Изобретение относится к электромагнитному устройству для регулирования подачи тока к электростартеру двигателя внутреннего сгорания.
Предметом настоящего изобретения является электромагнитное устройство, содержащее:
опорный элемент, несущий два неподвижных контакта, предназначенных для соединения с источником напряжения и с электростартером;
опорную конструкцию, прикрепленную к опорному элементу и включающую: неподвижный стопорный элемент;
узел, подвижный относительно стопорного элемента и соединенный с центральной частью подвижного контакта, свободные концы которого могут взаимодействовать с неподвижными контактами для регулирования подачи тока к электрическому двигателю;
управляющий электромагнит, содержащий неподвижный соленоид и взаимодействующий подвижный сердечник, смещающийся за счет возбуждения соленоида из первоначального нерабочего положения в конечное положение, в котором он сталкивается со стопорным элементом, при этом подвижный сердечник перемещает вместе с собой подвижный узел таким образом, чтобы разместить концы подвижного контакта в упор с неподвижными контактами до того, как будет достигнуто конечное положение, причем подвижный контакт способен сгибаться по типу упругой балки при взаимодействии с неподвижными контактами [1]
В электромагнитных устройствах такого типа можно заметить, что когда подвижный сердечник ударяется в стопорный элемент, то передает большое усилие на опорный элемент, несущий неподвижные контакты. Последние, в частности начинают вибрировать относительно своего нормального рабочего положения с очень большими первоначальными ускорениями порядка 4000 g. Эти ускорения заставляют неподвижные контакты отделяться от подвижного контакта. Это явление, переходящее в увеличение сопротивления и соответствующее падение напряжения, подаваемого на стартерный электродвигатель, приводит к образованию электрической дуги или искрению между подвижным и неподвижными контактами, что может ухудшить их надежность и вызвать, так называемое "залипание".
В основу изобретения положена задача создания электромагнитного устройства вышеупомянутого типа, которое устраняет перечисленные проблемы.
Задача решается тем, что в электромагнитном устройстве указанного типа согласно изобретению подвижный контакт выполняется таким образом, что когда неподвижные контакты начинают вибрировать, то их концы следуют за перемещениями неподвижных контактов, при этом их ускорение в их собственном виде колебаний и их амплитуда колебаний больше, чем у неподвижных контактов.
На фиг. 1 изображено частичное осевое сечение электромагнитного устройства настоящего изобретения; на фиг. 2 перспективный вид подвижного контакта электромагнитного устройства, приведенного на фиг. 1.
На фиг. 1 показано электромагнитное устройство 1, использующееся, в частности для регулирования подачи тока к стартерному электродвигателю (не показан) двигателя внутреннего сгорания. Оно содержит известным образом чашеобразной формы опорный элемент 2, имеющий два отверстия 7, выполненные в его нижней стенке, через которые проходят два винта 5 из электропроводящего материала, например, предпочтительно меди.
Винты 5 имеют соответствующие головки 5а, упирающиеся в нижнюю стенку опорного элемента, и крепятся к этой стенке с помощью шайб 11, устанавливающихся с натягом на соответствующих резьбовых хвостовиках, выступающих с опорного элемента 2.
Винты 5 служат в качестве неподвижных контактов и предназначены для соединения один с источником напряжения постоянного тока, например, аккумуляторная батарея автомобиля, а другой с электростартером двигателя внутреннего сгорания.
Трубчатый металлический корпус 14 прочно крепится к опорному элементу 2, при этом его нижняя кромка зажата в наружной кольцевой выемке 2а, выполненной в верхней части опорного элемента 2.
Управляющий электромагнит 3 смонтирован в корпусе 14. Этот электромагнит включает стопорный и направляющий элемент 8, установленный в контакте с верхней кромкой опорного элемента 2 и имеющий осевой проход 8а.
Вокруг стопорного и направляющего элемента 8 установлен трубчатый каркас 9, на котором намотан управляющий соленоид 10.
Подвижный сердечник электромагнита 3 обозначен цифрой 15. Этот сердечник установлен так, чтобы перемещаться в осевом проходе, образованном в каркасе 9.
Стопорный и направляющий элемент 8 служит также в качестве неподвижного якоря, в который проходят некоторые линии магнитного потока, генерируемого возбуждением соленоида 10.
Подвижный узел 17 перемещается в осевом направлении в осевом проходе 8а стопорного и направляющего элемента 8.
