Изобретение относится к способу определения разности времени между станциями в радионавигационной системе позиционирования в режиме реального времени.
Радионавигационная система позиционирования обычно включает в себя опорные станции, расположенные на земле и соединенные с вычислительным центром. Один или более спутников образуют двунаправленную линию связи между станциями. Транспортные средства наземного, воздушного, морского базирования, оборудованные соответствующими радиоэлектронными средствами, могут позиционироваться и/или наводиться в системе координат этих станций.
Например, общеизвестные системы включают Глобальную систему определения местоположения (GPS) и ее российский вариант GLONASS и предварительный план создания европейского дополнения к системе (GPS), названного CE-GPS.
В этом классе систем наземные станции обычно включают в себя генератор тактовых синхроимпульсов, обеспечивающий опорное время, и часто необходимо знать разность между опорным временем на различных станциях.
Один из известных способов состоит в использовании метода "двусторонней передачи времени". Этот метод предусматривает передачу стандартного сигнала "один импульс в секунду" (1 имп/с) от станции 1 к станции 2 через спутник-ретранслятор и, симметрично, передачу от станции 2 к станции 1. В этом случае измеряется момент времени, при котором передается конкретный импульс одной станции, и момент времени, при котором принимается импульс от другой станции. Каждая станция затем информирует другую о результатах своих измерений. Этот обмен данными осуществляется посредством любой линии связи (телефонной линии, электронной почты, диска и т.д.). Каждая станция затем может вычислить разность во времени между опорными сигналами станций, которая является простой функцией результатов измерений, выполняемых каждой станцией (обычно это полусумма).
Хотя этот способ удовлетворителен в некоторых отношениях, очевидно, что недостатком данного способа является его низкое быстродействие. Каждая станция должна ожидать приема информации от другой станции, прежде чем начать вычисления и определять соответствующую разность по отношению к другой станции. Задачей изобретения является устранение этого недостатка путем создания способа, который обеспечивает определение разности во времени между станциями в режиме реального времени.
В радионавигационных системах позиционирования используется известный способ расширения спектра, который основан на применении псевдошумовых (ПШ) кодов. Известно, что псевдошумовой код представляет собой периодическую последовательность нечетного числа битов.
Расширение спектра осуществляется путем модуляции полезного сигнала подобным псевдошумовым кодом, имеющим высокочастотный двоичный поток по сравнению с потоком данных, и затем модуляции несущей полученным сложным сигналом. Расстояние до движущихся объектов может быть измерено при использовании этого типа ПШ кодов путем определения моментов передачи и приема конкретного элемента кода относительно такового синхроимпульса приемника сигнала с расширенным спектром. Указанные моменты определяются как соответствующие началу или концу конкретного элемента кода.
Информация об этом способе расширения спектра с использованием псевдошумовых кодов в радионавигационных системах определения местоположения содержится в книге "Technigues et technologies des vehicules spatiaux". Vol 1, Cepagues Edition, 1994, в частности, в разделе 6 "Localisation spatiale", Jean-Lus ISSLER, pp. 561-634.
В таком способе известно, как синхронизировать момент времени, когда код ретранслируется геостационарным спутником, с опорным временем (системы GPS или другим опорным временем). Это осуществляется путем сдвига времени, при котором этот код передается в станции (что соответственно сдвигает время te, при котором тот же самый код принимается в указанной станции), до тех пор, пока полусумма времен передачи и приема (te+tr)/2 не будет равна опорному моменту времени tref. Это эквивалентно синхронизации времени ретрансляции со спутника с этим опорным временем.
Формула (te+tr)/2-ref= 0 может рассматриваться как корректирующее уравнение, поскольку первый член является просто дискриминатором контура распространения кода до бортового ретранслятора и к наземной станции с чистой задержкой, причем указанная задержка вызвана временем прямого и обратного прохождения сигнала между станцией и спутником и временем распространения сигнала в самой наземной станции.
Один из вариантов этого способа может быть использован если орбита спутника и, следовательно, расстояние D между станцией и спутником известно точно.
В этом случае корректирующим уравнением является (te+D)/C-tref=0, где C - скорость света. Расстояние D таково, что D=c(tr-te)/2, откуда следует, что упомянутые способы эквивалентны, когда D заменено его выражением в упомянутом выше корректирующем уравнении.
Аналогичным образом может быть получен эквивалентный вариант с использованием корректирующего уравнения (tr+D)/C-tref=0.
Данное изобретение обеспечивает возможность использования этих корректирующих способов для синхронизации модулированного сигнала, передаваемого спутником, с опорными синхроимпульсами на земле при использовании их одновременно на нескольких станциях (по меньшей мере на двух), так что разность между опорным временем двух станций определяется непосредственно на каждой из двух станций, через моменты времени, в которые приняты коды, определенные для каждой из двух станций. Поэтому нет необходимости передавать результаты измерений от одной станции к другой, так что каждая станция может сама вычислять разность между опорными моментами времени. Определение осуществляется непосредственно и без задержки.
