Область техники
Изобретение относится к области силовой электроники, в частности, к способу управления конвертором для электрической системы, к элементу программы для управления конвертором, к считываемому компьютером носителю, к контроллеру для конвертора и конвертору.
Уровень техники
Конверторы применяются в электрических системах при преобразовании входного напряжения, которое может быть одним напряжением постоянного тока или одним напряжением переменного тока одной частоты, в выходное напряжение, которое может быть другим напряжением постоянного тока или другим напряжением переменного тока другой частоты.
Например, если конвертор используется как инвертор, входное напряжение может быть напряжением линии постоянного тока, а выходное напряжение может использоваться для питания электрической нагрузки, такой как электрическая машина, работающая от электрического тока. Кроме того, конвертор может использоваться как выпрямитель, в этом случае он соединяется с электрической сетью и преобразует входное напряжение переменного тока в напряжение постоянного тока.
Почти все конверторы содержат полупроводниковые переключатели, которые формируют выходное напряжение, например, для каждой фазы электрической системы. Переключатели управляются контроллером, который определяет следующий переход на переключение и направляет этот переход на переключатели. Переход на переключение может иметь набор коммутационных состояний (т.е. открыт или закрыт соответствующий переключатель) и момент времени, при котором эти коммутационные состояния подаются на конвертор.
Существует несколько средств для формирования контроллером таких переходов на переключение.
Например, для управления внутренними характеристиками электрической системы при формировании переходов на переключение может использоваться модель прямого управления с прогнозированием вращающего момента (MPDTC). Внутренними характеристиками электропривода могут быть вращающий момент и электромагнитные потоки в двигателе. В MPDTC последовательности переключений, т.е. последовательности переходов на переключение выше определенного интервала переключения оптимизируются в реальном времени. Например, соответствующий вращающий момент, магнитный поток статора и траектория нейтральной точки могут вычисляться, используя внутреннюю модель машины, а затем может быть выбрана оптимальная последовательность переключений, которая характеризует наименьшие потери при переключениях или наименьшую частоту переключений. Затем первый переход на переключение из последовательности переключений может подаваться в конвертор, и следующая последовательность может быть оптимизирована онлайн.
Прямое управление вращающим моментом может обеспечить очень быструю реакцию на вращающий момент, но это может привести к относительно высоким значениям гармонических искажений токов статора и электромагнитного вращающего момента управляемой машины для заданного значения частоты переключений или потерь при переключении.
Другое средство заключается в использовании оптимизированных последовательностей импульсов (OPPs). Вообще оптимизированная последовательность импульсов может быть последовательностью переходов на переключение, которая оптимизирована относительно требуемого уровня оптимизации. Например, оптимизированные последовательности импульсов могут быть рассчитаны в режиме офлайн для всех индексов модуляции и частот переключения двигателя или какой-либо другой физической системы, которая работает в качестве нагрузки конвертора, и может быть оптимизирована таким образом, что общее искажение тока для заданной частоты переключений будет минимальной. Контроллер может выбирать оптимизированную последовательность импульсов из таблицы поиска, в которой хранятся оптимизированные последовательности импульсов, и подавать переходы на переключение выбранной оптимизированной последовательности импульсов на конвертор. Однако использование оптимизированных последовательностей импульсов может привести к очень длительным переходным режимам и к гармоническим искажениям токов статора при изменении рабочей точки: даже совсем малые изменения рабочей точки могут привести к сравнительно высоким искажениям гармонического тока. Такими искажениями гармоник могут считаться как токовые искажения или, что то же самое, так и искажения магнитного потока.
Раскрытие изобретения
Целью изобретения является создание конвертора с быстрой реакцией на управляющее воздействие, в частности с быстрой реакцией на вращающий момент, и малым искажением высшими гармониками.
Эта цель достигается в соответствии с содержанием независимых пунктов формулы изобретения и нижеследующих вариантов осуществления изобретения. Кроме того, типичные варианты осуществления изобретения очевидны из зависимых пунктов формулы изобретения и последующего описания.
Первой особенностью изобретения является способ управления конвертором для электрической системы. Электрической системой может быть электрическая машина, например двигатель или генератор, может быть электросеть или какая-либо другая электрическая нагрузка.
В соответствии с вариантом реализации изобретения электрической системой может быть многофазная система, т.е. система, содержащая не одну, а несколько фаз, в частности три фазы.
В соответствии с вариантом осуществления изобретения конвертор предназначен для создания, по меньшей мере одного выходного напряжения из (по меньшей мере одного) входного напряжения с помощью переключателей, например полупроводниковых переключателей. Например, конвертор может быть частью непрямого конвертора и может быть приспособлен для преобразования входного напряжения постоянного тока в несколько фаз выходного напряжения. Полупроводниковые переключатели конвертора могут быть мощными полупроводниковыми переключателями, и конвертор может быть приспособлен для работы с токами в диапазоне до 10 кА и напряжениями в диапазоне между 1 кВ и 35 кВ.
В соответствии с вариантом осуществления изобретения способ содержит этап (а) определения последовательности переключений для конвертора, основанный на реальном состоянии электрической системы. Последовательность переключений может содержать последовательность переходов на переключение конвертора, где каждый переход на переключение имеет время перехода. Обычно переход на переключение может иметь момент времени перехода, т.е. время перехода или момент переключения, и уровень напряжения. Момент времени может указывать, когда конвертор должен формировать переход на переключение так, чтобы коммутационные состояния переключателей были такими, чтобы конвертор формировал уровень напряжения перехода на переключение.
Например, если конвертор является двухуровневым инвертором, то выходное напряжение инвертора может быть 0 и + VDC и инвертор имеет уровни напряжения 0 и +1, где VDC является напряжением линии постоянного тока. Если инвертор является трехуровневым конвертором, то выходные напряжения могут быть -VDC, 0,+VDC с уровнями напряжения -1, 0,+1.
Момент времени перехода на переключение может быть задан углом переключения. Затем момент времени перехода на переключение может быть получен из угла переключения при помощи частоты тока электрической системы.
В многофазной системе выходное напряжение может быть многофазным напряжением, и переходы на переключение могут иметь уровни напряжения для каждой из фаз выходного напряжения.
Примерами реального состояния электрической системы являются мгновенные значение тока или напряжения привода или сети, рассчитанные магнитные потоки в системе, например рассчитанный магнитный поток ротора и рассчитанный магнитный поток статора, и рассчитанный вращающий момент электрического двигателя. Далее примерами являются напряжение линии постоянного тока и активная и реактивная мощности нагрузки. Следует отметить, что даже в том случае, когда электрическая система не содержит машину, например, в случае когда электрическая система является электрической сетью, виртуальные магнитные потоки, например виртуальный магнитный поток ротора и виртуальный магнитный поток статора, могут быть определены с помощью импеданса сети, фильтра и/или трансформатора между конвертором и сетью. Эти виртуальные магнитные потоки могут использоваться для расчета виртуального вращающего момента.
В соответствии с вариантом осуществления изобретения расчет величин фактического или текущего состояния электрической системы может основываться на модели системы. В частности, токи и напряжения системы, например токи и напряжения в машине, могут быть измерены, и исходя из этого могут быть рассчитаны или определены магнитные потоки с помощью внутренней модели машины.
В соответствии с вариантом осуществления изобретения способ содержит этап (b) преобразования последовательности переключений путем изменения, по меньшей мере, одного времени перехода переключения из последовательности переключений так, чтобы искажение магнитного потока, основанное на разнице между расчетным значением магнитного потока электрической системы и опорным значением магнитного потока электрической системы, было устранено или минимизировано.
Может оказаться, что последовательность переключений получена таким образом, что достигается определенный уровень оптимизации, например, минимизировано общее искажение высшими гармониками (THD). Однако при вычислении оптимизации в отношении электрических систем делались определенные допущения. Например, последовательность переключений определялась таким образом, что общее искажение высшими гармониками электрической системы минимизируется при условии, что электрическая система работает в установившемся режиме.
Чтобы компенсировать эти искажения, последовательность переключений может быть изменена таким образом, что компенсируются искажения магнитного потока. Например, искажением магнитного потока может быть разница между расчетным магнитным потоком и опорным магнитным потоком. Расчетный магнитный поток может быть определен исходя из действительного состояния электрической системы, например, опорный магнитный поток уже определен при формировании последовательности переключений; а последовательность переключений может быть изменена путем передвижения времени перехода переключений, т.е. изменяются только времена перехода, но не уровень напряжения переходов на переключение. Таким образом, искажения магнитного потока могут компенсироваться, и уровень оптимизации, при котором формируется последовательность переключений, может быть почти достигнут при помощи преобразованной последовательности переключений.
В соответствии с вариантом осуществления изобретения способ содержит этап (с) подачи преобразованной последовательности переключений в конвертор. Например, контроллер конвертора содержит память, где хранится действительная последовательность переключений, которая периодически подается на конвертор. Когда определена или рассчитана преобразованная последовательность переключений, действительная последовательность переключений может быть заменена преобразованной последовательностью переключений.
В итоге можно сказать, что суть изобретения состоит в том, что конвертор электрической системы управляется таким образом, что последовательности переключений, которые определены в режиме офлайн по отношению к определенному уровню оптимизации, модифицируются (преобразуются) на втором этапе так, чтобы последовательность переключений могла быть затем оптимизирована в реальном времени за счет корректирования искажения магнитного потока, что может явиться результатом определенных допущений, на которых основана первая оптимизация последовательности переключений.
Другими причинами искажений магнитного потока могут являться неточности модели машины или модели сети или флуктуации на линии постоянного тока, что невозможно точно спрогнозировать. Во время работы в переходном режиме OPPs могут изменяться, поскольку эти переходные состояния невозможно предсказать или вычислить, а также спланировать. Операции в переходном режиме могут содержать переключение между разными OPPs, например от ОРР с числом пульсации d=6 до ОРР с числом пульсации d=5. В этих случаях также может появиться искажение магнитного потока, которое необходимо компенсировать.
В соответствии с изобретением на этапе (d) время перехода изменяется путем прибавления сдвига по времени ко времени перехода, где сдвиг по времени определяется так, чтобы искажение магнитного потока, по меньшей мере, частично компенсировалось. Обычно магнитный поток, связанный с зависящим от времени напряжением, пропорционален интегралу по времени зависящего от времени напряжения. Следовательно, искажение магнитного потока может быть скомпенсировано путем прибавления сдвига по времени ко времени перехода, т.е. путем сдвига (перемещения вперед или задержки) времени перехода. Время перехода или ряд времен перехода может быть сдвинут по времени так, чтобы преобразованная последовательность переключений имела магнитный поток, который приблизительно равен опорному магнитному потоку, т.е. так, чтобы искажение магнитного потока компенсировалось.
Следует отметить, что в многофазной системе каждая фаза системы может иметь разные искажения магнитного потока, т.е. существует искажение магнитного потока в каждой фазе, а искажение магнитного потока представляет собой вектор.
Обычно не только одно время перехода будет изменяться, а по меньшей мере несколько времен перехода или все времена перехода последовательности переключений могут быть изменены. В этом случае возможно, что времена перехода либо модифицируются путем прибавления одинакового сдвига по времени, либо путем прибавления различных сдвигов по времени (сдвигов), т.е. каждое время перехода может иметь соответствующий сдвиг по времени, который отличается от сдвига по времени другого времени перехода. Прибавление одинакового сдвига по времени к нескольким временам перехода может упростить вычисления.
В соответствии с вариантом осуществления изобретения полный сдвиг по времени получается из искажения магнитного потока. В случае многофазной системы полный сдвиг по времени может быть для каждой фазы системы. Полный сдвиг по времени (по меньшей мере, частично) может распределяться на ряд сдвигов по времени для различных времен перехода, так что соблюдаются ограничения на последовательность переключений.
Обычно невозможно произвольно изменять времена перехода последовательности переключений. Например, может быть наложено ограничение, что порядок переходов на переключение не должен модифицироваться. Следовательно, величина сдвига по времени (который также может быть отрицательным) одной последовательности переключений может быть ограничена таким образом, что переход на переключение не следует после своих соседних переходов на переключение. Кроме того, могут существовать нижний и верхний пределы времен перехода, например, время первого перехода не может быть меньше, чем действительный момент времени.
