Изобретение относится к СВЧ радиолокационным способам охраны площадей территории с использованием принципов многопозиционной радиолокации.
Среди существующих охранных РЛС систем Ограниченного радиуса действия различают 2 вида (фиг. 1):
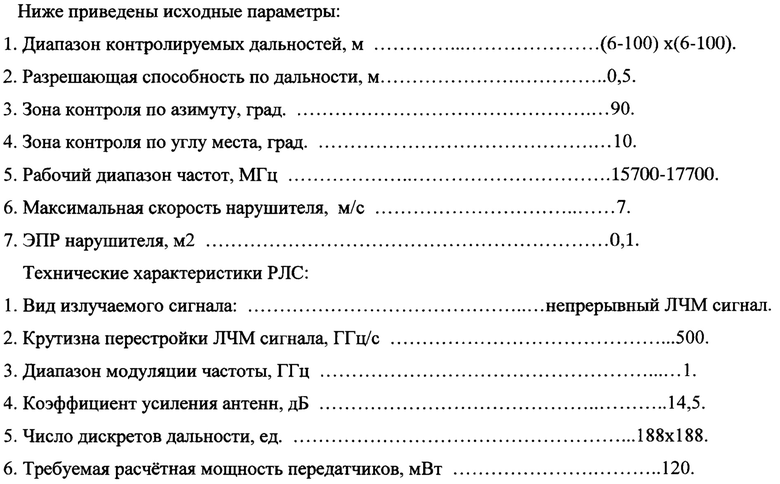
- двухпозиционные радиолучевые, состоящие из передатчика, формирующего узкий луч, и отнесенного приемника, фиксирующего изменение принимаемого сигнала при пересечении луча нарушителем при ширине луча 1,5-5,0 м и дальностях до 300-500 м. (фиг. 1а);
- однопозиционные, состоящие из одного приемопередатчика, формирующего широкий луч, освещающий охраняемую территорию с площадями 25-350 м2. (фиг.1б)
Оба вида систем подают сигнал тревоги, не определяя координаты нарушителя в пределах охраняемых зон.
Охранные системы больших радиусов действия (сотни и тысячи метров) с определением координат целей, отличает техническая сложность устройств обработки параметров обнаруживаемых объектов и, соответственно, стоимость.
Профессиональные требования к различным видам охранных устройств отражены в «Рекомендациях по использованию технических средств обнаружения, основанных на различных физических принципах, для охраны огражденных территорий и открытых площадок (Р78.36.026-2012. МВД РФ, Главное Управление Вневедомственной Охраны, НИЦ «Охрана», 2012 г).
Известно техническое решение радиолокационного модуля и извещателя охраны на его основе (патент РФ №2406154 С1; МПК: G08B 13/18, G01S 13/00; 03.04.2009), в котором представлена попытка улучшения распознаваемости поведения нарушителя. В этом варианте радиолучевого охранного устройства антенны передатчика и приемника делаются двухлучевыми, благодаря чему обеспечивается возможность определять направление движения нарушителя: "на" или "из" территории.
Недостатком этого технического решения является отсутствие определения координат нарушителя.
Наиболее близким к сущности заявленного изобретения является техническое решение, выпускаемое фирмой Umirs Радар-Сенсор АГАТ-СП5У с линейной частотной модуляцией зондирующего сигнала (Извещатель охранный радиоволновый «АГАТ-СП5У». Руководство по эксплуатации ЮСДП425144.003-03РЭ. http://www.umirs-m.ru/wp-content/uploads/2012/03/re-agat-sp5ul-2008.pdf).
Согласно описанию принцип действия извещателя основан на методе линейной частотной модуляции, широко используемым в радиолокации, где рабочая частота генератора линейно изменяется в небольших пределах. Сверхвысокочастотный передатчик приемопередающего модуля излучает в направлении охраняемой зоны электромагнитные колебания, которые отражаясь от цели и окружающих предметов, попадают на сверхвысокочастотный приемник приемопередающего модуля.
Изменения принятого сигнала, вызванные доплеровским эффектом при движении нарушителя в зоне обнаружения, усиливаются и обрабатываются по заданному алгоритму. Если изменения превышают пороговое значение, происходит выдача сигнала тревоги.
