Изобретение относится к области управления числом оборотов и вращающим моментом многофазного асинхронного двигателя.
Управление числом оборотов и вращающим моментом многофазного асинхронного двигателя является само по себе достаточно известным и может осуществляться, например, с помощью инвертора.
Из заявки [1] известно сравнение тока статора двигателя с задающей величиной тока для того, чтобы на основании этого вывести ток статора, который должен подаваться от инвестора двигателя, и его частоту. Таким образом число оборотов двигателя может доводиться до требуемой величины и удерживаться на ней, при этом вращающий момент двигателя может управляться в соответствии с задающей величиной тока. В этом уровне техники речь идет о типичном регулировании ограничения тока для непрерывного режима работы двигателя, целью которого является оптимальным образом управлять мощностью двигателя при непрерывном режиме работы (то есть при постоянных в основном условиях).
Недостатком этого известного способа является то, что для оптимального управления двигателем при переходном режиме работы, то есть сравнительно быстро изменяющихся условиях (динамическое управление желательными изменениями числа оборотов при определенных обстоятельствах при изменяющейся нагрузке), никакие мероприятия не предусматриваются.
Из авт. свид. [2] известен способ изменения фактического числа оборотов многофазного асинхронного двигателя, при котором частоту тока статора изменяют до значения, соответствующего заданному числу оборотов.
Недостатком этого известного способа является то, что он пригоден только для непрерывного режима работы двигателя, а в переходном режиме управление изменением фактического числа оборотов не предусмотрено.
В основу изобретения положена задача создать способ, при котором в переходном режиме работы постоянно имеется в распоряжении максимально полезный диапазон числа оборотов двигателя.
В изобретении исходят из знания того, что статические характеристики многофазного двигателя, в основном, достаточным образом определяются в том случае, когда приводится характеристика вращающий момент/число оборотов двигателя, которая в свою очередь определяется магнитным насыщением железа в двигателе, и динамические характеристики двигателя определяются соответственно электрической и механической постоянными времени, следствием чего является то, что преобразование электрической энергии в кинетическую энергию (или наоборот при генераторном режиме работы) происходит за определяемое двигателем конечное время.
Взаимодействие этих статической и динамической характеристик двигателя обеспечивает то, что характеристики двигателя в достаточной степени определяются в том случае, когда приводится параметр рабочее напряжение/рабочая частота вместе с вращающим моментом. Отсюда в свою очередь следует то, что для определенного многофазного асинхронного двигателя при постоянной характеристике напряжение статора частота возможно управление током статора его частотой, а именно, таким образом, что ток статора сохраняет предварительно рассчитанную величину тока в том случае, когда изменяются или подлежат изменению эксплутационные условия (нагрузка, число оборотов и т.д.). При этом указанная предварительно рассчитанная величина тока статора в принципе может свободно выбираться. Однако для того, чтобы получить наилучшую возможную эффективную мощность двигателя, предварительно рассчитанная величина тока статора должна выбираться в пределах диапазона, в котором вращающий момент двигателя приблизительно пропорционален току статора. Следовательно, рекомендуется выбирать заданную величину тока, определяющую ток статора, таким образом, чтобы достигался вращающий момент между нулем и опрокидывающим моментом двигателя. Поэтому следует выбирать заданную величину тока между нулем и тем (зависящим от намагничивания) эффективным значением тока статора, при котором достигается опрокидывающий момент.
На основе этих знаний для достижения указанного вначале измерения числа оборотов многофазного асинхронного двигателя в способе согласно изобретению поставленная задача решается тем, что изменение частоты осуществляют ступенчато, на каждой ступени частоту тока статора изменяют с предварительно рассчитанной для данной ступени скоростью, одновременно измеряют ток статора, сравнивают его эффективное значение с предварительно рассчитанным для данной ступени заданным значением, если эффективное значение тока статора превышает заданное значение, то изменение частоты тока статора прекращают, поддерживая ее постоянной до тех пор, пока эффективное значение тока не станет меньше заданного значения, повторяют указанные операции до тех пор, пока частота тока статора не будет соответствовать заданному числу оборотов двигателя, при этом направление изменения скорости частоты тока статора противоположно направлению изменения числа оборотов двигателя.
В способе согласно изобретению скорость изменения частоты тока статора может быть установлена такой величины, при которой изменение числа оборотов двигателя до заданного значения осуществляется непрерывно.
