РЛС распознавания целей относится к радиолокационной технике и может быть использована для распознавания воздушных целей различных классов (типов) на всевозможных дальностях и ракурсах локации.
Известна РЛС "Микронетикс" [1] которая может быть использована для распознавания радиолокационных целей по радиолокационным дальностным портретам, получаемым за счет облучения целей импульсами очень короткой длительности (1 нс). Использование этих импульсов позволяет достичь разрешающей способности по дальности δD 15 см и, тем самым, наблюдать результаты отражения импульсов от различных элементов конструкции цели. РЛС "Микронетикс" включает эквивалент антенны, последовательно включенные высокочастотный тройник, выходной усилитель и первую антенну, последовательно соединенные магнетронный генератор, схему формирования зондирующих импульсов, элемент связи, детектор запуска и импульсный осциллограф, последовательно включенные вторую антенну, прецизионный аттенюатор, малошумящую лампу бегущий волны, усилитель мощности и детектор коротких импульсов, выход которого связан со вторым входом импульсного осциллографа. При этом второй выход элемента связи соединен со входом высокочастотного тройника, второй выход которого подключен ко входу эквивалента антенны.
Недостатком данной (и подобных ей) РЛС является то, что она позволяет определять радиолокационные характеристики целей на дальностях до единиц километров, а это в настоящее время сужает область использования таких РЛС, особенно для решения задач распознавания. Описанная РЛС в виду данного недостатка используется лишь в экспериментальных исследованиях [1] Другой недостаток РЛС "Микронетикс" необходимость двух антенн, что усложняет конструктивное исполнение. И, наконец, в условиях отсутствия точной априорной информации о сигнатурах целей определенных классов на всевозможных ракурсах, а также из-за сложности зрительной идентификации оператором эталонных и реальных сигнатур достоверность распознавания целей данной РЛС является недостаточной.
Известна также РЛС с автоматическим фильтром распознавания [2] в которой распознавание и идентификация целей могут быть осуществлены оператором путем сравнения принимаемых эхо-сигналов с эталонными радиоимпульсными портретами известных целей, то есть путем сравнения радиолокационных портретов реальной и эталонных целей. Одновременно известно, что при применении указанной РЛС можно добиться более эффективного распознавания радиолокационных целей, если вместо радиолокационных портретов оценивать сигналы, представляющие собой сумму радиоимпульсов, отраженных отдельными рассеивающими центрами (РЦ) поверхности цели.
РЛС с автоматическим фильтром распознавания включает передатчик, гетеродин, цифровое управляющее устройство (ЦУУ), последовательно соединенные антенну, антенный переключатель, усилитель высокой частоты (УВЧ), смеситель, усилитель промежуточной частоты (УПЧ), автоматический фильтр распознавания (АФР), детектор и индикатор, причем второй вход антенного переключателя связан с выходом передатчика, второй вход смесителя с выходом гетеродина, а второй вход АФР с выходом ЦУУ.
Данная РЛС использует для зондирования мощные линейно-частотно-модулированные импульсы, что позволяет распознавать цели на больших дальностях. Однако вероятность распознавания целей в такой РЛС нуждается в повышении, так как зрительно-идентификационные возможности оператора РЛС ограничены. Оператор не может держать в памяти большое количество эталонов дальностных портретов, критичных к ракурсу локации цели. В случае же распознавания по сумме сигналов, отраженных различными РЦ цели, вероятность перепутывания целей равных классов (типов) может быть еще больше, так как разное количество РЦ на поверхности равных целей, имея различные интенсивности отражения и радиальное геометрическое расположение, не исключает одинакового результирующего суммарного сигнала, определяющего класс (тип) цели. Информация о различии интенсивностей отражения у различных РЦ в данном случае, к сожалению, не используется, поскольку в типовых РЛС с ЛЧМ-сигналами перед оптимальным фильтром сжатия (местоположение которого вообще не указано в [2]) ставится ограничитель амплитуд сигналов, обеспечивающий нормальную работу фильтра и исключающий его перегрузку. Известно также [2, с. 126] что "параметры системы распознавания, а точнее автоматического фильтра распознавания определяются ожидаемой длиной цели.", то есть процесс распознавания в данном случае требует априорной информации о целях, которая в большинстве реальных ситуаций отсутствует.
Целью изобретения являются повышение достоверности автоматического распознавания радиолокационных целей в квазиоптической области отражения радиоволн за счет адаптивного учета взаимного расположения РЦ на поверхности цели в радиальном направлении.