Применение в извещателе метода ЛЧМ с разделением зоны обнаружения на 12 подзон позволило повысить помехоустойчивость и увеличить запас времени на ложное срабатывание.
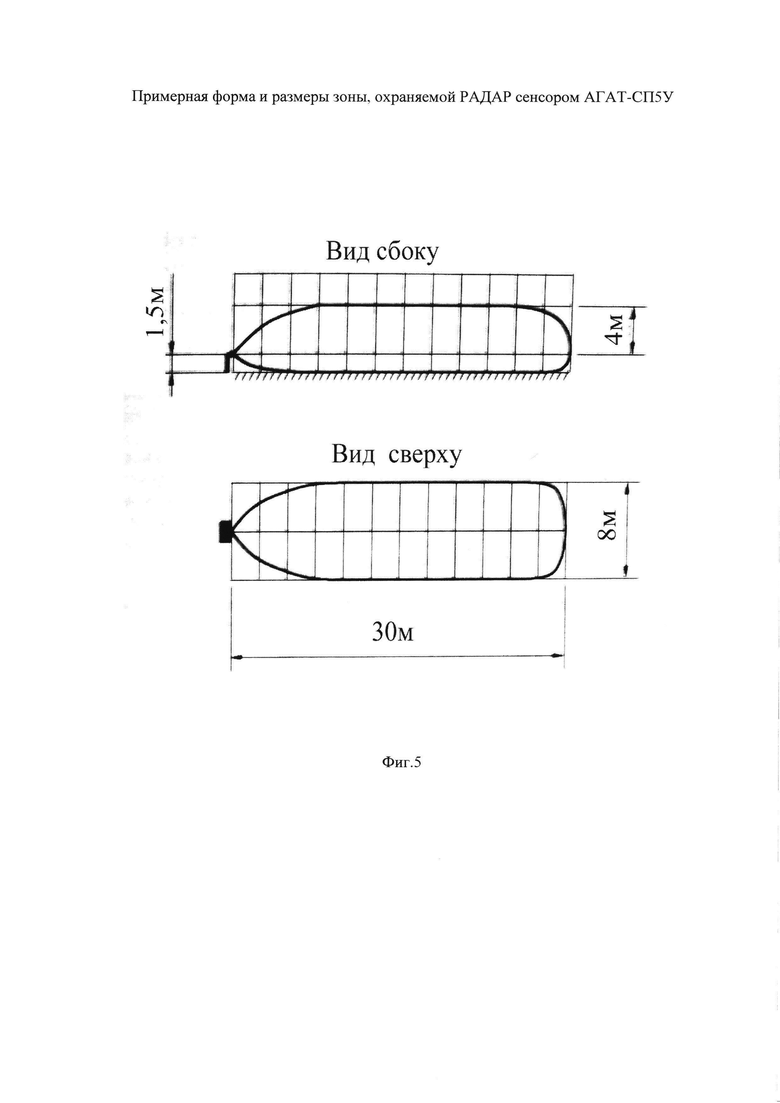
Согласно описанию Радар АГАТ-СП5У радиолокационным лучом освещает территорию площадью не менее 30×8 м, причем она разбивается на 12 участков размерами 2,5×8 м. (фиг. 5).
Недостатком этого технического решения является низкая точность определения координат нарушителя (2,5×8 м, 20 м2).
Технический результат, достигаемый заявленным изобретением, заключается в том, что предлагаемый способ обеспечивает не только установление факта пересечения границы охраняемой зоны, но и определяет координаты нарушителя и позволяет отслеживать его перемещения причем это достигается в реальном масштабе времени без применения вычислительных средств, механического или электронного сканирования лучей РЛС.