В соответствии с вариантом реализации изобретения сдвиги по времени определяются таким образом, что они минимизируются и соблюдаются ограничительные условия на последовательность переключений. В том случае, когда сдвиги по времени минимизированы, т.е. сдвиги по времени выбраны таким образом, что максимальные значения сдвигов по времени минимальны, то может быть, что уровень оптимизации, который должен достигаться оптимизацией непреобразованной последовательности переключений, также может быть достигнут посредством преобразованной последовательности переключений. Например, такая минимизация сдвигов по времени может достигаться при помощи задач квадратичного программирования, так как минимизация искажения магнитного потока и минимизация сдвигов по времени чаще всего квадратичная для сдвигов по времени при использовании квадратичных коррекций в отношении искажения магнитного потока и сдвигов по времени. При допущении, что существует только один сдвиг по времени для времен переключения одной фазы, квадратичная программа может быть составлена, как так называемая действующая постоянная квадратичная программа с только несколькими итерациями, например двумя. Это может привести к простой процедуре вычисления оптимизации.
В соответствии с вариантом осуществления изобретения сдвиг по времени для первого перехода переключения последовательности переключений определяется так, чтобы максимально корректировались искажения магнитного потока и соблюдались ограничительные условия относительно последовательности переключений. Это может выполняться с помощью так называемого алгоритма апериодического управления. Другими словами вычисляется полный сдвиг по времени, и этот сдвиг по времени распространяется на первые переходы переключений последовательности переключений. В случае когда электрическая система является многофазной, апериодический алгоритм далее может быть упрощен в смысле вычислений путем сокращения промежутка времени, в течение которого изменяется последовательность переключений. В данном случае промежуток времени может определяться как число переходов переключений в начальной части последовательности переключений, которая может быть преобразована с помощью процедуры оптимизации. Промежуток времени может выбираться таким образом, чтобы только две фазы имели переходы переключения в пределах этого промежутка. В этом случае вычисление полного сдвига по времени может упроститься даже больше.
В соответствии с вариантом осуществления изобретения на этапе (b) по меньшей мере два перехода переключения с равными временами перехода вносятся в последовательность переключений прежде, чем последовательность переключений преобразуется. Эти два перехода переключения могут иметь равные уровни напряжения и, следовательно, не оказывают никакого воздействия на магнитный поток, который пропорционален интегралу по напряжению и, следовательно, не влияет на выходное напряжение и состояние электрической системы. Однако алгоритм оптимизации может перемещать времена двух переходов переключений, и в том случае, когда два перехода переключения имеют различные времена перехода в преобразованной последовательности переключений, создается дополнительный импульс. Путем внесения этих по меньшей мере двух переходов переключений преобразованная последовательность переключений может быть преобразована и далее.
В соответствии с вариантом осуществления изобретения на этапе (а) последовательность переключений может быть выбрана на основании заранее вычисленных последовательностей переключений. Например, заранее вычисленные последовательности переключений хранятся в энергонезависимом или в энергозависимом запоминающем устройстве контроллера конвертора и считываются с этого запоминающего устройства на основании определенного критерия выбора. Например, заранее вычисленные последовательности переключений могут быть так называемыми оптимизированными структурами импульсной последовательности (ОРР). Оптимизированная структура импульсной последовательности может быть заранее вычисленной со ссылкой на определенный критерий оптимизации, например низкое общее искажение высшими гармониками (THD). Оптимизированные структуры импульсной последовательности могут храниться в таблице со ссылкой на индекс модуляции и число пульсаций. Например, оптимизированные структуры импульсной последовательности не нуждаются в хранении в течение полного периода 360°, а только в течение одной четверти полного периода. Структуры импульсной последовательности, которые имеют четвертьволновую симметричность, дают повышение только нечетным незначительным гармоникам, т.е. гармоникам порядка 5, 7, 11, 13, 17, 19, когда подаются на трехфазную систему. Из этого четверть периода может формироваться импульсная последовательность одной фазы в пределах всего периода 360°, а последовательность переключений для многофазной системы может формироваться путем сдвига импульсной последовательности одной фазы соответствующим сдвигом по фазе.
В соответствии с вариантом осуществления изобретения опорный магнитный поток определяется как вектор в прямоугольной системе координат. В многофазной системе магнитные потоки являются векторами (например, пространственными векторами в случае трехфазной системы). Однако, например, в трехфазной системе присутствуют только две степени свободы для различных напряжений, так как третье измерение, нейтральная ось или ось синфазного режима не возбуждает ток во включенной по схеме звезда нагрузке, у которой нейтральная точка звезды не подключена. Это обстоятельство может быть использовано для преобразования трехмерных векторов магнитного потока или в общем случае всякий вектор системы в двухмерный вектор. Примером такой ортогональной системы координат является система координат (ά-β). В этом случае (ά -β)-преобразование может рассматриваться как проекция трехфазных величин (например, напряжения, токов компонентов вектора магнитного потока) на две стационарные оси, ось ά и ось β.
В соответствии с вариантом осуществления изобретения угол вектора опорного магнитного потока основывается на сумме угла вектора расчетного магнитного потока статора и опорного угла, где опорный угол определяется исходя из действительного состояния электрической системы. Как уже говорилось, действительное состояние системы может характеризоваться расчетным магнитным потоком ротора и расчетным магнитным потоком статора, расчетным вращающим моментом, который пропорционален векторному произведению магнитного потока статора и магнитного потока ротора, а также опорным вращающим моментом. Так как эти два вектора магнитного потока должны соответствовать вышеупомянутому векторному произведению, может быть определен опорный угол между двумя векторами магнитного потока.
В соответствии с вариантом осуществления изобретения опорный угол может быть установлен с помощью замкнутой системы автоматического управления с обратной связью между расчетной величиной действительного состояния электрической системы и соответствующей опорной величиной. Например, расчетной величиной может быть расчетный вращающий момент вращающейся электрической машины и соответствующей опорной величиной может быть опорный вращающий момент.
В соответствии с вариантом осуществления изобретения модуль, т.е. длина, вектора магнитного потока, например вектора опорного магнитного потока, определяется исходя из угла вектора магнитного потока и последовательности переключений. Например, на первом этапе вычисляется только угол вектора опорного магнитного потока, а на втором этапе определяется длина вектора магнитного потока. Модуль вектора магнитного потока может быть вычислен с помощью интегрирования зависящего от времени напряжения, определяемого последовательностью переключений; верхним пределом этого интегрирования может быть угол вектора магнитного потока, который уже определен на первом этапе. Это вычисление может быть произведено в реальном времени, или величина магнитного потока может храниться в таблице поиска и может быть предварительно вычислена для каждой оптимизированной импульсной последовательности.
Однако возможно, чтобы вектор магнитного потока имел постоянную величину, что может обеспечить относительно точный расчет.
В соответствии с вариантом осуществления изобретения электрическая система содержит вращающуюся электрическую машину, т.е. двигатель или генератор. В этом случае искажение магнитного потока может быть искажением магнитного потока статора, расчетный магнитный поток может быть расчетным магнитным потоком статора и опорный магнитный поток может быть опорным магнитным потоком статора. Как уже сказано, расчетные величины могут рассчитываться таким образом, что сначала измеряются токи и напряжения вращающейся электрической машины и что эти измеренные величины подаются в модель электрической машины. Модель электрической машины может храниться в контроллере конвертора, который принимает измеренные величины в качестве входных величин, и выдает расчетные величины в качестве выходных величин.
В соответствии с вариантом осуществления изобретения на этапе (а) последовательность переключений может быть выбрана на основании индекса модуляции конвертора, причем индекс модуляции показывает соотношение между амплитудой входного напряжения конвертора и амплитудой выходного напряжения конвертора. Как правило, таким путем выбираются оптимизированные импульсные последовательности.
В соответствии с вариантом осуществления изобретения индекс модуляции устанавливается с помощью контроллера с обратной связью между расчетной величиной действительного состояния системы и соответствующей опорной величиной. Например, расчетной величиной может быть расчетный магнитный поток статора или расчетный магнитный поток ротора вращающейся электрической машины, а опорной величиной может быть опорный магнитный поток статора или опорный магнитный поток статора вращающейся электрической машины.
Следующее положение изобретения относится к элементу программы (компьютерной программы) для управления конвертором, который будучи выполненным с помощью по меньшей мере одного процессора, предназначен для выполнения этапов способа, как описано выше и в дальнейшем. Например, процессор может быть процессором контроллера.
Следующее положение изобретения касается компьютерного программоносителя, в котором хранится элемент программы.
Компьютерный программоноситель может являться гибким диском, жестким диском, запоминающим устройством с универсальной последовательной шиной (USB), запоминающим устройством с произвольной выборкой (RAM), постоянным запоминающим устройством (ROM), стираемая программируемая постоянная память (EPROM) или флеш-память (FLASH). Также компьютерный программоноситель может быть сетью передачи данных, например, Интернетом, который позволяет загрузку по линии связи кода программы.
Также имеется возможность, чтобы данный способ выполнялся программируемой вентильной матрицей (FPGA). Вообще алгоритм выполнения данного способа может быть реализован с помощью любого аппаратного средства, включая цифровые процессоры (DSPs) и программируемые вентильные матрицы (FPGAs).
Следующее положение изобретения относится к контроллеру для управления конвертором, где контроллер предназначен для выполнения данного способа, как описано выше и в дальнейшем. Контроллер может содержать процессор и память с элементом программы, подлежащей выполнению на процессоре. В качестве варианта контроллер может содержать FPGA.
Еще одно положение изобретения относится к конвертору.
В соответствии с вариантом осуществления изобретения конвертор содержит схему конвертора с переключателями, причем схема конвертора служит для создания выходного напряжения для, по меньшей мере, одной фазы. В случае инвертора выходное напряжение может соответствовать различным уровням напряжения, создаваемого коммутационным состоянием переключателей.
В соответствии с вариантом осуществления изобретения конвертор содержит контроллер для управления переключателями, как описано выше и далее.
Следует иметь в виду, что характерные особенности способа, описание которого приведено выше и далее, могут быть присущи контроллеру или конвертору, описанному выше и далее.
Если технически возможно, но в явной форме не упомянуто, то также комбинации вариантов осуществления изобретения, описанных выше и далее, могут быть вариантами осуществления способа и устройств.
В заключение можно сказать, что с помощью описанного выше и далее способа управления можно выбирать положения переключателя конвертора таким образом, что достигаются упомянутые цели.
Характеристики машины, нагрузки или сети могут управляться по их опорным величинам. Что касается электрической машины, то эти характеристики содержат электромагнитный вращающий момент, а также модуль и пространственную ориентацию вектора магнитного потока статора. В отношении конвертора, соединенного с сетью, этими характеристиками могут являться активная и реактивная мощность или напряжение линии постоянного тока и реактивная мощность (или ток).
В установившемся режиме работы и при заданной частоте переключений полупроводниковых устройствах (т.е. переключателях) конвертора может быть достигнуто очень слабое искажение тока, близкое к расчетному нижнему пределу. Столь малое искажение тока можно получить с помощью вычисления OPPs офлайн таким образом, чтобы минимизировать общее искажение высшими гармониками (THD) тока для заданной частоты переключений или, что то же самое, для заданного количества фактов переключения за один основной период вращения пространственного вектора напряжения статора (число пульсаций).
Во время переходного режима работы и при наличии внешних возмущений характеристики машины или сети могут управляться очень быстро. В частности, например, во время этапа изменения вращающего момента нагрузки можно добиться очень малого времени реакции, что аналогично этому же самому, достигнутому с помощью прямого управления вращающим моментом. То же самое применимо к случаю при переключении между разными OPPs. Обычно такие показатели находятся в диапазоне нескольких мс.
Эти и другие характерные особенности будут очевидны и объяснены со ссылкой на варианты осуществления изобретения, описанные ниже.
Краткое описание чертежей
Более подробно сущность изобретения объясняется в нижеследующем описании со ссылкой на примеры вариантов осуществления изобретения, которые иллюстрированы прилагаемыми чертежами.