Достижение поставленной цели обеспечивается тем, что в состав известной РЛС распознавания [2] (включающей передатчик, гетеродин, цифровое управляющее устройство, последовательно соединенные антенну, антенный переключатель, УВЧ, смеситель, УПЧ, АФР, детектор и индикатор, причем второй вход антенного переключателя связан с выходом передатчика, второй вход смесителя с выходом гетеродина, а второй вход АФР с выходом ЦУУ) дополнительно вводят систему управления антенной (СУА), систему измерения дальности (СИД), амплитудный ограничитель (АО), дисперсионную ультразвуковую линию задержки (ДУЗЛЗ), амплитудный детектор, дифференцирующую цепь (ДЦ), К аналого-цифровых преобразователей (АЦП), K-1 линий задержки (ЛЗ), запоминающее устройство (ЗУ) с управляющими входами начала и конца работы, коммутатор с управляющим входом и K каналами коммутации, инвертор кода и K-канальную схему И. При этом выход УПЧ соединяют со входом СУА, входом СИД и входом АО, выход которого подключается ко входу амплитудного детектора и входу ДУЗЛЗ, выход которой связывается со входом 1-го АЦП и входом 1-й ЛЗ, выход каждой k-й с 1-й по (К-2)-ю ЛЗ связывается со входом соответствующей (k+1)-й ЛЗ и входом соответствующего (k+1)-го АЦП, выход (K-1)-й ЛЗ соединяется со входом K-го АЦП, выход каждого k-го из K АЦП соединяется с соответствующим k-м входом ЗУ, каждый k-й из K выходов которого подключается к соответствующему k-му входу коммутатора, каждый k-й выход которого соединяется с соответствующим k-м входом схемы И и k-м выходом инвертора кода, вход которого связывается с управляющим входом коммутатора и вторым выходом ЦУУ, 1-й выход которого подключается к 1-му управляющему входу ЗУ, 3-й выход ко второму управляющему входу ЗУ, выходу схемы И и первому входу индикатора, а 4-й выход ко 2-му входу индикатора, выход амплитудного детектора соединяется со входом ДЦ, выход которой связывается со 2-м входом ЦУУ, 1-й вход которого подключается к выходу СИД, а 3-й вход ко 2-му выходу СУА, 1-й выход которой механически связывается с антенной.
Предложенное построений схемы РЛС распознавания целей позволяет существенно повысить вероятность распознавания воздушных целей за счет более качественного использования радиолокационной информации, заключенной в отраженном от цели сигнале, путем учета взаимного расположения РЦ на поверхности цели, а также за счет учета ракурса визирования цели, от которых зависит структура радиального дальностного портрета. Детальный анализ взаимного положения РЦ поверхности цели обеспечивает возможность распознавания целей до типов в пределах одного класса.
На чертеже представлена структурная схема РЛС распознавания целей.
РЛС распознавания целей включает СУА 1, антенну 2, антенный переключатель 3, УВЧ 4, смеситель 5, УПЧ 6, АО 7, передатчик 8, гетеродин 9, СИД 10, амплитудный детектор 11, ДУЗЛЗ 12, ДЦ 13, ЦУУ 15, K АЦП 16, K-1 ЛЗ 14, ЗУ 17, коммутатор 18, инвертор кода 19, схему И 20, индикатор 21. При этом антенна 2, антенный переключатель 3, УВЧ 4, смеситель 5, УПЧ 6, СИД 10 и ЦУУ 15 включены последовательно. Передатчик 8 связан со 2-м входом антенного переключателя 3, а гетеродин 9 соединен со 2-м входом смесителя 5, Выход УПЧ 6 связан также со входом СУА 1 и входом АО 7, выход которого связан со входом амплитудного детектора 11 и входом ДУЗЛЗ 12, выход которой соединен со входом 1-го АЦП 16 и входом 1-й ЛЗ 14, выход каждой k-й с 1-й по (K-2)-ю ЛЗ 14 связан со входом соответствующей (k+1)-й ЛЗ 14 и входом соответствующего (k+1)-го АЦП 16, выход (K-1)-й ЛЗ 14 подключен ко входу K-го АЦП 16, выход каждого k-го из K АЦП 16 соединен с соответствующим k-м входом ЗУ 17, каждый k-й из K выходов которого связан с соответствующим k-м входом коммутатора 18, каждый k-й выход которого подключен к соответствующему k-му входу схемы И 20 и k-му выходу инвертора кода 19, вход которого соединен с управляющим входом коммутатора 18 и 2-м выходом ЦУУ 15, 1-й выход которого подключен к 1-му управляющему входу ЗУ 17, 3-й выход ко 2-му управляющему входу ЗУ 17, выходу схемы И 20 и 1-му входу индикатора 21, а 4-й выход ко 2-му входу индикатора 21. Выход амплитудного детектора 11 связан со входом ДЦ 13, выход которой соединен со 2-м входом ЦУУ 15, 3-й вход которого подключен ко 2-му выходу СУА-1, 1-й выход которой механически связан с антенной 2.