Поэтому, более точно, изобретение относится к способу определения разности времени между несколькими станциями в радионавигационной системе определения местоположения в режиме реального времени, причем указанная система также содержит спутник, оборудованный ретранслятором, при этом способ включает следующие операции:
a) по меньшей мере один псевдошумовой код, конкретно определенный для каждой станции, формируется на соответствующей станции, причем коды, передаваемые двумя различными станциями, являются ортогональными;
b) код, конкретно определенный для каждой станции, передается от этой станции в момент времени передачи, определенный относительно опорного времени, определенного для этой станции;
с) различные коды, передаваемые разными станциями, принимаются на спутнике и ретранслируются к вышеуказанным станциям;
d) каждый код, ретранслированный спутником, принимается в каждой станции, и время приема кода, конкретно определенного для станции, определяется по отношению к опорному времени станции;
e) в каждой станции время передачи кода, конкретно определенного для этой станции, смещается до тех пор, пока полусумма времен передачи и приема кода, конкретно определенного для этой станции, не совпадает с опорным временем, определенным по отношению к опорному времени этой станции;
f) в произвольной станции измеряется время приема кода, переданного с другой станции;
g) в данной станции затем определяется разность между временем приема кода, конкретно определенного для этой станции, и временем приема кода, конкретно определенного для вышеуказанной другой станции; эта разность затем определяет разность между опорными временами, относящимися к данной станции и к другой станции, в режиме реального времени.
Краткое описание чертежей
Фиг. 1 - схематичное представление передачи и приема первого псевдошумового кода, конкретно определенного для первой станции;
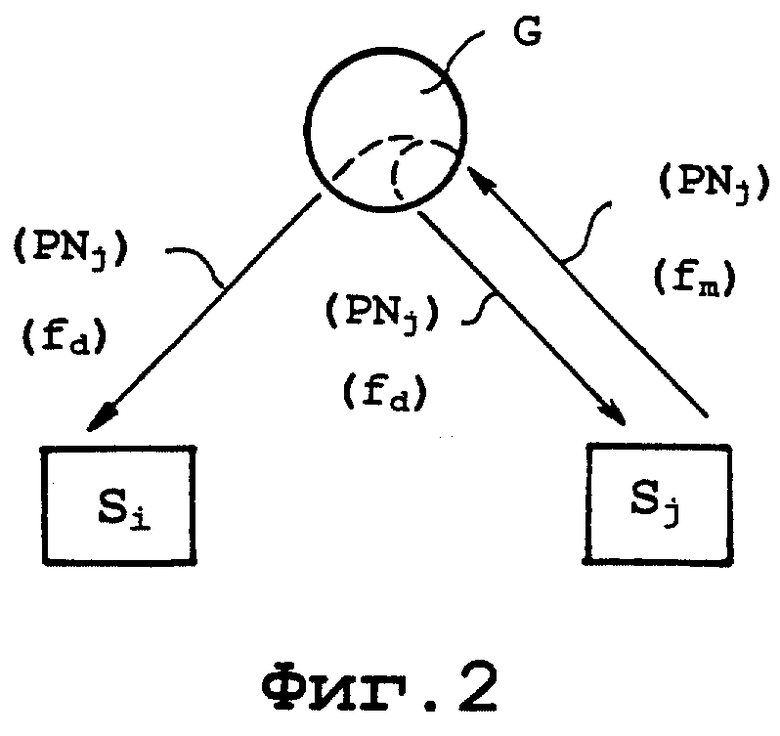
фиг. 2 - схематичное представление передачи и приема второго псевдошумового кода, конкретно определенного для второй станции;
фиг 3 - временная диаграмма, показывающая моменты времени передачи и приема кода;
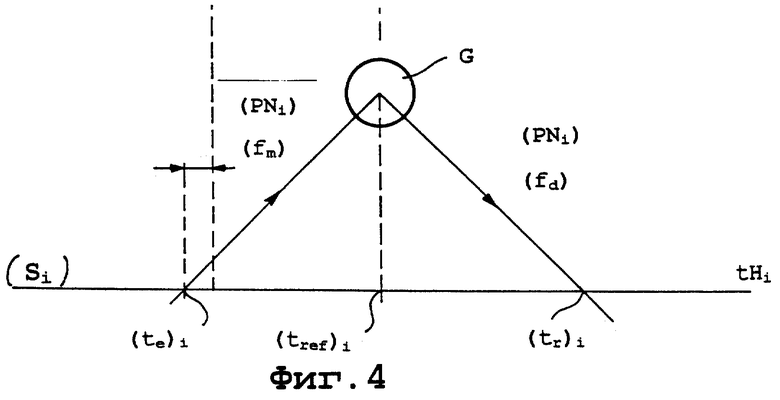
фиг. 4 - другая временная диаграмма, показывающая привязку момента времени ретрансляции на геостационарном спутнике к опорному времени;
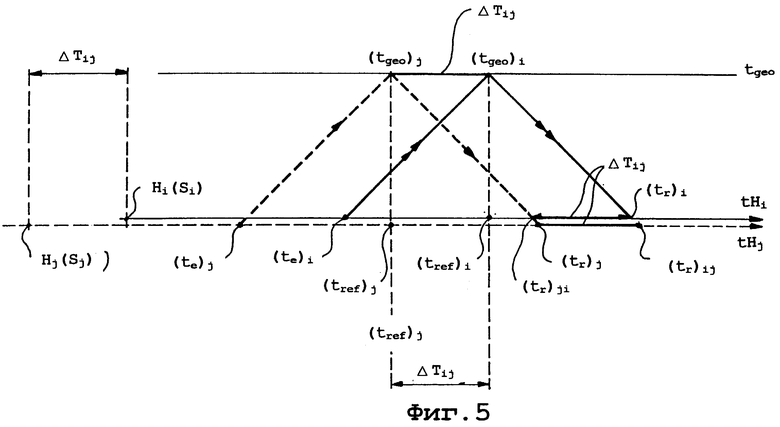
фиг. 5 - сдвоенная временная диаграмма, показывающая различные моменты времени передачи и приема кода и разность во времени между двумя станциями;
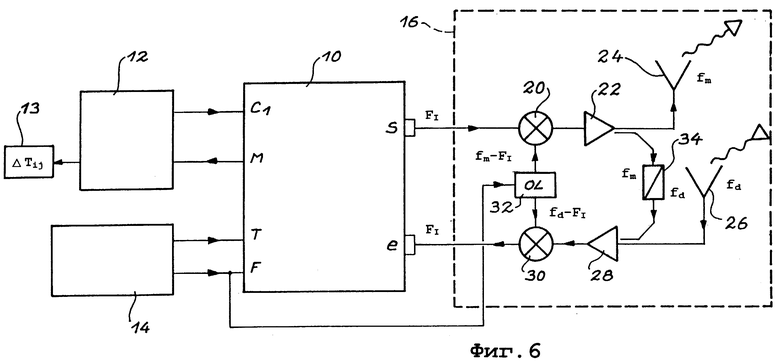
фиг. 6 - блок-схема, показывающая станцию, реализующую способ, соответствующий изобретению;
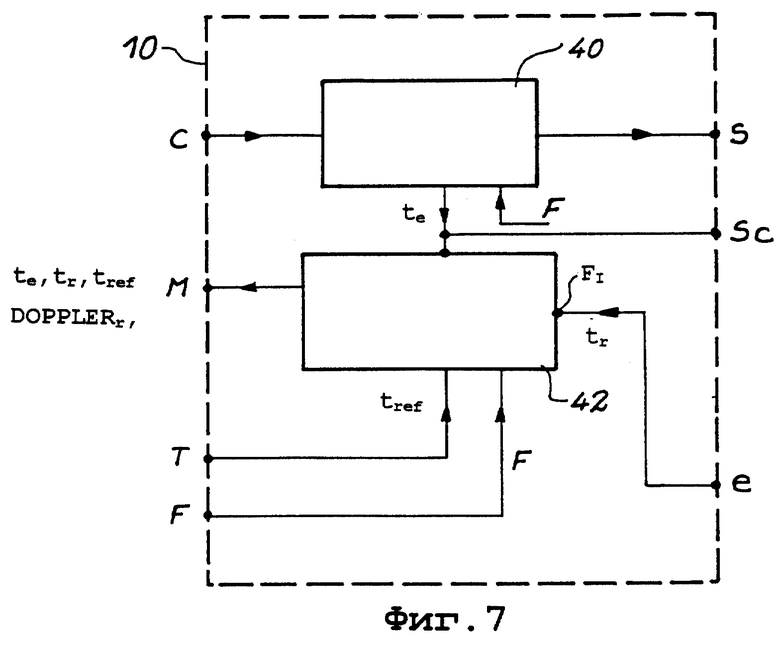
фиг. 7 - первый вариант выполнения модема;
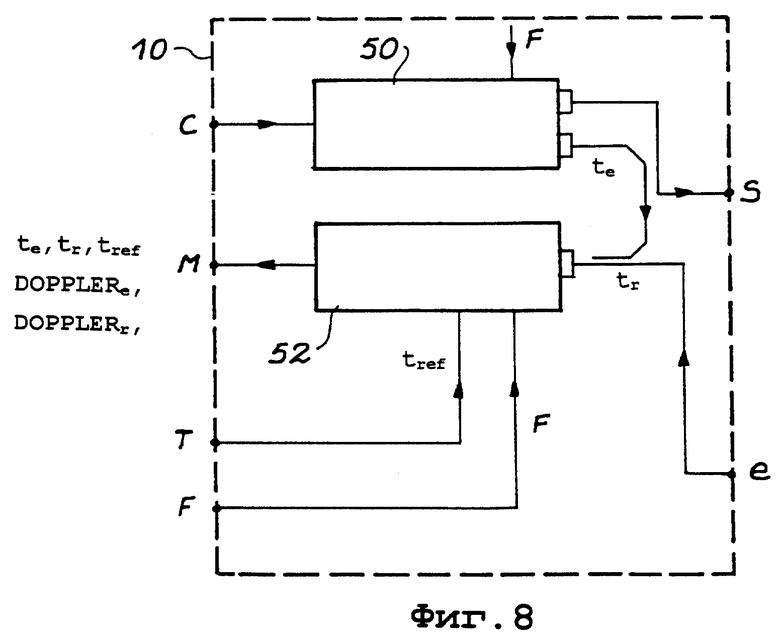
фиг. 8 - второй вариант выполнения модема;
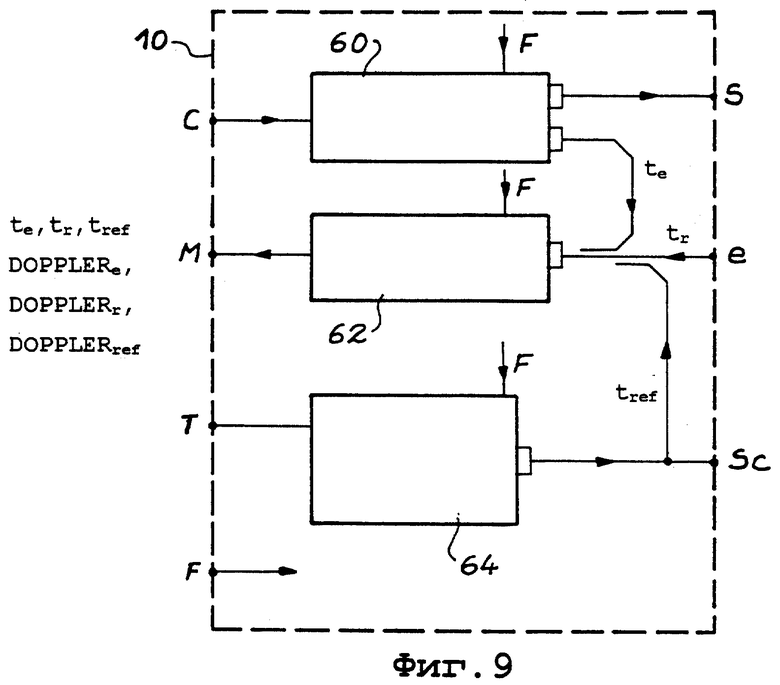
фиг. 9 - третий вариант выполнения модема;
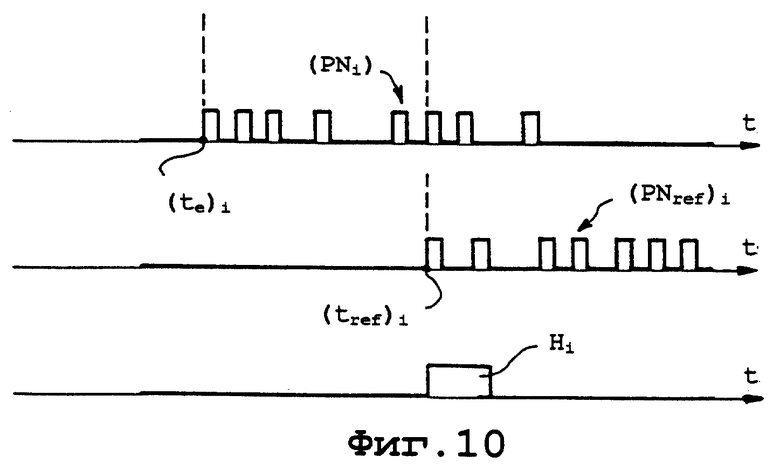
фиг. 10 - схематическая иллюстрация варианта, в котором сам сигнал опорного времени представлен в форме псевдошумового кода;