В способе согласно изобретению скорость изменения частоты тока статора может быть установлена такой величины, при которой изменение числа оборотов двигателя до заданного значения осуществляют по гирляндообразной кривой.
При этом изменение числа оборотов может быть как ускорением, так и затормаживанием. Если многофазный ток статора двигателя подается инвертором, электрическая энергия поступает от сети переменного напряжения и через выпрямитель получается в виде постоянного тока, двигатель может ускоряться или затормаживаться поступившей электрической энергией. В любом случае двигатель тормозится, когда инвертор, при исчезновении напряжения в сети переменного напряжения получает электрическую энергию от многофазного тока статора двигателя, преобразует ее в постоянный ток и замыкает на аккумулятор энергии и/или нагрузочное сопротивление.
Является возможным и, в основном, эквивалентным измерение эффективного значения тока статора на стороне переменного тока инвертора непосредственно или на стороне постоянного тока инвертора косвенно (например, в виде падения напряжения на измерительном сопротивлении).
С помощью способа согласно изобретению изменение числа оборотов осуществляется, в основном, при сохранении постоянным вращающего момента при величине, соответствующей заданной величине тока. Проще говоря, в способе согласно изобретению поток энергии в ротор управляется частотой при пропорциональной частоте напряжения статора. Тем самым предупреждается то, что двигатель при большом проскальзывании, уменьшенном коэффициенте полезного действия и высокой мощности потерь в роторе работает в диапазоне, где ток непропорционален вращающему моменту. Изменение числа оборотов может оптимизироваться в той степени, что оно осуществляется по выбору, например, с максимально доступным током статора и вращающим моментом (опрокидывающий момент) или, например, с максимально или оптимально совместимым с нагрузкой вращающим моментом. Если при максимально допустимом вращающим моменте происходит ускорение или замедление, то двигатель проявляет свои наилучшие возможные характеристики, задаваемые физическими пределами, в отношении динамики и коэффициента полезного действия, то есть он имеет минимальные электрическую и механическую постоянные времени. Другими словами, скорость изменения числа оборотов по времени является тогда максимальной.
В случае ускорения мгновенная величина напряжения статора является зависимой от мгновенной частоты инвертора, тогда как фактические напряжение статора является зависимым от схемы двигателя (схема звезды или схема треугольника или четырехугольника), и максимальная величина возможного напряжения статора определяется постоянным напряжением, зависящим от сетевого напряжения. Тем самым автоматически постоянно на двигатель подается максимальная при используемом сетевом напряжении приводящая мощность. Если изменение напряжения статора по частоте из-за недостаточного сетевого напряжения отличается от имеющегося параметра рабочее напряжение/рабочая частота двигателя, то возникает так называемое ослабление поля. Это может быть установлено с помощью так называемого отклонения и с преимуществом (в смысле информации об имеющихся эксплутационных условиях) просигнализировано.
В одном варианте осуществления способа скорость изменения частоты может быть выбрана такой малой, что результирующее изменение числа оборотов по времени проходит в основном непрерывно, так как эффективное значение тока статора не является заметно большим по сравнению с заданной величиной тока и тем самым частота поддерживается постоянной лишь в течение незаметно малого времени. Для этой цели скорость изменения частоты выбирается, например, такой, что результирующее изменение частоты не превышает приблизительно от 3 до 5% от мгновенной частоты, то есть приблизительно половину величины проскальзывания двигателя. Пригодная скорость изменения частоты соотносится с соответствующей электрической постоянной времени используемого двигателя, а эта постоянная в свою очередь соотносится с системой двигателей в виде относительной величины. Надлежащая скорость изменения частоты составляет, например, 0,1 Гц/мкс для применения к приводу высокоскоростных шпинделей.
Во втором варианте осуществления способа скорость изменения частоты может выбираться настолько большой, что характеристика результирующего изменения числа оборотов по времени в основном проходит гирляндообразно, так как эффективное значение тока статора при любом изменении частоты заметно больше, чем задающая величина тока и тем самым частота в течение заметного промежутка времени поддерживается постоянной. Этот промежуток времени, в течение которого двигатель повышает свое число оборотов за счет преобразования электрической энергии в механическую энергию, является зависимым только от определенных характеристик привода, а именно от индуктивной электрической величины, от коэффициента полезного действия двигателя, от момента инерции двигателя, от момента инерции нагрузки и от создаваемого нагрузкой момента нагрузки. Следовательно, названный промежуток времени является следствием непосредственно предшествующего изменения частоты и находится в фиксированном соотношении с ним, так что форма отдельного элемента фестона позволяет описать названные характеристики привода. Эти характеристики привода имеют известную аналогию с прочностью на скручивание вала: поэтому они могут быть обозначены как "прочность на скручивание привода". Относящийся сюда анализ измерения частоты по времени, следовательно параметров (электрическая и механическая постоянные), характеризующих форму и размер элемента гирляндообразной характеристики, может, например, осуществляться с помощью соответственно запрограммированного микрокомпьютера, выводящего на основании этого величину "прочности на скручивание привода" и при определенных обстоятельствах индуцирующего ее.
