих будет рассмотрена ниже.
Приемник может быть произвольным из числа используемых на спутниках ([1] , [2] ,[5]). Принятые сигналы могут быть переданы другими спутниками, находящимися на орбите, или из фиксированных пунктов на земной поверхности.
В качестве примеров могут быть приведены следующие типы таких приемников:
- приемники GPS, ГЛОНАСС, GNSS1, GNSS2;
- приемоответчик;
- приемник;
- узкополосный приемник DORIS.
Навигационные системы GPS и GLONASS описаны в документах [3] и [4], соответственно.
GNSS1 представляет собой размещенное на геостационарной орбите дополнение систем GPS и/или GLONASS, использующее навигационное оборудование, установленное на спутниках Инмарсат-3, GNSS2 представляет собой перспективную "гражданскую" орбитальную группировку навигационных спутников.
Узкополосный приемник DORIS используется в качестве системы глобального радиоопределения и радионавигации центром CNES (Национальный центр навигации). Сигналы, передаваемые в системе, являются узкополосными сигналами.
DORIS NG - это проект системы глобального радиоопределения и радионавигации в космосе, который основывается на использовании сигналов с расширенным спектром, передаваемых наземными радиомаяками и принимаемых спутниками на орбите.
Фильтр определения параметров орбиты создан на базе цифрового процессора, размещенного, например, в приемнике. Он использует приближенные измерения, выполненные приемником, т.е. измерения псевдоскорости относительно источника излучения радиосигнала (на земле или на орбите). Эти измерения, хотя и необязательно, могут быть дополнены измерениями псевдодальности, выполненными при помощи модуляции принимаемых несущих. Данные измерения производятся для автономного определения параметров орбиты и/или местоположения и скорости спутника-носителя. Определение данных измерений приведено в работе [5]. В качестве фильтра может быть использован:
- Калмановский фильтр [6];
- простейший фильтр с аппроксимацией по методу наименьших квадратов;
- рекурсивный фильтр с аппроксимацией по методу наименьших квадратов.
Данный фильтр также может определять следующие параметры:
V1 = D1 = радиальная скорость между спутником и i-м излучателем,
Ti = относительное временное рассогласование между стандартом времени i-го излучателя и стандартом времени приемника.
Таким образом, фильтр может оценивать псевдоскорости PVi
PVi= Vi+cΔTi,
Вышеупомянутые значения могут быть определены, даже если сигналы, приходящие от i-го излучателя, не обрабатываются приемником и установленным в нем фильтром, благодаря тому, что данные о местоположении, скорости и временных коэффициентах указанного излучателя могут быть оценены или известны заранее. Орбитальная навигационная система определяет эти псевдоскорости с точностью PV.
Орбитальная навигационная система может принимать сигналы дистанционного управления, описывающие маневры спутника-носителя. Эти маневры могут быть описаны параметрами ΔVx(t0); ΔVy(t0) и ΔVz(t0), где ΔVi представляет собой составляющие импульса скорости в момент времени t0.
Маневры спутника могут быть описаны с точностью, задаваемой параметрами δVx, δVy, δVz в трехосной системе координат. Общая точность описания маневра δV определяется как
Процедура снижения порога путем уточнения данных о радиальной скорости или радиальной псевдоскорости применимы к приемникам, имеющим одно или несколько колец фазовой автоподстройки. Считается, что эти кольца автоподстройки создаются на основе цифровых технологий.
В случае, когда сигнал принят с соотношением сигнал/шум С/No ниже порога обнаружения или синхронизации, необходимого в режиме слежения, на опорный генератор кольца автоподстройки с цифровым управлением подаются управляющие сигналы, содержащие внешние данные, полученные на основе предсказания радиальной скорости или псевдоскорости. Обычное обнаружение в режиме слежения проиллюстрировано в работе [1].
Эти предсказанные значения скорости должны быть достаточно точными и поступать от датчика, расположенного отдельно от приемника. Например, такой датчик может быть инерционного типа.
