Изобретение относится к светотехнике и может быть использовано при проведении театральных спектаклей и других представлений для непрерывного локального освещения движущихся объектов на сценических площадках.
Решение такого рода задачи требует слежения за движущимся объектом и наведения на него соответствующим образом сфокусированного луча осветительного прибора (прожектора). Известны устройства радиолокационного слежения за удаленными движущимися объектами [1 и 2] эти устройства (радиолокационные станции, системы) рассчитаны на значительную дальность действия и потому весьма громоздки. Известны устройства фиксации положения и измерения параметров движения спортсменов в залах и на стадионах [3 и 4] требующие стационарного размещения датчиков на полу зала или на поле стадиона под специальным покрытием, что неприемлемо, например, при использовании движущихся (вращающихся) частей сцены.
При проведении зрелищных мероприятий обычно используются переносные или стационарные устанавливаемые прожекторы, управление лучем которых осуществляется человеком-оператором (осветителем). Наиболее совершенным устройством такого рода, выбранным в качестве прототипа, является осветительный прибор ПрТП-У [5] функциональная схема которого представлена на фиг. 1. Устройство-прототип содержит прожектор (Пр) 1 и механически связанные с ним угломестный электропривод (УЭ) 2, азимутальный электропривод (АЭ) 3 и фокусировочный электропривод (ФЭ) 4, входы которых подключены к трем выходам пульта ручного управления (ПРУ) 5. При использовании указанного устройства точность светового сопровождения движущегося объекта существенно зависит от субъективных качеств осветителя, его состояния, и при высоких скоростях перемещения объекта зачастую оказывается неудовлетворительной; кроме того, одновременная регулировка луча по трем параметрам (угол места, азимут, радиус светового пятна) является для осветителя весьма сложной процедурой.
Задача, решаемая изобретением, состоит в создании автоматизированного устройства для светового сопровождения движущихся объектов на сценических площадках, обеспечивающего гарантированную точность сопровождения в диапазоне возможных скоростей перемещения объектов.
Для решения поставленной задачи используются, как и в прототипе, прожектор и механически связанные с ним угломестный электропривод, азимутальный электропривод и фокусировочный электропривод. Но в отличие от прототипа в заявляемое устройство введены: передатчик, помещаемый на движущийся объект; угломестная антенная система, азимутальная антенная система и датчик угла места, закрепляемые на прожекторе; угломестный двухканальный приемный тракт, два входа которого подключены к двум выходам угломестной антенной системы, и азимутальный двухканальный приемный тракт, два входа которого подключены к двум выходам азимутальной антенной системы; вычислитель, имеющий внешний вход для ввода установочных параметров H, h, r, четыре входа, подключенные к двум выходам угломестного двухканального приемного тракта и двум выходам азимутального двухканального приемного тракта, вход, подключенный к выходу датчика угла места, и три выхода, подсоединенные к трем входам трехканального формирователя управляющих сигналов; трехканальное электронное реле, имеющее управляющий вход, три пары входов, покдлюченных к трем выходам трехканального формирователя управляющих сигналом и к трем выходам пульта ручного управления, и три выхода, подсоединенные к входам угломестного электропривода, азимутального электропривода и фокусировочного электропривода.