РЛС распознавания целей работает следующим образом.
Передатчик 8 формирует импульсные ЛЧМ-сигналы, которые проходят через антенный переключатель 3 на антенну 2 и излучаются ею в направлении воздушной цели, выбранной для распознавания. Отразившись от цели, радиоимпульсы принимаются антенной 2, через антенный переключатель 3 поступают на вход УВЧ 4, где происходит их усиление. Затем усиленные радиоимпульсы поступают на 1-й вход смесителя 5, на второй вход которого подается сигнал местного гетеродина 9. В результате частота наполнения радиоимпульсов понижается до промежуточной fпр и сигнал с выхода смесителя 5 поступает для усиления в УПЧ 6, с выхода которого усиленные импульсы на промежуточной частоте следуют на входы СУА 1, СИД 10 и АО 7.
Амплитудный ограничитель 7 производит ограничение амплитуды полезного сигнала промежуточной частоты fпр до уровня, обеспечивающего нормальную работу ДУЗЛЗ 12. С выхода АО 7 ограниченный по амплитуде сигнал поступает на вход ДУЗЛЗ 12, где проводится оптимальное сжатие, а также на вход амплитудного детектора 11, выделяющего огибающую входного сигнала. На выходе ДУЗЛЗ 12 получают совокупность коротких импульсов, временная расстановка между которыми соответствует расстояниям между отдельными РЦ в радиальном направлении. Совокупность таких импульсов, характеризующая структуру и размеры цели, принято именовать радиальным дальностным портретом цели.
Для одновременного анализа наличия или отсутствия сигналов РЦ во всех дальностных интервалах отраженного от цели сигнала применяется каскад из K-1 линий задержки 14 и K АЦП 16. Число каналов K выбирается исходя из необходимости просмотра структуры наиболее крупноразмерной цели с радиальной протяженностью Lmax и величины элемента разрешения по дальности δD. Величина δD в РЛС с оптимальным сжатием сигналов в ДУЗЛЗ определяется длительностью сжатого импульса δD = cτи/2 = c/2Δf, где Δf девиация частоты ЛЧМ-сигнала, а c скорость распространения радиоволн. Следовательно, число каналов, то есть число анализируемых дальностных (временных) интервалов K, будет определяться зависимостью K = Lmax/δD = 2Lmax/cτи. К примеру, для Lmax 50 м и Δf 30 МГц получаем K 10, а для Δf 150 МГц соответственно K 50.
Пройдя каскад линий задержки, каждая из которых имеет время задержки tз, равное величине τи, дальностный портрет "расщепляется" на K составляющих, так что в момент, когда на входе 1-го АЦП будет присутствовать сигнал последнего элемента (разрешаемого участка) портрета, на выходе (K-1)-й ЛЗ будет иметь место сигнал 1-го элемента разрешения дальностного портрета. Наличие сигнала в k-м канале (на выходе k-й ЛЗ) показывает наличие локального РЦ в определенном k-м элементе дальности.
Сигнал с выхода k-й из K-1 ЛЗ 14 поступает на вход соответствующего (k+1)-го АЦП 16. На вход 1-го АЦП 16 поступает сигнал непосредственно с выхода ДУЗЛЗ 12, АЦП 16 преобразуют аналоговые сигналы в цифровую форму и подают их со своих выходов на соответствующие входы ЗУ 17. Запоминающее устройство 17 имеет два управляющих входа и представляет собой совокупность регистров типа К 555 ИР 32 [3, с.69, рис. 98] Первый управляющий вход служит для фиксации момента запоминания цифровой информации на K входах, связанных с выходами соответствующих K АЦП 16. Сигнал, разрешающий запоминание информации, формируется в ЦУУ 15 по сигналу, поступающему на 2-й вход ЦУУ 15. Для формирования последнего полезный сигнал на промежуточной частоте с выхода АО 7 подается на вход амплитудного детектора 11, где выделяются его огибающая, поступающая с выхода амплитудного детектора 11 на вход ДЦ 13. Дифференцирующая цепь 13 генерирует положительный импульс, соответствующий моменту поступления на ее вход переднего фронта видеосигнала с выхода амплитудного детектора. Положительный импульс положения переднего фронта видеосигнала цели поступает на 2-й вход ЦУУ 15, которое вырабатывает и подает в рассчитанный момент времени на 1-й управляющий вход ЗУ 17 сигнал, разрешающий запоминание информации.