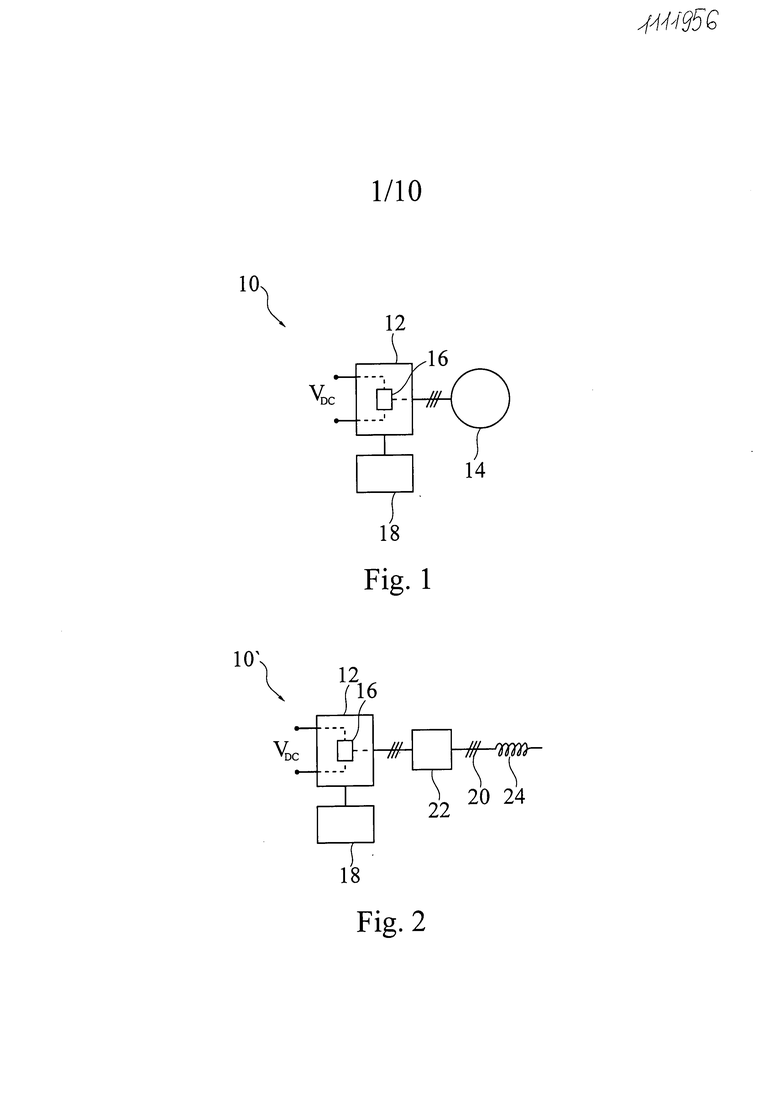
Фиг.1 представляет схематически электрическую систему в соответствии с вариантом осуществления изобретения.
Фиг.2 представляет схематически электрическую систему в соответствии с другим вариантом осуществления изобретения.
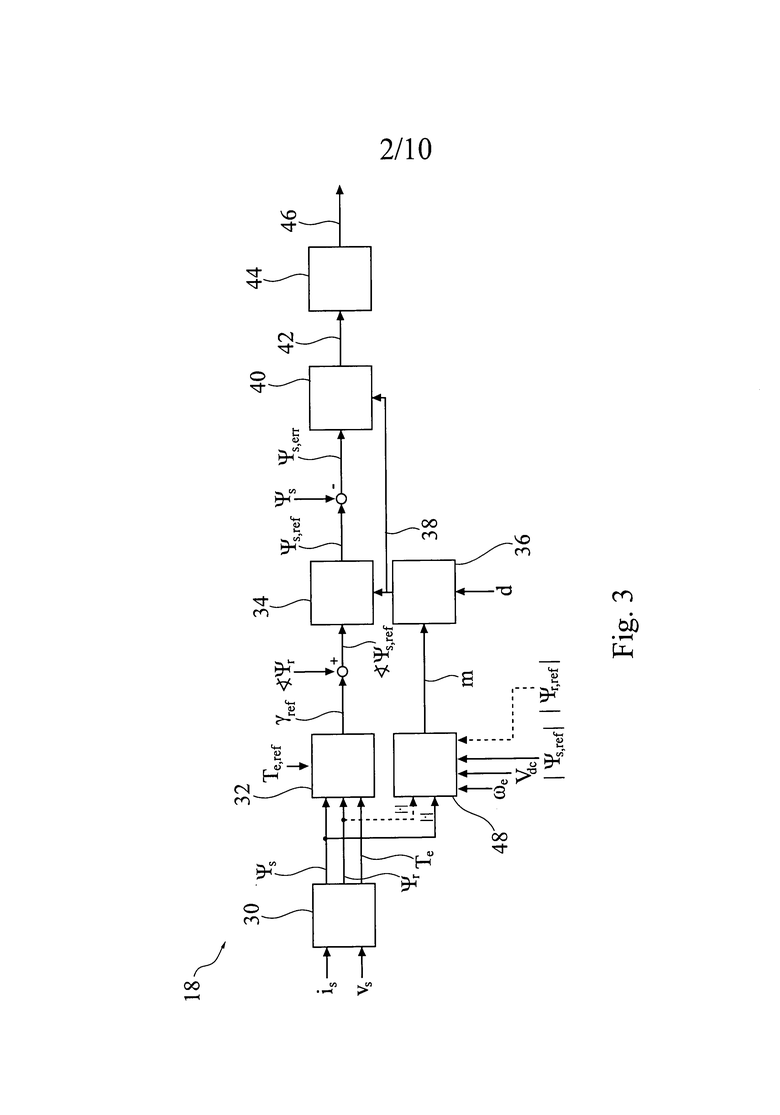
Фиг.3 представляет схематически конструкцию контроллера в соответствии с вариантом осуществления изобретения.
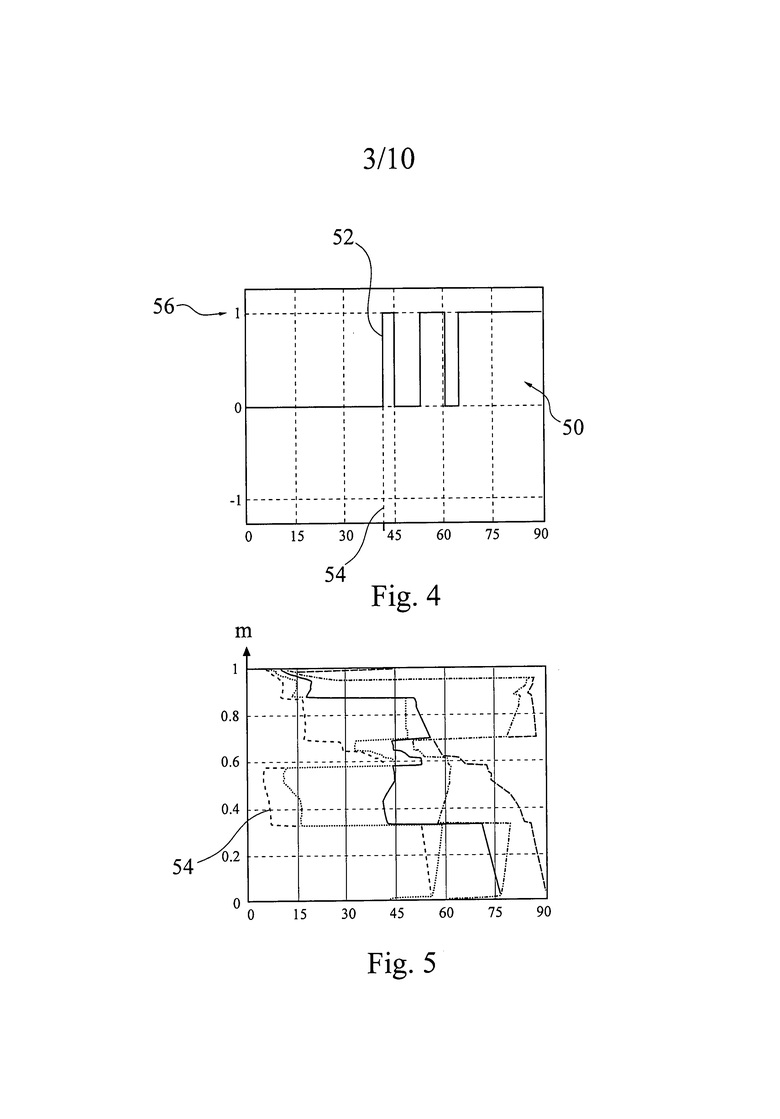
Фиг.4 представляет график ОРР в соответствии с вариантом осуществления изобретения.
Фиг.5 представляет график углов переключения в функции от индекса модуляции в соответствии с вариантом осуществления изобретения.
Фиг.6 представляет график последовательности переключений в соответствии с вариантом осуществления изобретения.
Фиг.7 представляет график траектории магнитного потока статора в установившемся режиме.
Фиг.8 представляет график амплитуды магнитного потока статора, показанного на фиг.7.
Фиг.9 представляет график фазового угла магнитного потока статора, показанного на фиг.7.
Фиг.10 представляет диаграмму, объясняющую проблему управления способа в соответствии с вариантом осуществления изобретения.
Фиг.11 представляет график траекторий магнитного потока статора и ротора в соответствии с вариантом осуществления изобретения.
Фиг.12 представляет график траекторий магнитного потока статора и ротора в соответствии с вариантом осуществления изобретения.
Фиг.13 представляет график последовательности переключений в соответствии с вариантом осуществления изобретения.
Фиг.14 представляет график, объясняющий эффект сдвига времени перехода в соответствии с вариантом осуществления изобретения.
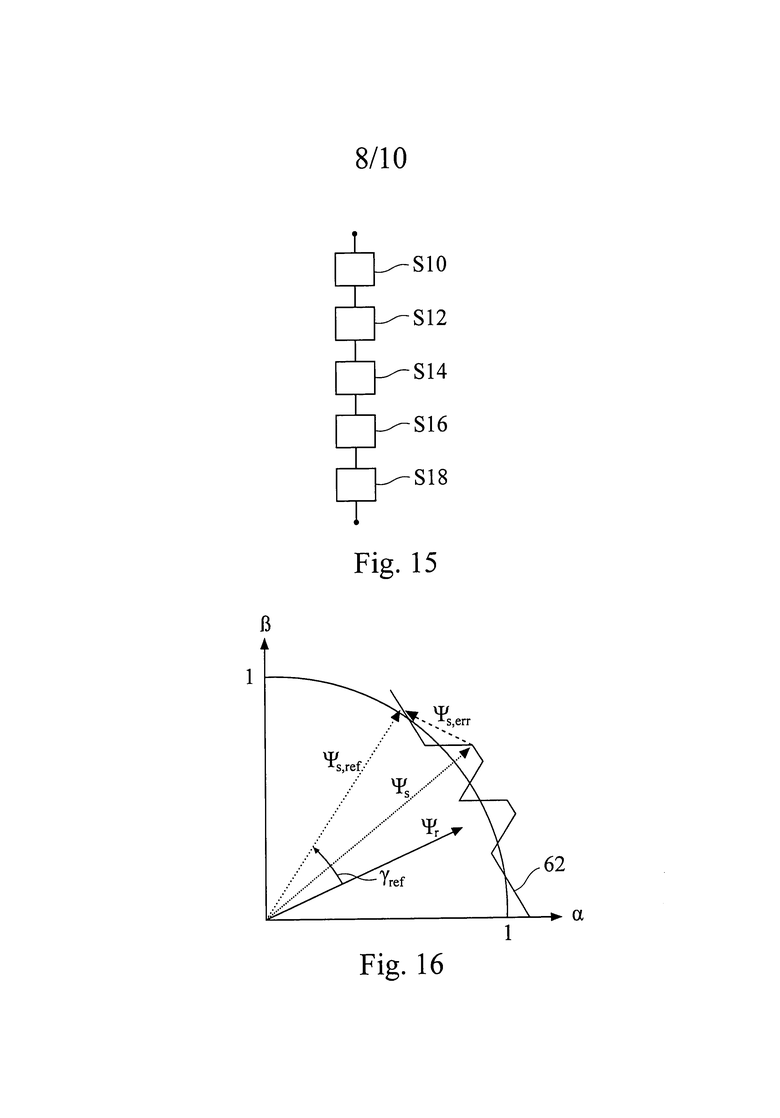
Фиг.15 представляет блок-схему способа оптимизации в соответствии с вариантом осуществления изобретения.