При осуществлении способа согласно изобретению необязательно измерять число оборотов двигателя или его проскальзывание. В частности, не требуется датчик числа оборотов. Поэтому соответственно простым является требующееся для осуществления способа согласно изобретению устройство. Проскальзывание само собой устанавливается, в основном, на постоянную величину, определяемую заданной величиной тока. Тем самым также устанавливается постоянная мощность потерь, что предпочтительным образом поддерживает постоянными термические и кинетические условия эксплуатации в том случае, когда заданную величину току выбирают равной рабочему току.
При торможении перед осуществлением следующего изменения частоты может устанавливаться, что частота тока статора меньше, чем предварительно определенная предельная величина, и инвертором можно затем управлять таким образом, чтобы он подводил к статору двигателя постоянный ток для того, чтобы остановить ротор или в виде векторно управляемого постоянного тока использовать этот процесс для того, чтобы приводить ротор или перемещаемый ротором предмет, с помощью датчиков положения в определенное положение или осуществлять очень медленные вращательные движения (область самых малых чисел оборотов). При этом интенсивность постоянного тока сначала во время предварительно определенного промежутка времени может быть, в основном, равной эффективному значению номинального тока двигателя и вслед за тем уменьшаться до части названной интенсивности. Также эти процессы могут осуществляться, например, с помощью соответствующим образом запрограмированного микрокомпьютера.
Для осуществления описанных выше функций управление, включенное перед инвертором, содержит микрокомпьютер, соответствующим образом запрограмированный помимо прочего для того, чтобы подать инвертору в надлежащий момент времени надлежащие сигналы для зажигания переключаемых полупроводниковых элементов, например, типа IGBT ("isdated gate bipolar transistor" -изолированный вентильный биполярный транзистор). В это управление, соответственно его микрокомпьютер, вводят, например, вручную, среди прочего заданную величину тока и скорость изменения частоты, а также имеющуюся характеристику рабочее напряжение / рабочая частота и ток статора для максимального вращающего момента используемого многофазного асинхронного двигателя. На стороне постоянного тока инвертора предусмотрено, например, измерительное сопротивление при последовательном включении между выпрямителем и инвертором для измерения тока статора в виде величины падения напряжения на этом измерительном сопротивлении, причем эта величина подводится к управлению или его микрокомпьютеру.
Тот факт, что способ согласно изобретению исходит из постоянного характеристического параметра рабочее напряжение / рабочая частота многофазного асинхронного двигателя при выдаче номинального вращающего момента в постоянном режиме работы для управления двигателем частотой тока статора, имеет своим последствием также то, что с помощью простых средств является возможным существенно расширить диапазон частот, используемый с данным многофазным асинхронным двигателем.
А именно, если режим работы инвертора переключают между питанием двигателя в соответствии с его параметром рабочее напряжение / рабочая частота для схемы звезды и питанием двигателя в соответствии с его параметром рабочее напряжение / рабочая частота для схемы треугольника (при трехфазном двигателе) или четырехугольника (при четырехфазном двигателе), и одновременно понижают вводимый в управление параметр рабочее напряжение / рабочая частота на коэффициент  или
или  то используемый диапазон числа оборотов при остающемся неизменном в основном вращающем моменте может быть повышен на тот же коэффициент
то используемый диапазон числа оборотов при остающемся неизменном в основном вращающем моменте может быть повышен на тот же коэффициент  или
или  что в свою очередь повышает на тот же коэффициент
что в свою очередь повышает на тот же коэффициент  или
или  мощность привода.
мощность привода.
Однако также является возможным изменять соответственно частоту тока статора в том же направлении на тот же коэффициент, что и вводимый в управление параметр рабочее напряжение / рабочая частота, таким образом, чтобы условия намагничивания в статоре и тем самым также вращающий момент двигателя оставались постоянным.
