Изобретение относится к устройствам автоматического управления и может быть использовано при построении высоконадежных систем автоматического управления, в частности систем управления движением.
Известно использование однотипных чувствительных элементов при мажоритарном принципе выбора правильно работающего элемента (например, "2" из "3", "3" из "5" и т.п.) [1]
Недостаток этого способа резервирования состоит в большой избыточности чувствительных элементов, которые, как правило, являются сложными и дорогостоящими устройствами (например, акселерометры, гироскопы, датчики угловой скорости и т.д.). При этом с ростом числа допустимых отказов чувствительных элементов резко возрастает количество избыточных датчиков.
Наиболее близким техническим решением к предлагаемому является устройство для управления объектом [2] содержащее n датчиков параметра и m датчиков скорости изменения параметра, выходы которых подключены к информационным входам соответственно первого и второго мультиплексоров, первый и второй последовательно включенные счетчики, разрядные выходы которых соединены соответственно с управляющими входами первого и второго мультиплексоров, последовательно соединенные коммутатор, формирователь контрольного сигнала, выполненный в виде переключаемой структуры апериодическое звено интегратор, блок сравнения, пороговый элемент и первый элемент И, выход которого соединен со счетным входом первого счетчика, второй вход с выходом генератора импульсов и управляющими входами формирователя контрольного сигнала и коммутатора, первый сигнальный вход которого подключен к выходу первого мультиплексора и второму входу блока сравнения, а второй сигнальный вход к выходу второго мультиплексора.
Недостаток этого устройства состоит в том, что при возникновении отказа (отказов) датчиков параметра или датчиков скорости изменения параметра с момента возникновения отказа до момента определения комбинации исправно работающих датчиков в систему управления объектом поступает искаженная информация о состоянии объекта, что может привести к хаотичному срабатыванию (или непрерывному включению) органов управления, что в свою очередь может нарушить процесс управления и привести к выходу из строя системы управления.
Задача изобретения повышение функциональной надежности за счет блокирования ложных сигналов, возникающих в процессе функционирования устройства.
Указанная задача решается тем, что в устройство для управления объектом, содержащее n датчиков параметра и m датчиков скорости изменения параметра, выходы которых подключены к информационным входам соответственно первого и второго мультиплексоров, первый и второй последовательно включенные счетчики, разрядные выходы которых соединены соответственно с управляющими входами первого и второго мультиплексоров, последовательно соединенные коммутатор, формирователь контрольного сигнала, выполненный в виде переключаемой структуры апериодическое звено интегратор, блок сравнения, пороговый элемент и первый элемент И, выход которого соединен со счетным входом первого счетчика, второй вход с выходом генератора импульсов и управляющими входами формирователя контрольного сигнала и коммутатора, первый сигнальный вход которого подключен к выходу первого мультиплексора и второму входу блока сравнения, а второй сигнальный вход к выходу второго мультиплексора, введены триггер, второй элемент И, инвертор, элемент задержки, первый и второй ключи, сигнальные входы которых подключены к выходам соответственно первого и второго мультиплексоров, а управляющие входы к выходу триггера, R-вход которого соединен с выходом первого элемента И, S-вход с выходом элемента задержки, вход которого соединен с выходом второго элемента И, первый и второй входы которого подключены соответственно к выходу генератора и инвертора, соединенного своим входом с выходом порогового элемента, при этом выходы первого и второго ключей являются соответственно первым и вторым выходами устройства.
