Заявляемые технические решения относятся к области радиолокации и могут быть использованы для измерения угловых координат объектов.
Известен способ измерения угловых координат объекта в процессе обзора пространства радиолокационной станцией (РЛС), включающий излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение уровней принятых сигналов и угловых координат луча антенны РЛС, соответствующих принятым сигналам, формирование двумерных угловых пакетов принятых сигналов, вычисление угловых координат объекта. При этом угловая координата объекта 9 оценивается исходя из расчета максимума функции правдоподобия путем проверки выполнения условия (Самсоненко С.В. Цифровые методы оптимальной обработки радиолокационных сигналов. Военное издательство Министерства обороны СССР. - М., 1968, стр.254-258):

где n - количество положений луча в двумерном угловом пакете принятых сигналов по измеряемой угловой координате объекта θ;
Ki=KMQi;
Кi 2, КM 2- весовые коэффициенты, равные отношениям сигнал/шум (по мощности) для i-го импульса и для импульса, соответствующего расположению объекта на направлении максимума луча ДНА;
Qi=Q(θ-θi) - нормированная к своему максимуму диаграмма направленности антенны (ДНА) при положении луча, соответствующем i-му сигналу двумерного углового пакета принятых сигналов;
θi - угловая координата луча, соответствующего i-му сигналу двумерного углового пакета принятых сигналов, нормированная к ширине луча по уровню половинной мощности;
Кi ' - производная от Qi по угловой координате θ;
ρi - амплитуда i-ro сигнала двумерного углового пакета принятых сигналов, нормированная к среднеквадратическому значению шумов приемного тракта РЛС.
При определении угловой координаты объекта (условие (1) проверяется для различных возможных положений объекта по измеряемой угловой координате, т.е. многократно. Значение угловой координаты 9 в момент выполнения условия (1) принимается за угловую координату объекта.
Поясним понятие «двумерный угловой пакет принятых сигналов».
В процессе обзора пространства радиолокационной станцией сигналы, отраженные от объекта и принятые приемником, сравниваются с порогом обнаружения. В результате в каждом положении луча антенны (для каждой дискреты дальности) в плоскости угол места - азимут (ε-β) на выходе порогового устройства присутствует принятый сигнал, если он превышает уровень порога (сигнал обнаружен), сигнал на выходе порогового устройства отсутствует, если принятый сигнал ниже уровня порога (сигнал не обнаружен). Обнаруженные сигналы образуют двумерный угловой пакет, если они не прерываются одновременно по обеим угловым координатам положениями луча, в которых сигнал не обнаружен (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., «Советское радио», 1974, стр.30, рис.1.7). Двумерный угловой пакет принятых сигналов состоит из угломестных столбцов и азимутальных строк. На фиг.1 приведен пример двумерного углового пакета принятых сигналов.
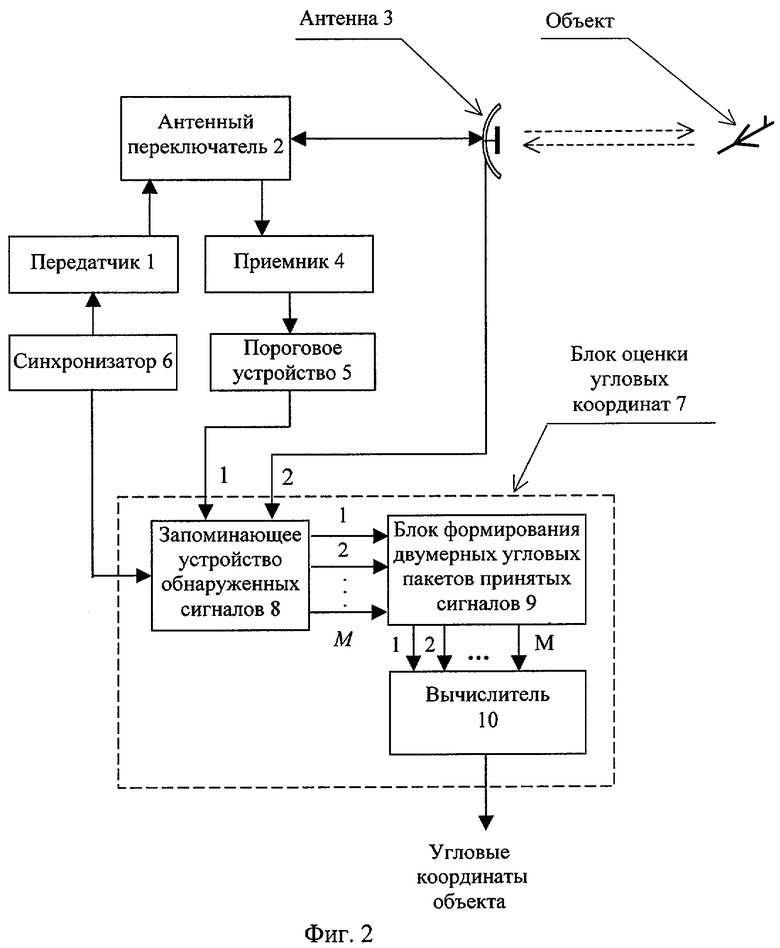