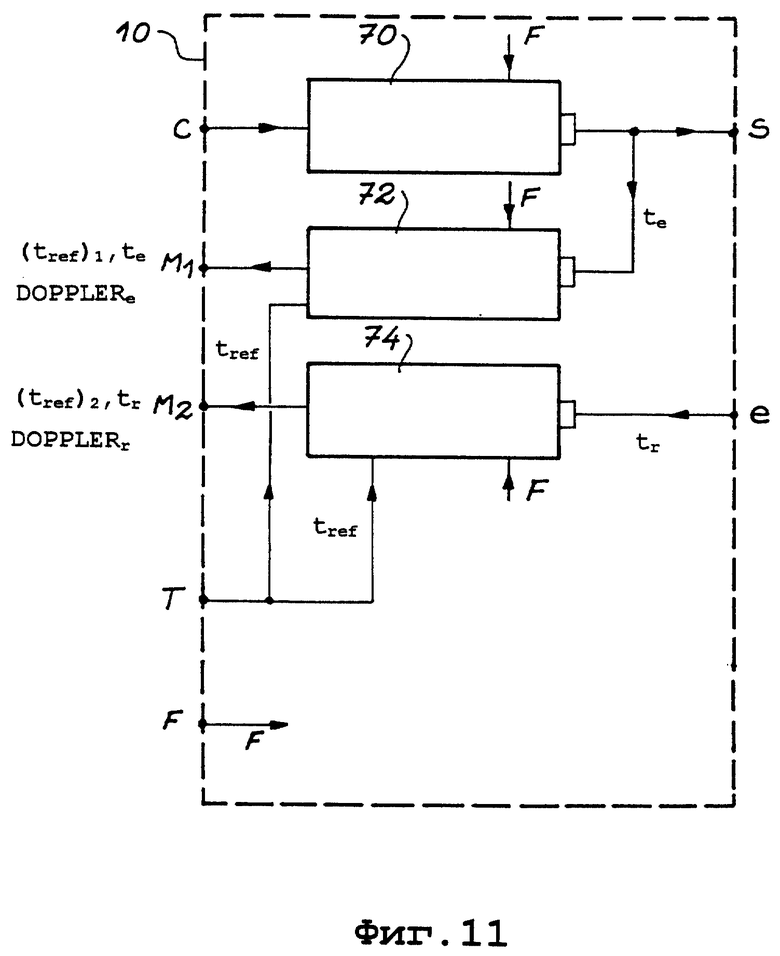
фиг. 11 - четвертый вариант выполнения модема.
Подробное описание вариантов осуществления изобретения
Фиг. 1 и 2 схематично иллюстрируют информационный обмен между станциями в радионавигационной системе определения местоположения. Не ограничивая общности, показанная система содержит две станции. Эти станции обозначены буквами S с подстрочными индексами i или j, а псевдо-шумовые коды обозначены как PN с подстрочными индексами i или j, соответствующими станции, которая их передает. Геостационарный спутник обозначен буквой G.
Произвольная станция Si передает код PNi на спутник, используя несущую с частотой fm (частотой восходящей линии связи). Спутник G принимает и ретранслирует этот код, используя несущую с частотой fd (частотой нисходящей линии связи). Код PNi возвращается на станцию Si, но он также принимается другими станциями Sj (фиг. 1).
Подобным же образом (фиг. 2) станция Sj передает несущую с частотой fm, на которой передается код PNj.
Несущая ретранслируется на частоте fd и код PNj возвращается на станцию Sj, доходит до станции Si.
Используемые коды ортогональны друг к другу, другими словами, отсутствует корреляция между кодом, переданным одной станцией Si, и кодом, переданным другой станцией Sj, если i отличается от j, так что каждая станция может отличить свой собственный код от кодов, переданных другими станциями.
На фиг. 3, 4 и 5 представлены временные диаграммы, иллюстрирующие различные моменты времени передачи и приема кода.