Фиг.16 представляет график, объясняющий процесс определения опорного магнитного потока статора в соответствии с вариантом осуществления изобретения.
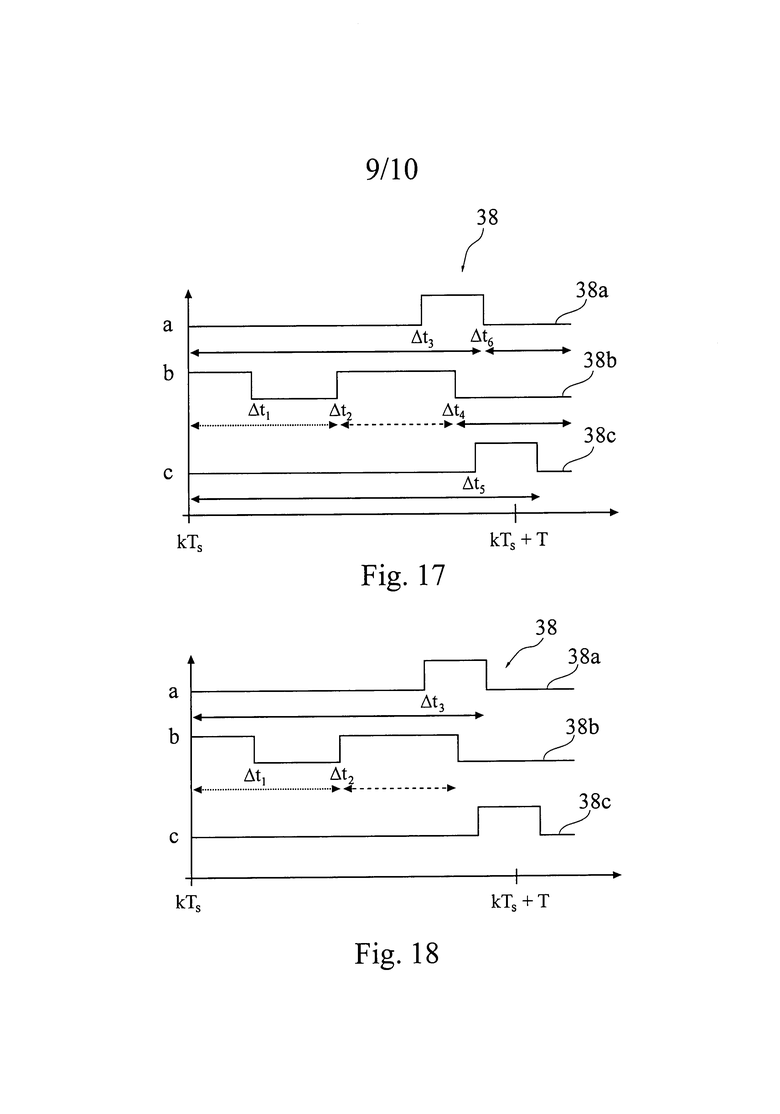
Фиг.17 представляет график последовательности переключений с целью объяснения алгоритма квадратичного программирования в соответствии с вариантом осуществления.
Фиг.18 представляет график последовательности переключений с целью объяснения алгоритма апериодического управления в соответствии с вариантом осуществления изобретения.
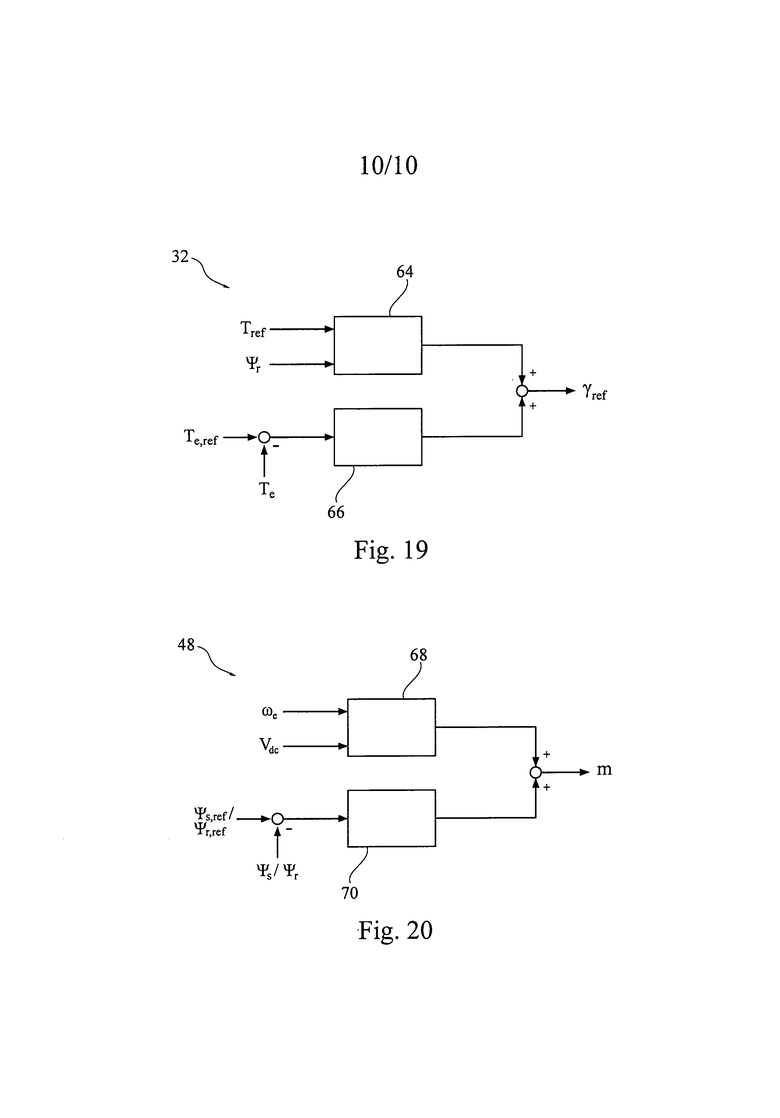
Фиг.19 представляет схематически конструкцию блока контроллера в соответствии с вариантом осуществления изобретения.
Фиг.20 представляет схематически конструкцию другого блока контроллера в соответствии с вариантом осуществления изобретения.
Ссылочные обозначения, используемые на чертежах, а также их значения перечислены в сводном списке ссылочных обозначений. В принципе одинаковым элементам присвоены одинаковые обозначения на чертежах.
Варианты осуществления изобретения
Фиг.1 представляет электрическую систему 10 с конвертором 12, в частности инвертором 12, и вращающуюся электрическую машину 14, к которой присоединен инвертор 12. Инвертор 12 может быть частью непрямого конвертора и соединяться с линией постоянного тока конвертора напряжением VDC постоянного тока. Инвертор 12 содержит схему 16 инвертора с переключателями, которые преобразуют напряжение постоянного тока в трехфазное напряжение переменного тока, которое подается на электрическую машину 14. Как вариант инвертор 12 может представлять собой инвертор, который выдает только однофазное напряжение переменного тока. Вообще инвертор 12 может быть многофазным или многоуровневым инвертором, а система 10 может быть многофазной системой.
Инвертор 10 (скорее электрическая система 10 - прим.перевод.) содержит контроллер 18 с FPGA или процессор, который предназначен для расчета способа (метода) оптимизации алгоритма оптимизации, как описывается выше и в дальнейшем. Контроллер 18 предназначен для расчета управления с обратной связью, т.е. принимает входные переменные, например напряжения и токи в электрической машине 14 или скорость электрической машины 14, формирует последовательности переключений и подает эти последовательности переключений на переключатели 16 инвертора, которые затем воздействуют на входные переменные.
Фиг.2 представляет альтернативный вариант осуществления изобретения электрической системы 101 с конвертором 12, в частности выпрямителем 12. В варианте осуществления изобретения, показанном на фиг.2, выпрямитель 12 соединен с сетью 20 через трансформатор и фильтр 22, например L, LC или LCL фильтр. Для управления инвертором 12 контроллер 18 принимает напряжения и токи в сети 20. В этом случае модель управления электрической машиной 14 может быть заменена моделью управления сетью 20, имеющей виртуальный импеданс 24 сети и импеданс трансформатора и фильтра 22.
На фиг.3 схематически представлена конструкция контроллера 18.
Контроллер 18 содержит блок 30 расчета магнитного потока, который принимает мгновенные токи is и мгновенные напряжения vs от электрической машины 14 или сети 24. Мгновенные напряжения vs измерять необязательно. Они могут быть воссозданы с хорошим приближением из сигналов известного состояния переключения и измеренного напряжения линии постоянного тока. Блок 30 расчета магнитного потока содержит модель электрической машины 14 или электрической сети 24 и предназначен для расчета действительных магнитных потоков ψs, ψr из мгновенных токов is и мгновенных напряжений vs. В случае сети 20 магнитные потоки ψs, ψr могут быть виртуальными потоками.
В случае вращающейся электрической машины ψs является расчетным магнитным потоком статора, a ψr является расчетным магнитным потоком ротора. Расчетный вращающий момент Те пропорционален векторному произведению магнитных потоков
Магнитные потоки ψs, ψr и вращающий момент Те поступают на блок 32 опорного угла, который определяет опорный угол γref, угол между расчетным магнитным потоком ψr ротора и опорным магнитным потоком ψs ref статора. Также для определения опорного угла γref может использоваться опорный вращающий момент Те ref.
Угол опорного магнитного потока ψs ref статора является суммой угла расчетного магнитного потока ψr и опорного угла γref. Угол опорного магнитного потока ψs ref является входным в блок 34 опорного магнитного потока - блок, который определяет модуль опорного магнитного потока ψs ref статора. При определении модуля опорного магнитного полтока ψs ref может использоваться выбранная последовательность 38 переключений из селектора 36 ОРР.
Искажение магнитного потока ψs еrr - это разница между опорным магнитным потоком ψs ref и расчетным магнитным потоком ψs. Искажение магнитного потока ψs err и выбранная последовательность 38 переключений является входом для блока 40 минимизации искажения, который модифицирует и оптимизирует последовательность 38 переключений таким образом, что искажение магнитного потока ψs err сводится к минимуму. Модифицированная последовательность 42 переключений является входом в блок 44 положения переключателя, который формирует последовательность 46 положений переключателя из модифицированной последовательности 42 переключений. Последовательность 42 переключений содержит только переходы переключения с уровнями напряжения, которые должен вырабатывать инвертор 12.
Блок 44 положения переключателя преобразует уровни напряжения переходов переключения в положения переключателя, содержащие состояния переключения переключателей, которые образуют соответствующий уровень напряжения.
Для выбора последовательности 38 переключения ОРР* селектор 36 принимает индекс модуляции m от блока 48 индекса модуляции и число пульсаций d. Число пульсаций d - это число импульсов ОРР и зависит от скорости вращения двигателя 14 и от требуемой частоты переключений.
Индекс модуляции m определяется с помощью блока 48 из частоты ώе и напряжения VDC линии постоянного тока. Дополнительно длина расчетного магнитного потока ψs статора и расчетного магнитного потока ψr ротора и длина опорного магнитного потока ψr ref ротора могут использоваться для управления с обратной связью индекса m модуляции.
Функциональные модули 30, 32, 34, 36, 40 и 48 контроллера 18 могут быть выполнены как программные модули или вычислительные процедуры соответственно. Как вариант функциональные блоки полностью или частично могут выполняться аппаратно.
Далее со ссылкой на фиг.4-9 описываются аспекты вычисления ОРР (оптимизированных последовательностей импульсов) и функционирование блока 36.
