Изобретение относится к способу снижения шумов двигателя, питаемого с помощью инвертора. Кроме того, изобретение относится к устройству регулирования для уменьшения таких шумов двигателя, питаемого с помощью инвертора, а также к системе привода с таким устройством регулирования, инвертором и двигателем.
Значительная часть излучаемого от двигателей шума имеет электромагнитное происхождение. В этом случае волны радиальных усилий создаются в двигателях посредством высших гармоник магнитного потока в двигателе, которые возникают за счет несинусоидального распределения обмоток статора и ротора, а также за счет колебаний воздушного зазора из-за пазовости статора и ротора.
Волны радиальных усилий возбуждают листовой сердечник. Возникают колебания, которые передаются в виде корпусного шума и распространяются как шум через окружающий корпус. Корпус выступает в качестве передающего элемента и усиливает уровень излученного шума в области его собственных частот.
Для того чтобы уменьшить шум двигателя, обычно пытаются либо изменять или оптимизировать механическую конструкцию двигателя, либо сводить к минимуму с помощью процесса модуляции обусловленные инвертором временные гармоники, а также избегать обусловленных инвертором временных гармоник с частотами вблизи резонансных точек двигателя.
В основе изобретения лежит задача дополнительно уменьшить шумы двигателя питаемых инвертором двигателей.
Эта задача решается способом уменьшения шумов в двигателе, питаемом с помощью инвертора, причем, в зависимости от нагрузочного момента на двигателе, магнитный поток в двигателе изменяется таким образом, что произведение основного колебания магнитного потока на высшую гармонику магнитного потока уменьшается.
Эта задача также решается устройством регулирования для уменьшения шумов двигателя, питаемого с помощью инвертора, посредством способа уменьшения шумов двигателя, питаемого с помощью инвертора, причем устройство регулирования может соединяться с инвертором таким образом, что может передаваться целевое значение для магнитного потока двигателя. Задача также решается системой привода, которая содержит такое устройство регулирования, инвертор и двигатель.
Предпочтительные варианты осуществления настоящего изобретения приведены в зависимых пунктах формулы изобретения.
Изобретение основано на понимании того, что в приводах с изменяемым числом оборотов, которые питаются от инверторов, дополнительно к вышеупомянутым волнам радиальных усилий, возникают дополнительные волны усилий. Волны радиальных усилий, которые вызывают развитие шума, обуславливаются за счет взаимодействия основного колебания магнитного потока с его временными гармониками. Решающим для развития шума двигателя при инверторном режиме работы является произведение основного колебания магнитного потока на одну или несколько высших гармоник магнитного потока. Последняя(ие) зависит(ят) от параметров, которые выводятся из модуляции инвертора, например, таких как тип модуляции (импульсная последовательность), глубина модуляции и частота импульсов.
Для того чтобы объяснить происхождение обусловленных инвертором волн радиальных усилий теоретически более точно, принимается упрощенный случай, заключающийся в том, что для генерации магнитного потока в статорном напряжении присутствуют основное колебание и две высшие гармоники. В этом случае пространственный вектор статорного напряжения описывается следующим уравнением
Плотность магнитного потока в воздушном зазоре асинхронного двигателя может быть представлена в виде вращающегося вектора. В предположении статорного напряжения, плотность магнитного потока

при  ~
~ и
и  ~
~ . Проекция поворотного вектора
. Проекция поворотного вектора  на ось в месте
на ось в месте 
 дает распределение магнитной индукции
дает распределение магнитной индукции  вдоль воздушного зазора машины:
вдоль воздушного зазора машины:

Радиальное тяговое напряжение (радиальное тяговое усилие на единицу площади) в воздушном зазоре пропорционально квадрату магнитного потока
Предполагая, что амплитуда высших гармоник значительно меньше, чем амплитуда основного колебания, это уравнение приводит к

что дает с помощью вышеприведенных соотношений следующее:
Это уравнение показывает наличие двух пульсирующих компонентов, имеющих частоты ωh1-ω1, ωh2+ω1, и двух вращающихся компонентов, имеющих частоты ωh1+ω1, ωh2-ω1. Пространственный порядок вращающихся компонентов равен 2p, где р представляет собой число пар полюсов. Как можно видеть в этом уравнении, можно уменьшить амплитуду этих компонентов за счет уменьшения амплитуд высших гармоник Bh1 или Bh2 или амплитуды основной гармоники B1.
Изменение основного колебания магнитного потока создается за счет изменения тока, образующего поток. Ток, образующий поток, представляет собой реактивный ток. Основное колебание магнитного потока может также аппроксимироваться отношением напряжения двигателя к частоте двигателя.
