Изобретение относится к способу регистрации и обработки изображения картины, расположенной в заданной плоскости Р, определяемой двумя перпендикулярными направлениями x, y, причем указанное изображение получается фотографическим аппаратом, имеющим в направлении U (U x, y) плоскости Р передаточную функцию модуляции Hu(f) с частотой отсечки fcu, где f пространственная частота.
Изобретение находит преимущественное применение в области наблюдения Земли с искусственных спутников.
Наиболее близким к заявленным способу и устройству являются способ и устройство [1] Фотографическая аппаратура, описанная в статье, имеет либо элементарный детектор, изображение которого в плоскости Р пробегает картину для регистрации с помощью устройства механического сканирования, соединенного с трансляционным или вращательным движением спутника, либо линейку элементарных детекторов, например, типа соединения зарядов (ССД) с трансляционным сканированием в направлении, перпендикулярном оси указанной линейки.
Способ регистрации и обработки изображения включает первый этап регистрации изображения с частотой дискретизации fcu в направлении U, равной частоте отсечки fcu, обратная величина которой соответствует пространственному разрешению на уровне плоскости наблюдения Р. Это разрешение обычно ограничено размерами применяемого(ых) элементарного(ых) детектора(ов).
Однако вследствие того, что устройство формирования изображений фотографирующего прибора само не является идеальным, передаточная функция модуляции Ни(f) не равна 1 во всем спектре частот, что приводит к разрушению регистрируемого изображения наблюдаемой картины. Это изображение возможно обработать с применением разверточного фильтра. Если обозначить как Ри(f) и Su(f) соответствующие спектры частот в направлении наблюдаемой картины и зарегистрированного изображения, то будем иметь следующее соотношение:
Su(f) Hu(f)Pu(f).
Для восстановления Рu(f) нужно применить развертывающий фильтр Su(f), который в частотной области равен обратной передаточной функции модуляции ,
,
что выражается в пространственной области произведением: ,
,
где TF-1 обозначает обратное преобразование Фурье, а P(u) и S(u) - пространственные функции, показывающие, соответственно, картину и ее изображение.
Однако теория обработки сигналов, в частности теорема Шеннона, показывает, что лишь частоты, меньше или равные половине частоты дискретизации, могут быть восстановлены разверткой, причем это ограничение обусловлено общим явлением спектрального искажения. Кроме того, в процессе развертки высокие частоты, находящиеся в диапазоне между fеu/2 и fеu, возмущают низкие частоты, лежащие в диапазоне между 0 и fеu/2.
В статье Жакмода Ж. и др. было предложено ограничить влияние на спектральное искажение передискретизации изображения, причем частота дискретизации fеu берется равной kfсu, где k целое число, большее 1. В этом случае возможно восстановить частоты по меньшей мере до частоты отсечки fси. С другой стороны, как и за пределами fсu, передаточная функция модуляции практически равна 0, а частоты, превышающие fсu, не оказывают влияния на нижние частоты, меньшие, чем fсu.
Следовательно, имеется средство увеличить в k раз разрешение в направлении и данного фотографического прибора или по другому аспекту способа реализовать фотографический аппарат, имеющий те же характеристики по разрешению, но с меньшими габаритами, с тем чтобы фокусное расстояние устройства формирования изображения можно было разделить на k, сохраняя при этом то же самое цифровое раскрытие, а, следовательно, то же самое соотношение сигнал/шум. Последняя возможность имеет очень важное преимущество в случае рассмотренного выше пространственного применения, поскольку коэффициент k 2 обеспечит увеличение в 8 раз по объему и в 4-5 раз по массе фотографического аппарата, что позволит значительно уменьшить полезную нагрузку спутника.