Подобная процедура может быть также использована для отслеживания несущих сигналов системы GPS с низким эквивалентным соотношением С/No, принимаемых радиоприемниками системы GPS, причем радиоприемники сопряжены с инерционными устройствами и при помощи этих приемников скорость поддерживается с высокой точностью.
Изобретение относится к способу автономного понижения порогов обнаружения и отслеживания несущих сигналов, принимаемых на орбите.
Краткое изложение сущности изобретения
Изобретение относится к способу автономного понижения порогов обнаружения и отслеживания несущих сигналов, принимаемых на орбите приемником, связанным с интегрированной орбитальной навигационной системой, находящейся внутри или вне указанного приемника, характеризующегося тем, что приемник имеет кольцо фазовой автоподстройки, обеспечивающее обнаружение и/или слежение за несущей сигнала, "подталкиваемое" вспомогательными данными о скорости и устраняющее разницу между реальной и вычисленной псевдоскоростями, причем поиск доплеровского сдвига принимаемой несущей осуществляется в окрестности предсказанного значения частоты, полученного при помощи уточненных вспомогательных данных о скорости, поступающих с навигационной системы.
Способ согласно изобретению включает следующие этапы:
на приемник подают вспомогательные данные, необходимые для обнаружения с обычными вспомогательными данными, благодаря чему приемник фиксирует все сигналы, отношение С/No которых таково, что C/No > (C/No)a, где (C/No)a - порог обнаружения несущей в режиме ее обнаружения с обычными вспомогательными данными;
пороги несущих снижают до значений (C/No)avf, где (С/No)avf - порог обнаружения несущих в режиме обнаружения, в котором используются вспомогательные данные о скорости, поступающие от орбитальной навигационной системы.
Указанный способ может иметь предварительный этап, на котором при включении приемника отсутствуют всякие внешние или внутренние вспомогательные данные и осуществляется обнаружение сигналов с отношением С/No таким, что С/No>(С/No)na где (C/No)na - порог обнаружения в режиме отсутствия вспомогательных данных. В этом случае приемник работает полностью автономно.
При проведении маневров для коррекции орбиты спутника, орбитальная навигационная система получает описание указанных маневров и соответствующим образом обновляет вспомогательные данные о скорости, поступающие с навигационной системы. Для того, чтобы при осуществлении такого маневра можно было обнаруживать несущие, принимаемые с низким соотношением С/No, в первую очередь должно быть выполнено следующее условие:
(δPV+δV)<B/fi•C,
где δPV - неопределенность предсказания псевдоскорости, получаемой от навигационной системы при отсутствии маневра.
δV - точность описания маневра,
В - анализируемая полоса частот,
fi - несущая частота сигнала, передаваемого i-м излучателем,
С - скорость света.
Если модулированная информацией несущая отслеживается с соотношением С/No таким, что (С/Nо)avf < С/No < (C/No)a и демодуляция этой информации невозможна, то информация о характеристических параметрах излучателей может быть передана на приемник с помощью сигналов внешнего дистанционного управления.