Во-первых, на фиг. 3 показан момент времени передачи (te)i кода PNi, переданного станцией Si. Этот момент времени помечен по отношению к сигналу опорного времени Hi. Этот сигнал опорного времени может быть получен, например, с помощью цезиевого или рубидиевого генератора синхроимпульсов или любым другим способом.
Код PNi ретранслируется геостационарным спутником G в момент времени (tgeo)i и принимается станцией Si в момент времени (tr)i.
На фиг. 4 показано, как этот процесс передачи и приема привязывается к опорному моменту времени (tref)i, всегда определяемому по отношению к сигналу опорного времени Hi. Это делается путем сдвига времени передачи (te)i кода, конкретно определенного для этой станции, до тех пор, пока полусумма [(te)i+(tr)i] /2 из времени передачи (te)i и приема (tr)i кода PNi не сравняется с опорным моментом времени (tref)i. Иными словами, время ретрансляции (tgeo)i привязано к (tref)i, поскольку (tgeo)i равно соответствующей полусумме.
Такая привязка осуществляется на каждой станции. Фиг. 5 иллюстрирует временную диаграмму передачи и приема на любой из двух станций Si, Sj. Каждое время передачи (te)i, (te)j подстраивается так, чтобы опорные времена (tref)i, (tref)j, установленные по отношению к сигналам опорного времени Hi, Hj, совпадали с полусуммой времен передачи и приема, а именно, во-первых, [(tr)i+(tr)i] /2 и, во-вторых, [(te)j+(tr)j]/2. Другими словами, времена ретрансляции спутником (tgeo)i и (tgeo)j привязаны к временам (tref)i и (tref)j.