При трехфазном двигателе параметры рабочее напряжение / рабочая частота, подводимые от управления, образуют преимущественно геометрическую прогрессию в соотношении 1:  3:
3:  то есть с коэффициентом
то есть с коэффициентом  в качестве закона образования. Тогда используемый диапазон числа оборотов данного трехфазного двигателя, определенного с помощью вращающего момента и параметров рабочее напряжение / рабочая частота для схемы звезды или треугольника, выключает в себя один за другим первый диапазон, при котором двигатель запитывают по схеме звезды и вводимый в инвертор параметр рабочее напряжение / рабочая частота на коэффициент
в качестве закона образования. Тогда используемый диапазон числа оборотов данного трехфазного двигателя, определенного с помощью вращающего момента и параметров рабочее напряжение / рабочая частота для схемы звезды или треугольника, выключает в себя один за другим первый диапазон, при котором двигатель запитывают по схеме звезды и вводимый в инвертор параметр рабочее напряжение / рабочая частота на коэффициент  выше, чем определенный для двигателя параметр рабочее напряжение / рабочая частота для схемы звезды (высокое насыщение); второй диапазон, при котором двигатель и далее запитывает по схеме звезды и теперь вводимый в инвертор параметр рабочее напряжение / рабочая частота равен определяющему двигатель параметру рабочее напряжение / рабочая частота для схемы звезды (нормальное насыщение); третий диапазон, при котором двигатель запитывают по схеме треугольника и вводимый в инвертор параметр рабочее напряжение / рабочая частота на коэффициент
выше, чем определенный для двигателя параметр рабочее напряжение / рабочая частота для схемы звезды (высокое насыщение); второй диапазон, при котором двигатель и далее запитывает по схеме звезды и теперь вводимый в инвертор параметр рабочее напряжение / рабочая частота равен определяющему двигатель параметру рабочее напряжение / рабочая частота для схемы звезды (нормальное насыщение); третий диапазон, при котором двигатель запитывают по схеме треугольника и вводимый в инвертор параметр рабочее напряжение / рабочая частота на коэффициент  ниже по сравнению с определяющим двигатель параметром рабочее напряжение / рабочая частота для схемы треугольника (нормальное насыщение); четвертый диапазон, при котором двигатель и далее запитывают по схеме треугольника и теперь вводимый в инвертор параметр рабочее напряжение /рабочая частота вновь на коэффициент
ниже по сравнению с определяющим двигатель параметром рабочее напряжение / рабочая частота для схемы треугольника (нормальное насыщение); четвертый диапазон, при котором двигатель и далее запитывают по схеме треугольника и теперь вводимый в инвертор параметр рабочее напряжение /рабочая частота вновь на коэффициент  ниже по сравнению с определяющим двигатель параметр рабочее напряжение / рабочая частота для схемы треугольника и тем самым слабее насыщает двигатель, но еще раз приводит к повышению числа оборотов на коэффициент
ниже по сравнению с определяющим двигатель параметр рабочее напряжение / рабочая частота для схемы треугольника и тем самым слабее насыщает двигатель, но еще раз приводит к повышению числа оборотов на коэффициент  Эта последовательность возможных рабочих диапазонов позволяет эксплуатировать двигатель от самых низких чисел оборотов (процесс торможения, процесс позиционирования) до максимально допустимой поверхностной скорости ротора, что обеспечивает для одного и того же двигателя используемый диапазон числа оборотов с наибольшим или наименьшим достигаемым числом оборотов, находящимся друг с другом в соотношении 1:1000 иле более. При этом за исключением диапазона, в котором возникает ослабленное насыщение, двигатель эксплуатируют с номинальным вращающим моментом. Достигаемый здесь диапазон числа оборотов с помощью традиционной техники привода достигается за счет 5 различных типов двигателей.
Эта последовательность возможных рабочих диапазонов позволяет эксплуатировать двигатель от самых низких чисел оборотов (процесс торможения, процесс позиционирования) до максимально допустимой поверхностной скорости ротора, что обеспечивает для одного и того же двигателя используемый диапазон числа оборотов с наибольшим или наименьшим достигаемым числом оборотов, находящимся друг с другом в соотношении 1:1000 иле более. При этом за исключением диапазона, в котором возникает ослабленное насыщение, двигатель эксплуатируют с номинальным вращающим моментом. Достигаемый здесь диапазон числа оборотов с помощью традиционной техники привода достигается за счет 5 различных типов двигателей.