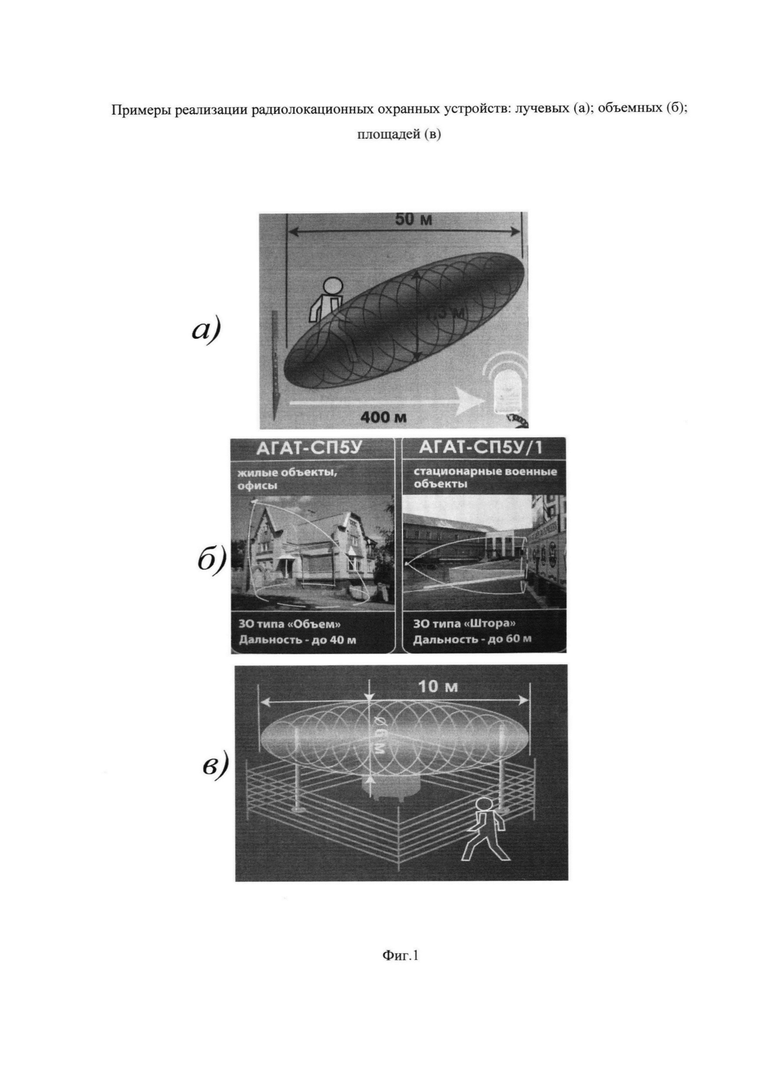
Технический результат достигается за счет использования 2-х активных дальномерных РЛС с ЛЧМ сигналами, разнесенных по одному краю охраняемой территории (фиг. 2), причем каждая из них облучает всю охраняемую территорию плоским широким в азимутальных углах (60-150 град) и узким в угломестной плоскости (5-10 град.) лучом, а оси направленности антенн при этом пересекаются примерно под углом 90 