Предложенный в изобретении способ заключается в понижении порогов обнаружения и отслеживания несущих частот приемниками, устанавливаемыми на спутниках, оснащенных бортовым фильтром определения параметров орбиты. В соответствии с изобретением это снижение порога обеспечивается в автономном режиме бортовыми приемниками. Указанное снижение порога может оказаться достаточно существенным.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием конкретных вариантов воплощения со ссылками на сопровождающие чертежи, на которых:
фиг. 1 иллюстрирует структурную схему приемника со сниженным порогом за счет использования внешних вспомогательных точных данных о скорости, согласно изобретению;
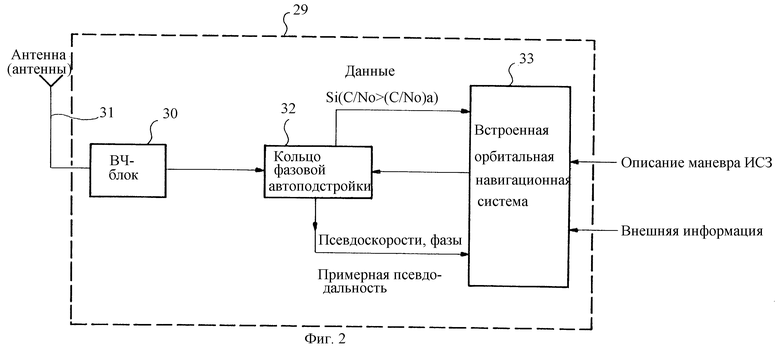
фиг. 2 иллюстрирует структурную схему приемника со встроенным прибором, согласно изобретению;
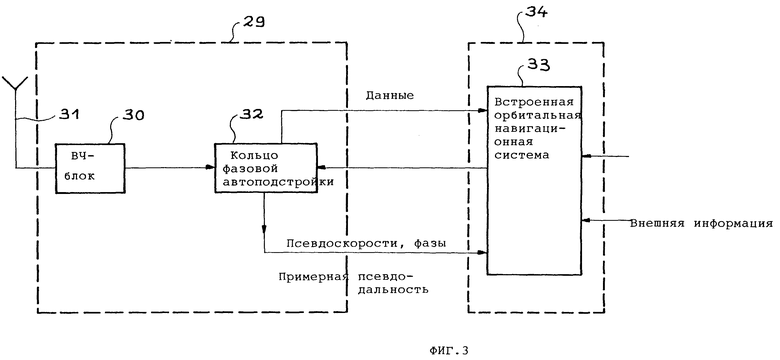
фиг.3 иллюстрирует один из вариантов воплощения изобретения;
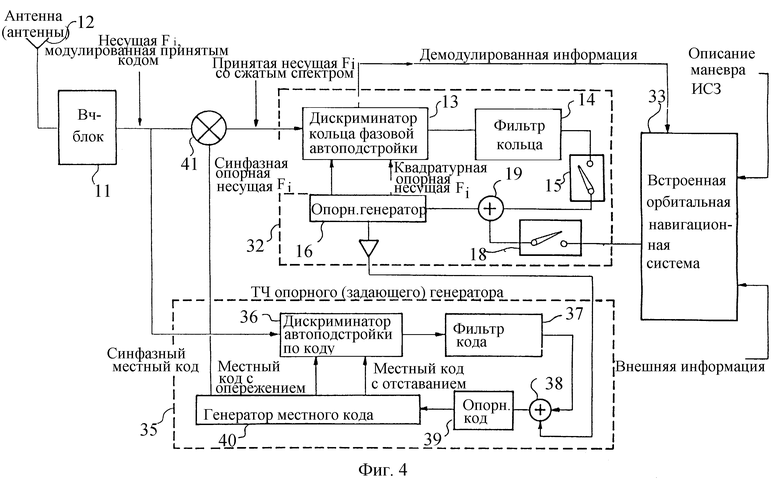
фиг. 4 иллюстрирует применение изобретения для приемника сигналов с расширенным спектром, согласно изобретению.
Описание предпочтительных вариантов реализации изобретения
На фиг.1 приведен приемник сигналов с расширенным спектром, имеющий порог, пониженный за счет использования внешних вспомогательных точных данных о скорости. Показаны только основные элементы схемы цифровой обработки.
Приемник 10 включает высокочастотный блок 11, подключенный по меньшей мере к одной антенне 12, сигнал с выхода которой поступает на дискриминатор 13 кольца фазовой автоподстройки, которое далее включает фильтр кольца автоподстройки 14 и сумматор 15. Задающий генератор (генератор с цифровым управлением) 16 формирует синфазную составляющую местной опорной частоты Fi (а в некоторых случаях и ее квадратурную составляющую) для дискриминатора 13, причем вход генератора соединен с выходом сумматора 15. Дискриминатор 13 может содержать додетекторный фильтр. На сумматор 15 через переключатель 18 также поступают сигналы от внешнего датчика и вычислителя скорости 17, например, инерциального блока. Переключатель 18 заново включается, когда схема восстановления несущей 19 нуждается во внешних вспомогательных точных данных о скорости для обнаружения и/или отслеживания принимаемых несущих.