Известна РЛС (фиг.2), содержащая передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, блок оценки угловых координат 7, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен со входом порогового устройства 5, выход порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым и вторым входами блока оценки угловых координат 7, первый и второй выходы синхронизатора 6 соединены с синхровходами передатчика 1 и блока оценки угловых координат 7 соответственно, при этом блок оценки угловых координат 7 включает запоминающее устройство обнаруженных сигналов 8, блок формирования двумерных угловых пакетов принятых сигналов 9 и вычислитель 10, причем первый и второй входы запоминающего устройства обнаруженных сигналов 8 являются первым и вторым входами блока оценки угловых координат 7 соответственно, М выходов запоминающего устройства обнаруженных сигналов 8 соединены с М входами блока формирования двумерных угловых пакетов принятых сигналов 9, М выходов которого соединены с М входами вычислителя 10, выход вычислителя 10 является выходом блока оценки угловых координат 7 (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана. М., «Сов. радио», 1970, стр.221).
Особенностью известных технических решений является значительная длительность процедуры определения угловых координат объекта. Такая длительность обусловлена большим количеством переборов возможных угловых положений объекта и проверкой в каждом положении условия (1). С учетом ограничения временных ресурсов в мобильных обзорных РЛС указанная длительность измерения является серьезным недостатком, следствием которого в РЛС данного типа является низкая точность определения угловых координат объекта.
Наиболее близкий способ измерения угловых координат объекта (патент РФ №2235342) включает излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение уровней принятых сигналов и угловых координат луча антенны РЛС, соответствующих принятым сигналам, формирование двумерных угловых пакетов принятых сигналов, определение мощности сигнала, соответствующего расположению объекта на направлении максимума луча, вычисление угловых координат объекта.
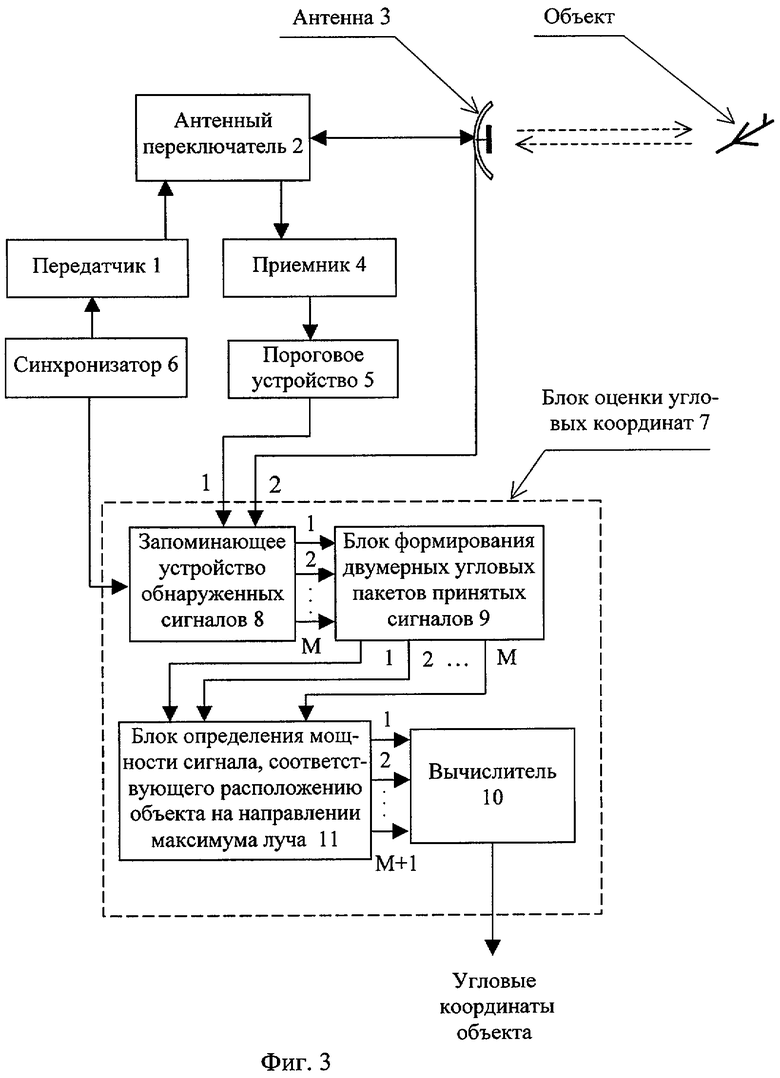
Наиболее близкая к заявляемой РЛС, реализующая известный способ (патент РФ №2235342), содержит (фиг.3) передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, блок оценки угловых координат 7, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом порогового устройства 5, выход порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым и вторым входами блока оценки угловых координат 7, первый и второй выходы синхронизатора 6 соединены соответственно с синхровходами передатчика 1 и блока оценки угловых координат 7, при этом блок оценки угловых координат 7 включает запоминающее устройство обнаруженных сигналов 8, блок формирования двумерных угловых пакетов принятых сигналов 9 и вычислитель 10, причем первый и второй входы запоминающего устройства обнаруженных сигналов 8 являются первым и вторым входами блока оценки угловых координат 7 соответственно. М выходов запоминающего устройства обнаруженных сигналов 8 соединены с М входами блока формирования двумерных угловых пакетов принятых сигналов 9, выходы которого соединены со входами блока определения мощности сигнала, соответствующего расположению объекта на направлении максимума луча 11. Выходы этого блока соединены со входами вычислителя 10. Выход вычислителя 10 является выходом блока оценки угловых координат 7.
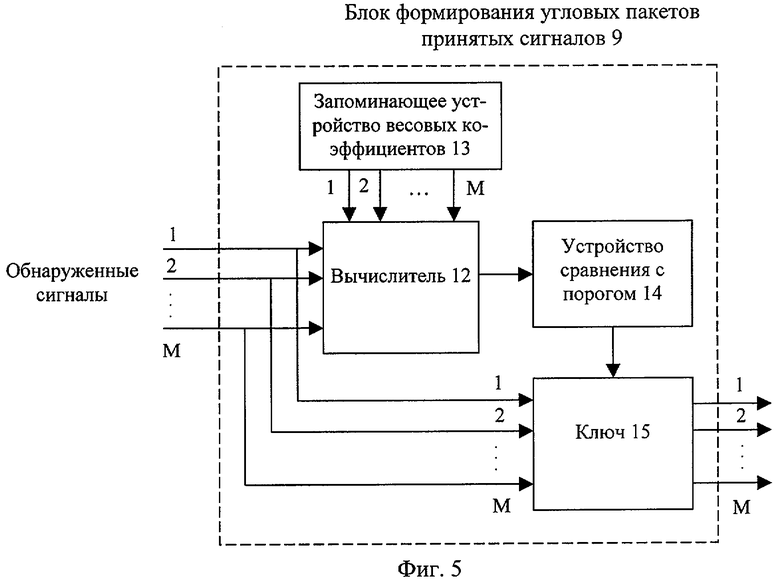