Изменение высших гармоник магнитного потока в двигателе может быть осуществлено путем изменения глубины модуляции, также упоминаемой как степень модуляции. Эта изменяемая глубина модуляции может быть выбрана таким образом, что она обуславливает сниженные высшие гармоники в магнитном потоке двигателя. Оказалось, что этот эффект может быть использован, чтобы уменьшить произведение основного колебания и высшей гармоники магнитного потока в двигателе таким образом, что шумы питаемого посредством инвертора двигателя уменьшаются. Другая возможность уменьшить высшие гармоники магнитного потока и, таким образом, возникающие шумы состоит в том, чтобы изменить частоту импульсов.
Таким образом, можно путем изменения магнитного потока в двигателе, уменьшить шумы, создаваемые двигателем. Например, уменьшение основного колебания потока в режиме частичной нагрузке может привести к тому, что произведение основного колебания и высшей гармоники или высших гармоник магнитного потока принимает меньшее значение, и, следовательно, шумы двигателя уменьшаются. До сих пор уменьшение основного колебания потока использовались только для снижения потерь двигателя в режиме частичной нагрузки. В противоположность снижению мощности потерь, наряду с уменьшением потока, также повышение магнитного потока и связанное с ним повышение глубины модуляции, в зависимости от рабочей точки двигателя и/или инвертора, может привести к снижению шума. Увеличение потока возможно, в частности, тогда, когда двигатель имеет соответствующие конструктивные резервы, так что железо не переходит в режим насыщения при увеличении магнитного потока. Кроме того, для снижения шумов также может быть увеличена частота импульсов, когда увеличение потока уменьшает ток двигателя.
При этом в качестве инверторов могут быть использованы инверторы, которые имеют промежуточный контур, и входное напряжение сначала преобразуется в напряжение постоянного тока в промежуточном контуре, прежде чем оно будет преобразовано обратно в напряжение переменного тока для питания двигателя. Для применения способа согласно изобретению также пригодны прямые инверторы, в которых не формируется никакое напряжение постоянного тока.
Способ согласно изобретению может выполняться для всех типов двигателей, питаемых инверторами, особенно для асинхронных машин и синхронных машин.
В предпочтительном варианте осуществления изобретения, магнитный поток в двигателе изменяется в зависимости от нагрузочного момента на двигателе. Для способа оказалось особенно предпочтительным осуществлять изменение магнитного потока тогда, когда двигатель и/или инвертор находится ниже своей максимальной производительности. Это состояние также называется режимом частичной нагрузки. Получаемые тогда степени свободы, например тепловые резервы, могут быть использованы для уменьшения шумов, что не обязательно повышает суммарные потери двигателя и/или инвертора. Тем не менее, увеличение потерь в инверторе и/или двигатель в пользу более низкого шума может быть допустимо.
В предпочтительном варианте осуществления изобретения, нагрузочный момент определяется из выходных токов инвертора. Так как эти параметры и математическая модель двигателя известны средству регулирования инвертора, они могут быть использованы простым способом для снижения шумов двигателя. Для этого, снижение шумов двигателя посредством изменения потока выполняется посредством самого средства регулирования инвертора. Так как ему известны требуемые значения выходных токов инвертора, изменение потока может осуществляться простым способом. При этом для регулирования предпочтительно можно использовать другие параметры, которые описывают состояние инвертора.
В качестве альтернативы, изменение потока также может быть задано с помощью отдельного устройства регулирования. Соответствующие значения, такие как выходные токи инвертора и/или целевые значения потока, тогда передаются между средством регулирования инвертора и отдельным устройством регулирования.
В предпочтительном варианте осуществления изобретения, в зависимости от числа оборотов двигателя, с помощью напряжения и/или тока в двигателе изменяется магнитный поток. При этом число оборотов может определяться с помощью соответствующего измерительного устройства, такого как, например, датчик числа оборотов двигателя. Также возможно, из параметров, которые известны инвертору и его средству регулирования инвертора, например, выходного напряжения или выходного тока, сделать вывод о числе оборотов двигателя. Это может быть осуществлено в простом случае из частоты одного из этих параметров. Эта частота отличается от числа оборотов двигателя в случае асинхронной машины из-за скольжения. Для осуществления способа, однако, оказалось, что значение частоты является уже достаточно точным. В качестве альтернативы, из параметров регулирования инвертора, а также из соответствующей модели двигателя может быть вычислено число оборотов двигателя.