градусов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 показывает примеры реализации радиолокационных охранных устройств: лучевых (а); объемных (б) и площадей (в).
Фиг. 2 раскрывает Принцип действия матричной РЛС.
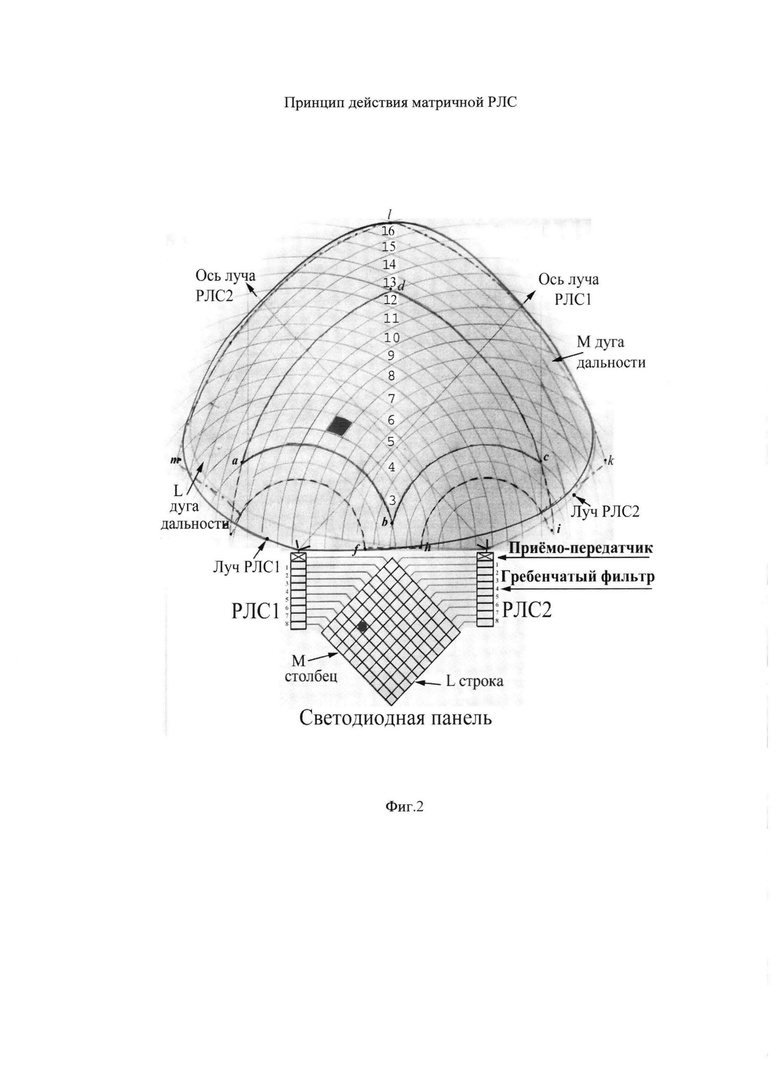
Фиг. 3 описывает Принципиальная схема светодиодной индикаторной матрицы из М столбцов на L строк.
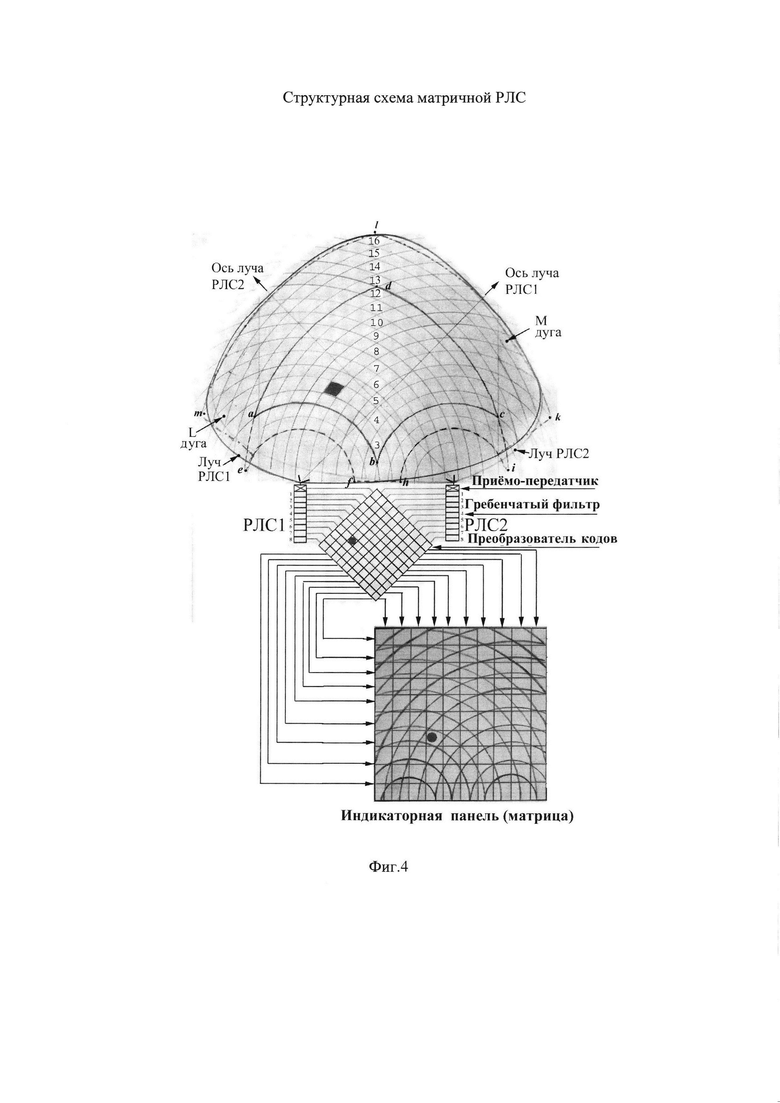
Фиг. 4 раскрывает структурную схему матричной РЛС.