Фиг.4 представляет график ОРР 50 с пятью переходами переключения 52, т.е. с числом пульсаций d=5. На графике угол 54 переключения перехода 52 переключения показан на оси X графика, а уровни 56 напряжения перехода 52 переключения показаны на оси Y графика. В данном случае ОРР 50 является ОРР для трехуровневого инвертора 12 с тремя уровнями напряжения -1, 0, 1. ОРР 50 представляет собой однофазную последовательность импульсов с d=5 основных углов 54 переключения (углы переключения в пределах диапазона 0-90 градусов) для трехуровневого инвертора 12. ОРР 50 содержит последовательность u=[0 1 0 1 0 1] переключений в функции от пяти углов 54 переключения и при индексе модуляции m=0,6. На фиг.4 показана только четверть полного основного периода. Фиг.5 представляет график основных углов 54 переключения в функции от индекса модуляции m, который показан на оси Y графика. Уровни напряжения на фиг.4 и углы переключения на фиг.5 зависят от индекса модуляции m. Они хранятся в поисковой таблице для числа пульсаций d=5, и ОРР 50 может считываться с помощью блока 36, когда требуется выбрать ОРР с числом пульсаций d=5.
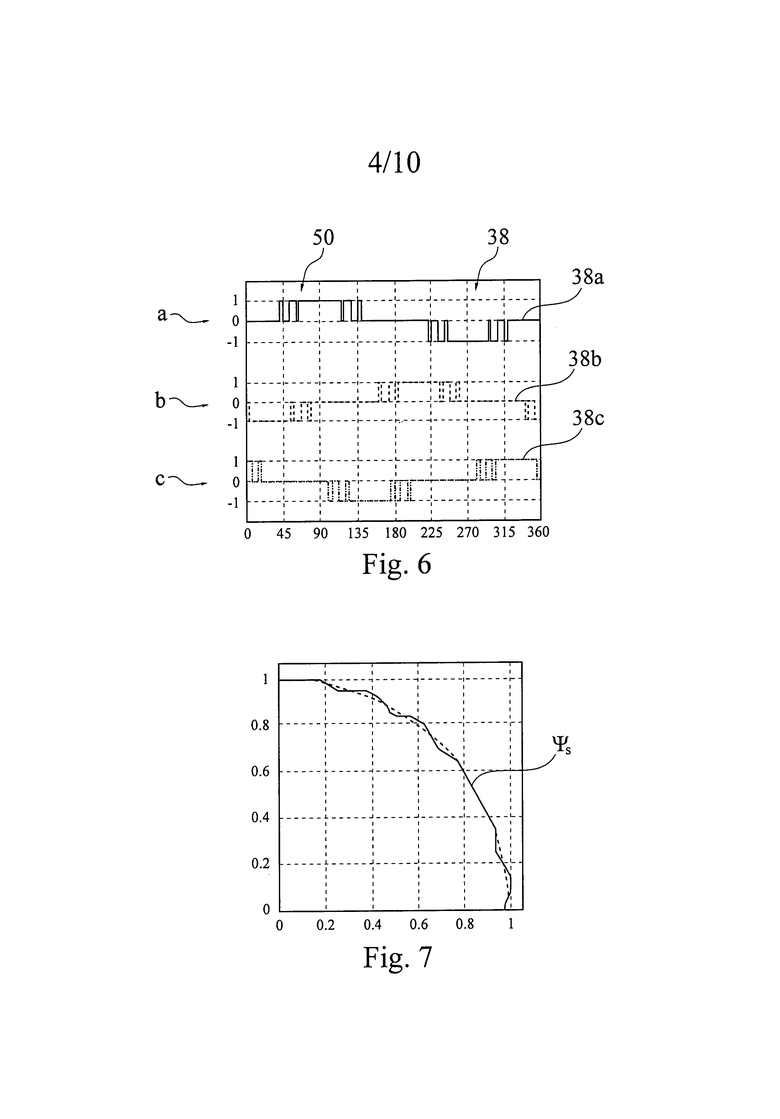
Фиг.6 представляет график трехфазной последовательности 38 импульсов или последовательности 38 переключений при индексе модуляции m=0,6 и числом пульсаций d=5, которая создана с помощью блока 36 исходя из ОРР 50.
При вычислении ОРР офлайн обычно четвертьволновая симметричность накладывается на однофазную последовательность импульсов 50. Последовательности 38а, 38b, 38с импульсов фаз a, b и с трехфазной системы 10 получены путем сдвига однофазной последовательности 50 на 0, 120 и 240 градусов соответственно. В результате трехфазная последовательность импульсов или последовательность 38 переключений в пределах 360 градусов полностью характеризуется однофазной последовательностью 50 в пределах 90 градусов.
Как уже говорилось, OPPs 50 вычислены офлайн и хранятся в блоке 36. Чтобы вычислить однофазную ОРР 50 в пределах 90 градусов, устанавливается число основных углов переключения (число пульсаций) d и однофазная последовательность переключений и. Для оптимизации выбран критерий, состоящий в следующем: общий выбор - это взвешенная сумма гармоник возведенного в квадрат противофазного напряжения, которая эквивалентна общему искажению высшими гармониками тока. Для каждого значения индекса модуляции m этот критерий минимизируется с помощью оптимизации углов 54 переключения. Этот этап оптимизации повторяется для всех индексов модуляции m и приводит к набору углов 54 переключений, который определяет ОРР 50 как функцию индекса модуляции, как показано на фиг.4 и 5.
Начиная от однофазной ОРР 50 в пределах 90 градусов (показана на фиг.4) трехфазная последовательность 38 переключений получается точно с помощью четвертьволновой симметричности и сдвига фазы последовательности 38а на 120 и 240 градусов для создания последовательности (временной диаграммы) импульсов для фазы b и с: 38b, 38с соответственно. Это приводит к последовательности 38 переключений, показанной на фиг.6.
Далее объясняются характеристики установившегося магнитного потока статора, полученные с помощью ОРР 50.
Обозначим символом Р peak (&) инвариантное преобразование (матрицу) из (а, b, с)-системы координат в неподвижную прямоугольную (ά-β)-систему координат и обозначим Vdc полное напряжение линии постоянного тока инвертора. Рассматривая электрическую машину 14, соединенную с инвертором 12, и пренебрегая сопротивлением статора машины 14, траектория установившегося магнитного потока статора в (ά-β)-системе координат, которая соответствует ОРР 50, получается путем интегрирования последовательности 38 переключений (т.е. u(ά-) в формуле (1)), определяемой с помощью ОРР 50 в пределах углового диапазона [0, δ], где δ - это действительное угловое положение вектора напряжения.

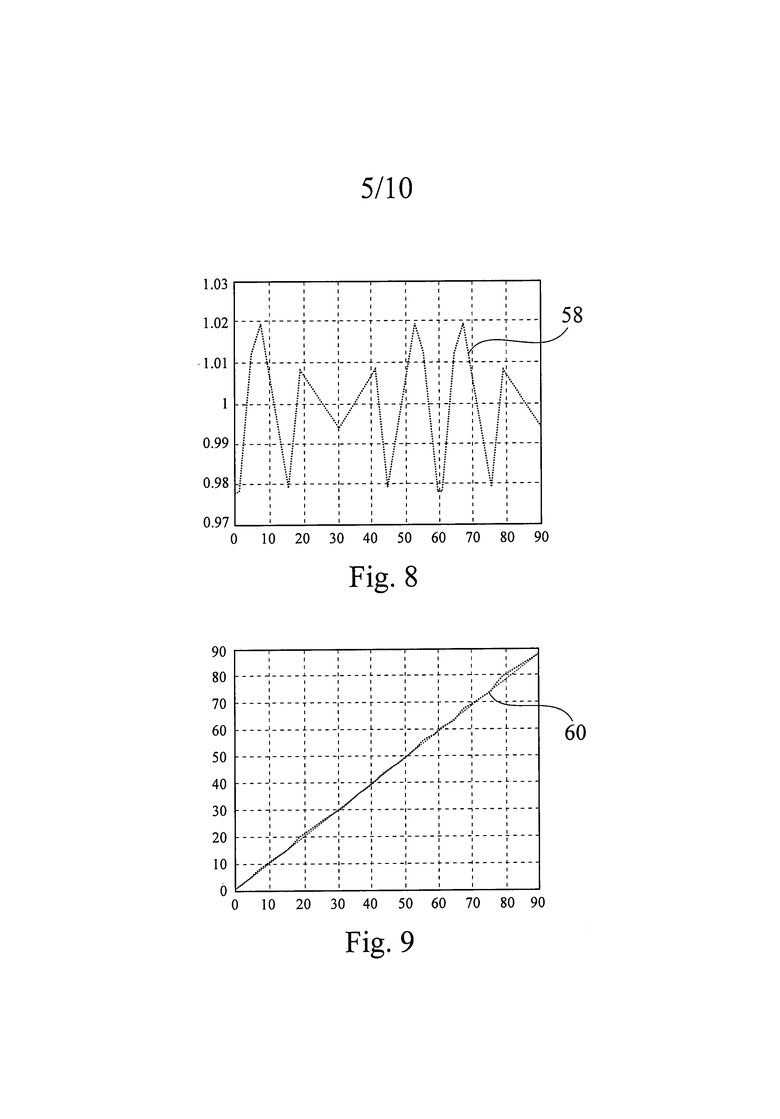
В этом примере результирующая траектория ψs установившегося магнитного потока статора в (δ, β)-системе координат показана на фиг.7 в пределах 90 градусов. Средняя амплитуда траектории ψs равна единице (пунктирная линия). Еще очевидно из фиг.7, что амплитуда траектории вектора 58 магнитного потока статора совершает колебания около единицы, как показано на фиг.8. Отметим, что фазовый угол вектора 60 магнитного потока статора также колеблется около своего номинального значения, как можно видеть на фиг.9. Это колебание происходит вследствие изменений частоты ωe статора, что вытекает из использования векторов напряжения различных и дискретных модулей, включая нулевые векторы. Амплитудное и угловое колебание вектора 58, 60 магнитного потока статора, который повторяет сам себя каждые 60 градусов, а также имеет 30-градусную симметричность, создает, спектр дискретных частот гармоник напряжения.
Если напряжения, подаваемые на двигатель 14, были бы синусоидальными напряжениями, то магнитный поток ψs повторял бы траекторию, показанную пунктиром на фиг.7, и характеристики 58, 60 были бы прямыми линиями. Отсутствовали бы амплитудные и фазовые искажения. Поскольку инвертор 12 предназначен только для создания дискретных уровней напряжения (см., например, фиг.6), ОРР 50 оптимизируется так, что амплитудные и фазовые искажения минимизированы. Однако минимизация происходит при допущении в отношении работы двигателя 14 в установившемся режиме, например, частота и нагрузка не изменяются.
В частности, во время внезапных или сильных изменений режимов работы двигателя 14 это допущение далее не выполняется, и искажения амплитуды или фазы уже не будут минимальными для выбранной ОРР 50 или последовательности 38 переключений. Однако резонно допустить, что последовательность 38 переключений, которая оптимальна по отношению к установившемуся режиму работы, является подходящей для формирования последовательности 42 переключений, пригодной для работы в переходном процессе.
На фиг.3 представлена схема замкнутой системы управления. Последовательность 46 положений переключателей подается с помощью контроллера 18 на конвертор 12, который формирует соответствующие выходные напряжения для электрической машины 14. Изменение режимов работы влияет на мгновенный ток is и мгновенное напряжение vs, которые являются входными параметрами контроллера 18. Следовательно, осуществляется управление с обратной связью.
Другими словами, быстродействующее управление с обратной связью электрической машины 14, основанное на ОРР 50, может быть достигнуто с помощью управления вектором ψs магнитного потока статора по его опорной траектории. Эта цель достигается с помощью прямого управления переходами 52 к переключению ОРР 50. В результате вектор ψs магнитного потока статора управляется таким образом, что электрическая машина 14 в достаточной мере намагничивается, чтобы электрической машиной 14 создавался заданный электромагнитный вращающий момент Те ref.