На чертеже представлена структурная схема устройства для управления объектом. На этой схеме выходы n датчиков параметра 1 соединены с соответствующими информационными входами первого мультиплексора 3, управляющие входы которого подключены к разрядным выходам первого счетчика 5, выходы m датчиков 2 скорости изменения параметра соединены с соответствующими информационными входами второго мультиплексора 4, управляющие входы которого подключены к разрядным выходам второго счетчика 6. Выход первого мультиплексора 3 соединен с сигнальным входом первого ключа 17, первым сигнальным входом коммутатора 8 и вторым входом блока сравнения 10, выход второго мультиплексора 4 соединен с сигнальным входом второго ключа 18 и вторым сигнальным входом коммутатора 8, управляющий вход которого подключен к выходу генератора импульсов 7, управляющему входу формирователя контрольного сигнала 9, первому входу первого элемента И 12 и второму входу второго элемента И 13. Последовательно соединены коммутатор 8, формирователь контрольного сигнала 9, блок сравнения 10, пороговый элемент 11, инвертор 14, второй элемент И 13, элемент задержки 15, выход которого подключен к S-входу триггера 16, R-вход которого соединен с выходом первого элемента И 12 и счетным входом первого счетчика 5, последовательно соединенного с вторым счетчиком 6. Выход триггера 16 соединен с управляющими входами первого 17 и второго 18 ключей, выходы которых подключены соответственно к первому 19 и второму 20 выходам устройства. Второй вход первого элемента И 12 соединен с выходом порогового элемента 11.
Устройство работает следующим образом. В исходном состоянии счетчиков импульсов 5 и 6 их выходные сигналы поступают на управляющие входы первого 3 и второго 4 мультиплексоров соответственно и обеспечивают подключение к входам коммутатора 8, а через первый 17 и второй 18 ключи к первому 19 и второму 20 выходам устройства управляющих сигналов одного из имеющихся n датчиков 1 параметра (например, с номером 1) и одного из имеющихся m датчиков 2 скорости изменения параметра (также, например, с номером 1). Первый 17 и второй 18 ключи открыты, если триггер 16 находится в единичном состоянии, и закрыты, если указанный триггер находится в нулевом состоянии. Если упомянутые ключи открыты, то сигналы датчика параметра 1 через мультиплексор 3 поступают на первый выход устройства 19 (а значит, и в систему управления), а с датчика 2 скорости изменения параметра через мультиплексор 4 на второй выход устройства 20.
Будем считать, что генератор импульсов 7 формирует прямоугольные импульсы длительностью τ и периодом следования T. В момент формирования импульса высокий уровень выходного напряжения Uг генератора 7 переводит коммутатор 8 в положение, при котором на его выход подключается сигнал второго мультиплексора 4 (сигнал выбранного датчика 2 скорости изменения параметра). Одновременно высокий уровень выходного напряжения генератора 7 (Uг=1) подается на выходы первого 12 и второго 13 элементов И и управляющий вход формирователя контрольного сигнала 9, представляющего собой переключаемую структуру апериодическое звено интегратор, при этом при Uг=1 формирователь 9 представляет собой интегратор, а при Uг= 0 - апериодическое звено с постоянной времени ta причем τa <<Tп, где Tп=T-τ (длительность паузы между импульсами генератора 7). При формировании паузы между импульсами длительностью Tп низкий уровень выходного напряжения генератора 7 (Uг=0) переводит коммутатор 8 в положение, при котором на его выход подключается сигнал первого мультиплексора 3 (сигнал выбранного датчика параметра 1), при этом формирователь контрольного сигнала 9 по своей структуре соответствует апериодическому звену.
Пусть в начальный момент времени выходной сигнал генератора импульсов 7 Uг= 0. В этом случае на вход формирователя контрольного сигнала 9 (для рассматриваемого случая апериодическое звено) подается сигнал u1 с выхода первого мультиплексора 3. Выходной uф сигнал формирователя 9 будет практически равен сигналу u1, а выходной сигнал блока сравнения 10 Du uф-u1 близок к нулю. Постоянная времени τa формирователя 9 выбирается из условия
τa ≪ Tп, τa ≪ Tи (1)
где Tи возможный период (частота) изменения сигнала u1. Сигнал Uг=0 блокирует прохождение сигналов через первый 12 и второй 13 элементы И, вследствие чего состояние первого счетчика импульсов 5 и триггера 16 остается неизменным.
По истечении времени t=Tп начинается формирование импульса Uг=1. В этом случае формирователь контрольного сигнала 9 представляет собой интегратор, коммутатор 8 переходит в состояние, при котором на его выход поступает выходной сигнал второго мультиплексора 4, а первый 12 и второй 13 элементы И разблокируются.