Фиг. 5 показывает примерную форму и размеры зоны, охраняемой РАДАР сенсором АГАТ-СП5У.
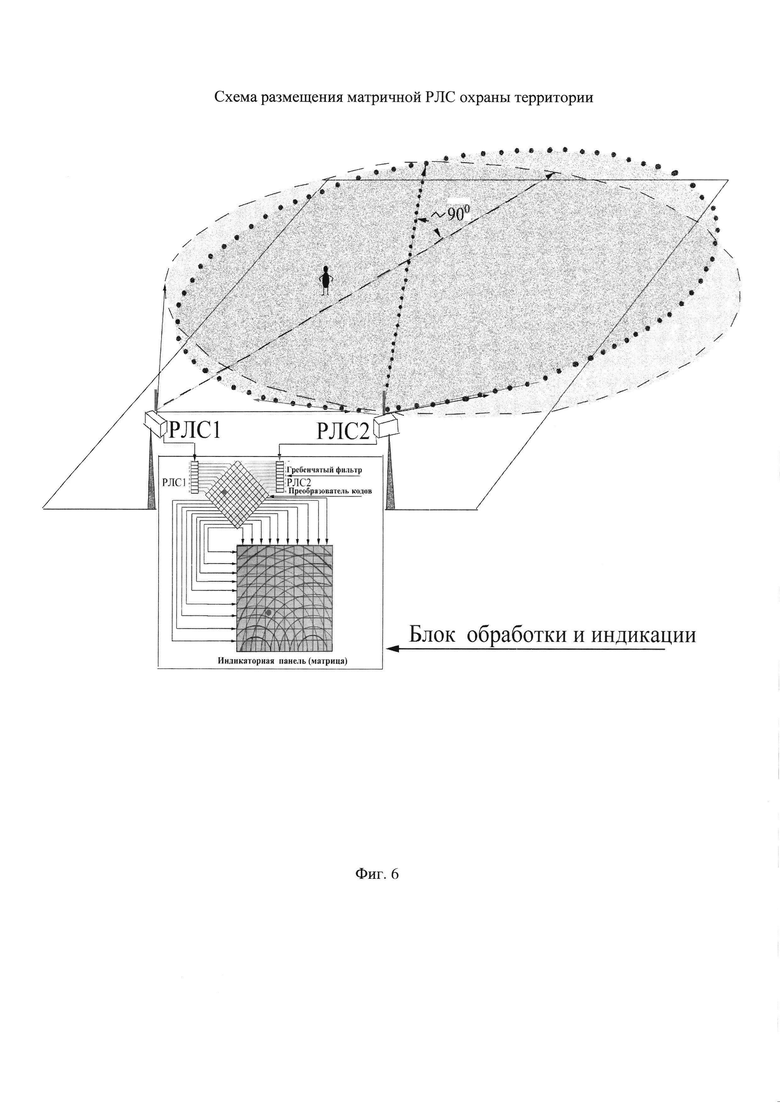
Фиг. 6 раскрывает схему размещения матричной РЛС охраны территории.