Помимо этого, одновременно является возможным в одной системе двигателей составить последовательность трехфазных асинхронных двигателей, определяемых их одинаковым максимальным вращающим моментом (для того, чтобы иметь возможность определять максимальные мощности одинаковой геометрии ротора) и их отличным образом друг от друга определенными параметрами рабочее напряжение / рабочая частота (или соответствующей обратной величиной в Гц/В). При этом параметр рабочее напряжение / рабочая частота, соответствующая одному из этих двигателей, соответственно является одним из элементов образованной с помощью величины  в качестве коэффициента геометрической прогрессии, так что двигатели этой системы двигателей согласованы друг с другом и в сочетании с инвертором с коэффициентом
в качестве коэффициента геометрической прогрессии, так что двигатели этой системы двигателей согласованы друг с другом и в сочетании с инвертором с коэффициентом  в качестве закона образования. Такая система двигателей является предметом изобретения, и любой из двигателей такой системы затем подключается к инвертору, при этом для осуществления способа согласно изобретению коэффициентом
в качестве закона образования. Такая система двигателей является предметом изобретения, и любой из двигателей такой системы затем подключается к инвертору, при этом для осуществления способа согласно изобретению коэффициентом  в инверторе осуществляется автоматическое согласование относительно скорости изменения частоты, торможения постоянным током, при определенных обстоятельствах векторного управления для очень низких чисел оборотов или вариации торможения постоянным током для точного позиционирования.
в инверторе осуществляется автоматическое согласование относительно скорости изменения частоты, торможения постоянным током, при определенных обстоятельствах векторного управления для очень низких чисел оборотов или вариации торможения постоянным током для точного позиционирования.
При этом закон образования для оптимизации системы двигателей с коэффициентом  относятся к трехфазным асинхронным двигателям. Является возможным достигать приближения к этому закону образования с помощью числа пар полюсов двигателя: надлежащее число пар полюсов, обеспечивающее технически целесообразные решения и диапазоны числа оборотов и позволяющие взаимозаменяемость двигателей между собой, составляют величины 1, 2, 3, 5, 9 и т. д. то есть при приближении к закону образования с помощью числа пар полюсов следует составлять двигатели, являющиеся соответственно 2-полюсными, 4-полюсными, 6-полюсными, 10-полюсными, 18-полюсными и т.д.
относятся к трехфазным асинхронным двигателям. Является возможным достигать приближения к этому закону образования с помощью числа пар полюсов двигателя: надлежащее число пар полюсов, обеспечивающее технически целесообразные решения и диапазоны числа оборотов и позволяющие взаимозаменяемость двигателей между собой, составляют величины 1, 2, 3, 5, 9 и т. д. то есть при приближении к закону образования с помощью числа пар полюсов следует составлять двигатели, являющиеся соответственно 2-полюсными, 4-полюсными, 6-полюсными, 10-полюсными, 18-полюсными и т.д.
Из двух таких "соседних" двигателей в системе двигателей, соответствующих двум следующим друг за другом членам геометрической прогрессии, один может по выбору эксплуатироваться ( при соответственно предварительно заданной рабочей частоте fi, равной, например, 50 Гц ) в полосе частот от нуля до частоты fi,  •fi, 3•fi или
•fi, 3•fi или  •fi, тогда как другой по выбору может эксплуатироваться в полосе частот от нуля до частоты 9•fi,
•fi, тогда как другой по выбору может эксплуатироваться в полосе частот от нуля до частоты 9•fi,  •fi, 27fi,
•fi, 27fi,  •fi. Тем самым соответствующим параметрам рабочее напряжение / рабочая частота этих обоих определенных в системе двигателей "соседних" двигателей соответствуют два члена геометрической прогрессии, образованной с коэффициентом 9. С помощью таких двух двигателей может получаться приблизительно в 47 раз больший диапазон вариации частот по сравнению с единственным двигателем в пределах единственного диапазона изменения частот.
•fi. Тем самым соответствующим параметрам рабочее напряжение / рабочая частота этих обоих определенных в системе двигателей "соседних" двигателей соответствуют два члена геометрической прогрессии, образованной с коэффициентом 9. С помощью таких двух двигателей может получаться приблизительно в 47 раз больший диапазон вариации частот по сравнению с единственным двигателем в пределах единственного диапазона изменения частот.