Рассмотрим возможные варианты работы устройства в зависимости от неисправности датчиков параметра 1 и датчиков скорости изменения параметра 2. Пусть названные датчики исправны. В этом случае выходной сигнал формирователя контрольного сигнала 9 uф равен
где u10 значение выходного сигнала первого мультиплексора 3 u1 на момент окончания паузы Tп, t текущее время от момента Tп. В соответствии с (2) выходной сигнал Δu блока сравнения 10
Δu = uф-u1 (3)
близок к нулю ( <h), h уровень срабатывания порогового элемента 11). В этом случае пороговый элемент 11 выключен и его выходной сигнал Uп=0 через инвертор 14, второй элемент И 13 подается на элемент задержки 15. По истечении времени τз (время задержки элемента 15) выходной сигнал элемента задержки 15 подается на S-вход триггера 16 и переводит его в единичное состояние. При этом открываются первый 17 и второй 18 ключи, осуществляя соответственно подключение сигнала датчика параметра 1 к первому выходу 19 и сигнала датчика скорости изменения параметра 2 к второму выходу 20 устройства.
<h), h уровень срабатывания порогового элемента 11). В этом случае пороговый элемент 11 выключен и его выходной сигнал Uп=0 через инвертор 14, второй элемент И 13 подается на элемент задержки 15. По истечении времени τз (время задержки элемента 15) выходной сигнал элемента задержки 15 подается на S-вход триггера 16 и переводит его в единичное состояние. При этом открываются первый 17 и второй 18 ключи, осуществляя соответственно подключение сигнала датчика параметра 1 к первому выходу 19 и сигнала датчика скорости изменения параметра 2 к второму выходу 20 устройства.
Предположим, что датчик параметра 1 (с номером 1) неисправен. В этом случае выполняется неравенство
При формировании импульса Uг=1 нарушается равенство (2) и сигнал блока сравнения 10 Δu в некоторый момент времени t становится по модулю более значения h уровня срабатывания порогового элемента 11, выходной сигнал которого Uп=1 через первый элемент И 12 подается на R-вход триггера 16 и счетный вход первого счетчика 5. Триггер 16 устанавливается в нулевое положение, блокируя тем самым через первый 17 и второй 18 ключи прохождение сигналов датчика параметра 1 и датчика скорости изменения параметра 2 соответственно на первый 19 и второй 20 выходы устройства. Одновременно изменяется код первого счетчика 5, тем самым осуществляется подключение к выходу первого мультиплексора 3 другого датчика параметра, например с номером 2.
Если далее подключенные первым мультиплексором 3 датчик параметра и вторым мультиплексором 4 датчик скорости изменения параметра исправны, то устройство функционирует в соответствии с описанным выше вариантом для исправно работающих датчиков, при этом исправно работающие датчики подключаются к первому 19 и второму 20 выходам устройства.
Если один из подключенных первым мультиплексором 3 датчик параметра или вторым мультиплексором 4 датчик скорости изменения параметра неисправны, то устройство функционирует в соответствии с описанным выше вариантом для неисправно работающих датчиков, при этом последовательно перебираются все комбинации подключения датчиков параметра 1 и датчиков скорости изменения параметра 2 до тех пор, пока не будет найдена комбинация двух исправно работающих датчика параметра и датчика скорости изменения параметра.
Время Tx от момента появления неисправности одного из подключенных к выходам 19 и 20 устройства датчиков до момента нахождения комбинации исправно работающих датчиков в зависимости от числа отказавших к этому времени датчиков параметра или датчиков скорости параметра лежит в пределах
2T<Tx<n•m•T. (5)
В рассматриваемом устройстве время Tн от момента появления неисправности одного из подключенных к выходам 19 и 20 датчиков до момента обнаружения неисправности не превышает значения
Tн<2T. (6)
Сравним по функциональной надежности известное [2] и предлагаемое устройства. В известном устройстве [2] выходной сигнал с неисправно работающих датчиков поступает в систему управления в течение времени Tx, в предлагаемом устройстве в течение времени Tн (по истечение времени Tн закрываются первый 17 и второй 18 ключи, блокируя прохождению ложных сигналов на первый 19 и второй 20 выходы устройства). Если в систему управления поступает ложный сигнал, то возникает динамический неуправляемый процесс, который может сопровождаться, например, постоянным включением исполнительных органов системы управления.