Отслеживание
Кольцо фазовой автоподстройки, обеспечивающее удержание несущих, "подталкивается" вспомогательными данными о скорости. Другими словами, задающий генератор указанного кольца изменяет фазу местного опорного колебания со скоростью, равной внешнему предсказанию скорости. Таким образом, "подталкивание" кольца устраняет разницу между реальной и вычисленной скоростями.
Порядок вышеупомянутого кольца должен быть соответствующим для того, чтобы задающий генератор был управляемым, что позволит проводить измерения псевдоскорости с помощью вычислителя доплеровского сдвига.
Обнаружение
Кольцо фазовой автоподстойки, обеспечивающее обнаружение несущих частот также "подталкивается" вспомогательными данными о скорости. Поиск доплеровской частоты, принятой несущей, осуществляется в окрестности предсказанного значения частоты (точной предустановки частоты с учетом доплеровского сдвига), полученного при помощи внешних данных о скорости.
Диапазон поиска частоты несущей принимаемого сигнала меньше, чем в режиме обнаружения с обычной вспомогательной информацией. Таким образом, описанные принципы работоспособны, если неопределенность предсказания доплеровского сдвига ΔFD меньше анализируемого участка частотного диапазона В.
Следовательно, неопределенность предсказания псевдоскорости δPV должна удовлетворять следующим соотношения:
ΔFD<B, то есть δPV = B/fi•C,
где С - скорость света,
fi- частота несущей сигнала, передаваемого i-м излучателем.
Таким образом, поскольку неопределенность доплеровского сдвига меньше, чем в обычных случаях, эффективное обнаружение может проводиться с более низкой скоростью сканирования, чем в обычных условиях при одинаковом времени поиска Т. Следовательно, порог обнаружения уменьшается.
Определим следующие соотношения C/No:
(C/No)na - порог захвата в режиме без вспомогательной информации;
(C/No)a - порог захвата в режиме обнаружения при обычной вспомогательной информации;
(С/No)avf - порог захвата несущих в режиме обнаружения с использованием точных вспомогательных данных о скорости. Определение порогов (C/No) и (С/No)a описано в работе [1]. Порог (C/No)avf является функцией нескольких параметров:
(C/No)avf= g(T; δPV; B).
Изобретение отличается следующими процедурами, выполняемыми в приемнике сигналов с расширенным спектром, оснащенном орбитальной навигационной системой.
Этап 1 (необязательный)
Приемник начинает работу в холодном режиме (при отсутствии внешних и внутренних вспомогательных данных). В этом случае он захватывает все сигналы с соотношением C/No так, что:
C/No ≥ (С/No)na.
Первоначально захваченные сигналы позволяют приемнику, хотя и необязательно, принять сообщения, с помощью которых приемник может определить положение и/или скорость и/или временные коэффициенты источников i, обеспечивая тем самым сходимость (convergence, подстройку) орбитальной навигационной системы при помощи первого измерения псевдоскорости и соответствующей синхронизирующей информации.
Этот первый этап необходим для полностью автономных космических аппаратов.
Этап 2
Приемник получает вспомогательные, необходимые данные для обнаружения в режиме с обычной вспомогательной информацией. Эта информация не является очень точной и может быть информацией одного из следующих типов:
1) дата и время часов приемника;
2) местоположения/скорости (или, хотя и необязательно, параметры орбиты) источников излучения;
3) местоположения/скорости или орбитальных параметров спутника-носителя.
Эти данные могут быть полностью или частично получены на этапе 1. В таком случае они находятся в приемнике (например, местоположения/скорости источников излучения могут быть переданы этими источниками). При этом сохраняется возможность автономного функционирования.
В случае, когда все или часть вышеупомянутых приблизительных вспомогательных данных поступают в приемник путем смещения внешнего дистанционного управления, функционирование уже не является полностью автономным.