Работа наиболее близкой к заявляемой РЛС при измерении угловых координат объекта происходит следующим образом. В передатчике 1 по командам синхронизатора 5 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 3 излучаются в пространство. Отраженные от объекта сигналы принимаются антенной 3 и поступают в приемник 4. С выхода приемника 4 сигналы поступают на вход порогового устройства 5, где сравниваются с порогом, который задается исходя из допустимой вероятности ложного обнаружения сигнала. Сигналы, уровень которых превышает пороговый, проходят на выход порогового устройства 5. Обнаруженные сигналы с выхода порогового устройства 5 и сигналы, пропорциональные угловым координатам луча антенны 3, поступают в блок оценки угловых координат 7. Значения амплитуд сигналов с соответствующими угловыми координатами луча по мере движения луча антенны РЛС при обзоре пространства записываются в запоминающее устройство обнаруженных сигналов 8 и хранятся там. По командам с синхронизатора 6 из запоминающего устройства обнаруженных сигналов 8 извлекаются записанные в них данные и подаются в блок формирования двумерных угловых пакетов принятых сигналов 9, где происходит объединение принятых сигналов в двумерные угловые пакеты (фиг.5). Уровни принятых сигналов и соответствующие принятым сигналам угловые координаты луча поступают на первые М входов вычислителя 12. На вторые М входов вычислителя 12 поступают весовые коэффициенты из запоминающего устройства весовых коэффициентов 13. В вычислителе 12 производятся перемножения значений амплитуд сигналов и заранее записанных в запоминающее устройство весовых коэффициентов 13 весовых коэффициентов и суммирование полученных произведений. Сигнал, пропорциональный полученной сумме, подается в устройство сравнения с порогом 14, где сравнивается с заранее установленным порогом. Уровень порога задается исходя из допустимой вероятности формирования ложного пакета. При превышении порога на выходе устройства сравнения с порогом 14 выдается импульс, означающий, что сформирован угловой пакет принятых сигналов. Данный импульс разрешает прохождение сигналов пакета и координат луча, соответствующих принятым сигналам, через ключ 15 на выход блока формирования двумерных угловых пакетов принятых сигналов 9 и далее - на входы блока определения мощности сигнала, соответствующего расположению объекта на направлении максимума луча 11. В данном блоке определяется мощность, которую имел бы сигнал, отраженный от объекта, если бы объект находился в максимуме ДНА. В частном случае в качестве определяемой в данном блоке амплитуды может быть взята максимальная амплитуда сигнала в пакете принятых сигналов. Сигнал, пропорциональный определенной таким образом амплитуде, и данные о всех других сигналах углового пакета (всего не более М+1 сигналов) поступают в вычислитель 10, в котором вычисляются угловые координаты объекта.
Недостатком наиболее близких способа и реализующего его устройства является то, что при определении максимального значения мощности сигнала, соответствующего расположению объекта на направлении максимума луча антенны РЛС по одной координате, положение объекта по другой координате не учитывается. В результате точность определения угловых координат объекта в ряде случаев оказывается низкой.
Заявляемое изобретение направлено на устранение указанного недостатка.