При известной нагрузочной характеристике, при которой момент на валу двигателя зависит, по существу, от числа оборотов, можно обойтись без определения нагрузочного момента двигателя. Из сигнала числа оборотов можно достаточно точно определить нагрузочные соотношения и, тем самым, также рабочее состояние двигателя и/или инвертора, чтобы иметь возможность предпринять надлежащие меры для изменения потока, не приводя к эксплуатации двигателя в недопустимых рабочих состояниях, таких как перегрузка или насыщение.
В предпочтительном варианте осуществления настоящего изобретения, нагрузочный момент определяется с помощью характеристической кривой в зависимости от числа оборотов двигателя. Специальные рабочие машины, такие как насосы и компрессоры имеют определенную характеристику, которая может быть определена в виде характеристической кривой. Используя эту характеристику и соответствующее число оборотов двигателя или нагрузки, можно точно определить нагрузочный момент двигателя. Таким образом, рабочее состояние двигателя и/или инвертора может быть определено таким образом, чтобы предпринять соответствующее изменение потока для уменьшения уровня шума.
При этом характеристика может быть определена в автономном режиме и загружена в устройство регулирования. В качестве альтернативы или дополнительно, характеристика может также определяться во время работы двигателя и, при необходимости, сохраняться.
В предпочтительном варианте осуществления изобретения, частота импульсов инвертора изменяется. В области частичной нагрузки, оставшаяся производительность инвертора может быть использована для увеличения частоты импульсов. Эта мера, однако, вызывает больше потерь в инверторе. Тем не менее, это может, при оставшейся производительности инвертора, например, в области частичной нагрузки или на основе соответствующего конструирования с запасом инвертора, использоваться для увеличения частоты импульсов. Кроме того, например, увеличение потока может также осуществляться в режиме полной нагрузки, если двигатель при этом не переходит в режим насыщения. Связанное с этим уменьшение токов двигателя может использоваться для повышения частоты импульсов. Это проявляется в уменьшении высших гармоник магнитного потока, так что возникающие шумы уменьшаются. Поскольку оставшаяся производительность зависит, в том числе, от нагрузочного момента двигателя, оказалось полезным также осуществлять увеличение частоты импульсов в зависимости от нагрузочного момента двигателя.
Повышенная частота импульсов обуславливает лучшее приближение токов к синусоидальной временной характеристике. Тем самым высшие гармоники в токе и, тем самым, в магнитном потоке двигателя могут быть уменьшены. Связанные с этим более высокие потери преобразователя могут быть допустимыми в пользу более низких шумов двигателя.
В предпочтительном варианте осуществления изобретения, напряжение промежуточного контура инвертора изменяется. Отношение между выходным напряжением инвертора и напряжением промежуточного контура описывается как глубина модуляции инвертора. В зависимости от глубины модуляции и частоты импульсов, различные по высоте высшие гармоники генерируются в выходном напряжении и, тем самым, в выходном токе, который вызывает магнитный поток в двигателе. Путем изменения напряжения промежуточного контура, как увеличения, так и уменьшения, при том же выходном напряжении инвертора глубина модуляции изменяется. С помощью соответствующего изменения напряжения промежуточного контура, таким образом, глубина модуляции может регулироваться с помощью инвертора или его средства регулирования инвертора, который генерирует только низкий уровень высших гармоник. Эта глубина модуляции способствует тем самым уменьшению шум двигателя.