В случае, когда этап 1 не выполнен, указанные вспомогательные данные обязательно находятся вне приемника.
Эти приблизительные вспомогательные данные позволяют приемнику производить захват сигналов с соотношением C/No так, что:
С/No > (С/No)a.
При этом число измерений псевдоскорости больше, чем в случае, описанном для этапа 1, так как:
(C/No)a < (С/Nо)nа.
Предполагается, что число таких измерений достаточно для обеспечения такой подстройки орбитальной навигационной системы, при которой точность определения параметров орбиты спутника-носителя окажется выше, чем на этапе 1.
Этап 3
После того, как этап 2 выполнен, считается, что точность выходных параметров орбитальной навигационной системы и характеристических параметров излучателей соответствует качеству вспомогательных данных о скорости, необходимой для дальнейшего понижения порога захвата несущих до величины (C/No)avf.
В отличие от ранее известных способов, точные вспомогательные данные о скорости поступают с орбитальной навигационной системы, встроенной в приемник.
Следовательно, точность навигационной системы может быть улучшена. Кроме того, в случае ухудшения условий прохождения сигналов от источников излучений, ухудшение точности может быть ограничено так, чтобы обеспечить выполнение условия:
(C/No)avf < (C/No)a.
Этап 4
В случае проведения маневра с целью коррекции орбиты спутника, орбитальная навигационная система получает описание указанного маневра и обновляет вспомогательные данные о скорости, выдаваемые навигационной системой.
Для гарантированного захвата псевдослучайных кодовых последовательностей, принятых при совершении маневра с низким соотношением С/No, прежде всего должно быть выполнено следующее условие:
(δPV+δV)B/f1•C,
где δPV - предсказанное навигационной системой значение псевдоскорости в отсутствии маневра, δV - точность описания маневра.
Этап 5
В случае, когда псевдослучайная последовательность отслеживается с соотношением C/No так, что:
(C/No)avf < C/No< (C/No)a
демодуляция сигнала, передаваемого излучателями, не всегда возможна.
В последнем случае обновленные значения характеристических параметров излучателей сигнала (местоположений, и/или скоростей, и/или временных коэффициентов) должны быть переданы в приемник при помощи внешнего дистанционного управления, если это необходимо. Так, например, для приемников систем GPS или ГЛОНАСС, указанными параметрами могут являться эфемериды спутников, используемых в системе.
На фиг.2 представлен приемник радиосигнала 29 для спутника, имеющего по меньшей мере один высокочастотный блок 30, принимающий сигналы с по меньшей мере одной антенны 31 и присоединенный к по меньшей мере одному кольцу фазовой автоподстройки 32. Встроенная навигационная система 33 получает из кольца автоподстройки информацию, если (C/No) > (С/No)a. Эта навигационная система обеспечивает подачу точных вспомогательных данных о скорости в кольцо фазовой автоподстройки. Встроенная орбитальная навигационная система принимает описание маневров спутника и внешние данные.
На фиг.3 показан вариант воплощения, в котором орбитальная навигационная система 33 встроена в бортовой компьютер 34, размещенный на спутнике.
На фиг.4 представлен пример воплощения, в котором приемник 29 обеспечивает обработку сигналов с расширенным спектром.
В приемнике 29 предусмотрено по меньшей мере одно кольцо фазовой автоподстройки 32 и по меньшей мере одно кольцо автоподстройки по кодовой последовательности 35. Кольцо фазовой автоподстройки содержит переключатель 19, расположенный между фильтром кольца F(р) и сумматором 15.
Кольцо автоподстройки по кодовой последовательности содержит дискриминатор 36, на вход которого подается несущая, модулированная принятыми псевдослучайными кодами, поступающими с высокочастотного блока 11. Этот дискриминатор может содержать додетекторный фильтр. Выход дискриминатора подключен к фильтру кольца автоподстройки G(P) 37. На сумматор 38 поступают выходной сигнал с фильтра 37 и опорная частота, пропорциональная скорости, формируемая задающим генератором ОС N 16. Выход указанного сумматора подсоединен к задающему генератору кода 39, который в свою очередь подключен к опорному генератору местного кода 40.