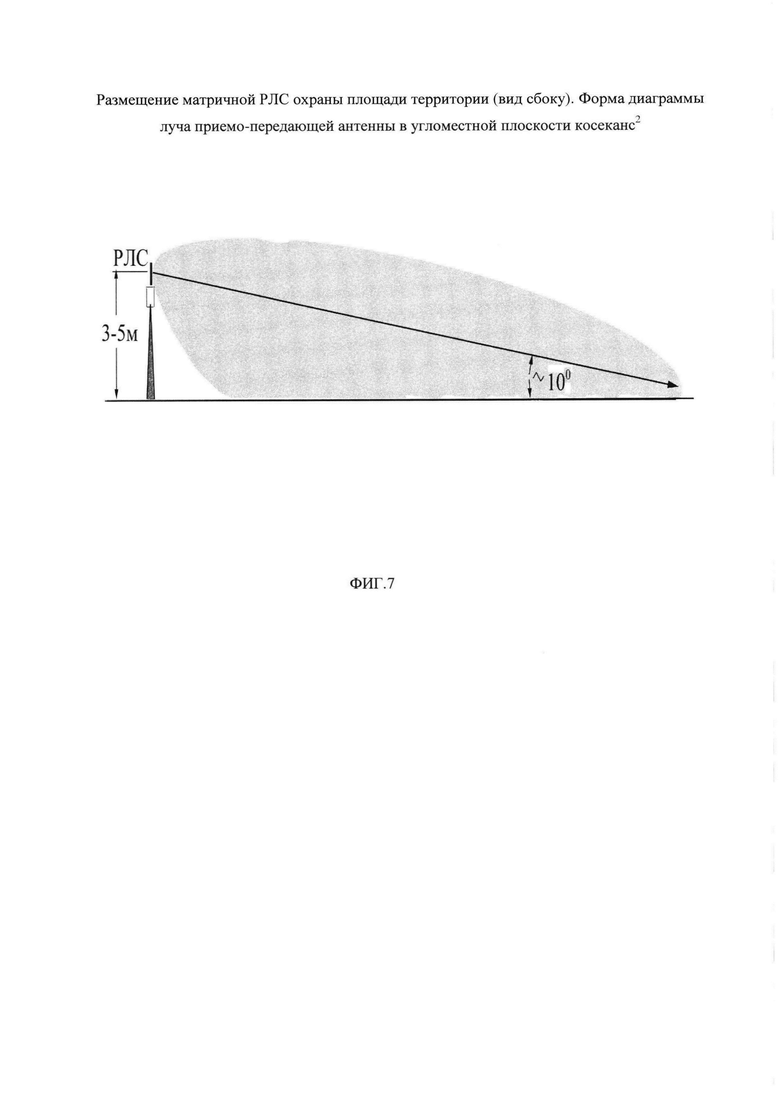
Фиг. 7 описывает размещение матричной РЛС охраны площади территории (вид сбоку).
Форма диаграммы луча приемо-передающей антенны в угломестной плоскости косеканс2
Сущность настоящего технического решения заключается в том, что, как известно, в РЛС с ЛЧМ сигналами частота сигнала на выходе приемника зависит от дальности до отражающей цели. Если к выходу приемника РЛС подключить гребенчатый фильтр с набором состыкованных по полосам фильтров с полосами каждого с желаемой разрешающей способностью по дальности, то можно в реальном времени одновременно получать информацию обо всех целях, находящихся в луче РЛС.
Поскольку в рассматриваемом случае азимутальная ширина луча велика, виртуальные зоны обнаружения целей для каждой дальности выглядят в виде дуг дальностей для каждой РЛС.
Благодаря ортогональному положению лучей совмещенная сетка обоих РЛС образует поле (матрицу) из прямоугольных (ромбовидных) микрообластей, величины которых определяют точность определения координат целей.
Излучаемые СВЧ ЛЧМ сигналы каждой РЛС образуют сетки взаимно пересекающихся дуг дальностей в полярных координатах, причем каждой дуге дальности соответствует своя частота дальности на выходах гребенчатых фильтров, подключенных к выходам приемников РЛС (фиг. 2).
Так как координатные сетки независимы друг от друга, для выявления положения цели необходимо выполнить операцию поэлементного перемножения строк и столбцов. Это обеспечивается следующим образом.
Если N выходов гребенчатого фильтра одной РЛС подключить к N входам строк ортогональной светодиодной индикаторной матрицы, а N выходов гребенчатого фильтра второй РЛС подключить к N входам столбцов той же индикаторной матрицы (рис. 3), то при наличии сигналов отражения от цели в L строке и М столбца дугах дальностей РЛС1 и РЛС2, в точке их пересечения произойдет совпадение сигналов и возникнет сигнал тревоги (световой, звуковой и т.п.).
Вместо светодиодной матрицы могут быть применены LCD или TFT дисплеи, что существенно сложнее и дороже.
При этом реальное восприятие территории и цели и их отображение на индикаторной панели будут комплементарны, т.е. каждой точке одного изображения будет соответствовать однозначная точка другого, но выглядеть они будут несколько различно. Связано это с тем, что изображения территории отображены в полярных, а изображение на панели в декартовых координатах. При этом «искаженным» будет выглядеть изображение на индикаторной панели.