Этот узел включает шток 18, снабженный головкой 19 на его конце, обращенным к опорному элементу 2.
Спиральная пружина 20 установлена в углублении 12 в опорном элементе 2 между нижней стенкой этого углубления и головкой 19 штока 18.
На другом конце штока 18 установлена неподвижная втулка 21, направляемая для скользящего перемещения в проходе 8а элемента 8.
Подвижный контактный элемент 22, имеющий по существу прямоугольную форму, установлен на штоке 18 между втулкой 21 и головкой 19.
Этот подвижный контакт имеет центральное гнездо 22а, через которое проходит шток 18 с установкой уплотнительного элемента 23.
Довольно жесткая спиральная пружина 24 установлена вокруг штока 18 между втулкой 21 и уплотнительным элементом 23. Эта пружина предварительно сжимается и смещает подвижный контакт 22 к головке 19 штока 18.
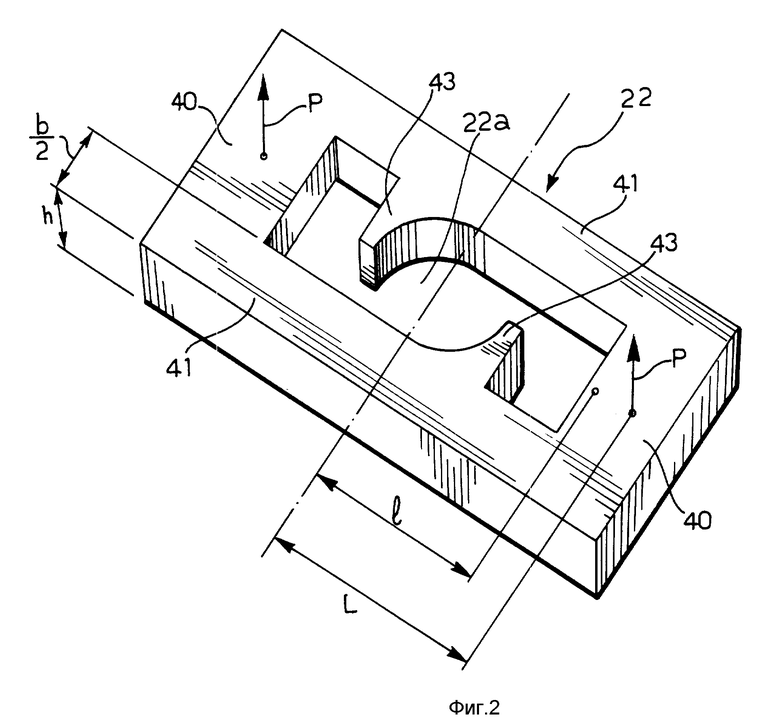
В варианте, представленном в качестве примера на фиг. 2, подвижный контакт 22 по существу имеет форму прямоугольной рамы, короткие стороны 40 которой обращены и предназначены для взаимодействия с неподвижными контактами 5а.
От лицевых внутренних поверхностей длинных сторон 41 подвижного контакта 22 отходят соответствующие выступы 43, образующие вместе гнездо или проход 22а, через который проходит шток 18 со взаимодействующим с ним уплотнительным элементом 23.
Как показано на фиг. 2, в представленном варианте выступы 43 на длинных сторонах подвижного контакта выполнены в соответствующих положениях, смещенных на противолежащих сторонах от центра подвижного контакта, и их обращенные кромки выполнены в виде дуг окружностей.
Подвижный контакт, описанный выше, может вырезаться из листа меди и обладает определенной упругой гибкостью. Этот подвижный контакт способен, в частности упруго изгибаться, как балка, когда его короткие стороны 40 вводятся до упора в неподвижные контакты 5а во время работы, как будет более понятно ниже.
Что касается известных устройств, при возбуждении управляющий соленоид 10 вынуждает сердечник 15 перемещаться в сторону подвижного узла 17. Тем самым сердечник 15 достигает штока 13 этого узла и смещает его в сторону неподвижных контактов 5а. После введения подвижного контакта 22 до упора с неподвижными контактами 5а подвижный сердечник 15 продолжает свое перемещение в сторону направляющего и стопорного элемента 8. Аналогично шток 18 продвигается в сторону нижней стенки опорного элемента 2, скользя относительно подвижного контакта 22, упирающегося в неподвижные контакты 5а, и сжимая спиральную пружину 24 между подвижным контактом 22 и втулкой 21.