Далее изобретение будет подробно описано и пояснено с помощью примеров выполнения, представленных на чертежах, на которых показано следующее:
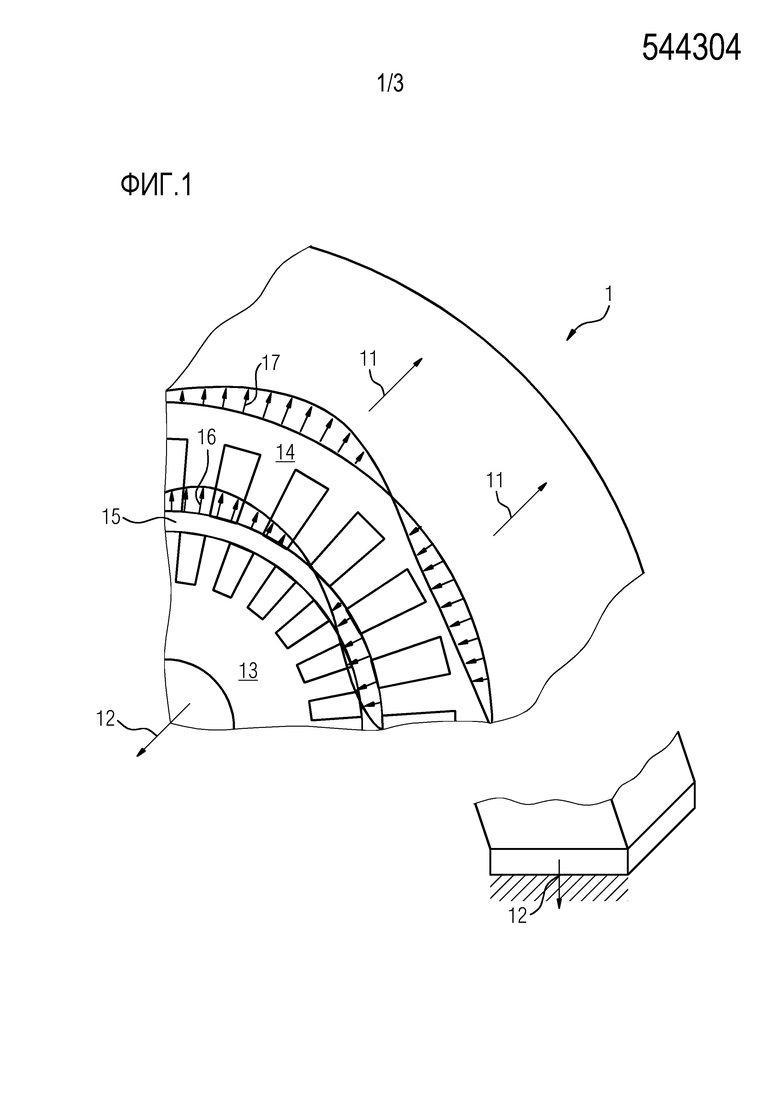
Фиг. 1 - поперечное сечение двигателя,
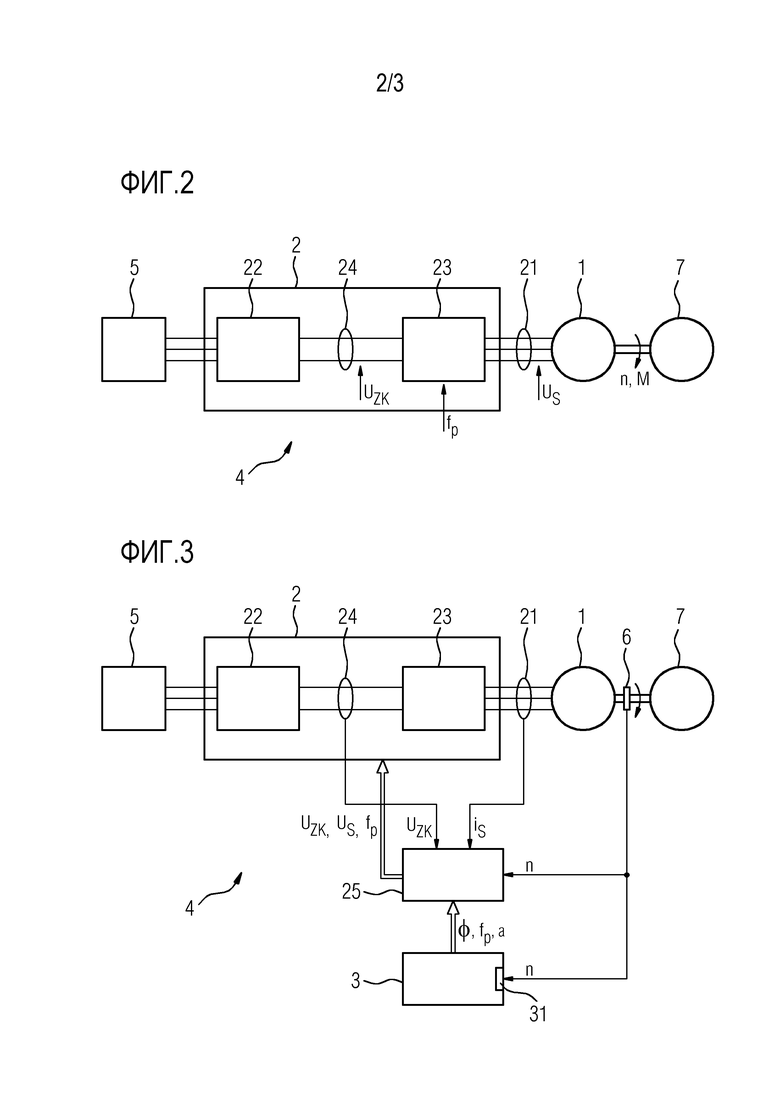
Фиг. 2 - структура системы привода,
Фиг. 3 - структура системы привода с регулированием,
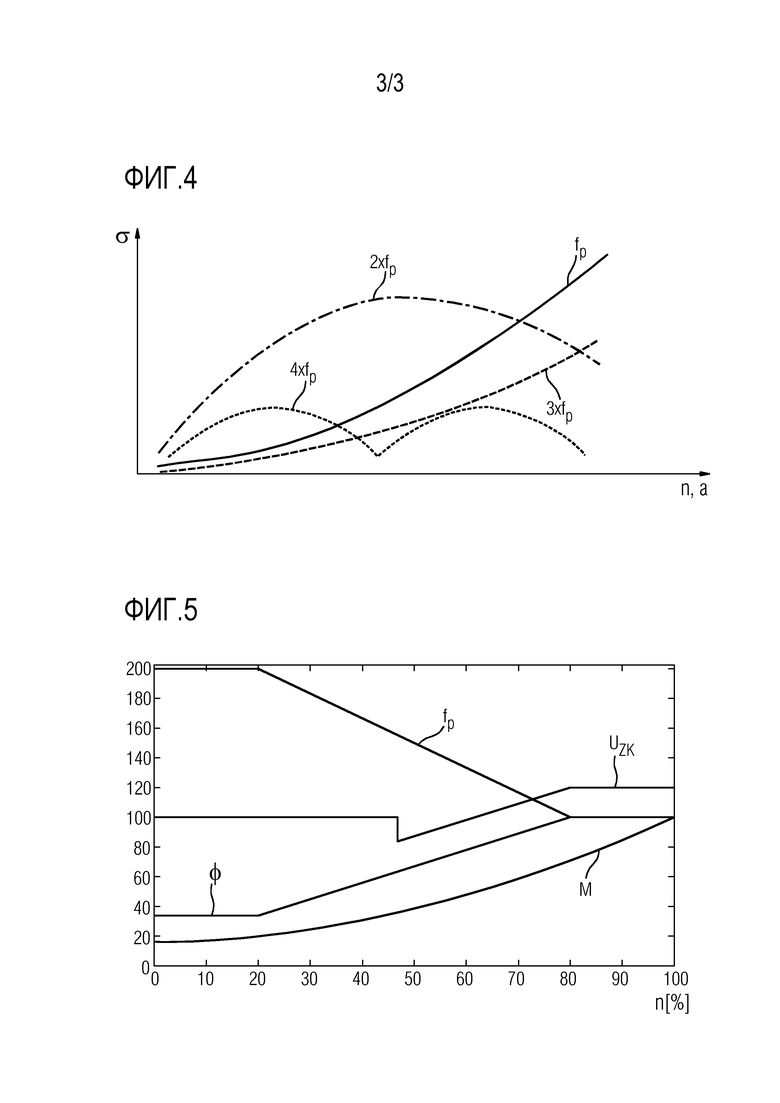
Фиг. 4 - зависимость высших гармоник радиального тягового усилия σ в различных частотных диапазонах (кратных значениях частоты импульсов) от глубины а модуляции для типичного способа модуляции (пространственно-векторной модуляции), и
Фиг. 5 - пример выполнения для изменения магнитного потока, частоты импульсов и напряжения промежуточного контура в зависимости от числа оборотов двигателя.
Фиг. 1 показывает фрагменты поперечного сечения двигателя 1. Двигатель 1 включает в себя статор 14 и ротор 13. Между статором 14 и ротором 13 находится воздушный зазор 15. Радиальное тяговое усилие 16 показано на этом чертеже с его основным колебанием и его высшими гармониками в форме стрелок. Это распределение радиального тягового усилия 16 по окружности вызывает радиальную деформацию 17 статора 14. Временное изменение радиального тягового усилия 16 в двигателе 1 вызывает временное изменение радиальной деформации 17. Радиальная деформация 17, таким образом, приводит к вибрации корпуса двигателя, так что возникают как воздушный звук 11, так и корпусной шум 12, которые могут восприниматься как шумы. Радиальная деформация 17 переходит от листового пакета статора 14 на корпус двигателя 1 и распространяется там как воздушный звук 11 через воздух. Если корпуса нет, то радиальная деформация 17 переходит непосредственно от листового пакета статора 11 в воздух как воздушный звук 11. Корпусной шум 12 передается, с одной стороны, через крепление двигателя 1, а также через вал двигателя.