Для приведения в соответствие изображения с реальностью, необходимо провести перекодировку кодов полярных координат в декартовы, что может быть выполнено с помощью специальной платы преобразования кодов практически мгновенно (фиг. 4).
Практическая реализация предлагаемого способа охраны территории может быть представлена следующим образом.
На одной из границ охраняемой территории на мачтах высотой 3-5 м устанавливаются приемопередающие блоки РЛС с антеннами с шириной диаграмм лучей в азимутальной плоскости 60-90 градусов и осями лучей антенн, ориентированными под углами относительно границы охраняемой зоны 45 градусов (фиг. 6). При этом диаграммы антенн РЛС 1 и 2 облучают охраняемую территорию, а оси их антенн пересекаются под углом порядка 90 градусов (фиг. 6).
В угломестной плоскости оси лучей антенн должны быть направлены под углом, примерно, минус 5-10 градусов относительно горизонта (зависит от конкретных условий), при форме диаграммы направленности косеканс2, для равномерного облучения охраняемой территории (фиг. 7).
Выходные сигналы приемников РЛС 1 и 2 по коаксиальным кабелям подаются на блок обработки и индикации, содержащий гребенчатые фильтры, преобразователь кодов, матричную индикаторную матрицу, извещатели тревоги, блоки питания.
Для предотвращения взаимных помех рабочие частоты РЛС 1 и 2 должны быть разнесены на величину в 3-5 раз большую, чем значения частот, соответствующих, максимальному значению дальности контроля.
Предлагаемая матричная РЛС обеспечивает:
1. Охрану площадей в десятки раз больших, чем существующие охранные системы (до 100×100 метров).
2. Определение координат нарушителя с разрешением не хуже 0,5 м.
3. Определение координат предоставляет возможность автоматизации наведения прожекторов, фото- и видеокамер, а в случае необходимости и оружия в точку нарушения с целью документирования факта нарушения или огневого поражения.
4. Возможно «цепочечное» размещение матричных РЛС для формирования защитной полосы глубиной 100 и более метров необходимой протяженности.
5. Обзор всей охраняемой зоны ведется непрерывно, параллельно без использования последовательного сканирования узким лучем (механическим или АФАР), что исключает возможные пропуски нарушения.
Предлагаемая система обеспечивает возможность обнаружения и сопровождения одиночного нарушителя. При наличии нескольких нарушителей возможна индикация ложных целей. Способ борьбы с этим явлением известен и заключается в периодическом изменении крутизны перестройки частоты ЛЧМ сигнала (Joonhong Park and other. 76-81-GHz CMOS Transmitter With a Phase-Locked-Loop-Based Multichirp Modulator for Futomotive Radar. IEEE transactions on microwave theory and techniques, vol. 63, no. 4, april 2015. Pp. 1399-1407).
Для оценки реализуемости предлагаемой системы охраны проведены расчеты параметров РЛС в предусмотренном Регламентом Радиосвязи РФ диапазоне 15700-17700 МГц.