Сравним функциональную надежность известного [2] и предлагаемого устройства на примере управления ориентацией космического объекта. Будем считать, что при поступлении ложного сигнала с датчика параметра (углового положения) или с датчика скорости изменения параметра (угловой скорости) несанкционированно включается исполнительный двигатель. В известном устройстве [2] время несанкционированного включения равно Tx, в предлагаемом устройстве Tн. Если, например, n=m=3, T=2 с, то угловое отклонение α1 космического объекта за время Tх равно
где ε угловое ускорение при включенном исполнительном двигателе.
Угловое отклонение a2 космического объекта за время Tн равно
При ε= 1 град•с-2, Tx= 8T, Tн=1,5T a1=128o, α2=4,5o. Из приведенного примера ясно, что при использовании известного устройства фактически нарушается ориентация космического объекта (α1=128o), т.е. система управления не выполняет свою функцию (наступает функциональный отказ). При использовании предлагаемого устройства изменение ориентации составляет 4,5o, что практически не нарушает ориентацию космического объекта, т.е. система сохраняет свою функциональную надежность.
Предлагаемое устройство для управления объектом реализуется с использованием типовых стандартных элементов: мультиплексоров типа 564КП2, счетчиков импульсов типа 564ИЕ10, триггера, элементов И, ключей типа 590КН4, коммутатора типа 590КН5, релейных элементов, генератора и формирователя контрольного сигнала, выполненных на базе операционных усилителей и пассивных R-, C-элементов.
Литература.
1. Епифанов А.Д. Надежность систем управления. М. Машиностроение, 1975, с. 129, рис. 5.1.
2. Патент Российской Федерации N 2006940, кл. G 06F 15/46, G 05B 23/02, 1994 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ КОНТРОЛЬНОЕ УСТРОЙСТВО | 1996 |
|
RU2109318C1 |
| АВТОМАТИЗИРОВАННОЕ КОНТРОЛЬНОЕ УСТРОЙСТВО | 1996 |
|
RU2103717C1 |
| РАСПРЕДЕЛИТЕЛЬ ИМПУЛЬСОВ ДЛЯ УПРАВЛЕНИЯ ЧЕТЫРЕХФАЗНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2133550C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1997 |
|
RU2125762C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2113004C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2115150C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ АСТРОИСТОЧНИКА, ПРЕИМУЩЕСТВЕННО ЗЕМЛИ И/ИЛИ СОЛНЦА | 1997 |
|
RU2131587C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОГРАММНЫМ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2092403C1 |
| СИСТЕМА АНАЛИЗА ТЕЛЕВИЗИОННОГО ИЗОБРАЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1984 |
|
SU1840694A1 |
| ТРАНЗИСТОРНЫЙ КОММУТАТОР | 1996 |
|
RU2125342C1 |