Генератор 40 с одной стороны подсоединен к коррелятору 41, подавая на него синфазную опорную кодовую последовательность, а с другой стороны - к дискриминатору 36, подавая на него опорную кодовую последовательность с опережением и опорную кодовую последовательность с задержкой. Дискриминатор 13 кольца фазовой автоподстройки подсоединен к коррелятору 41.
Кольцо автоподстройки кодовой последовательности 35 принимает точные вспомогательные данные о скорости от задающего генератора OCN 16. Переключатель 18 включается, если кольцо автоподстройки по несущей требует точных вспомогательных данных о скорости, поступающих от встроенной орбитальной навигационной системы 33, для работы в режимах отслеживания и/или захвата несущих.
Переключатель 18 остается выключенным, если выполняется условие C/No < (C/No)avf. В данном случае кольцо автоподстройки по несущей не обнаруживает и не сопровождает сигнал и переключатель 18 включается. Таким образом кольцо сопровождения подает точные вспомогательные данные о скорости от орбитальной навигационной системы 33 в кольцо автоподстройки по кодовой последовательности 35.
Варианты использования изобретения
Применение способа относится к случаям приема несущих на борту космических аппаратов при низком энергетическом балансе в радиолинии между используемыми излучателями и вышеупомянутыми спутниками. Способ в соответствии с изобретением может использоваться в следующих случаях.
С точки зрения типов приемников
Навигация с использованием приемников спутниковых навигационных систем типа GPS, ГЛОНАСС.
Навигация с использованием приемопередатчиков сигналов с расширенным спектром. Энергетические характеристики линии связи могут оказаться в начале и конце пролета зоны радиовидимости станции управления и приема телеметрии (ТМ/ТС), либо в начале и конце прохода зоны обслуживания ИСЗ-ретранслятора типа TDRSS.
Навигация с использованием узкополосного приемника DORIS.
Навигация с использованием приемника сигналов с расширенным спектром, передаваемых группой наземных радиомаяков, оснащенных антенными системами с полусферическими диаграммами направленности. Полагается, что мощность излучения указанных радиомаяков оптимизирована для приема их сигналов низкоорбитальными спутниками. Следовательно, энергетические характеристики радиолинии для спутников на геостационарной орбите, например, являются менее благоприятными.
Определение положения с помощью приемников сигналов спутниковой системы (типа GPS, ГЛОНАСС) или с использованием сигналов с расширенным спектром, передаваемых группой наземных радиомаяков (типа DORIS NG). Количество интерферометрических измерений с использованием несущих, принятых при соотношении C/No > (C/No)a, необязательно является удовлетворительным при решении задач, связанных с определением местоположения. В определенных случаях может оказаться необходимым обнаружение и/или отслеживание несущих, принятых с соотношением С/No > (С/No)avf.
Для орбит
Навигация с использованием приемников GPS или DORIS NG для некоторых геостационарных переходных орбит, например:
- обычная геостационарная переходная орбита (OTG);
- сверхсинхронная орбита (OSPS);
- подсинхронная орбита (OSBS);
- дрейфующая орбита (ODD).
Навигация может осуществляться с использованием по меньшей мере двух антенн с небольшим коэффициентом усиления, если порог захвата сигнала является низким (см. /7/).
Местоопределение с использованием приемников, расположенных на ИСЗ на высокоэллиптических орбитах типа:
- орбита "Молния";
- орбита "Тундра";
- орбита Архимеда.
При навигации с использованием приемников для навигационных спутниковых систем, расположенных на круговых орбитах с периодом обращения около 12 часов, в качестве приемных антенн применяются наземные антенны с полусферической диаграммой направленности.
Навигация с использованием приемников, расположенных на ИСЗ на низких орбитах, подсоединенных к одной или более недорогим приемным антеннам, которые не являются оптимальными, но достаточно хороши, чтобы обеспечить выполнение приемником этапа 2 в соответствии с настоящим изобретением.