Если сигналы опорного времени Hi и Hj сдвинуты друг относительно друга на величину ΔTij, то опорные времена (tref)i и (tref)j сдвинуты на ту же самую величину, и то же самое справедливо для времен приема на одной и той же станции (Si) кода, конкретно определенного для станции Si, и кода, конкретно определенного для другой станции Sj. Величина (tr)i-(tr)ji, измеренная в Hu, и величина (tr)j-(tr)ij, измеренная в Hj, обе непосредственно дают разность Δij между сигналами опорного времени Hi и Hj.
Следовательно, каждая станция может непосредственно измерить разность между ее сигналом опорного времени и сигналом опорного времени другой станции просто путем измерения времен приема ее собственного кода и кода, соответствующего другой станции. На фиг. 5 эта разность ΔTij показана на оси tHi, относящейся к станции Si, а также на оси tHj, относящейся к станции Sj.
Фиг. с 6 по 11 иллюстрируют некоторые варианты осуществления вышеописанного способа.
На фиг. 6 показана структурная схема станции. Она содержит модем (модулятор-демодулятор) 10 частотно-временного типа, компьютер 12 с модулем 13, отображающим разность времени, генератор синхроимпульсов 14 и приемопередающую установку 16.
Компьютер 12 может быть любого типа: персональный компьютер, рабочая станция и т. д. Цифровые линии связи между компьютером 12 и частотно-временным модемом 10 могут быть типа RS232 или RS422 (или другого типа). Программное обеспечение, содержащееся в компьютере, выполняет два типа функций:
- первая функция, которая предназначена для временной привязки модема, как описано выше;
- дополнительные функции, такие как измерение расстояния между модемом и геостационарным спутником.
Компьютер может быть также включен в состав частотно-временного модема.
Генератор синхроимпульсов 14 представляет собой, например, цезиевый или рубидиевый генератор. Этот генератор может быть автономным или привязанным к внешнему времени (универсальному всемирному времени UTC, времени системы GPS, времени системы GLONASS и т.д.). Генератор синхроимпульсов 14 вырабатывает сигнал опорного времени в форме периодического электрического импульса типа PPS ("один импульс в секунду") и боле обычного типа PPkS ("один импульс в k секунд"), а также сигнал опорной частоты в форме синусоидального или прямоугольного сигнала без ограничений. Частота этого сигнала может быть, например, 10 MHz или 5 MHz.
Модем 10 с привязкой по времени/частоте имеет четыре входа:
- цифровой управляющий вход C, подсоединенный к компьютеру;
- вход сигнала опорного времени T, связанный с генератором синхроимпульсов 14;
- вход сигнала, опорной частоты F, связанный с генератором синхроимпульсов 14;
- вход E для приема сигнала промежуточной частоты, принимаемого приемопередающей станцией (псевдошумовой код на промежуточной частоте).
Модем 10 имеет также два выхода:
- выход М, который посылает результаты измерений времени передачи te, времени приема tr и опорного времени tref в компьютер;
- выход S, который выводит сигнал промежуточной частоты, содержащий псевдошумовой код.
Используемые псевдошумовые коды могут быть общеизвестными кодами, такими как C/A-GPS, или C/A-GLONASS, или С/А-INMARSAT, или HARTLE, или P-GPS, или P-GLONASS и т.д., и т.п.
Приемопередающая установка 16 содержит смеситель 20, передающий усилитель 22, передающую антенну 24, работающую на частоте fm восходящей линии связи, приемную антенну 26, работающую на частоте fd нисходящей линии связи, принимающий усилитель 28, смеситель 30, гетеродин 32, получающий частоту, передаваемую генератором синхроимпульсов 14, и выдающий два сигнала на смесители 20 и 30 на частотах fm - F1 и fd-F1 соответственно, и частотный преобразователь 34, получающий часть передаваемого сигнала на частоте fm и вырабатывающий сигнал на частоте fd, объединяемый с принимаемым сигналом. Этот преобразователь частоты fm/fd, размещенный между двумя антеннами, используется для общей калибровки (измерение суммы времен распространения в канале передачи и в канале приема).
Передающая установка 16 работает на трех частотах:
- частота IF (F1 на фигурах), которая является промежуточной частотой сигналов, связанных с модемом. Возможными значениями для этих промежуточных частот могут быть либо стандартная частота 70 MHz, либо одна из частот сигналов L1 или L2 или в системах GPS или GLONASS, или 1575.42 MHz или 1227.60 MHz для системы GPS;
- частота fm, которая является частотой сигнала восходящей линии связи с ретранслятором на орбите, полученной после смешения с выходным сигналом модема IF;
- частота fd, которая является частотой сигнала нисходящей линии связи от ретранслятора на орбите.