Ход подвижного сердечника 15 заканчивается, когда он достигается конечного положения, в котором сердечник ударяется в направляющий и стопорный элемент 8.
В результате этого удара опорный элемент 2 и взаимодействующие неподвижные контакты 5 и 5а вибрируют относительно своих нормальных рабочих положений с довольно высоким начальным ускорением, которое может достигать величин порядка 4000 g.
В этом случае неподвижные контакты будут стремиться отделиться от концов 40 подвижного контакта 22.
Для устранения этой проблемы подвижный контакт выполнен в соответствии с изобретением таким образом, что когда неподвижные контакты начинают вибрировать, то два его свободных конца 40 способны следовать за перемещениями неподвижных контактов с ускорением своего естественного вида колебания и амплитудой колебания, большей чем у неподвижных контактов 5 и 5а.
Если амплитуду колебаний или смещения и ускорение неподвижных контактов 5а обозначить S и а, то соответственно и предположить, что в результате удара сердечника 15 в элемент 8 эти контакты подвергаются вибрации недемпфированного типа, тогда
a = Sω2sinωt ,
где t время;
ω = 2πf угловая частота колебаний;
f частота.
Ускорение принимает максимальную величину, равную
aмакс= Sω2= s(2πf)2.
Максимальное ускорение aмакс (пик ускорения) и частота f замеряются экспериментально.
В соответствии с настоящим изобретением подвижный контакт 22 должен иметь такой размер, чтобы его концы 40 могли перемещаться с ускорением a1макс, которое больше, чем максимальное ускорение aмакс неподвижных контактов
a1макс> S(2πf)2 = aмакс.
Ускорение a1 концов 40 зависит от собственной частоты вибрации подвижного контакта 22 и начального условия перемещения, соответствующего изгибу S1 подвижного контакта, обусловленного усилием, которое прикладывается к нему пружиной 24
a1= S1(2πf1)2sin(2πf1)t .
Максимальное ускорение a1макс равно
a1макс= S1(2πf1)2.
Чтобы избежать отделение подвижного контакта 22 от неподвижных контактов 5, необходимо, чтобы смещение неподвижных контактов было меньше, чем смещение концов 40 подвижного контакта 22, которое в лучшем случае может достигать величины S1 вследствие статического отклонения.
Если усилие, прикладываемое к подвижному контакту 22 пружиной 24, обозначить 2P, то реакция величиной P (фиг. 2) образуется в точках соприкосновения этого подвижного контакта с неподвижными.
Если расстояние между центральной линией подвижного контакта и точками, в которых он контактирует с неподвижными контактами, обозначить L, то смещение S1 определяется известной формулой
где E модуль упругости подвижного контакта;
J момент его инерции.
Частота колебаний концов подвижного контакта определяется
f1= 2πω1 = 2πVC1/M1 ,
где M1 равно половине массы подвижного контакта;
C1 является ее жесткостью, которая определяется, как
где (фиг. 2) b равняется двойной ширине длинных сторон 41 подвижного контакта;
h толщина подвижного контакта;
l расстояние между центральной линией подвижного контакта и точкой приложения результирующей бесконечно малых сил инерции dp, действующих на каждую бесконечно малую часть балки, осуществляющей колебательное перемещение. В случае с простой балкой это расстояние равно порядка 4l/5.
Использованная формула справедлива для случая контакта простого типа, соответствующего тому, что имеет место у простой балки.
На практике этот расчет производится с помощью метода конечного элемента.
После экспериментального определения максимального ускорения aмакс и частоты f (или угловой частоты ω) колебательного перемещения и подвижных контактов 5а, вышеприведенные выражения позволяют выполнить подвижный контакт 22 таких размеров, чтобы удовлетворялась следующая зависимость:
S1 > S и a1 > 2.
Если подвижный контакт 22 выполнен таким образом, что удовлетворяет этим условиям, тогда, когда неподвижные контакты 5а начинают колебаться, то его концы начинают действительно следовать за неподвижными контактами, не теряя контакта с ними.
Таким образом, возможность образования искрения или дуги устраняется как и опасность повреждения неподвижных контактов и/или подвижного контакта.