Далее будет описана задача управления для минимизации искажение магнитного потока ψs err статора и функционирование блоков, изображенных на фиг.3.
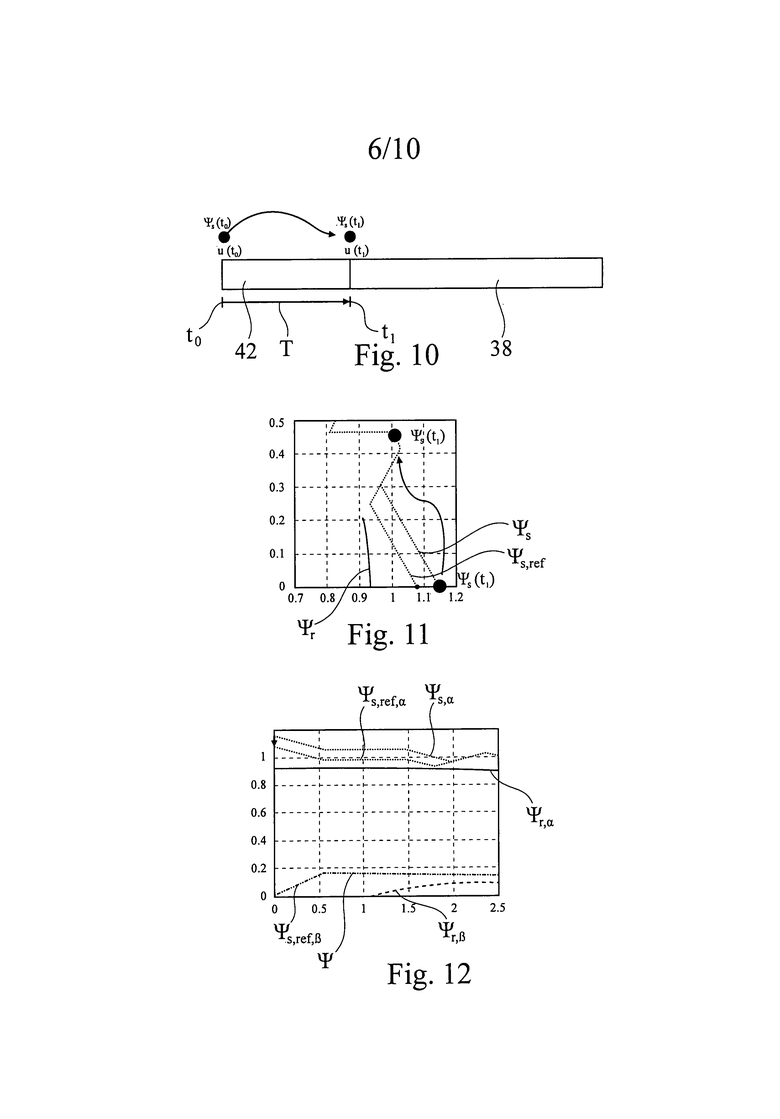
Возникшая задача управления может быть сформулирована как задача оптимального управления с ограничениями с помощью так называемого метода снижения интервала времени или, что эквивалентно, как задача управления с прогнозированием на основе модели. На фиг.10 представлена диаграмма, поясняющая вышеупомянутую задачу управления.
Основная идея состоит в том, чтобы использовать интервал времени конечной продолжительности Т и перемещать вектор ψs магнитного потока статора в пределах этого интервала до его заданного положения, используя временную диаграмму следования импульсов или модифицированные последовательности 42 переключений, корректируя таким образом искажение магнитного потока статора. Допускается работа в установившемся режиме от конца интервала времени Т вперед. В частности, допускается, что от t+Т вперед будет применяться оригинал, т.е. временная диаграмма следования импульсов в установившемся режиме или немодифицированная (исходная) последовательность 38 переключений.
Управление с прогнозированием на основе модели в отношении OPPs может быть интерпретировано в качестве граничной задачи управления, как изображено на фиг.10. Начиная с момента времени t0 при положении переключателя u(t0) и магнитного потока ψs(t0) статора, должна быть получена модифицированная последовательность 42 переключений в пределах интервала Т; эта модифицированная последовательность 42 переключений перемещает вектор ψs к конечному значению магнитного потока ψs(t1). Более того, модифицированная последовательность 42 переключений должна приводить к конечному положению переключателя u(t1). В этой граничной задаче управления u(t0) и ψs(t0) являются начальными условиями, в то время как u(t1) и ψs(t1) соответственно являются конечными условиями. Интервал времени Т рассматривается как Т=t1-t0. Предполагается, что диаграмма следования импульсов в установившемся режиме используется от момента времени t1 вперед.
Алгоритм изменения последовательности переключений, объясняемый ниже, допускает, что электрическая система 10 всегда находится в условиях работы в переходном режиме, т.е. она пытается все время минимизировать искажение магнитного потока. Следовательно, алгоритм всегда работает при t0, а момент времени t1 практически никогда не достигается.
Требуется, чтобы модифицированная последовательность 42 переключений была оптимальной в том смысле, что она минимизирует общее искажение высшими гармониками (THD) тока и/или вращающего момента. Модифицированная последовательность 42 переключений также может минимизировать потери при переключении силовых переключателей 16 инвертора, если это требуется. Величины вращающего момента и магнитного потока статора должны удерживаться около их опорных значений. Кроме того, токи статора должны удерживаться ниже своих верхних (положительных) предельных значений и выше своих нижних (отрицательных) предельных значений. Ограничение тока может служить ограничительным условием.
Алгоритм допускает, что искажение ψs err магнитного потока статора мало, и чтобы перемещать искажение ψs err в пределах интервала времени Т, требуются лишь небольшие поправки переходов 52 к переключениям (моменты времени переключений). Допускается, что эти малые изменения в переходах 52 к переключениям не влияют (в значительной степени) на оптимальность ОРР 50 или, что эквивалентно, не портят общее искажение тока высшими гармониками (THD). Следовательно, ОРР 50 в установившемся режиме может использоваться как базовая последовательность импульсов при получении последовательности 42 переключений (или ОРР переходного режима), тем самым упрощая граничную задачу управления. В частности, может быть поставлена задача управления вектором ψs магнитного потока статора по его заданной опорной траектории в (а, Р)-системе координат путем настолько малого изменения, насколько возможно, переходов 52 переключения ОРР 50 в пределах интервала времени Т. Этот принцип контроля называется Model Predictive Pulse Pattern Control (MP3C) - управление с прогнозированием последовательностью импульсов на основе модели.
Пример этого принципа дан на фиг.11-13, который показывает управление с прогнозированием последовательностью импульсов на основе модели для двухуровневого инвертора.
Фиг.11 изображает график магнитных потоков статора и ротора в (ά,β)-системе координат. На фиг.11 указан сдвиг действительного или расчетного магнитного потока ψs по отношению к опорному магнитному потоку ψs ref с уточненным искажением ψs магнитного потока статора.
Фиг.12 представляет график нормализованных ά- и β-компонентов векторов ψs, ψs ref магнитного потока статора и вектор ψr магнитного потока ротора как функции времени в мс, в частности с интервалом времени от 0 мс до 2,5 мс. Траектории на фиг.11 также заключены в этот интервал времени, следовательно, траектория ψr заканчивается в середине графика.
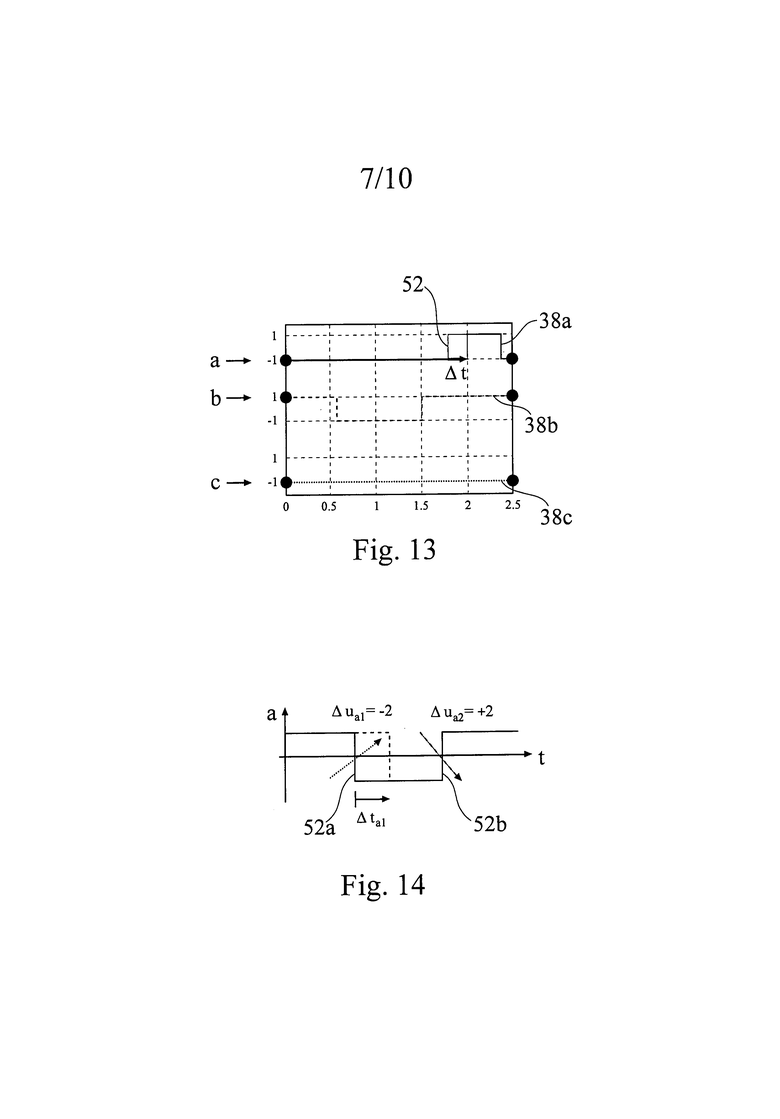
Фиг.13 представляет график положений 38а, 38b, 38с переключателя трех фаз в функции времени в мс и поправки (временного сдвига) Δt перехода 52 переключения в фазе а.
Фиг.14 представляет график, поясняющий эффект изменения времени 54 перехода переключения 52. В частности, рассматривается одна фаза, например фаза а, и инвертор 12 с уровнями напряжения u=[-1, 1] (т.е. двухуровневый инвертор), u=[-1, 0, 1] (т.е. трехуровневый инвертор) или u=[-1, -0,5, 0, 0,5, 1] (т.е. пятиуровневый инвертор). Обозначим VDC полное напряжение линии постоянного тока. Тогда сдвиг перехода 52 переключения на Δt приводит к изменению вектора магнитного потока статора в (а, b, с) на

где Δt дается в нормализованных единицах. На фиг.14 приведен пример, основанный на двухуровневом инверторе. В этом случае задержка отрицательного перехода 52а переключения с Δua1= -2 в фазе а повышает вольт-секунды в этой фазе и соответственно магнитный поток статора, хотя улучшение перехода к переключению дает противоположный эффект, т.е. снижает амплитуду магнитного потока в направлении фазы а.
Ниже в соответствии с фиг.15 дается сводная схема работы алгоритма МР3С. Алгоритм содержит пять этапов. Он работает в области дискретного времени и активизируется каждые Ts секунд. Интервал дискретизации Ts обычно составляет 25 микросекунд или 50 микросекунд. Задача управления формулируется и решается в стационарной прямоугольной системе координат (ά-β). На этапе S10 при временном шаге k блок 30 вычисляет векторы магнитного потока статора и ротора в стационарной системе координат, создавая расчетный вектор ψs=[ψsά ψsβ] магнитного потока статора и расчетный вектор ψr=[ψrά ψrβ] магнитного потока ротора. Обозначим углом (ψ) угловое положение вектора магнитного потока и /ψ/ его величину. Векторы ψs и ψr вычисляются на основе машинной модели электрической машины 14. В случае соединения инвертора 12 с электросетью магнитные потоки могут основываться на виртуальных магнитных потоках, как указывалось выше. Задержка, внесенная в результате времени вычислений, может компенсироваться с помощью поворота вычисленного вектора ψs магнитного потока статора и вычисленного вектора ψr на ωeTs с опережением по времени, т.е. угол (ψs)=(ψs)+ώe Ts и соответственно для вектора ψr магнитного потока ротора. Здесь ώе частота статора электрической машины 14.