Решаемой задачей (техническим результатом), таким образом, является повышение точности измерения угловых координат объекта.
Указанный технический результат достигается тем, что в способе измерения угловых координат объекта в процессе обзора пространства радиолокационной станцией, включающем излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение уровней принятых сигналов и угловых координат луча антенны РЛС, соответствующих принятым сигналам, формирование двумерных угловых пакетов принятых сигналов, вычисление угловых координат объекта, согласно изобретению, в каждом угломестном столбце двумерного углового пакета принятых сигналов, образованном положениями луча с одинаковым значением азимута βs и отличающимися значениями угла места εi S, определяют угол места луча εm0 S, в котором амплитуда принятого сигнала в пределах этого угломестного столбца максимальна, и углы места двух ближайших к нему положений луча εm1 S и εm2 S с наибольшими амплитудами сигналов среди других положений луча в пределах этого угломестного столбца и запоминают эти координаты луча и соответствующие им амплитуды ρm0 S, ρm1 S, ρm2 S (ρm0 S≥ρm1 S≥ρm2 S), при этом угломестный столбец, содержащий обнаруженный сигнал только в одном положении луча, не учитывают, затем в каждой азимутальной строке двумерного углового пакета принятых сигналов, образованной положениями луча с одинаковыми значениями угла места εT и отличающимися значениями азимута βj Т, определяют азимут луча βm0 Т, в котором амплитуда принятого сигнала максимальна в пределах этой азимутальной стоки, и азимуты двух ближайших к нему положений луча βm1 T и βm2 Т с наибольшими амплитудами сигналов среди других положений луча в пределах этой азимутальной строки и запоминают эти координаты луча и соответствующие им амплитуды ρm0 T, ρm1 T, ρm2 T (ρm0 T≥ρm1 T≥ρm2 T), при этом азимутальную строку, содержащую обнаруженный сигнал только в одном положении луча, не учитывают, затем из всех положений луча двумерного углового пакета принятых сигналов определяют координаты положения луча по углу места εm0 и по азимуту βм0, в котором амплитуда сигнала максимальна, а также координаты двух ближайших к нему положений луча с наибольшими амплитудами сигналов εM1 М0 и βМ1 M0: одного - в угломестном столбце, другого - в азимутальной строке соответственно, в которых расположен луч с координатами εМ0, βМ0, и запоминают эти координаты луча и соответствующие им амплитуды ρM0, ρM1 M0, ρM0 M1 (ρM0≥ρM1 M0, ρM0≥ρM0 M1), после чего вычисляют угловые координаты объекта по углу места (и азимуту (в соответствии с формулами:
где S, Т - порядковый номер угломестного столбца (по азимуту) и азимутальной строки (по углу места) соответственно;
L, N - количество угломестных столбцов и азимутальных строк соответственно в двумерном угловом пакете принятых сигналов;

nε S - количество положений луча в угломестном столбце с азимутом βs;






nβТ - количество положений луча в азимутальной строке с углом места εT;





ρi S, PjT - нормированные к среднеквадратическому значению шумов амплитуды сигналов в положениях луча в S-ом угломестном столбце и в Т-ой азимутальной строке пакета соответственно, i=1,..., nεS, j=1,...n βT;
α2 ε, α2 β - коэффициенты, определяющие крутизну ДНА по углу места и азимуту ее ответственно, при нормировке координат к ширине луча по уровню половинной мощности по соответствующей координате α2 ε=α2 β=2.78.