Изобретение относится к устройствам автоматического управления. Технический результат заключается в повышении функциональной надежности за счет блокирования ложных сигналов, возникающих в процессе функционирования, и достигается за счет того, что сигналы n датчиков параметра и m датчиков скорости изменения параметра через первый и второй мультиплексоры подаются на первый и второй ключи, выходы которых являются первым и вторым выходами устройства. При возникновении отказов датчиков формирователь контрольного сигнала, блок сравнения и пороговый элемент вырабатывают сигнал, который через первый и второй элементы И, элемент задержки, триггер закрывают первый и второй ключи, осуществляя тем самым блокировку ложных сигналов, что позволяет повысить функциональную надежность. 1 ил.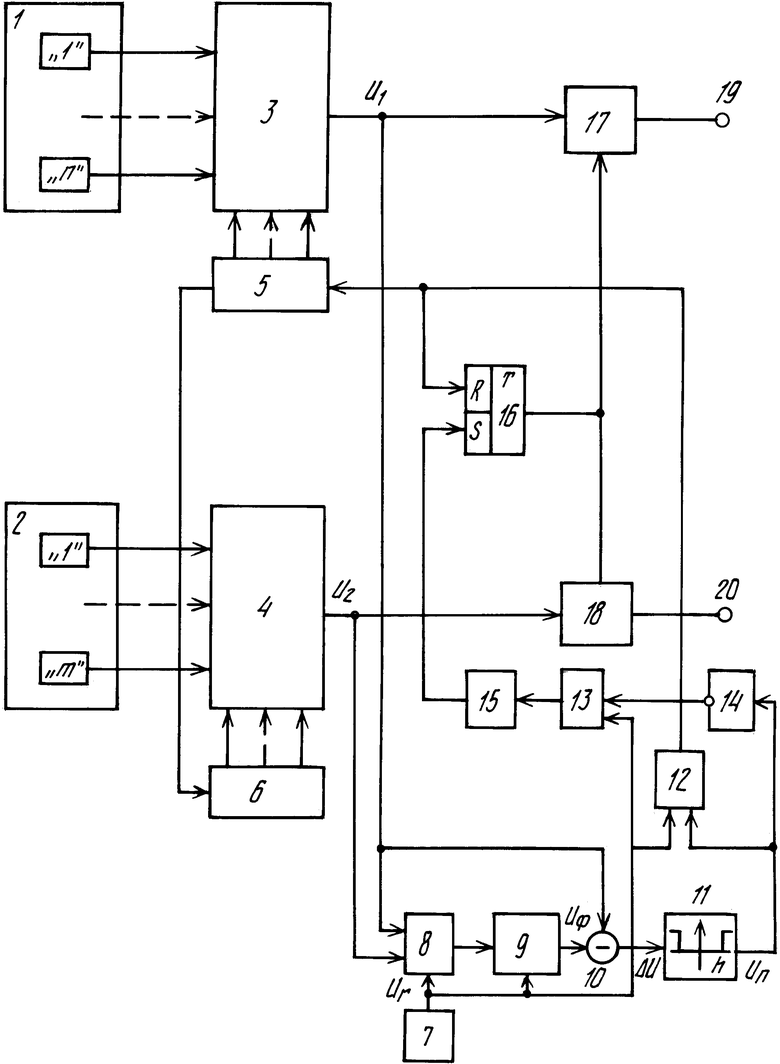
Устройство для управления объектом, содержащее n датчиков параметра и m датчиков скорости изменения параметра, выходы которых подключены к информационным входам соответственно первого и второго мультиплексоров, первый и второй счетчики, разрядные выходы которых соединены соответственно с управляющими входами первого и второго мультиплексоров, а выход переполнения первого счетчика соединен со счетным входом второго счетчика, коммутатор, формирователь контрольного сигнала, выполненный в виде переключаемой структуры "апериодическое звено интегратор", блок сравнения, пороговый элемент и первый элемент И, причем выход коммутатора соединен с информационным входом формирователя контрольного сигнала, выход которого соединен с первым входом блока сравнения, выход которого через пороговый элемент соединен с первым входом первого элемента И, выход которого соединен со счетным входом первого счетчика, а второй вход первого элемента И соединен с выходом генератора импульсов и управляющими входами формирователя контрольного сигнала и коммутатора, первый сигнальный вход которого подключен к выходу первого мультиплексора и второму входу блока сравнения, а второй сигнальный вход к выходу второго мультиплексора, отличающееся тем, что в него введены триггер, второй элемент И, инвертор, элемент задержки, первый и второй ключи, сигнальные входы которых подключены к выходам соответственно первого и второго мультиплексоров, а управляющие входы к выходу триггера, R-вход которого соединен с выходом первого элемента И, S-вход с выходом элемента задержки, вход которого соединен с выходом второго элемента И, первый и второй входы которого подключены соответственно к выходу генератора и инвертора, соединенного своим входом с выходом порогового элемента, при этом выходы первого и второго ключей являются первым и вторым выходами устройства.
| RU, патент, 2006940, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