На этапе S12 блок 32 вычисляет опорный угол γref. Для графического суммирования с целью вычисления этого параметра обратимся к фиг.16. Фиг.16 представляет собой график, подобный графикам, изображенным на фиг.7 и 11, и показывает параметры в (ά-β) системе координат.
В первую очередь напомним, что электромагнитный вращающий момент Те, создаваемый машиной, может быть записан следующим образом

где γ это угол между вектором ψs магнитного потока статора и вектором ψr магнитного потока ротора, a kr - константа. Когда машина 14 полностью намагничена, величина вектора ψs ref равна 1 нормализованной единице. Тогда для заданной величины вектора ψr магнитного потока ротора и заданного опорного вращающего момента Те ref требуемый опорный угол между векторами магнитного потока статора и ротора выражается следующим образом

Это отклонение возможно, поскольку магнитный поток ψr ротора может быть вычислен очень точно. В некоторых случаях двигатель 14 имеет даже датчик положения, который определяет непосредственно положение ротора и, следовательно, угол магнитного потока ротора.
После этого опорный угол вектора ψs ref магнитного потока статора вычисляется с помощью выражения

Опорный вектор ψs ref затем получается с помощью блока 34, например, путем считывания величины (длины) вектора ψs ref магнитного потока статора при угле (ψs ref) из таблицы, сохраняемой в блоке 34. Эта таблица может быть рассчитанной заранее для всех оптимизированных последовательностей импульсов. На фиг.16 сохраненные значения величины вектора магнитного потока статора указаны угловыми точками траектории 62 вектора ψs магнитного потока статора. Другой возможный вариант состоит в том, чтобы вычислять величину онлайн исходя из выбранной последовательности 38 переключений, т.е. путем интегрирования напряжений последовательности переключений по времени.
После этого искажение ψs err магнитного потока статора вычисляется с помощью формирования разницы между опорным вектором ψs ref магнитного потока и вычисленным вектором ψs магнитного потока статора

Из выражения (6) очевидно, что искажение магнитного потока статора напрямую без необходимости производить отдельное вычисление (i) основной составляющей магнитного потока статора и (ii) соответствующего гармонического спектра магнитного потока статора. Отсутствие необходимости иметь схему, которая вычисляет (i) и (ii) в режиме реального времени, добавляется к простоте и надежности настоящего способа. Поэтому описанный способ может быть более подходящим для промышленного применения по сравнению с современными способами отслеживания траектории.
Этап S14 (см. фиг.15) состоит в применении контроллера действительной последовательности импульсов, в котором блок 40 опорного магнитного потока модифицирует последовательность 38 переключений в пределах определенного интервала времени Т таким образом, чтобы минимизировать амплитуду искажения ψs err магнитного потока статора. Другими словами модифицированная последовательность 42 переключений формируется из последовательности 38 переключений с помощью искажения ψs err магнитного потока статора.
Алгоритм управляющего устройства может быть использован в трех формах, которые будут объясняться ниже. В частности, алгоритм управления, основанный на (1) квадратичной программе (QP), (2) алгоритм управления, основанный на приближенной active set QP и (3) апериодический алгоритм управления.
Перед попыткой минимизации искажения ψs err магнитного потока статора в последовательность 38 переключений могут быть внесены дополнительные импульсы. Это может быть эффективно, когда создана очень быстрая реакция крутящего момента - например, в ответ на скачкообразное изменение уставки вращающего момента - и не происходит соответствующих переходов переключений в пределах отмеченного интервала времени. Минимум времени включенного и выключенного состояний полупроводниковых переключателей может быть введен, если требуется, путем введения ограничительных условий в соответствии с моментами времени переключения.
В частности дополнительный импульс может быть введен с помощью внесения отрицательного или положительного перехода переключения 52а, 52b (см., например, фиг.14), т.е. перехода переключения от высокого к низкому уровню напряжения и затем в обратном порядке (или наоборот) в те же самые моменты времени.
При необходимости алгоритм управления последовательностью импульсов затем может перемещать переходы переключения.
На этапе S16 переходы переключения, которые произойдут в пределах интервала дискретизации, удаляются из последовательности 42 переключений, т.е. переходы переключения, которые будут подаваться на инвертор 12. Это может быть достигнуто с помощью обновления указателя таблицы поиска, в которой сохраняются углы переключения последовательности 42 переключений и соответствующие трехфазные величины потенциала.
На этапе S18 создаются команды на переключение в пределах интервала дискретизации, т.е. моменты времени переключений и соответствующие модифицированные положения переключений. На этом этапе может быть использован алгоритм predictive balancing*, для которого требуются команды на переключение в пределах нескольких интервалов дискретизации. Модифицированная последовательность 42 переключений может содержать только уровни напряжения, а не положения переключений, которые создают эти уровни напряжения. Алгоритм прогнозируемого симметрирования может выбирать положения переключений таким образом, что конкретные внутренние состояния инвертора 12, например потенциалы нулевой точки, оптимизируются.
После этого алгоритм начинается снова с этапа S10.
Как указано выше, существуют различные возможные варианты реализации алгоритма, которые преобразовывают последовательность 38 переключений в последовательность 42 переключений (см. фиг.3).
Первый вариант представляет собой алгоритм оптимального контроля, основанный на квадратичной программе (QP).
Задача управления может быть сформулирована как квадратичная программа, особый тип метода математической оптимизации, который минимизирует нескорректированное искажение магнитного потока (управляемая переменная) и изменения в моментах переключения (обрабатываемая переменная). Это может быть сформулировано следующим образом
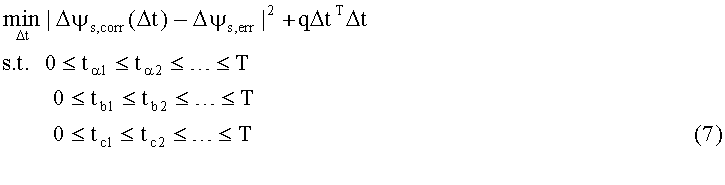
Первое слагаемое выражения (7) - для минимизации искажения магнитного потока; второе слагаемое - для минимизации сдвигов по времени, собранных в матрице Δt с элементами матрицы Δtxi, где x это фаза и i это индекс переключения последовательности 38 переключений. Вес q можно выбрать очень малым, таким образом задавая порядок корректирования магнитного потока.
Неравенства в выражении (7) представляют собой ограничения на моменты времени txi переключений. Моменты времени должны поддерживать порядок переключений и должны быть в пределах интервала (т.е. между 0 и Т). В первом слагаемом выражения (7) ψs,corr(Δt) является коррекцией магнитного потока, т.е.

Формула (8) выводится из формулы (2) и обобщается для трех фаз, как формула (1). Величины Δuxi являются переключениями (изменениями уровня напряжения) i-го переключения на фазе х. В формулу (8) введена матрица Р.
После решения сформулированной выше задачи коррекция магнитного потока достигается с помощью сдвига всех переключений на Δt, т.е. преобразованная последовательность 42 переключений является последовательностью 38 переключений с временами переключений txi, измененных посредством временных компенсаций или временных сдвигов Δtxi.
Пример этого воспроизведен на фиг.17 с графиком, подобным графику на фиг.6. Фиг.17 изображает последовательность 38 переключений с последовательностями 38а, 38b, 38с импульсов для фаз а, b, с соответственно. Более того, на фиг.17 показан текущий момент времени kTs и интервал Т определенной продолжительности для оптимального управления на основании QP. Нижняя и верхняя границы для моментов времени переключения показаны стрелками. Шесть спадов произошло при переключениях в пределах интервала Т. В формуле (7) Δt обозначен вектор коррекций Δtxi времени переключения. Для фазы а, например, коррекция i-го переключения дается формулой

где tai ref обозначено i-е номинальное время переключения последовательности импульсов в фазе а. Заметим, что соответствующая коррекция угла переключения выражена формулой Δδ=ώсΔt, где ώс ограничена 0 и 1, a Δt дано в рu.
Времена переключений не могут быть преобразованы произвольно - они ограничены текущим моментом времени kTs и соседними переключениями в этой же фазе. Для примера рассмотрим двухуровневый инвертор на фиг.17. Первое переключение в фазе b, например, находится между kTs и номинальным моментом времени второго переключения. Второе переключение в фазе b может только быть задержано вплоть до номинального момента времени третьего переключения в той же фазе. Заметим, что сдвиг переключений в данной фазе производится независимо от других фаз.
При опережающих импульсах необходимо соблюдать особую осторожность. При управлении переключением до планируемого времени tref это также приводит к коррекциям магнитного потока в будущие моменты времени вплоть до того, как прошло номинальное планируемое время, т.е. kTs≥tref, другими словами, если коррекция сдвига по времени, имеющая место в течение текущей временной выборки, будет продолжаться в следующих нескольких периодах отсчета, то она не должна вводиться в будущие временные выборки. Следовательно, в следующих временных выборках, если номинальное планируемое время tref не будет иметь место, предстоящая задержка uxi*Δt будет все еще иметь место и должна учитываться при определении следующей текущей коррекции искажения магнитного потока. Это будет продолжаться до тех пор, пока не пройдет номинальное планируемое время tref, т.е. kTs≥tref. Эта будущая коррекция магнитного потока должна учитываться, например, при сохранении ее в буфере, корректируя искажение магнитного потока на этапе S2 и обновляя буфер соответственно.
Второй вариант - это алгоритм оптимального управления на основе аппроксимированной QP. Для формулирования и решения QP в реальном времени могут требоваться вычисления. Однако вычисления должны в значительной степени упроститься, если рассматривать формулирование аппроксимированной QP со следующими упрощениями и особенностями:
Во-первых, учитывается только один параметр Δt на фазу (вместо отдельных преобразований времени для каждого переключения). Другими словами, временные компенсации или сдвиги по времени Δtxi равны одному Δtx.
Во-вторых, используется формулирование active set QP с двумя итерациями. Задача оптимизации с ограничениями в виде неравенства (т.е.≥) может решаться без учета этих ограничений. На втором этапе эти ограничения вводятся и нарушенные ограничения выполняются как ограничения в форме равенства (т.е.=), которые затем называются действующими ограничениями.
В частности, одна итерация active set QP может быть сведена к следующему:
На первом этапе вычисляется количество переключений для каждой фазы.
На втором этапе не принимаются во внимание временные ограничения, и на фазу вычисляется Δtx без ограничения.

где M - матрица 3×2, которая является функцией количества переключений на фазу и веса q, det(M) - детерминация М и ψs.err - искажение магнитного потока в (ά, β)-системе координат. Формула (10) получается из формулы (7), т.е. если Δt введены в (7), матрица М и параметры отменяют параметры и матрицу Р в (7).
Оценка выражения (10) требует самое большое 22 умножения, 18 сложений и одно деление и, следовательно, является в смысле вычислений простой.
На третьем этапе определяются новые моменты времени переключений (т.е. новые времена коммутации), которые нарушают ограничительное условие. Эти ограничительные условия будут так называемыми действительными ограничениями.
Устанавливаются пределы новых моментов времени переключений, которые нарушают ограничительное условие и устанавливают их значения путем удаления их и соответствующих им переключений из задачи оптимизации. Другими словами для времен переключений, которые нарушают ограничительные условия, устанавливаются пределы в рамках этих ограничительных условий. Например, если должно быть выполнено условие tai≥0, но не выполнено, tai устанавливается на 0.
После этого вычисляется коррекция магнитного потока, которая получается из новых моментов переключений, и обновляются соответственно оставшиеся (еще не скорректированные) искажения магнитного потока.
После первой итерации вышеупомянутая итерация выполняется еще раз как вторая итерация. Эта процедура с двумя итерациями в известной степени легкая в отношении вычислений. Очень важно, чтобы сложность вычислений в принципе не зависела от числа рассматриваемых переключений, таким образом, она действительно не зависит от продолжительности интервала. В частности, размер матрицы М всегда 3×2.