Технический результат достигается также тем, что в радиолокационную станцию, содержащую передатчик, антенный переключатель, антенну, приемник, пороговое устройство, синхронизатор, блок оценки угловых координат, при этом выход передатчика соединен со входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен со входом порогового устройства, выход порогового устройства и координатный выход антенны соединены соответственно с первым и вторым входами блока оценки угловых координат, первый и второй выходы синхронизатора соединены соответственно с синхровходами передатчика и блока оценки угловых координат, при этом блок оценки угловых координат включает запоминающее устройство обнаруженных сигналов, блок формирования двумерных угловых пакетов принятых сигналов и вычислитель, причем первый и второй входы запоминающего устройства обнаруженных сигналов являются первым и вторым входами блока оценки угловых координат соответственно, М выходов запоминающего устройства обнаруженных сигналов соединены с М входами блока формирования двумерных угловых пакетов принятых сигналов, где М - максимально возможное количество положений луча в двумерном угловом пакете принятых сигналов, выход вычислителя является выходом блока оценки угловых координат, согласно изобретению, введен блок анализа двумерного углового пакета принятых сигналов, М входов которого соединены с М выходами блока формирования двумерных угловых пакетов принятых сигналов, a M+k выходов соединены с M+k входами вычислителя, где k - максимально возможное количество параметров, оцениваемых в двумерном угловом пакете принятых сигналов.
Суть заявляемых технических решений состоит в следующем.
Известно, что высокая точность измерения угловых координат объекта в РЛС обеспечивается оптимальной весовой обработкой принятых сигналов двумерного углового пакета. При этом измерение является наилучшим, если используется большое количество сигналов в пакете, т.е. пакет имеет достаточно большие размеры по угловым координатам. Однако большая величина углового пакета может быть получена только при малом шаге смещения луча антенны РЛС при обзоре, что, например, в мобильных обзорных РЛС, как правило, не обеспечивается.
Особенностью заявляемого способа измерения является достаточно высокая точность измерения угловых координат при относительно небольшом двумерном угловом пакете принятых сигналов. Такая точность достигается за счет наиболее полного использования информации об объекте в двумерном угловом пакете принятых сигналов. Так, в наиболее близком способе при определении мощности сигнала, соответствующего расположению объекта на направлении максимума луча, ошибка по одной из координат приводит к ошибкам измерения по обеим координатам. В заявляемом же способе при оценке угловых координат производится «взвешивание» всех принятых в угловом пакете сигналов и пар сигналов весовыми коэффициентами, определяемыми исходя из уровня каждого сигнала и взаимного расположения сигналов в пакете. Поэтому ошибка измерения обеих угловых координат всегда меньше.
Относительно небольшой объем вычислений, производимый в соответствии с формулами (2), позволяет применять заявляемый способ и в РЛС с ограниченными временными ресурсами, в частности, в мобильных обзорных РЛС.