Запоминание сигналов с выходов K АЦП 16 необходимо для того, чтобы в течение некоторого промежутка времени производить сравнение эталонных дальностных портретов целей различных классов (типов) со структурой портрета реальной распознаваемой цели, представленного сигналами на K выходах ЗУ 17. Для организации процесса такого сравнения на 1-й и 3-й входы ЦУУ 15 подаются соответственно сигналы с выходов СИД 10 (данный сигнал пропорционален дальности до цели) и СУА 1 (данный сигнал пропорционален угловым координатам цели). На основе координатной информации о цели и характере ее изменения во времени, в предположении, что вектор линейной скорости цели совпадает с продольной осью летательного аппарата, ЦУУ 15 выбирает из банка данных эталонные дальностные портреты целей различных классов, соответствующие вычисленному ракурсу локации, которые в виде кодовых расстановок поочередно поступают на управляющий вход коммутатора 18 (коммутатор представляет собой совокупность элементарных управляемых ключей типа схемы И [3, с. 24, рис.2]) со 2-го выхода ЦУУ 15. Сначала на управляющий вход коммутатора 18 поступают кодовые расстановки эталонных портретов целей наибольших размеров и более сложной конфигурации, и по мере отождествления с реальным портретом производится переход к дальностным эталонам менее сложных целей.
Коммутатор 18 имеет K входов и K выходов. По поступлении на управляющий вход коммутатора 18 очередной эталонной кодовой расстановки коммутатор 18 пропускает на свой k-й выход сигнал k-го входа только при наличии в кодовой расстановке на k-м месте единичного значения кода. Напротив, при наличии в эталонной расстановке из K символов на k-м месте нулевого значения кода, данный канал коммутации остается в разомкнутом состоянии и на k-м выходе коммутатора 18 сигнал будет отсутствовать. Одновременно кодовая расстановка поступает на вход инвертора кода 19, который может быть построен на K-м количестве элементарных схем НЕ [3, с. 24, рис. 1] где производится инвертирование кода на противоположный (например, расстановка 01000101 будет преобразована в 10111010). И поскольку каждый k-й выход коммутатора 18 соединен с k-м выходом инвертора кода 19, на всех закрытых (разомкнутых) выходах коммутатора 18 при определенной кодовой расстановке будет присутствовать единичное значение кода. На остальных открытых выходах коммутатора 18, соединенных с соответствующими выходами запоминающего устройства 17, наличие или отсутствие единичного значения сигнала в k-м канале будет определяться наличием или отсутствием сигнала на выходе k-го АЦП 16, то есть наличием или отсутствием РЦ в k-м элементе дальности.
Сигналы K выходов коммутатора 18 поступают на соответствующие из K входов схемы И 2О, которая вырабатывает выходной сигнал только при наличии единичного включения кода на всех K входах одновременно. Таким образом, на выходе схемы И 20 появится сигнал только в том случае, если сформированный дальностный портрет на выходах ЗУ 17 совпадает с эталонным портретом, пришедшим из ЦУУ 15, так как единичные сигналы портрета реальной цели, пройдя через коммутатор 18, заполнят недостающие входные ячейки схемы И 20 в случае, если в каких-либо скоммутированных каналах коммутатора 18 не появятся сигналы с соответствующих выходов ЗУ 17, схема И 20 не сработает и на ее выходе сигнал сформирован не будет.