На практике рассматривается система двигателей, у которой частотные полосы двигателей перекрываются соответственно на одну или две частотные ступени. Из двух "соседних" двигателей, соответствующих следующим друг за другом членам геометрической прогрессии, здесь один может по выбору эксплуатироваться (при соответственно предварительно заданной рабочей частоте fi, равной, например, 50 Гц) в полосе частот от нуля до частоты fi,  •fi, 3•fi или
•fi, 3•fi или  •fi, тогда как другой по выбору может эксплуатироваться в полосе частот от нуля до частоты
•fi, тогда как другой по выбору может эксплуатироваться в полосе частот от нуля до частоты  •fi, 9•fi,
•fi, 9•fi,  •fi и 27•fi (при перекрывании соответственно на одну частотную ступень ), соответственно до частоты 3•fi,
•fi и 27•fi (при перекрывании соответственно на одну частотную ступень ), соответственно до частоты 3•fi,  •fi, 9•fi и
•fi, 9•fi и  •fi (при перекрывании соответственно на две частотные ступени). Тем самым соответствующие параметры рабочее напряжение / рабочая частота этих "соседних" двигателей в системе двигателей соответствуют двум соседним членам геометрической прогрессии, образованной с помощью величены
•fi (при перекрывании соответственно на две частотные ступени). Тем самым соответствующие параметры рабочее напряжение / рабочая частота этих "соседних" двигателей в системе двигателей соответствуют двум соседним членам геометрической прогрессии, образованной с помощью величены  или 3, в качестве коэффициента. С помощью таких двух "соседних" двигателей может охватываться на
или 3, в качестве коэффициента. С помощью таких двух "соседних" двигателей может охватываться на  или 27, больший используемый диапазон частот (и тем самым диапазон чисел оборотов) по сравнению с тем, что можно было бы охватить с помощью только одного из этих обоих двигателей.
или 27, больший используемый диапазон частот (и тем самым диапазон чисел оборотов) по сравнению с тем, что можно было бы охватить с помощью только одного из этих обоих двигателей.
При четырехфазном двигателе подводимые к управлению параметры рабочее напряжение / рабочая частота образуют преимущественно геометрическую прогрессию в соотношении 1:  2:
2:  то есть с коэффициентом
то есть с коэффициентом  в качестве закона образования. Приведенные выше пояснения в отношении случая трехфазного двигателя могут быть перенесены на четырехфазный двигатель, охватываемый с помощью такой системы двигателей используемый диапазон частот / и тем самым диапазон чисел оборотов / может расшириться на соответствующий коэффициент 8, или
в качестве закона образования. Приведенные выше пояснения в отношении случая трехфазного двигателя могут быть перенесены на четырехфазный двигатель, охватываемый с помощью такой системы двигателей используемый диапазон частот / и тем самым диапазон чисел оборотов / может расшириться на соответствующий коэффициент 8, или  или 4.
или 4.
Согласно изобретению у используемого двигателя системы двигателей может быть определена зависимость тока статора от его частоты и от напряжения статора и на основании этого выведено то, какую характеристику рабочее напряжение / рабочая частота имеет подключенный к инвертору двигатель, и в зависимости от этого и от включения инвертора по схеме звезды или треугольника, или четырехугольника, какие параметры рабочее напряжение / рабочая частота могут вводиться в управление.
Из соответствия параметров рабочее напряжение / рабочая частота (или их обратной величины в Гц/В) двигателям при процессе торможения также выводится соответствующая частота импульсов торможения, благодаря чему постоянно получается оптимальное согласование с соответственно подлежащей затормаживанию индуктивной нагрузкой.
Изобретение более подробно описывается далее со ссылкой на чертеж, где дано графическое изображение изменения частоты тока статора во времени и увеличенный участок этого изменения.
На чертеже графически показано, каким образом управляют изменением частоты f тока статора во времени t. Также изображен в увеличенном масштабе участок описываемого изменения.