Как следует из расчетов предлагаемые РЛС могут быть реализованы
Таким образом, существенные признаки данного технического решения позволяют существенным образом повысить точность определения координат нарушителя, что обеспечивает достижение заявленного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РЛС ПО АЗИМУТУ И ДАЛЬНОСТИ И УМЕНЬШЕНИЯ ВРЕМЕНИ СКАНИРОВАНИЯ НАЗЕМНЫХ ОБЪЕКТОВ ПРИ ПОСАДКЕ САМОЛЕТА И ПРИЕМНОЕ УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2018 |
|
RU2682169C1 |
| Радиолокационно-лучевая система охраны периметров протяженных объектов и контроля за прилегающей территорией | 2019 |
|
RU2724805C1 |
| РАДИОЛОКАЦИОННЫЙ МОДУЛЬ И ИЗВЕЩАТЕЛИ ОХРАНЫ НА ЕГО ОСНОВЕ | 2009 |
|
RU2406154C1 |
| МОБИЛЬНАЯ РАДИОЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА | 2023 |
|
RU2817396C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ЗОНУ | 1998 |
|
RU2133046C1 |
| Комбинированный комплекс физической защиты объектов, территорий и прилегающих акваторий с автоматизацией процессов охраны для сокращения численности людских ресурсов по его обслуживанию | 2021 |
|
RU2792588C1 |
| СПОСОБ ОХРАНЫ ОБЪЕКТОВ ОТ ПРОНИКНОВЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМЫХ МАЛОРАЗМЕРНЫХ МАЛОВЫСОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ТИПА БПЛА) | 2019 |
|
RU2744497C2 |
| УСТРОЙСТВО ОПТИМИЗАЦИИ ВЕСОВЫХ КОЭФФИЦИЕНТОВ СЛЕДЯЩЕЙ ФИЛЬТРАЦИИ | 2022 |
|
RU2805171C1 |
| Интегрированная система безопасности на основе автоматизированных функциональных систем и подсистем | 2022 |
|
RU2794559C1 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2006 |
|
RU2333508C1 |
Изобретение относится к СВЧ радиолокационным способам охраны площадей территории. Технический результат - обеспечение определения координаты нарушителя и его перемещения в реальном масштабе времени. Используются располагаемые на краю охраняемой территории две активные дальномерные РЛС с ЛЧМ сигналами, разнесенными по одному краю охраняемой территории, причем каждая из них облучает всю охраняемую территорию плоским широким в азимутальных углах 60-150 град и узким в угломестной плоскости 5-10 град лучом, а оси направленности антенн при этом пересекаются под углом 90 град. Обе РЛС сигналов формируют две взаимно ортогональные сетки дугообразных зон дальностей, каждая из которых выделяется и детектируется на выходах гребенчатых фильтров приемных каналов РЛС; выходные сигналы которых подаются на ортогональные входы двумерной индикаторной матрицы, что позволяет формировать сигнал тревоги в полярной системе координат. 7 ил.
Способ охраны площадей территории с использованием принципов многопозиционной радиолокации, отличающийся тем, что обе РЛС располагаются на краю охраняемой территории, при этом оси лучей их антенн пересекаются под углом 90 град, а диаграммы направленности антенн в азимутальной плоскости имеют ширину 90 град и накрывают всю охраняемую территорию;
причем используются две активные дальномерные РЛС с ЛЧМ сигналами, разнесенные по одному краю охраняемой территории, причем каждая из них облучает всю охраняемую территорию плоским широким в азимутальных углах 60-150 град и узким в угломестной плоскости 5-10 град лучом;
причем к выходу приемника РЛС подключен гребенчатый фильтр с набором состыкованных по полосам фильтров с полосами каждого с желаемой разрешающей способностью по дальности, что позволяет в реальном времени одновременно получать информацию обо всех целях, находящихся в луче РЛС;
причем выходные сигналы гребенчатых фильтров каждой РЛС подаются на ортогональные входы двумерной индикаторной матрицы, которая в точке пересечения двух ортогональных дуг дальностей, соответствующих координатам нарушителя, формирует сигнал тревоги, в полярной системе координат;
причем обе РЛС с ЛЧМ модуляцией сигналов формируют две взаимно ортогональные сетки дугообразных зон дальностей, каждая из которых выделяется и детектируется на выходах гребенчатых фильтров приемных каналов РЛС;
причем выходные сигналы приемников РЛС по коаксиальным кабелям подаются на блок обработки и индикации, содержащий гребенчатые фильтры, преобразователь кодов, матричную индикаторную матрицу, извещатели тревоги, блоки питания.
| РАДИОЛОКАЦИОННЫЙ МОДУЛЬ И ИЗВЕЩАТЕЛИ ОХРАНЫ НА ЕГО ОСНОВЕ | 2009 |
|
RU2406154C1 |
| СПОСОБ ОТОБРАЖЕНИЯ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2015 |
|
RU2596852C1 |
| Способ радиолокационного обзора пространства | 2017 |
|
RU2676673C1 |
| Способ автоматизации работы исполнительных органов машин-орудий | 1947 |
|
SU71781A1 |
| US 4219802 A1, 26.08.1980 | |||
| Способ получения этилового эфира 9-фенилгидразоно-6-метил-4-оксо-6,7,8,9-тетрагидро-4н-пиридо/1,2-а/-пиримидин-3-карбоновой кислоты | 1980 |
|
SU978730A3 |