Очевидно, что нет необходимости использовать смеситель 30 в приемном канале, если fd=IF.
Фиг. с 7 по 9 иллюстрирует несколько примеров архитектуры частотно/временных модемов, которые могут быть применены в изобретении.
В варианте, показанном на фиг. 7, модем 10 содержит генератор модулированного сигнала 40, работающий на промежуточной частоте IF и включенный между входом C и выходом S; приемник 42, адаптированный к модуляции, применяемой генератором 40, и включенный между входом e и выходом M. Он принимает сигнал опорного времени tref через вход T и сигнал опорной частоты через вход F, а также получает время передачи te от генератора 40. Кроме того, адаптированный приемник 42 получает принятый сигнал со входа e, который будет использоваться для определения времени приема tr, и выдает времена te, tr и tref на выход М для компьютера (вместе с информацией, относящейся к измерениям эффекта Доплера). Sc - это дополнительный выход, используемый для калибровки привязанного модема по времени Tf.
Эта схема работает следующим образом.
Генератор модулированного сигнала 40 формирует на выходе S несущую на частоте IF, модулированной периодическим псевдошумовым кодом, вместе с цифровыми данными, организованными в форме периодических кадров. Генератор также генерирует электрический сигнал te, синхронизированный с ПШ кодом на выходе S.
Приемник 42, адаптированный к псевдошумовому коду, применяемому генератором, имеет
- вход IF, обеспечивающий прием радиосигнала,
- два входа, используемые для определения внешних периодических тактов te и tref электрического сигнала.
Приемник 42 определяет специфические принимаемые такты (tr, te и tref) Модем, показанный на фиг. 8, содержит генератор 50, генерирующий два ортогональных и синхронизированных псевдошумовых кода PNi и PN'i, и приемник 52.
Приемник 52 получает один из кодов, вырабатываемых генератором 50, и код, полученный по входу e, являющемуся входом для промежуточной частоты IF. Он также получает опорный сигнал tref, используемый для определения вышеупомянутых тактов. Наконец, он также получает опорную частоту. Приемник 52 определяет времена te, tr и tref и передает эту информацию в компьютер через выход М (возможно вместе с другой информацией, например доплеровской).
Подобно модему по фиг. 8 модем по фиг. 9 содержит генератор 60 двух ПШ-кодов и приемник 62 кода. Он также содержит генератор 64 ПШ-кода, привязанный по времени к сигналу опорного времени. Этот генератор получает периодические импульсы от источника сигнала опорного времени и вырабатывает синхронизированный ПШ-код. Приемник 62 получает три сигнала: первый сигнал, синхронизированный с передаваемым кодом и фиксирующий te; второй сигнал, являющийся принятым сигналом и фиксирующий tr; третий сигнал, синхронизированный с сигналом опорного времени и фиксирующий tref. В одном из вариантов приемник 62 не имеет входа, используемого для определения тактов электрического сигнала, как показано в вариантах на фиг. 7 и 8.
В связи с вариантом по фиг. 9 на фиг. 10 схематично показаны два псевдошумовых кода, состоящих из последовательных элементов кода О или 1. Один код - это передаваемый код PNi (первая линия), другой код - это опорный код (PNref)i (вторая линия), который действует как сигнал опорного времени. Конкретный элемент этих кодов, например нарастающий фронт первого элемента, соответствует моменту времени передачи или опорному моменту времени. Третья линия показывает импульс Hi в периодическом потоке, выработанном генератором синхроимпульсов. Опорный код (PNref)i синхронизирован с этим импульсом Hi.
Модем, показанный на фиг. 11, использует генератор 70 одиночного привязанного по времени ПШ кода, но используются два приемника ПШ кодов 72 и 74 соответственно. Один приемник (72) получает передаваемый сигнал, а другой приемник (74) получает принятый сигнал. Каждый из этих приемников имеет вход, предназначенный для определения тактов tref, поступающих от источника сигнала опорного времени. Поэтому модем имеет два выхода M1 и М2 для выдачи сигнала опорного времени (tref)1, времени передачи te и, возможно, сигнала эффекта Доплера DOPPLERE в передаваемом сигнале на выходе M1; и сигнала опорного времени (tref)2, времени приема tr и сигнала эффекта Доплера DOPPLERr в принимаемом сигнале на выходе M2.
Во всех этих вариантах модемов модем может быть откалиброван путем замыкания петли с выхода S на вход e для учета задержек, вносимых различными схемами.