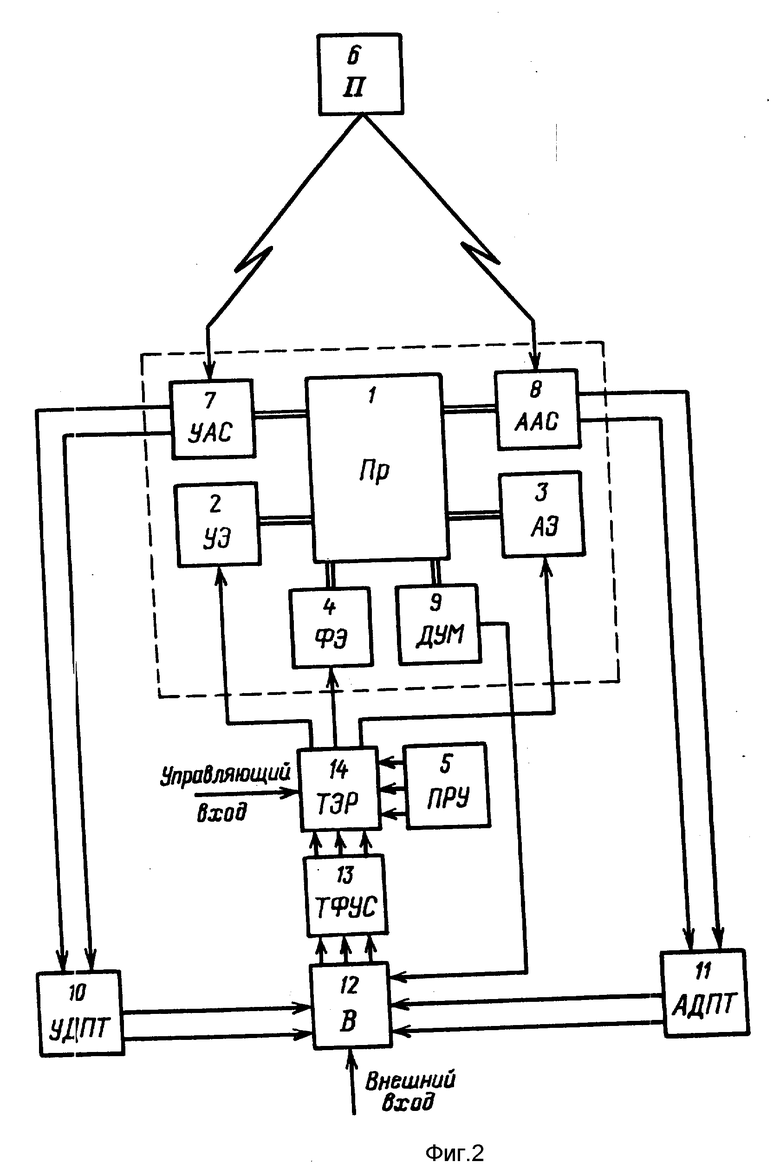
На фиг. 2 схема устройства.
В состав предлагаемого устройства входят прожектор 1 и механически связанные с ним угломестный электропривод 2, азимутальный электропривод 3 и фокусировочный электропривод 4; передатчик (П) 6, помещаемый на движущийся объект; угломестная антенная система (УАС) 7, азимутальная антенная система (ААС) 8 и датчик угла места (ДУМ) 9, закрепляемые на прожекторе 1; угломестный двухканальный приемный тракт (УДПТ) 10, два входа которого подключены к двум выходам УАС 7, и азимутальный двухканальный приемный тракт (АДПТ) 11, два входа которого подключены к двум выходам ААС 8; вычислитель (В) 12, имеющий внешний вход для ввода установочных параметров H, h, r, четыре входа, подключенные к двум выходам УДПТ 10 и двум выходам АДПТ 11, вход, подключенный к выходу ДУМ 9, и три выхода, подсоединенные к трем входам трехканального формирователя управляющих сигналов (ТФУС) 13; трехканальное электронное реле (ТЭР) 14, имеющее управляющий вход, три пары входов, подключенных к трем выходам ТФУС 13 и к трем выходам пульта ручного управления (ПРУ) 5, и три выхода, подсоединенные к входам УЭ 2, АЭ 3 и ФЭ 4.
Предлагаемое устройство работает следующим образом.
При установке прожектора 1 измеряется его высота над сценической площадкой и ее значение H вводится через внешний вход в вычислитель 12; на этом же этапе производится юстировка ДУМ 9 по горизонтали. Перед началом осветительной операции в вычислитель 12 вводится значение h высоты закрепления передатчика 6 на объекте и требуемое значение r радиуса светового пятна в зоне освещаемого объекта. Последовательный ввод установочных параметров, снабженных адресами соответствующих ячеек памяти, может производиться с помощью буквенно-цифровой клавиатуры.
Передатчик 6 включается непосредственно перед появлением освещаемого объекта на сценической площадке или перед переходом с общего на локальное освещение. При этом осветитель с помощью ПРУ 5 осуществляет грубое (в пределах областей захвата угломестной и азимутальной следящих систем) наведение луча прожектора 1 на объект, после чего воздействием на ТЭР 14 по управляющему входу отключает выходы ПРУ 5 от входов УЭ 2, АЭ3 и ФЭ 4, подключая к ним выходы ТФУС 13 и переводя тем самым устройство в автоматический режим.
Непрерывный гармонический сигнал, излучаемый ненаправленной антенной передатчика 6, поступает на УАС 7 и ААС8, формирующие необходимые для реализации равносигнального амплитудного метода пеленгации [1 и 2] двухлепестковые диаграммы направленности (ДН) соответственно в вертикальной и горизонтальной плоскостях и имеющие выходы по каждому из лепестков. Сигналы с этих выходов раздельно усиливаются и далее детектируются в каналах УДПТ 10 и АДПТ 11, представляющих собой типовые по функциональному назначению приемные тракты [6]
Напряжения с выходов УДПТ 10 и АДПТ 11, пропорциональные уровням сигналов с соответствующих лепестков ДН, поступают на вычислитель 12. К нему же подводится напряжение от ДУМ 9, пропорциональное углу места. В вычислителе 12 производятся аналого-цифровое преобразование поступающих напряжений и запрограммированные математические операции для определения рассогласований по углу места и азимуту, а также требуемой ширины луча.