Изменение частоты тока статора на получающееся увеличение частоты (характеристика FA на увеличенном участке) повышает эффективное значение тока статора таким образом, что вследствие момента нагрузки заданная величина тока по меньшей мере на короткое время незначительно превышается и поэтому частота поддерживается постоянной (характеристика FK на увеличенном участке). В связи с тем, что соответственно двигатель изменяет свое число оборотов, снижается эффективное значение тока статора при поддержании постоянства частоты и вследствие преобразования подведенной электрической энергии в энергию вращения вновь ниже заданной величины тока, так что начинается следующее измерение частоты тока статора (характеристика как FA на увеличенном участке). Получается ступенчатое изменение частоты тока статора (характеристики FA, FK). Однако когда скорость изменения частоты выбирают достаточно малой, ступеньки становятся настолько малыми, что они являются практически невоспринимаемыми и результирующее изменение числа оборотов двигателя М во времени проходит в основном (то есть если рассматривать на макроскопическом уровне) непрерывно, как это показано на чертеже с помощью изображающей эффективное число оборотов характеристики FF (эта характеристика FF повторена на увеличенном участке и тем самым изображена в ее истинной гирляндообразной форме). За оптимальное время Т частота f тока статора достигает своей номинальной величины fs и на основании этого получается с учетом проскальзывания число оборотов двигателя М.
На увеличенном участке фиг. 1 повторены ось времени t и ось частот f, стороны изображенного угла α параллельны оси времени t и характеристике FA увеличения частоты, и тем самым скорость изменения частоты равна tg ( a ).
На чертеже также изображена представляющая эффективное число оборотов характеристика FB для торможения двигателя М: она, в основном, симметрична характеристике FF. Обе характеристики FF и FB, если рассматривать на микроскопическом уровне, изменяются в основном непрерывно и параболически до тех пор, пока не будет достигнуто соответствующая номинальная величина fs, или нуль, и обе проходят, если смотреть на микроскопическом уровне, в основном гирляндообразно.
Микрокомпьютер может измерять продолжительность увеличения частоты (характеристики FA и FA') получающуюся при предварительно определенной скорости изменения частоты: эта продолжительность соответствует электрической постоянной времени двигателя в динамических условиях при предварительно заданном токе статора предварительно определенном заданной величиной тока.
Микрокомпьютер также может измерять совокупную продолжительность увеличения числа оборотов за частотную ступень при постоянной частоте (характеристики FA и FK). Эта продолжительность требуется двигателю для того, чтобы отследить число оборотов и тем самым произвести соответствующие уменьшения эффективного значения тока статора, что, в свою очередь, вновь вызывает следующее увеличение частоты (характеристика FA): Эта продолжительность соответствует механической постоянной времени двигателя, определяемой моментом инерции.
Обе эти измеренные продолжительности описывают важный эксплуатационный параметр двигателя и его механической нагрузки, то есть всего привода: отсюда можно получить величину уже упомянутой "прочности на скручивание привода". Поэтому с целью этих измерений является предпочтительным выбирать скорость изменения частоты такой по величине, чтобы как следствие сильно увеличенного за счет этого эффективного значения тока статора частота при рассмотрении также на макроскопическом уровне оставалась периодически постоянной, так что характеристика результирующего числа оборотов во времени в основном проходит гирляндообразно. Тогда характеристика FF проходит также и без увеличения видимым образом гирляндообразно, как это изображено на участке на чертеже.
Если скорость изменения частоты относительно времени разгона двигателя является высокой, то получаются более длинные характеристики FA и FK и, соответственно, меньшее количество больших элементов гирляндообразной характеристики FF. Двигатель работает тогда не оптимальным образом. Наоборот, привод является более способным к реагированию (более "динамичным") настолько, насколько характеристики FA и FK короче и элементы гирляндообразной характеристики FF многочисленнее и меньше. Поэтому для цели измерения рекомендуется осуществлять увеличение частоты (характеристика FA или FA') таким образом, чтобы эффективное значение тока статора постоянно располагалось вблизи от заданной величины тока, следовательно, превышало ее лишь настолько, насколько это требуется для обеспечения измерения, так частота удерживается постоянной также лишь короткое время (характеристика FK). Микрокомпьютер может соответствующим образом программироваться.