Таким образом, достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - пример двумерного углового пакета принятых сигналов; черной жирной линией обозначены границы пакета; затемнены положения луча, в которых произошло обнаружение объекта; черной штриховкой показано положение луча с максимальной амплитудой принятого сигнала в двумерном угловом пакете.
Фиг.2 - блок-схема известной РЛС.
Фиг.3 - блок-схема наиболее близкой РЛС.
Фиг.4 - блок-схема заявляемой РЛС.
Фиг.5 - блок формирования двумерных угловых пакетов принятых сигналов 9.
Заявляемый способ измерения угловых координат объекта реализуется с помощью радиолокационной станции, которая содержит (фиг.4) передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, блок оценки угловых координат 7, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом порогового устройства 5, выход порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым и вторым входами блока оценки угловых координат 7, первый и второй выходы синхронизатора 6 соединены соответственно с синхровходами передатчика 1 и блока оценки угловых координат 7, при этом блок оценки угловых координат 7 включает запоминающее устройство обнаруженных сигналов 8, блок формирования двумерных угловых пакетов принятых сигналов 9, блок анализа двумерного углового пакета принятых сигналов 16 и вычислитель 10, причем первый и второй входы запоминающего устройства обнаруженных сигналов 8 являются первым и вторым входами блока оценки угловых координат 7 соответственно, М выходов запоминающего устройства обнаруженных сигналов 8 соединены с М входами блока формирования двумерных угловых пакетов принятых сигналов 9, М выходов которого соединены с М входами блока анализа двумерного углового пакета принятых сигналов 16, a M+k его выходов соединены с M+k входами вычислителя 10. Выход вычислителя 10 является выходом блока оценки угловых координат 7.
Количество выходов запоминающего устройства обнаруженных сигналов 8, входов и выходов блока формирования двумерных угловых пакетов принятых сигналов 9, входов блока анализа двумерного углового пакета принятых сигналов 16, входов вычислителя 10, первых и вторых входов вычислителя 12, выходов запоминающего устройства весовых коэффициентов 13, входов и выходов ключа 15 (значение М) определяется наибольшей возможной величиной двумерного углового пакета принятых сигналов по обеим угловым координатам.
Величина М для конкретных параметров РЛС (наименьшего шага перемещения луча при обзоре пространства, мощности зондирующего сигнала, типа обнаруживаемых объектов) может быть определена заранее. Так, например, известно, что в мобильных обзорных РЛС средней дальности для шага перемещения луча антенны порядка 0.5 ширины луча антенны при обнаружении крупных летательных аппаратов формируется угловой пакет сигналов, состоящий по одной угловой координате не более чем из 5 положений луча. Таким образом, в РЛС указанного типа максимально возможная величина углового пакета М равна 25 положениям луча. На фиг.1 приведен пример двумерного углового пакета принятых сигналов величиной 15 положений луча.
Количество параметров, оцениваемых в двумерном угловом пакете принятых сигналов блоком анализа двумерного углового пакета принятых сигналов 16, т.е. величина k, складывается из следующих положений луча в пакете: трех ближайших друг к другу положений луча с наибольшими амплитудами сигналов из каждого угломестного столбца пакета; трех ближайших друг к другу положений луча с наибольшими амплитудами сигналов из каждой азимутальной строки пакета; одного положения луча с наибольшей амплитудой сигнала пакета и из одного по каждой координате ближайшего к нему положения луча с наибольшей амплитудой сигнала.
Очевидно, что величина k для различных размеров углового пакета принятых сигналов будет отличаться, но в любом случае она не будет превышать максимально возможное значение М. Таким образом, количество выходов блока анализа двумерного углового пакета принятых сигналов 16, равное M+k, не будет превышать величину 2М.
Радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
Передатчик 1 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с.278).
Антенный переключатель 2 - выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с.146-147).
Антенна 3 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М.Сколника, т.2. - М.: «Сов. радио», 1977, с.132-138).
Приемник 4 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с.343-344).
Цифровые элементы: запоминающее устройство обнаруженных сигналов 8, вычислитель 10, вычислитель 12, запоминающее устройство весовых коэффициентов 13, устройство сравнения с порогом 14, ключ 15 - выполнены на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина. - М.: «Радио и связь», 1984).