Вычислительные операции, обеспечивающие слежение за объектом по углу места и азимуту, определяются методом обработки сигналов от пар лепестков ДН антенн. Наиболее прост и удобен суммарно-разностный метод [1 и 2] когда рассогласования определяются выражениями
где Xy1, Xy2 и Xa1, Xa2 -пары сигналов, поступающие в вычислитель 12 от УДПТ 10 и АДПТ 1.
При заданных значениях H, h и r с помощью геометрического построения легко получить, что необходимая угловая ширина луча, достигаемая фокусировкой, определяется как функция ε в виде
где угол места ε отсчитывается от горизонтали на высоте H.
Таким образом, алгоритм математических операций, выполняемых в вычислителе 12, определяется выражениями (1), (2) и (3).
В ТФУС 13 значения xу, ξa, Φ с помощью функционального цифроаналогового преобразования трансформируются в сигналы Uу(ξу), Ua(ξa), Uф(Φ), управляющие УЭ2, АЭ3 и ФЭ4.
По завершении локального светового сопровождения осветитель с помощью ТЭР 14 возвращает устройство в режим ручного управления.
Таким образом, за счет автоматического управления устройством достигается надежное обеспечение заданной точности светового сопротивления движущихся объектов на сценических площадках.
Излучение сигналов передатчиком 6 может производится в различных диапазонах волн: на УКВ, ультразвуке и (при соблюдении необходимых экологических норм) в СВЧ-диапазоне. В первом случае УАС 7 и ААС 8 могут состоять из пар малогабаритных пространственно взаимно смещенных рамочных антенн, подобных используемым в аппаратуре спортивных состязаний "охота на лис". При работе на сантиметровых волнах в ультразвуке или СВЧ УАС 7 и ААС 8 целесообразно выполнять в виде линейных фазированных антенных решеток, располагаемых соответственно по вертикали и по горизонтали. Формирование в них двухлепестковых ДН достигается весовой обработкой сигналов, снимаемых с элементов решеток [7] При минимальном радиусе светового пятна r 0,5 м и максимальном удалении объекта от прожектора 1 порядка 25 м требуемая длина антенных решеток не превысит 0,5 0,7 м. Реализация передатчика 6, УДПТ 10, АДПТ 11, вычислителя 12, ТФУС 13 и ТЭР 14 не представляет трудностей на современной радиоэлектронной элементной базе. В качестве ДУМ 9 может быть использован потенциометрический датчик.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| СВЧ СТЕРЕОРАДАР ДЛЯ СЛЕПЫХ | 2018 |
|
RU2679470C1 |
| МАТРИЧНАЯ РЛС ОХРАНЫ ПЛОЩАДИ | 2019 |
|
RU2718954C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| РАДИОМЕТРИЧЕСКИЙ КОМПЛЕКС | 2016 |
|
RU2619916C1 |
| МОНОИМПУЛЬСНАЯ ТРЕХКАНАЛЬНАЯ СУММАРНО-РАЗНОСТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2005 |
|
RU2296347C2 |
| АНТЕННО-ПРИЕМОПЕРЕДАЮЩАЯ СИСТЕМА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2000 |
|
RU2165665C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291466C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РЛС ПО АЗИМУТУ И ДАЛЬНОСТИ И УМЕНЬШЕНИЯ ВРЕМЕНИ СКАНИРОВАНИЯ НАЗЕМНЫХ ОБЪЕКТОВ ПРИ ПОСАДКЕ САМОЛЕТА И ПРИЕМНОЕ УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2018 |
|
RU2682169C1 |