Одновременно с подачей на 1-й управляющий вход ЗУ 17 очередной кодовой расстановки, определяющей структуру эталонного портрета цели 1-го класса, ЦУУ 15 подает со своего 4-го выхода на 2-й вход индикатора 21 сигнал, подготавливающий к включению информационное табло (лампа, светодиод и т.п.) наличия цели данного 1-го класса. При совпадении портрета цели с эталонным портретом схема И 2О подает на 1-й вход индикатора 21 сигнал, по приходу которого включается табло, информирующее оператора РЛС о результатах распознавания. Выходной сигнал схемы И 20 используется также для перевода ЗУ 17 в исходное (ждущее) состояние, так как он автоматически поступает на 2-й управляющий вход ЗУ 17. В случае если портрет цели не соответствует ни одному из эталонов на выбранном ракурсе, сигнал перевода ЗУ 17 в исходное состояние поступает на его 2-й управляющий вход с 3-го выхода ЦУУ 15. В этом случае цель считается нераспознанной и цикл распознавания возобновляется.
Как видно из описания предлагаемой РЛС распознавания целей, она лишена недостатков, свойственных прототипу [2] Цели, имеющие в своем составе одинаковое количество РЦ, но различную конфигурацию, то есть взаимное расположение РЦ в радиальном направлении, будут однозначно распознаваться между собой, тем более что в отличие от прототипа в данной РЛС при выборе эталонных портретов учтен ракурс локации цели, от которого существенно зависит структура эталона. Результат распознавания целей предложенной РЛС не зависит от обученности и личных качеств оператора, так как процесс распознавания полностью автоматизирован.
Таким образом, целесообразность использования предлагаемого в данном изобретении нового технического решения очевидна.
Литература
1. Небабин В.Г. Сергеев В.В. Методы и техника радиолокационного распознавания. -М. Радио и связь, 1984, с. 112 114, рис. 4.6 (аналог).
2. Небабин В.Г. Сергеев В.В. Методы и техника радиолокационного распознавания. -М. Радио и связь, 1984, с. 120 126, рис. 4.11 (прототип).
3. Цифровые аналоговые интегральные микросхемы. Справочник/ С.В.Якубовский, Л.И.Ниссельсон, В.И. Кулешова и др. Под ред. С.В.Якубовского.-М. Радио и связь, 1989, 446 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СИГНАЛОВ | 1996 |
|
RU2095826C1 |
| РАДИОЛОКАЦИОННОЕ РАСПОЗНАЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2095824C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СОСТАВА ЦЕЛИ | 1996 |
|
RU2095827C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ | 1997 |
|
RU2129286C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ ПО СТРУКТУРЕ ДАЛЬНОСТНОГО ПОРТРЕТА | 2012 |
|
RU2513041C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1996 |
|
RU2114443C1 |
| УСТРОЙСТВО ЛОГИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1998 |
|
RU2149420C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1995 |
|
RU2095822C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1996 |
|
RU2096803C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2099736C1 |