Блок формирования двумерных угловых пакетов принятых сигналов 9 (фиг.4) построен на основе известной структурной схемы (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., «Советское радио», 1974, стр.38-40, рис.1.11).
Вычислитель 10 реализует вычисления в соответствии с формулой (3).
Вычислитель 12 реализует вычисления в соответствии с формулой:  где ηij - весовые коэффициенты, определенные заранее (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., «Советское радио», 1974, стр.39, формула (1, 3, 6а)).
где ηij - весовые коэффициенты, определенные заранее (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., «Советское радио», 1974, стр.39, формула (1, 3, 6а)).
Блок анализа двумерного углового пакета принятых сигналов 16 - вычислитель, реализующий выбор и запоминание следующих параметров двумерного углового пакета принятых сигналов: в каждом угломестном столбце двумерного углового пакета принятых сигналов, образованном положениями луча с одинаковым значением азимута βS и отличающимися значениями угла места εiS, определяются угол места луча εm0S, в котором амплитуда принятого сигнала в пределах этого угломестного столбца максимальна, и углы места двух ближайших к нему положений луча εm1 S и εm2 S с наибольшими амплитудами сигналов среди других положений луча в пределах этого угломестного столбца и запоминаются эти координаты луча и соответствующие им амплитуды ρm0 S, ρm1 S, ρm2 S (ρm0 S≥ρm1 S≥ρm2 S), при этом угломестный столбец, содержащий единственное положение луча с обнаруженным сигналом, не учитывается, затем в каждой азимутальной строке двумерного углового пакета принятых сигналов, образованной положениями луча с одинаковыми значениями угла места εT и отличающимися значениями азимута βj Т, определяются азимут луча βm0 Т, в котором амплитуда принятого сигнала максимальна в пределах этой азимутальной стоки, и азимуты двух ближайших к нему положений луча βm1 Т и βm2Т с наибольшими амплитудами сигналов среди других положений луча в пределах этой азимутальной строки и запоминаются эти координаты луча и соответствующие им амплитуды ρm0 Т, ρm1 Т, ρm2 Т (ρm0 Т≥ρm1 Т≥ρm2 Т), при этом взимутальная строка, содержащая единственное положение луча с обнаруженным сигналом, не учитывается, затем из всех положений луча двумерного углового пакета принятых сигналов определяются координаты положения луча по углу места εМ0 и по азимуту βМ0, в котором амплитуда сигнала максимальна, а также координаты двух ближайших к нему положений луча с наибольшими амплитудами сигналов εM1 М0 и βM1 М0: одного - в угломестном столбце, другого - в азимутальной строке соответственно, в которых расположен луч с координатами εM0; βМ0, и запоминаются эти координаты луча и соответствующие им амплитуды ρM0, ρM1 M0, ρM0 M1 (ρM0≥ρM1 M0, ρM0≥ρM0 M1).
Работа заявляемой РЛС при измерении угловых координат объекта происходит следующим образом (фиг.4). В передатчике 1 по командам синхронизатора 5 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 3 излучаются в пространство. Отраженные от объекта сигналы принимаются антенной 3, поступают в приемник 4. С выхода приемника 4 сигналы поступают на вход порогового устройства 5, где сравниваются с порогом, который задается исходя из допустимой вероятности ложного обнаружения сигнала. Сигналы, уровень которых превышает пороговый, проходят на выход порогового устройства 5. Обнаруженные сигналы с выхода порогового устройства 5 и сигналы, пропорциональные угловым координатам луча антенны 3, поступают в блок оценки угловых координат 7. Значения амплитуд сигналов с соответствующими угловыми координатами луча по мере движения луча антенны при обзоре пространства записываются в запоминающее устройство обнаруженных сигналов 8 и хранятся там. По командам с синхронизатора 6 из запоминающего устройства обнаруженных сигналов 8 извлекаются записанные в них данные и подаются в блок формирования двумерных угловых пакетов принятых сигналов 9, где происходит объединение принятых сигналов в пакет. Уровни принятых сигналов и соответствующие принятым сигналам угловые координаты луча поступают на первые М входов вычислителя 12, на вторые М входов вычислителя 12 поступают весовые коэффициенты из запоминающего устройства весовых коэффициентов 13. В вычислителе 12 производятся перемножения значений амплитуд сигналов и соответствующих, заранее записанных в запоминающее устройство весовых коэффициентов 13, весовых коэффициентов и суммирование полученных произведений. Сигнал, пропорциональный полученной сумме, подается в устройство