Источники информации
1. "Orbital Navigation with a GPS Receiver on the HETE Spacecraft" (10N GPS, январь 1994, с. 645-656).
2. "ESA Dual-Standard S-Band Transponder: A Versatile TT&C Equipment for Communications via a Data Relay Satellite or Directly with the Ground Network" by J. L. Gerner (42 конгресс Международной федерации астронавтов, 5-11 октября 1991).
3. "Standardization Agreement: Characteristics of the global position determination system NAVSTAR (GPS)" (OTAN, STANAG 4294).
4. "GLONASS Approaches Full Operational Capability (FOC)" by P.Daly (10N GPS, сентябрь 1995).
5. "Module 6 Space Vehicle Technologies and Procedures-space location"; (Editions Cepadues).
6. "Low-Orbit Navigation Concepts" by H. James Rome (том 35, 3, 1988, с. 371-390).
7. "GPS Techniques for Navigation of Geostationary Satellites" by P. Ferrage, J. L. Issler, G. Campan and J.C.Durand (10N GPS, 12-15 сентября 1995).
8. "Applicability of GPS-Based Orbit Determination Systems to a Wide Range of HEO Missions" by J.Potti, P.Bernedo and A. Pasetti (10N GPS, 12-15 сентября 1995).
Изобретение относится к способу автономного понижения порогов обнаружения и отслеживания несущих, принятых на орбите приемником, оснащенным орбитальной навигационной системой, находящейся внутри или снаружи указанного приемника, причем последний имеет по меньшей мере одно кольцо фазовой автоподстройки. Посредством этого кольца фазовой автоподстройки обнаруживают и/или отслеживают несущую, вводят точные вспомогательные данные о скорости и устраняют ошибку между реальной скоростью и вычисленной скоростью. Поиск частоты Доплера принятой несущей осуществляют в окрестности предсказанного значения частоты, полученного при помощи точных вспомогательных данных о скорости, поступающих от орбитальной навигационной системы. Достигаемым техническим результатом является повышение точности обнаружения. 2 з.п.ф-лы, 4 ил.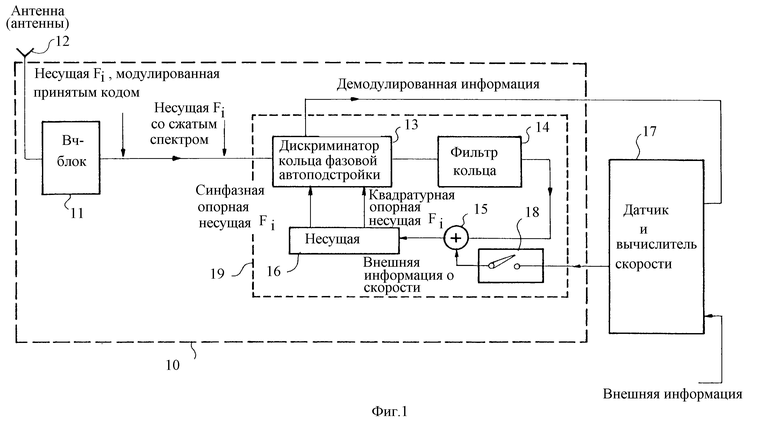
δPV<(B/fi)•C,
где δPV - погрешность предсказания вспомогательных данных псевдоскорости, выданная навигационной системой в отсутствие управления орбитой спутника;
С - скорость света;
fi - несущая частота сигнала, передаваемого i-ым источником излучения;
В - анализируемая полоса частот.
(δPV+δV)<B/fi•C,
где δV - точность маневра спутника.
| ЕР 0274958 А, 20.07.1988 | |||
| Экономайзер | 0 |
|
SU94A1 |
| Устройство для подачи продольной проволоки в машину для сварки сеток | 1973 |
|
SU544358A3 |
| ПРИЕМОИНДИКАТОР РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2027196C1 |