Однако следует отметить, что указанные преимущества не лишены недостатков. Действительно, как в случае роста разрешения данного фотографического аппарата, так и в случае применения устройства формирования изображения с пониженным фокусным расстоянием операция развертки имеет следствием снижение отношения сигнал/шум, причем это обусловлено тем, что с учетом шумового спектра Вu(f) радиометрический сигнал Su(f) изображения записывается как:
Su(f) Hu(f)P>u(f) + Bu(f).
Применение развертывающего фильтра приводит к восстановленной картине:
Поскольку передаточная функция модуляции Нu(f) максимально равна 1, понятно, что шумовой эффект Вu(f) имеет тенденцию к росту.
Техническая задача изобретения повышение отношения сигнал/шум. Технический результат достигается тем, что в способе регистрации и обработки изображения пространственной картины, расположенной в заданной плоскости Р, определяемой двумя взаимно перпендикулярными направлениями Х и Y, причем изображения получают с помощью фотоаппарата, обладающего в направлении U (U x, y) плоскости Р передаточной функцией модуляции Hu(f) с частотой отсечки fеu, где f представляет собой пространственную частоту, первый этап способа включает регистрацию изображения с частотой дискретизации этого изображения fcu в направлении U, равной kfcu, где k целое число, большее I, второй этап способа включает обработку зарегистрированного изображения фотоаппаратом путем применения к изображению картины операции развертывания, согласно изобретению операция развертывания в частотной области и для каждого направления U выполняется путем произведения обратной величины передаточной функции модуляции Hu на подстраиваемую функцию ограничения Iu(f).
Технический результат в части способа достигается также тем, что регистрация и обработка изображения осуществляются с помощью фотоаппарата, содержащего по меньшей мере один элементарный светочувствительный детектор с частотой отсечки fcu, равной обратной величине размера ΔU изображения элементарного светочувствительного детектора в направлении U плоскости Р, и с частотой дискретизации fcu, равной k/DU.
Технический результат в части способа достигается также тем, что изображение регистрируется и обрабатывается путем сканирования изображения фотоаппаратом с одним элементарным светочувствительным детектором в двух направлениях X и Y -плоскости Р.
Изображение регистрируется и обрабатывается с помощью фотоаппарата, содержащего по меньшей мере одну линейную планку с N элементарными светочувствительными детекторами, изображения которых размещены в направлении X, причем изображение сканируется линейной планкой в направлении Y.
Технический результат в части первого варианта устройства достигается тем, что в фотоаппарат, содержащий устройство формирования изображения, выполненное в виде линзы, и линейную планку элементарных детекторов, дополнительно введено R параллельных линейных планок элементарных детекторов, причем размер элементарного детектора в направлении Х равен dx, линейные планки элементарных детекторов смещены друг относительно друга по оси X на расстояние dx/R и отделены друг от друга расстоянием R'dx/R по оси Y, где R' целое число, отличное от нуля.
Технический результат в части второго варианта устройства достигается тем, что в фотоаппарат, содержащий устройство формирования изображения, выполненное в виде линзы, и линейную планку элементарных детекторов, дополнительно введены по меньшей мере одна линейная планка элементарных детекторов и оптический делитель строки, выполненный в виде четырехгранной призмы, склеенной из двух одинаковых трехгранных призм с полупрозрачным покрытием, нанесенным на плоскость склейки. Размер элементарного детектора в направлении X равен dx, а первая и вторая планки элементарных детекторов расположены на смежных гранях оптического делителя строки и смещены друг относительно друга на расстояние dx/2 по оси X.
Таким образом, восстановленная картина имеет следующий спектр частот:
Влияние функции ограничения Iu(f) меняется в противоположных направлениях в зависимости от того, рассматривают ли качество изображения или отношение сигнал/шум. Если хотят значительно ограничить конечный шум, нужно выбирать небольшую функцию ограничения в ущерб пространственному разрешению, представляемому выражением Iu(f)Pu(f), что не очень существенно в случае данного фотографического аппарата, передискретизация которого увеличивает разрешение и снижает сигнал. С другой стороны, для аппарата с меньшими габаритами, передискретизация которого позволяет поддерживать разрешение с тем же раскрытием и, следовательно, тем же сигналом, можно выбрать большую функцию ограничения Iu(f). Очевидно, что в зависимости от рассматриваемого аппарата функция ограничения будет выбираться и согласовываться с учетом характеристик выполняемой задачи.