На фиг. 2 показана структура системы 4 привода. Эта система 4 привода содержит сеть 5 электроснабжения, инвертор 2, двигатель 1 и нагрузку 7, подключенную к двигателю 1. Инвертор 2 трехфазным образом соединен с сетью 5 электроснабжения. Двигатель 1 трехфазным образом соединен с выходом инвертора 2. Нагрузка 7 соединена через вал двигателя с двигателем 1. Инвертор 2 содержит выпрямитель 22 и преобразователь постоянного напряжения в переменное (инвертор) 23. Выпрямитель 22 и преобразователь 23 постоянного напряжения в переменное соединены друг с другом посредством промежуточного контура 24. Выпрямитель 22 имеет задачу преобразовывать переменное напряжения сети 5 электроснабжения в напряжение постоянного тока. Из этого напряжения постоянного тока посредством преобразователя 23 постоянного напряжения в переменное на выходе инвертора 2 генерируется напряжение US. В качестве альтернативы, не показано в данном примере выполнения, преобразование напряжения сети электроснабжения может выполняться непосредственно в выходное напряжение инвертора без использования промежуточного контура. Этот тип инверторов называется прямым инвертором. Для него также применим способ согласно изобретению. С помощью амплитуды и частоты напряжения US на двигателе 1 устанавливается желательная рабочая точка. Соответствующее средство регулирования 25 инвертора, которое осуществляет установку рабочей точки и корректирует отклонения, ради ясности не представлено на фиг. 2. Еще одним характерным параметром для инвертора 2, в частности, преобразователя 23 постоянного напряжения в переменное, является частота fр импульсов, с которой преобразователь 23 постоянного напряжения в переменное переключает свой явно не показанный на чертеже переключатель таким образом, например, путем применения широтно-импульсной модуляции, чтобы сформировать соответствующее напряжение Us на выходе инвертора 2. Посредством напряжения Us формируются выходные токи 21 инвертора 2, которые формируют в двигателе 1 как магнитный поток Ф, так и крутящий момент М. Этот крутящий момент М передается через вал к нагрузке 7. Целью не изображенного здесь средства регулирования 25 инвертора является, например, регулирование числа n оборотов и момента M двигателя, чтобы достичь стабильной рабочей точки.
На фиг. 3 показана структура системы 4 привода, включающей в себя средство регулирования 25 инвертора и устройство 3 регулирования для изменения магнитного потока Ф и/или частоты fp импульсов и/или напряжения UZK промежуточного контура. Во избежание повторений делается ссылка на описание фиг. 2, а также введенные там ссылочные позиции. В дополнение к компонентам, которые показаны на фиг. 2, система 4 привода, показанная на фиг. 3, содержит средство 6 для определения числа n оборотов. Сигнал числа n оборотов передается от средства 6 для определения числа n оборотов на средство регулирования 25 инвертора и на вход 31 устройства 3 регулирования.
Устройство 25 регулирования может размещаться как в инверторе 2, так и вне инвертора 2. Устройство 3 регулирования также может размещаться в инверторе 2 или вне инвертора 2. Кроме того, устройство 3 регулирования может интегрироваться в средство регулирования 25 инвертора и, таким образом, составляет часть средства регулирования 25 инвертора. Задачей средства регулирования 25 инвертора является генерировать целевое значение для выходного напряжения инвертора 2. Для этого, в частности, могут использоваться такие параметры, как напряжение UZK промежуточного контура, выходные токи iS выпрямителя 21 и число n оборотов выпрямителя. Устройство 3 регулирования также служит для уменьшения шумов, вызванных двигателем 1. Для этого, в зависимости от числа n оборотов, целевое значение магнитного потока Ф изменяется таким образом, что шумы двигателя 1 уменьшаются. Как уже описано, это осуществляется тем, что магнитный поток Φ регулируется таким образом, что основное колебание магнитного потока, умноженное на высшие гармоники магнитного потока Ф, принимает по возможности меньшее значение. Кроме того, частота fp импульсов и напряжение UZK промежуточного контура могут быть изменены таким образом, что они также снижают вышеописанное произведение основного колебания и высшей гармоники магнитного потока. Для этого, соответствующие целевые значения от устройства 3 регулирования передаются на средство регулирования 25 инвертора. Средство регулирования 25 инвертора может затем путем обращения к переключающим операциям переключателей (силовых полупроводников) преобразователя 23 постоянного напряжения в переменное устанавливать соответствующую рабочую точку с измененным магнитным потоком Φ и, при необходимости, с измененной частотой fp импульсов. За счет обращения к переключающим операциям выпрямителя 22 может устанавливаться измененное напряжение UZK промежуточного контура. Таким образом, посредством инвертора 2 может осуществляться изменение магнитного потока Ф, частоты fp импульсов и напряжения UZK промежуточного контура. Эта возможность вмешательства изменяет соответствующие физические параметры в двигателе 1 и инверторе 2
Фиг. 4 показывает зависимость высших гармоникам радиального тягового усилия σ в различных частотных диапазонах (кратных значениях частоты импульсов) от глубины а модуляции для обычного способа модуляции (пространственно-векторной модуляции). Здесь, по меньшей мере до номинального числа оборотов, глубина а модуляции и число n оборотов пропорциональны друг другу. Выше номинального числа оборотов затем возникает ослабление поля. Можно видеть, что, в зависимости от глубины модуляции, различные высшие гармоники при кратных значениях частоты импульсов могут усиливаться или ослабляться. При этом существуют частотные диапазоны, в которых увеличение глубины модуляции (например, путем уменьшения напряжения промежуточного контура) вызывает уменьшение высших гармоник радиального тягового усилия σ (например, для высших гармоник с удвоенной частотой импульсов). Например, когда двигатель 1 является чувствительным в диапазоне удвоенной частоты импульсов, глубина а модуляции должна увеличиваться, чтобы осуществить снижение уровня шума. Если двигатель является чувствительным в области простой частоты импульсов, то глубина а модуляции должна поддерживаться по возможности низкой. Это сопровождается уменьшением шума двигателя 1.