Третий вариант - это алгоритм апериодического управления, который в отношении вычислений и по существу является простейшим из трех алгоритмов управления. Этот контроллер апериодической последовательности импульсов имеет следующие характеристики: вес q устанавливается равным нулю, интервал Т - переменная величина и определяется как интервал с минимальным временем, начинающийся в текущий момент времени kTs так, чтобы, по меньшей мере, две фазы имели переключения.
Алгоритм апериодического управления объясняется с помощью графика на фиг.18, который аналогичен фиг.6 и 17 и представляет график трехфазные двухуровневые последовательности импульсов 38а, 38b и 38с текущим моментом времени kTs и интервалом Т различной продолжительности при апериодическом управлении. Нижняя и верхняя границы моментов переключений (моментов времени) изображены стрелками.
Алгоритм апериодического управления имеет следующие четыре этапа.
На первом этапе определяются две фазы (в примере фазы а и b), которые имеют последующие запланированные переключения. Это обеспечивает продолжительность интервала Т, который имеет переменную продолжительность, для апериодического контроллера. Определяются все переключения (номинальные моменты времени и изменения положения переключателя) в пределах интервала Т.
На втором этапе искажение магнитного потока ψs err статора переводится (ά, β) - системы координат в (а, b, с)-систему координат, где работают только две из трех фаз (а и b, а и с или b и с).
На третьем этапе вычисляется требуемое преобразование времени Δtrec в (а, b, с) для каждой фазы

где ψs err - вектор магнитного потока в (a, b, с).
На четвертом этапе осуществляется прохождение через первую фазу, которая имеет переключения в пределах интервала. Для каждого переключения в этой фазе с номинальным временем переключения tnom и переключением Δu, выполняются следующие три подэтапа.
Во-первых, устанавливается tnew=tnom - sgn(Δu)Δtreq i, где sgn(Δu) € {-1, +1} обозначает направление, в котором переключается соответствующая фаза, т.е. в положительном или отрицательном направлении.
Во-вторых, ограничить tnew наложением соответствующих ограничительных условий на время переключения.
В-третьих, обновить требуемое преобразование времени переключения:

Напомним, что t дается в pu и Δu находится в [-1, 1].
На четвертом этапе повторяется вышеупомянутая процедура для второй фазы, в которой имеются переключения.
Поскольку апериодический контроллер ставит целью устранить искажение магнитного потока возможно быстрее и поскольку коррекции времени переключения не выбраковываются, апериодический контроллер имеет тенденцию действовать очень быстро и активно. Однако нет гарантии, что апериодический контроллер полностью устранит искажение магнитного потока в пределах интервала, поскольку ограничительные условия на времена переключения должны быть соблюдены.
Способ управления, т.е. внутренняя замкнутая система управления MP3С, как описано выше, в частности, в соответствии с фиг.15, может дополняться или расширяться с помощью внешних замкнутых систем управления, представленных на фиг.19 и 20.
Фиг.19 представляет вариант реализации блока 32 опорного угла. Как описано выше, опорный угол γref основан на опорном вращающем моменте Те ref и расчетном магнитном потоке ψr ротора. Те ref может быть получен от регулятора частоты вращения двигателя 14.
Субблок 64 управления с прогнозированием для опорного угла γref использует формулу (4) с целью вычисления с прогнозированием значения опорного угла γref. Это прогнозируемое значение может быть преобразовано с помощью компенсации сдвига субблока 66 медленнодействующего управления для опорного угла γref. Субблок 66 получает или определяет разницу величины расчетного вращающего момента Те и величины опорного вращающего момента Те ref и использует значение разницы для определения компенсации сдвига для опорного угла γref, например, PI контроллером.
Таким образом, первая замкнутая система автоматического управления, показанная на фиг.19, регулирует вращающий момент путем установки опорного угла между векторами магнитного потока статора и ротора.
Фиг.20 представляет вариант реализации блока 48 индекса модуляции. Субблок 68 управления с прогнозированием для индекса модуляции использует формулу у

для вычисления с прогнозированием значения индекса модуляции m. Vdc - расчетное напряжение линии постоянного тока и Vdc ref - опорное напряжение линии постоянного тока, основанное на том, какой была вычислена ОРР.
Прогнозируемое значение m может быть увеличено за счет компенсации сдвига от медленнодействующего субблока 70 индекса модуляции. Субблок 70 получает или определяет разницу величины расчетного магнитного потока ψr ротора и величины опорного магнитного потока ψr ref ротора и использует значение разницы для определения компенсации сдвига для индекса модуляции m, например, контроллером PI. Как вариант или дополнительно расчетный магнитный поток ψs статора и опорный магнитный поток ψs ref статора могут быть использованы при определении сдвига.
Таким образом, вторая замкнутая система автоматического управления, представленная на фиг.20, регулирует величину магнитного потока ротора (или статора) посредством регулирования индекса модуляции m. Медленнодействующий контроллер 70 магнитного потока ротора (или статора), следовательно, может использовать некоторую информацию из внутреннего цикла алгоритма МР3С с целью регулирования индекса модуляции m; в частности вольт-секундную коррекцию или действительный индекс модуляции.
Хотя изобретение проиллюстрировано чертежами и подробно описано в вышеупомянутом описании, эти иллюстрация и описание должны рассматриваться в качестве иллюстраций или в качестве примеров, не являясь ограничительными; изобретение не ограничено раскрытыми вариантами осуществления. Специалистам понятно, что другие разновидности раскрытых вариантов осуществления изобретения, описанного в формуле изобретения, могут выполняться на практике на основании изучения чертежей, описания изобретения и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает наличие других элементов или этапов и неопределенный артикль «а» или «аn» не исключает множественное число. Один процессор или контроллер или другой блок может выполнять функции согласно нескольким пунктам, изложенным в формуле изобретения. Сам факт того, что определенные критерии изложены в различных зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих критериев не может применяться с тем же успехом. Любое ссылочное обозначение в формуле изобретения не должно истолковываться как ограничение объема изобретения.
Перечень ссылочных обозначений
Изобретение относится к области электротехники и может быть использовано в электрических системах. Техническим результатом является обеспечение быстрой реакции на управляющее воздействие, в частности на вращающий момент, и малых искажений высшими гармониками. Конвертор (12) для электрической системы (10) управляется таким образом, что последовательности переключений для конвертора (12), которые определены в отношении определенной задачи первой оптимизации, преобразуются на втором этапе таким образом, чтобы последовательность переключений дополнительно оптимизировалась путем коррекции искажения магнитного потока, которое может быть результатом ограничительных условий, на которых основывается первая оптимизация последовательности переключений. 4 н. и 10 з.п. ф-лы, 20 ил.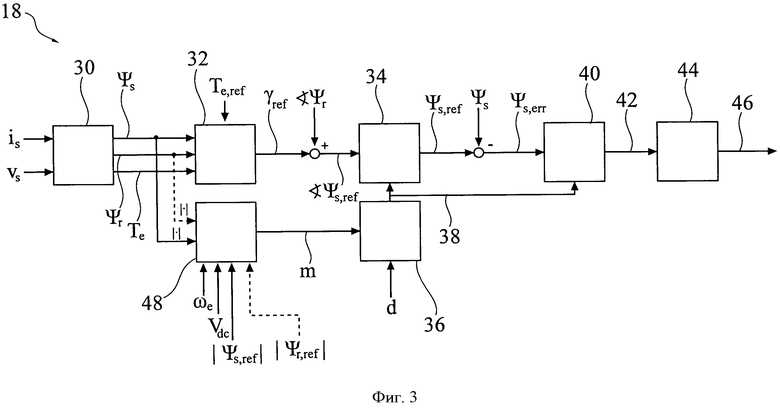
1. Способ управления конвертором (12) электрической системы (10), включающий этапы:
(а) определение последовательности (38) переключений конвертора (12) на основании действительного состояния электрической системы (10), причем последовательность (38) переключений содержит последовательность переходов (52) переключения конвертора (12), в которой каждый переход (52) переключения имеет время перехода;
(б) преобразование последовательности (38) переключений путем изменения по меньшей мере одного времени перехода переключения в последовательности переключений так, чтобы искажение магнитного потока, исходя из разницы между расчетным значением магнитного потока электрической системы и опорным значением магнитного потока электрической системы, сводилось к минимуму, причем расчетное значение магнитного потока определяют исходя из действительного состояния электрической системы;
(в) подачу преобразованной последовательности (42) переключений в конвертор.
2. Способ по п.1, в котором на этапе (а) последовательности (38) переключений создаются исходя из таблицы заранее вычисленных последовательностей переключений.
3. Способ по п.1, в котором опорное значение магнитного потока определяют как вектор в прямоугольной системе координат, причем угол вектора опорного значения магнитного потока основан на сумме угла вектора расчетного значения магнитного потока ротора и опорного значения угла, а опорное значение угла определяют из действительного состояния электрической системы (10).
4. Способ по п.3, в котором опорное значение угла устанавливают с помощью контроллера (66) с обратной связью между расчетным значением действительного состояния электрической системы и соответствующим опорным значением.
5. Способ по п.3, в котором величину вектора магнитного потока определяют из значения угла вектора магнитного потока и последовательности (38) переключений.
6. Способ по п.1, в котором на этапе (а) последовательность (38) переключений выбирают на основании индекса модуляции конвертора (12), причем индекс модуляции обозначает соотношение между амплитудой входного напряжения конвертора (12) и амплитудой выходного напряжения конвертора (12); при этом индекс модуляции устанавливают с помощью контроллера (70) с обратной связью между расчетным значением действительного состояния системы и соответствующим опорным значением.
7. Способ по любому из пп.1-6, в котором на этапе (б) время (54) перехода изменяют путем добавления сдвига по времени ко времени перехода, причем сдвиг по времени определяют таким образом, чтобы искажение магнитного потока по меньшей мере частично компенсировалось.
8. Способ по любому из пп.1-6, в котором полный сдвиг по времени получают из искажения магнитного потока, при этом распределяют полный сдвиг по времени на сдвиги по времени для длительностей переходов таким образом, чтобы соблюдались ограничения на последовательность (38) переключений.
9. Способ по любому из пп.1-6, в котором сдвиги по времени для длительностей переходов определяют так, чтобы свести к минимуму сдвиги по времени и соблюсти ограничения на последовательность (38) переключений.
10. Способ по любому из пп.1-6, в котором сдвиг по времени для первого перехода переключения последовательности (38) переключений определяют таким образом, чтобы он был как можно большим и соблюдались ограничения на последовательность (38) переключений.
11. Способ по любому из пп.1-6, в котором на этапе (б) по меньшей мере два перехода переключения с равными временами переключения вносят в последовательность переключений перед преобразованием последовательности (38) переключений.
12. Считываемый компьютером носитель, на котором записан элемент программы для управления конвертором, который при исполнении его по меньшей мере одним процессором, обеспечивает выполнение этапов способа в соответствии с любым из пп. 1-11.
13. Контроллер (18) для управления конвертором, характеризующийся тем, что выполнен с возможностью осуществления способа по любому из пп. 1-11.
14. Конвертор (12), содержащий схему (16) конвертора с переключателями, причем схема конвертора выполнена с возможностью формирования выходного напряжения по меньшей мере для одной фазы, и контроллер (18) для управления переключателями, причем контроллер выполнен с возможностью осуществления способа по любому из пп. 1-11.
| RU 2132110 C1, 20.06.1999 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ НАГРУЗКИ ПРЕИМУЩЕСТВЕННО ИНДУКТИВНОГО ТИПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2402145C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| СПОСОБ ГИБКИ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2201308C2 |
| JP 200827170 A, 06.11.2008 | |||
| US 6043624 A1, 28.03.2000 | |||
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ МУЛЬТИСЛОЙНЫХ ВАКУУМНО-ПЛАЗМЕННЫХ ПОКРЫТИЙ | 1995 |
|
RU2087585C1 |
| WO 2010122401 A1, 28.10.2010 | |||
| CN 101882799 A, 11.10.2010. | |||