Естественно принципы изобретения остаются прежние, варианты и детали конструкции могут широко изменяться в отношении тех, что были описаны и показаны в качестве примера, но они не отклоняются от задачи изобретения.
Использование: электромагнитные устройства для регулирования подачи тока к электростартеру двигателя внутреннего сгорания. Сущность изобретения: устройство содержит два неподвижных контакта, подвижный узел, соединенный с центральной частью подвижного контакта, свободные концы которого могут взаимодействовать с неподвижными контактами, и управляющий электромагнит, содержащий соленоид и подвижный сердечник, смещающийся из начального нерабочего положения в конечное положение, в котором он ударяется в стопорный элемент, несущий с собой подвижный узел так, чтобы разместить конец подвижного контакта относительно неподвижных контактов до достижения конечного положения. Подвижный контакт может упруго изгибаться как балка под действием своего взаимодействия с неподвижными контактами. Когда сердечник ударяется в стопорный элемент, то неподвижные контакты вибрируют относительно своих нормальных рабочих положений. Подвижный контакт выполняется таким образом, чтобы когда неподвижные контакты начинают вибрировать, то его свободные концы следуют за перемещениями неподвижных контактов, их ускорение в их собственном виде колебания больше чем ускорение неподвижных контактов и их амплитуда колебания больше чем амплитуда колебания неподвижных контактов. 3 з.п. ф-лы, 2 ил.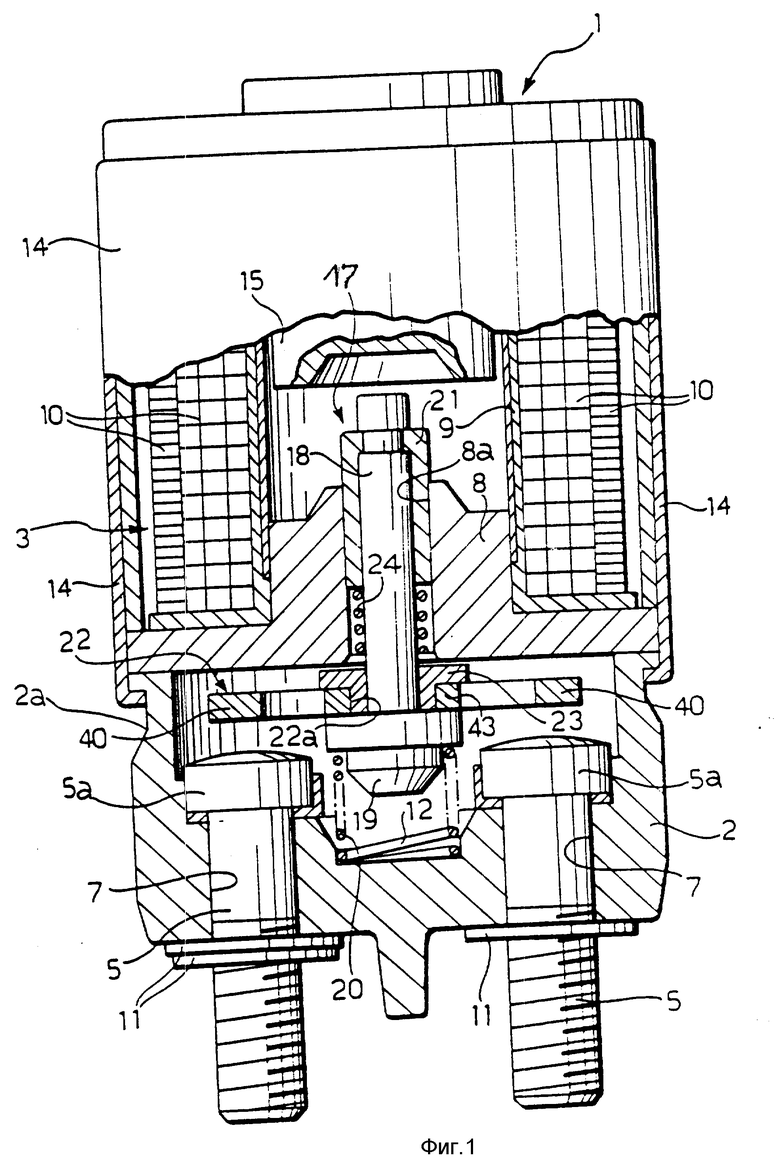
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| EP, заявка, 0324262, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