На фиг. 1 изображена схема фотографического аппарата для реализации способа по изобретению; на фиг. 2 типичная передаточная функция модуляции аппарата по фиг. 1; на фиг. 3 функция ограничения, применяемая в комбинации с передаточной функцией модуляции по фиг. 2; на фиг. 4: а вариант реализации передискретизации столбца для сборки линейных детекторов, b вариант реализации линейной передискретизации для планки детекторов; на фиг. 5 - первый монтаж планок детекторов, выполняющих линейную передискретизацию порядка 2; на фиг. 6 второй монтаж планок, выполняющих линейную передискретизацию порядка 2.
На фиг. 1 схематично показан фотографический аппарат 100, установленный, например, на борту искусственного спутника Земли и предназначенный для передачи изображения картины, расположенной в заданной плоскости Р, определяемой двумя взаимно перпендикулярными направлениями X, Y. В рассматриваемом применении плоскость Р соответствует поверхности Земли.
Фотографический аппарат 100 образован, с одной стороны, устройством формирования изображения, схематично показанным линзой 110, но которое может также быть зеркальным телескопом, а, с другой стороны, планкой 120 элементарных детекторов 121 типа ССД, помещенных в фокус F линзы 110. В последующем описании, не носящем ограничительный характер, элементарные детекторы 121 полагаются имеющими квадратную форму. Как это можно видеть на фиг.1 вариант сканирования плоскости Р представляет собой тип "Pushroom", в котором изображение оси X планки 120 перемещается в направлении, перпендикулярном Y, со скоростью V, равной скорости спутника относительно Земли.
Фотографический аппарат 100 имеет в каждом направлении U х, у плоскости Р передаточную функцию модуляции Hu(f), типичный ход которой показан на фиг. 2. Эта передаточная функция модуляции обнуляется для частоты отсечки fсu, соответствующей разрешению аппарата 100. Обычно разрешающая способность ограничивается прерывистой конструкцией детекторов больше, чем качеством устройства формирования изображения. Если dx представляет собой размер элементарных детекторов 121, разрешение на земле ΔU в направлении и плоскости Р определяется выражением:
где Н высота спутника;
f0 фокусное расстояние устройства формирования изображения.
В качестве примера: для спутника, орбита которого располагается в 800 км над Землей, фокальное расстояние равно 1 м, а элементарные детекторы имеют сторону в 7 мкм, достигается разрешение на Земле в 5, 6 м.
Частота отсечки fсu при этом равна:
Изображение картины наблюдения регистрируется при частоте дискретизации fсu в направлении и, равном kfсu, где k целое число, большее 1. В специальном варианте реализации, показанном на фиг. 2, коэффициент передискретизации k был принят равным 2, так что fсu равно:
После первого этапа регистрации записанное изображение Su(f) подвергается операции обработки, состоящей в приложении к нему разверточного фильтра, равного в частотной области и в каждом направлении произведению обратной передаточной функции модуляции Нu(f) на функцию ограничения Ju(f).