Сущность изобретения: устройство содержит прожектор (ПР) и механически связанные с ним угломестный электропривод (УЭ), азимутальный электропривод (АЭ) и фокусировочный электропривод (ФЭ); передатчик (П), помещаемый на движущий объект; угломестную антенную систему (УАС), азимутальную антенную систему (ААС) и датчик угла места (ДУМ), закрепляемые на прожекторе; угломестный двухканальный приемный тракт (УДПТ), два входа которого подключены к двум выходам (УАС), и азимутальный двухканальный приемный тракт (АДПТ), два входа которого подключены к двум выходам (ААС), вычислитель (В), имеющий внешний вход для ввода установочных параметров, четыре входа, подключенные к двум выходам УДПТ и двум выходам АДПТ, вход подключенный к ДУМ, и три выхода, подсоединенные к трем входам трехканального формирователя управляющих сигналов (ТФУС); трехканальное электронное реле (ТЭР), имеющее управляющий вход, три пары входов, подключенных к трем выходам ТФУС и к трем выходам пульта ручного управления (ПРУ), и три выхода, подсоединенные к входам УЭ, АЭ и ФЭ. За счет автоматического управления лучом прожектора устройство обеспечивает заданную точность светового сопровождения движущихся объектов на сценических площадках. 2 ил.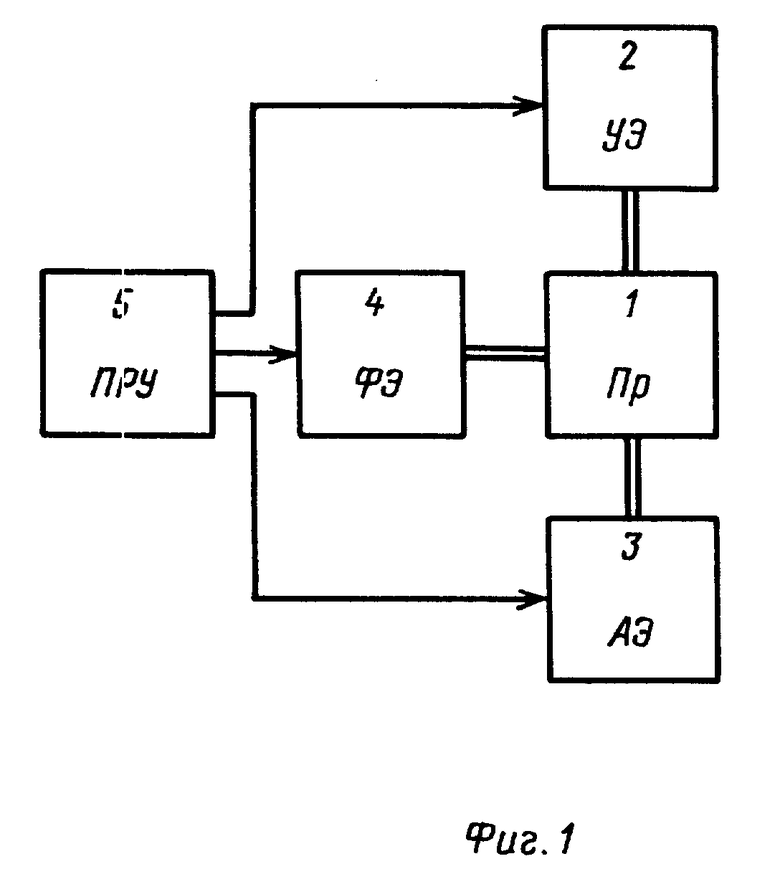
Устройство для светового сопровождения объектов на сценических площадках, содержащее прожектор и механически связанные с ним угломестный, азимутальный и фокусировочный электроприводы, отличающееся тем, что в него введены передатчик, помещаемый на освещаемый объект, угломестная антенная система, азимутальная антенная система и датчик угла места, закрепляемые на прожекторе, угломестный двухканальный приемный тракт, два входа которого подключены к двум выходам угломестной антенной системы, и азимутальный двухканальный приемный тракт, два входа которого подключены к двум выходам азимутальной антенной системы, вычислитель, имеющий внешний вход для ввода установочных параметров, четыре входа, подключенных к двум выходам угломестного и двум выходам азимутального двухканальных приемных трактов, вход, подключенный к выходу датчика угла места, три выхода, подсоединенные к трем входам трехканального формирователя управляющих сигналов, и выполняющий функции запоминания установочных параметров, аналого-цифрового преобразования входных сигналов, определения необходимой угловой ширины светового луча и величин сигнальных рассогласований по углу места и по азимуту, трехканальное электронное реле, имеющее управляющий вход, три пары входов, подключенных к трем выходам трехканального формирователя управляющих сигналов и к трем выходам пульта ручного управления, и три выхода, подсоединенных к входам угломестного, азимутального и фокусированного электроприводов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сайбель А.Г | |||
| Основы радиолокаций | |||
| - М.: Сов.радио, 1961 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Коростелев А.А., Клюев Н.Ф., Мельник Ю.А | |||
| и др | |||
| Теоретические основы радиолокации | |||
| / Под ред | |||
| В.Е.Дулевича | |||
| - М.: Сов.радио, 1978 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, авторское свидетельство, 1995824, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| SU, авторское свидетельство, 1140803, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Технический паспорт на устройство ПрТП-У | |||
| - Черкассы, 1978 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аминатов И.М., Антонов-Антипов Ю.Н., Васильев В.П | |||
| и др | |||
| Радиоприемные устройства | |||
| / Под ред | |||
| В.И | |||
| Сифорова | |||
| - М.: Сов.радио, 1974 | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Антенные решетки | |||
| / Под ред | |||
| Л.С.Бененсона | |||
| - М.: Сов.радио, 1966. | |||