На фиг. 5 показан пример выполнения способа для уменьшения шума двигателя 1. При этом применении, нагрузочный момент М в зависимости от числа n оборотов известен. На основе относительно низкого крутящего момента М при низких числах оборотов поток Ф снижается. Только при высоких числах оборотов он достигает своего 100%-значения. Сопутствующий низкому магнитному потоку Φ меньший ток, кроме того, дает возможность повысить частоту fp импульсов без перегрузки инвертора 2, в частности, термической перегрузки. В примере выполнения, частота импульсов составляет 200% при малых числах оборотов. С увеличением нагрузки и, таким образом, при более высоких потерях, как в инверторе 2, так и двигателе 1, частота fp импульсов снова уменьшается. При максимальном числе оборотов, при котором также максимальный момент М должен обеспечиваться двигателем, как магнитный поток Ф, так и частота fp импульсов находятся на номинальном значении 100%. Кроме того, как показано здесь в этом примере выполнения, напряжение UZK промежуточного контура в зависимости от числа n оборотов может быть отрегулировано таким образом, чтобы добиться снижения шума двигателя.
Хотя изобретение подробно проиллюстрировано и описано с помощью предпочтительных примеров выполнения, однако изобретение не ограничено раскрытыми примерами, и другие варианты могут быть получены на их основе специалистом в данной области без отклонения от объема защиты настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ активного гашения магнитного шума электродвигателя и устройство для его осуществления | 2021 |
|
RU2769972C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ СУДОВОГО ПРИВОДНОГО ДВИГАТЕЛЯ, ПИТАЕМОГО ИНВЕРТОРОМ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ, А ТАКЖЕ СИСТЕМА СУДОВОГО ПРИВОДА | 2011 |
|
RU2514383C1 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ПРИВОДА С АСИНХРОННЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2222097C2 |
| СПОСОБ СНИЖЕНИЯ ВИБРАЦИИ ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2234184C1 |
| Способ регулирования мощности инвертора | 1979 |
|
SU788305A1 |
| Последовательный инвертор для индукционного нагрева | 1982 |
|
SU1120468A1 |
| Способ регулирования мощности инвертора,питающего несколько резонансных нагрузок | 1981 |
|
SU955456A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ | 2014 |
|
RU2556874C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ НАГРУЗКИ ПРЕИМУЩЕСТВЕННО ИНДУКТИВНОГО ТИПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2402145C1 |
| СПОСОБ ПРОВЕРКИ ФУНКЦИОНИРОВАНИЯ ВАКУУМНОГО ВЫКЛЮЧАТЕЛЯ ТЯГОВОГО ВЫПРЯМИТЕЛЯ ТОКА | 2010 |
|
RU2496176C1 |
Изобретение относится к области электротехники и может быть использовано в двигателях, питаемых с помощью инвертора. Техническим результатом является уменьшение шумов двигателя. В способе снижения шума двигателя (1), питаемого с помощью инвертора (2), для уменьшения возникновения шумов предложено изменять магнитный поток (Φ) в двигателе (1) таким образом, что произведение основного колебания магнитного потока (Ф) на высшую гармонику магнитного потока (Ф) уменьшается. Кроме того, предложено дополнительно или альтернативно изменять напряжение (Us) на двигателе (1) и/или частоту (fp) импульсов и/или напряжение (UZK) промежуточного контура. 3 н. и 7 з.п. ф-лы, 5 ил.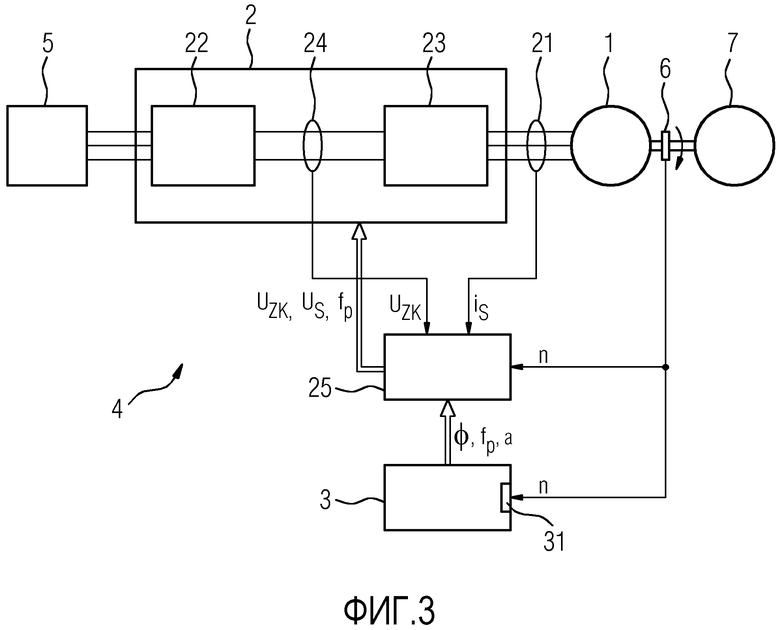