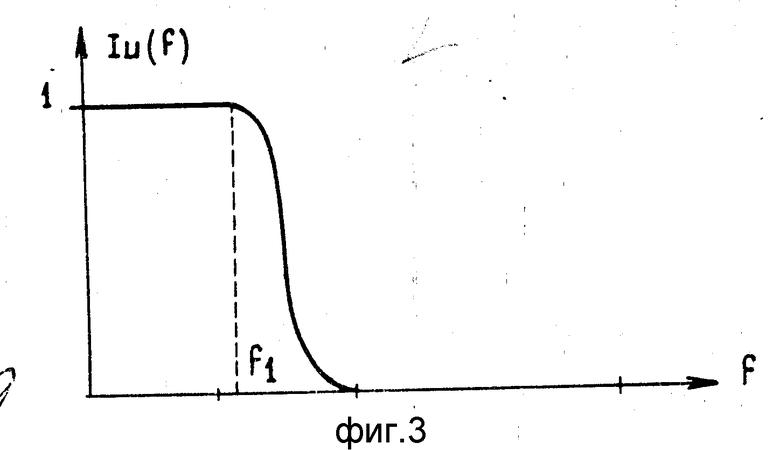
На фиг. 3 показан пример такой функции ограничения, даваемой аналитически выражением:
Эта кривая известна под названием окно Хэннинга.
Как это было пояснено выше, функция ограничения Iu(f) подстраивается таким образом, чтобы подучить, в зависимости от рассматриваемого задания, наилучший компромисс между пространственным разрешением и соотношением сигнал/шум.
Фиг. 4, а и b, показывает, соответственно, как может быть получена в случае планки типа ССД передискретизация на 2 в столбце и в строке.
Что касается передискретизации столбца /фиг. 4, а/, достаточно располагать временем опроса ТI планки, равным времени Δt, затрачиваемого спутником на прохождение на Земле расстояния Dy/2, т.е.

Для реализации передискретизации строки /фиг. 4, b/ достаточно иметь две элементарные параллельные планки с одним и тем же шагом dx, смещенными друг относительно друга на расстояние dx/2 так, чтобы изображения этих планок в плоскости Р были бы смещены на Δx/2 Du/2.
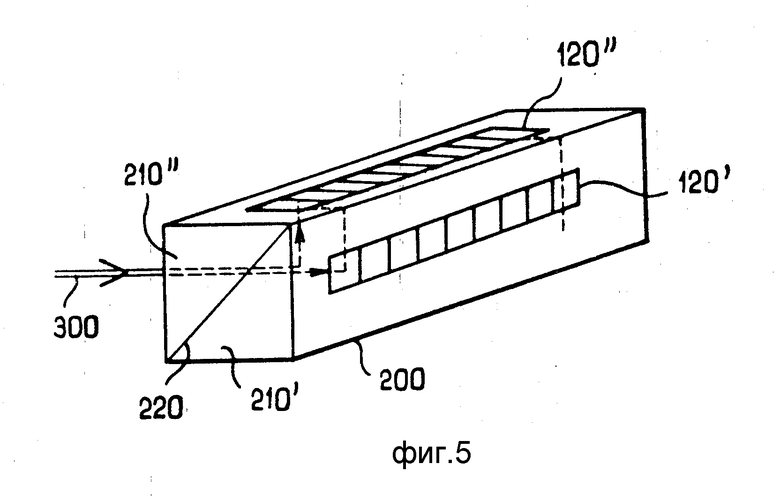
На фиг. 5 дан первый монтаж двух планок, выполняющих построчную передискретизацию порядка 2. Планки 120 и 120" установлены каждая на поверхности соответствующей призмы 210', 210", причем указанные призмы склеены таким образом, чтобы образовать оптический делитель 200 строки. Падающий поток 300 разделяется на поверхности раздела 220 двух призм, формирующих полуотражающую пластину. Каждая планка 120' и 120" получает лишь половину световой энергии, поступающей от наблюдаемой картины, откуда ограничения на соотношение сигнал/шум.