Важные дополнительные функции микрокомпьютера состоят в том, чтобы управлять уже приведенными специальными способами, а именно, оптимизированный способ удержания в конце торможения, переключение между схемой звезды и схемой треугольником при поддержании постоянными магнитных соотношений статора, и автоматическое согласование с различными двигателями системы согласованных друг с другом двигателей вновь при поддержании постоянными магнитных соотношений статора.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ МНОГОФАЗНОЙ НАГРУЗКИ | 1990 |
|
RU2041555C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1997 |
|
RU2193814C2 |
| СИСТЕМА ГРУППОВОГО ЭНЕРГОСНАБЖЕНИЯ АСИНХРОННЫХ ТЯГОВЫХ ДВИГАТЕЛЕЙ | 1999 |
|
RU2166441C2 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ПРИВОДА С АСИНХРОННЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2222097C2 |
| СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОРОМ | 2011 |
|
RU2578165C2 |
| Устройство для приведения в действие с переменным числом оборотов многофазного асинхронного двигателя | 1933 |
|
SU38226A1 |
| СПОСОБ СНИЖЕНИЯ ШУМА ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2667079C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ С ФАЗНЫМ РОТОРОМ | 2023 |
|
RU2821722C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| Электромашинный агрегат | 1943 |
|
SU67545A1 |
Использование: для управления числом оборотов и вращающим моментом многофазного асинхронного двигателя. Сущность: в способе изменения фактического числа оборотов многофазного асинхронного двигателя изменение частоты тока статора до значения, соответствующего заданному числу оборотов осуществляют ступенчато с предварительно рассчитанной для каждой ступени скоростью. Измеряют ток статора, сравнивают его эффективное значение с предварительно рассчитанным заданным для каждой ступени значением. По результатам сравнения прекращают изменение частоты тока статора, поддерживая ее постоянной до момента достижения эффективным током значения меньше заданного. Повторяют указанные операции до тех пор, пока частота тока не будет соответствовать заданному числу оборотов. Направление изменения скорости противоположно изменению числа оборотов двигателя. В результате в переходных режимах работы имеется в распоряжении максимально полезный диапазон числа оборотов двигателя. 2 з.п. ф-лы, 1 ил.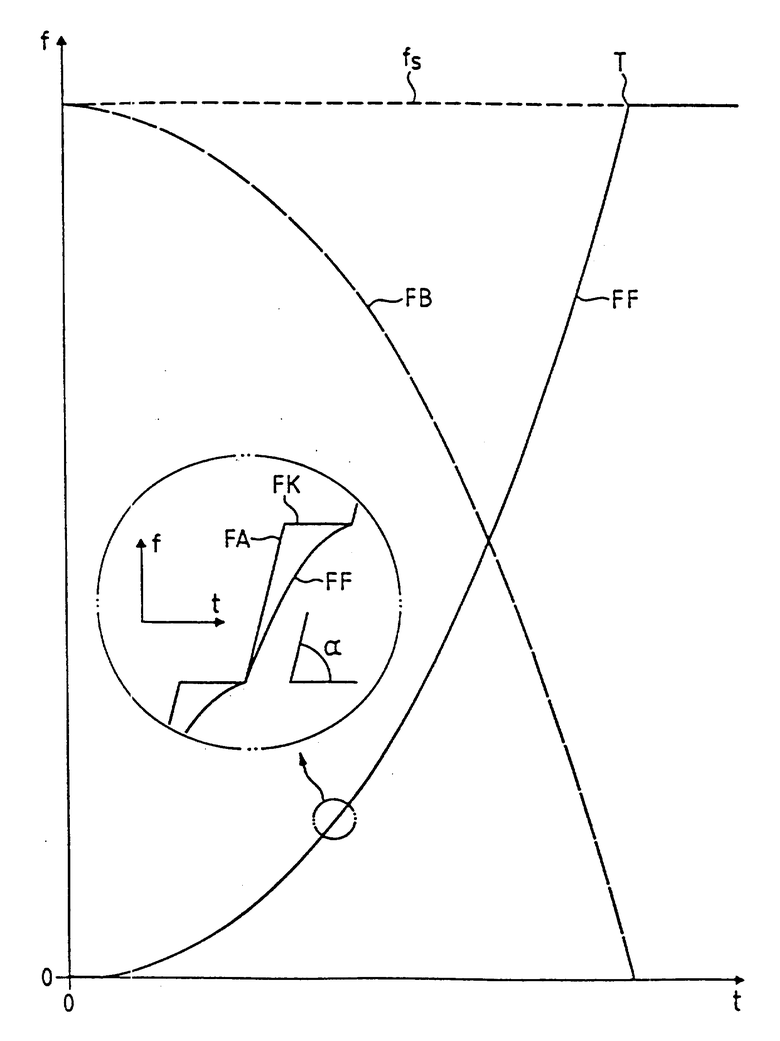
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Заявка ФРГ N 3737633, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для поддержания постоянства отношения напряжения к частоте | 1971 |
|
SU476643A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