1. Способ снижения шумов двигателя (1), питаемого с помощью инвертора (2), причем магнитный поток (Φ) в двигателе (1) изменяют таким образом, что произведение основного колебания магнитного потока (Ф) на высшую гармонику магнитного потока (Ф) уменьшается, при этом для изменения высших гармоник магнитного потока (Ф) изменяют глубину модуляции и/или частоту (fp) импульсов инвертора (2).
2. Способ по п. 1, причем магнитный поток (Φ) в двигателе (1) изменяют в зависимости от нагрузочного момента (М) в двигателе (1).
3. Способ по п. 1 или 2, причем нагрузочный момент (М) определяют из выходных токов (21) инвертора (2).
4. Способ по любому из пп. 1-3, причем магнитный поток (Φ) в двигателе (1) изменяют в зависимости от числа (n) оборотов двигателя (1) посредством напряжения (Us) и/или тока (is) на двигателе (1).
5. Способ по п. 4, причем нагрузочный момент (М) определяют с помощью характеристической кривой в зависимости от числа (n) оборотов двигателя (1).
6. Способ по любому из пп. 1-5, причем глубину модуляции увеличивают таким образом, что магнитный поток (Ф) увеличивается.
7. Способ по любому из пп. 1-6, причем изменяют напряжение (UZK) промежуточного контура инвертора (2).
8. Устройство (3) регулирования для снижения шумов двигателя (1), питаемого с помощью инвертора (2), посредством способа согласно любому из пп. 1-6, причем устройство (3) регулирования может соединяться с инвертором (2) таким образом, что может передаваться целевое значение для магнитного потока (Ф) двигателя (1) и что может передаваться целевое значение для частоты (fp) импульсов и/или для напряжения (UZK) промежуточного контура.
9. Устройство (3) регулирования по п. 8, причем устройство (3) регулирования имеет вход (31), на который может подаваться сигнал о числе (n) оборотов двигателя (1).
10. Система (4) привода, содержащая
- устройство (3) регулирования по п. 8 или 9,
- инвертор (2) и
- двигатель (1),
причем двигатель (1) посредством инвертора (2) может соединяться с сетью (5) электроснабжения,
причем устройство (3) регулирования соединено с инвертором (2) таким образом, чтобы передавать по меньшей мере одно целевое значение на инвертор (2), и при этом устройство (3) регулирования соединено со средством (6) для определения числа (n) оборотов двигателя (1).
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПРИ НЕСИНУСОИДАЛЬНОМ НАПРЯЖЕНИИ ПИТАНИЯ | 1996 |
|
RU2094941C1 |
| СПОСОБ СНИЖЕНИЯ ВИБРАЦИИ ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2234184C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРОВОЗА | 2011 |
|
RU2464621C1 |
| DE 10336068 A1, 10.03.2005 | |||
| DE 60318232 T2, 11.12.2008 | |||
| US 8816616 B2, 26.08.2014 | |||
| EP 2704306 A2, 05.03.2014 | |||
| CN 1492576 A, 28.04.2004 | |||
| US 604399 A1, 28.03.2000. | |||