Изобретение относится к области радиолокационных измерений и может быть использовано в импульсных РЛС для распознавания воздушных объектов на разных ракурсах и дальностях. Целью изобретения является повышение достоверности автоматического распознавания радиолокационных целей в квазиоптической области отражения радиоволн за счет учета взаимного расположения отражателей на поверхности цели в радиальном направлении. Для этого в состав известного устройства вводят дополнительно систему управления антенной, систему измерения дальности, амплитудный ограничитель, дисперсионную ультразвуковую линию задержки, амплитудный детектор, дифференцирующую цепь, K аналого-цифровых преобразователей, K-1 линий задержки, запоминающее устройство с управляющими входами начала и конца работы, коммутатор с управляющим входом и K каналами коммутации, инвертор кода, K-канальную схему И, изменяя соответствующим образом межблочные связи. Это позволяет повысить достоверность распознавания воздушных целей за счет более качественного использования информации, заключенной в отраженном от цели сигнале, путем учета взаимного расположения отражателей на поверхности цели и ракурса визирования цели, от которых зависит структура дальностного портрета. 1 ил.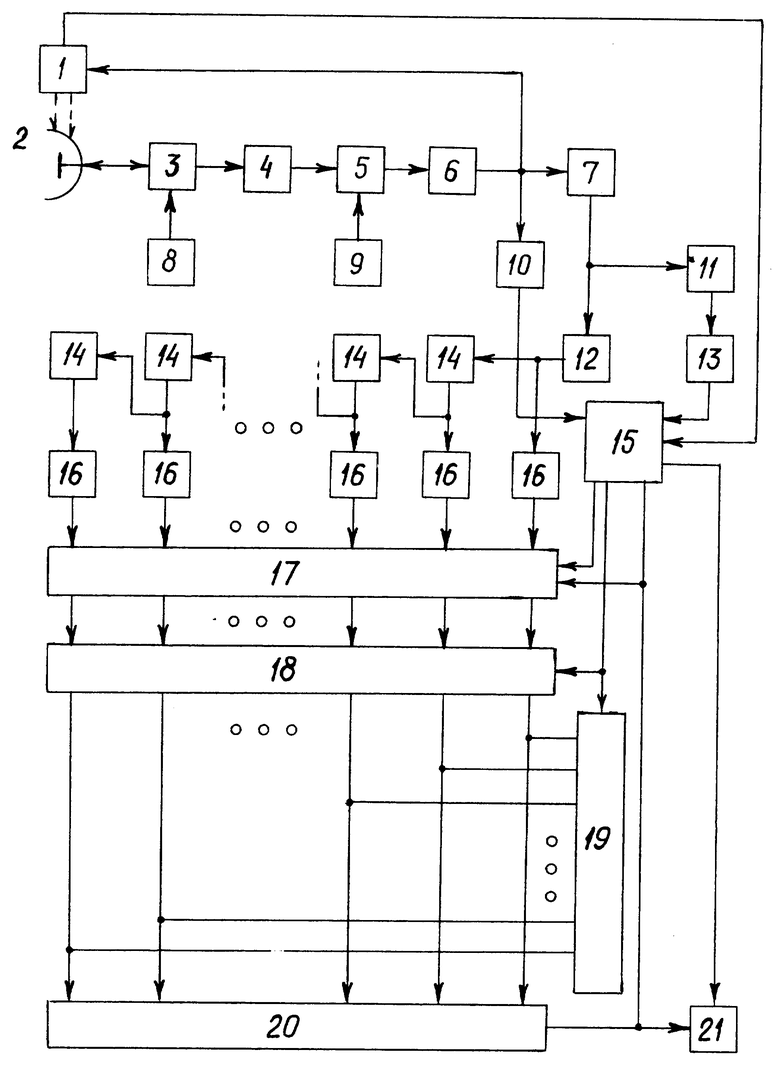
Радиолокационная станция распознавания целей, содержащая передатчик, гетеродин, цифровое управляющее устройство, индикатор, последовательно соединенные антенну, антенный переключатель, усилитель высокой частоты, смеситель, усилитель промежуточной частоты, причем второй вход антенного переключателя связан с выходом передатчика, а второй вход смесителя с выходом гетеродина, отличающаяся тем, что в состав радиолокационной станции дополнительно введены система управления антенной, система измерения дальности, дисперсионная ультразвуковая линия задержки, К аналого-цифровых преобразователей, К-1 линий задержки, запоминающее устройство, коммутатор, инвертор кода, схема И, последовательно включенные амплитудный ограничитель, амплитудный детектор и дифференцирующая цепь, выход которой соединен с вторым входом цифрового управляющего устройства, первый вход которого связан с выходом системы измерения дальности, а третий с вторым выходом системы управления антенной, первый выход которой механически связан с антенной, а вход связан с выходом усилителя промежуточной частоты, входом системы измерения дальности и входом амплитудного ограничителя, выход которого также связан с входом дисперсионной ультразвуковой линии задержки, выход которой подключен к входу первого из К аналого-цифровых преобразователей и входу первой из К-1 линий задержки, выход каждой к-ой с первой по (К 2)-ю линии задержки соединен с входом соответствующей (к + 1)-й линии задержки и входом соответствующего (к + 1)-го аналого-цифрового преобразователя, выход (к 1)-й линии задержки связан с входом К-го аналого-цифрового преобразователя, выход каждого к-го из К аналого-цифровых преобразователей соединен с соответствующим к-ым входом запоминающего устройства, каждый к-й из К выходов которого связан с соответствующим к-ым входом коммутатора, каждый к-й из К выходов которого связан одновременно с соответствующим к-ым входом схемы И и к-ым выходом инвертора кода, вход которого связан с управляющим входом коммутатора и вторым выходом цифрового управляющего устройства, первый выход которого связан с первым управляющим входом запоминающего устройства, а третий с вторым управляющим входом запоминающего устройства, выходом схемы И и первым входом индикатора, второй вход которого подключен к четвертому выходу цифрового управляющего устройства.
| Небабин В.Г., Сергеев В.В | |||
| Методы и техника радиолокационного распознавания | |||
| - М.: Радио и связь, 1984, с.112-114, рис.4.6, с.120-126, рис.4.11. |