Вышеописанные средства могут в некоторых случаях принимать стандартные формы. Таким образом, при работе с промежуточной частотой, выбранной в соответствии с частотой сигнала L1 в GPS-системе, а именно 1575,42 MHz, и с псевдошумовым генератором типа GPS или INMARSAT C/A, генераторы промежуточной частоты ПШ кодов будут представлять собой обычные GPS-генераторы, а приемники промежуточной частоты ПШ кодов - GPS-приемники. В этом отношении следует различать две категории приемников:
- "навигационные" GPS-приемники без какого-либо внешнего входа для упомянутого определения тактов сигнала (которые соответствуют варианту, показанному на фиг. 10);
- "ориентированные во времени" GPS-приемники с внешним входом для определения тактов сигнала (которые соответствуют варианту, показанному на фиг. 8, 9, 11).
Те же самые результаты могут быть получены при использовании частоты сигнала GPS-системы (1227,60 MHz) в качестве промежуточной частоты с ПШ кодом типа GPS или INMARSAT C/A или путем получения частоты FL2 в системе GLONASS С ПШ кодом типа GLONASS C/A.
Наконец при использовании соотношения IF=fd=FL1 в GPS-системе или FL1 в GLONASS-системе не нужен смеситель 30 в приемопередающей станции (см. фиг. 6). С другой стороны, канал приема привязанного по времени модема может быть соединен с каналом для приема сигналов, передаваемых созвездием GPS-системы.
Таким образом, функции "ориентированного по времени" GPS-приемника добавлены к модему с привязкой по времени.
Наконец, очевидно, что в случае, когда архитектура приемника, использующего псевдошумовой код, такова, что высокая когерентность между кодом и несущей принимаемого сигнала промежуточной частоты необходима для выполнения корректных и постоянных измерений, необходимо в модеме с привязкой по времени использовать вторую привязку, а именно вторую привязку по несущей.
Это делается путем измерения эффекта Доплера, оказывающего воздействие на принимаемый сигнал промежуточной частоты, и определения радиальной псевдоскорости несущей Vp.
Эффект Доплера, оказывающий воздействие на принимаемый код промежуточной частоты, вычисляется для измерения tr и определения радиальной псевдоскорости кода Vc. Назначение привязки по несущей состоит в сдвиге частоты передаваемого сигнала (выход S) так, чтобы эффекты Доплера были одинаковыми (Vc= Vp).

Использование: в радионавигации при осуществлении позиционирования. В соответствии с изобретением каждая станция излучает псевдошумовой код и осуществляет привязку момента времени, при котором код станции ретранслируется спутником, к сигналу опорного времени по шкале времени этой станции. Разность между моментами времени приема станцией своего собственного сигнала опорного времени и сигнала опорного времени другой станции, ретранслированных спутником, соответствует разности во времени между станциями. Способ обеспечивает возможность определения этой разности каждой станцией без задержки в режиме реального времени. 4 з.п.ф-лы, 11 ил.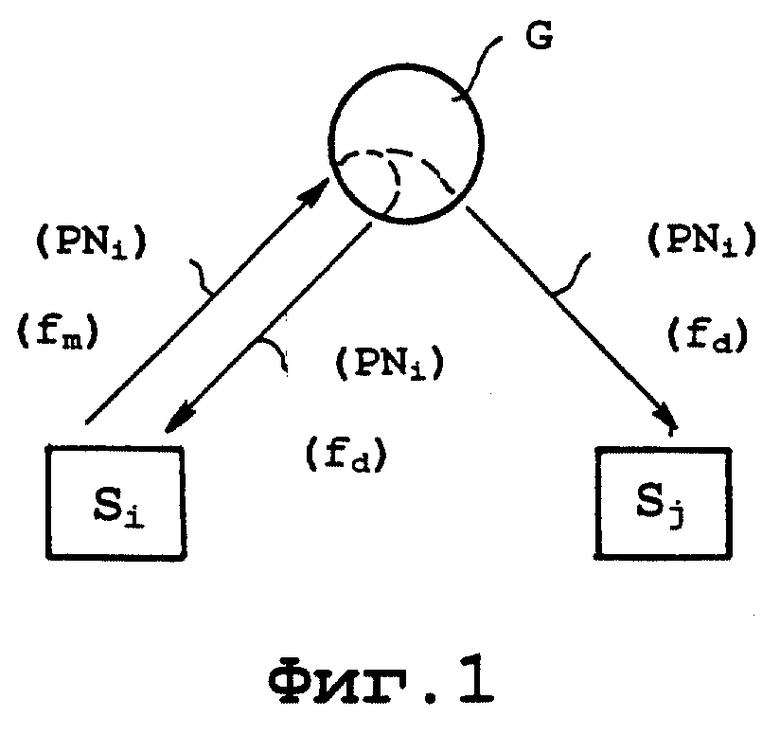
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 1993 |
|
RU2040035C1 |
| RU 2003157 C1, 15.11.1993 | |||
| ГУБАНОВ В.С | |||
| и др | |||
| Введение в радиоастрометрию | |||
| - М.: Наука, 1983, с.114-119, 217. | |||