Монтаж, показанный на фиг. 6, позволяет получить передискретизацию порядка 2 с сигналом, умноженным на коэффициент 2 по отношению к предыдущему монтажу. Две планки 120' 120", смещенные на dx/2, выполнены в виде одного компонента 400 и таким образом, чтобы обеспечить синхронизацию изображений, зарегистрированных раздельно каждой планкой, причем запаздывание в регистрации одной из планок по отношению к другой должно быть равно k'Т, где k' целое ненулевое число, что требует того, чтобы расстояние a, разделяющее планки, было равно k'dx/2. В этом втором монтаже каждая строка детекторов принимает падающий интегральный световой поток, откуда удвоение сигнала по сравнению с монтажом по фиг. 5. В случае, когда фотонный шум является преобладающим, отношение сигнал/шум умножается на коэффициент, равный 
Следует также отметить, что последний монтаж может быть обобщен на случай передискретизации порядка k, превышающего 2. Достаточно расположить в одном компоненте k планок, смещенных на dx/k и отстоящих друг от друга на k'dx/k. Число k ограничивается лишь технологическими возможностями выполнения компонента с несколькими линейками.
Наконец, изобретение было описано с использованием множества элементарных детекторов, собранных в планку, но оно может быть также реализовано с одним элементарным детектором. В этом случае регистрация изображения на детекторе выполняется сканированием изображения указанным элементарным детектором в двух направлениях плоскости Р с передискретизацией на каждом сканировании.



Использование: для наблюдения Земли с искусственных спутников. Сущность изобретения: в способе регистрации и обработки пространственной картины, расположенной в заданной плоскости Р, определяемой двумя взаимно перпендикулярными направлениями Х и Y, причем изображения получают с помощью фотоаппарата, обладающего в направлении U (U = х, y) плоскости Р передаточной функцией модуляции Нu(f) с частотой отсечки fсu, где f представляет собой пространственную частоту, первый этап способа включает регистрацию изображения с частотой дискретизации этого изображения fсu в направлении U, равной kfсu, где k - целое число, большее 1, второй этап способа включает обработку зарегистрированного изображения фотоаппаратом путем применения к изображению картины операции развертывания, операция развертывания в частотной области и для каждого направления U выполняется путем произведения обратной величины передаточной функции модуляции Нu(f) на подстраиваемую функцию ограничения I и (f). Фотоаппарат 100 содержит планку 120 элементарных детекторов 121 типа ССД, помещенных в фокус линзы 110. 3 с. и 3 з.п. ф-лы, 6 ил.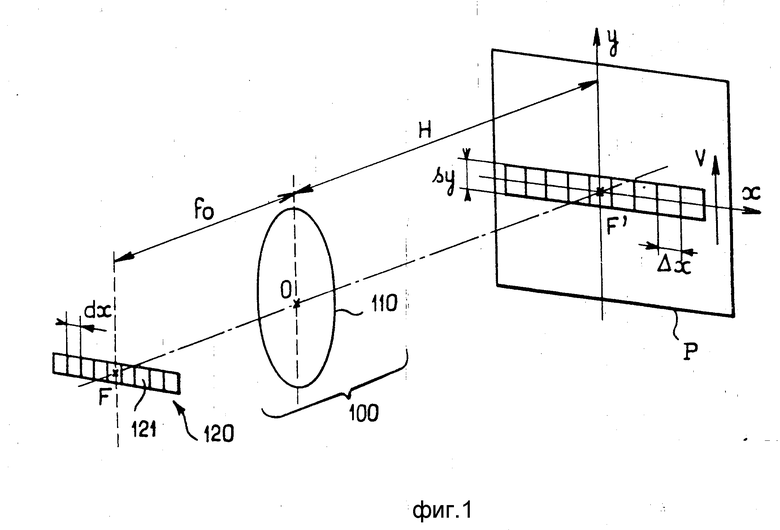
3. Способ по п.1 или 2, отличающийся тем, что изображение регистрируется и обрабатывается путем сканирования изображения фотоаппаратом с одним элементарным светочувствительным детектором в двух направлениях X и Y плоскости P.
| Жаклюда Ж | |||
| и др | |||
| Спектральное искажение, связанное с применением детекторов, образованных ячейками ССД.- Обработка сигналов т | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