сравнения с порогом 14, где сравнивается с заранее установленным порогом. Уровень порога задается исходя из допустимой вероятности формирования ложного углового пакета. При превышении порога на выходе устройства сравнения с порогом 14 выдается импульс, означающий, что угловой пакет сигналов сформирован. Данный импульс разрешает прохождение принятых сигналов и координат луча, соответствующих принятым сигналам, через ключ 15 на выход блока формирования двумерных угловых пакетов принятых сигналов 9 и далее - на входы блока анализа двумерного углового пакета принятых сигналов 16. В данном блоке определяется k следующих параметров двумерного углового пакета принятых сигналов: в каждом угломестном столбце двумерного углового пакета принятых сигналов, образованном положениями луча с одинаковым значением азимута βS и отличающимися значениями угла места εi S, определяются угол места луча εm0S, в котором амплитуда принятого сигнала в пределах этого угломестного столбца максимальна, и углы места двух ближайших к нему положений луча εm1 S и εm2 S с наибольшими амплитудами сигналов среди других положений луча в пределах этого угломестного столбца и запоминаются эти координаты луча и соответствующие им амплитуды ρm0 S, ρm1 S, ρm2 S (ρm0 S≥ρm1 S≥ρm2 S), при этом угломестный столбец, содержащий единственное положение луча с обнаруженным сигналом, не учитывается, затем в каждой азимутальной строке двумерного углового пакета принятых сигналов, образованной положениями луча с одинаковыми значениями угла места εT и отличающимися значениями азимута βj T, определяются азимут луча βm0 T; в котором амплитуда принятого сигнала максимальна в пределах этой азимутальной стоки, и азимуты двух ближайших к нему положений луча βm1 T и βm2 T с наибольшими амплитудами сигналов среди других положений луча в пределах этой азимутальной строки и запоминаются эти координаты луча и соответствующие им амплитуды ρm0 Т, ρm1 Т, ρm2 Т (ρm0 T≥ρm1 T≥ρm2 T), при этом азимутальная строка, содержащая единственное положение луча с обнаруженным сигналом, не учитывается, затем из всех положений луча двумерного углового пакета принятых сигналов определяются координаты положения луча по углу места εM0 и по азимуту βM0, в котором амплитуда сигнала максимальна, а также координаты двух ближайших к нему положений луча с наибольшими амплитудами сигналов εM1M0 и βM1M0: одного - в угломестном столбце, другого - в азимутальной строке соответственно, в которых расположен луч с координатами εM0, βM0, и запоминаются эти координаты луча и соответствующие им амплитуды ρM0, ρM1 M0, ρM0 M1 (ρM0≥ρM1M0, ρM0≥ρM0M1). Указанные параметры пакета (k штук) вместе с принятыми в пакете сигналами и координатами луча, соответствующими этим сигналам (М штук), поступают в вычислитель 10, где в соответствии с формулой (2) вычисляются угловые координаты объекта.
Таким образом, заявленные технические решения обеспечивают достижение технического результата - повышение точности измерения угловых координат объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА | 2006 |
|
RU2325669C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2009 |
|
RU2408029C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2007 |
|
RU2362183C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2008 |
|
RU2363015C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309427C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358281C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛИ | 2015 |
|
RU2581898C1 |
| СПОСОБ ЗАЩИТЫ ОТ ПАССИВНЫХ ПОМЕХ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358285C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА В ПРОЦЕССЕ ЗАХВАТА И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ В СТРОБАХ | 2006 |
|
RU2306580C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ | 2008 |
|
RU2366971C1 |

Предлагаемые технические решения относятся к области радиолокации и могут быть использованы для измерения угловых координат объектов. Решаемой задачей (техническим результатом) является повышение точности измерения угловых координат объекта. Технический результат достигается тем, что в технических решениях, включающих излучение зондирующих сигналов, прием и обнаружение отраженных от объекта сигналов, измерение уровней принятых сигналов и угловых координат луча, соответствующих принятым сигналам, формирование двумерных угловых пакетов принятых сигналов, осуществляют анализ двумерного углового пакета принятых сигналов, на основании которого вычисляют угловые координаты объекта. 2 н.п. ф-лы, 5 ил.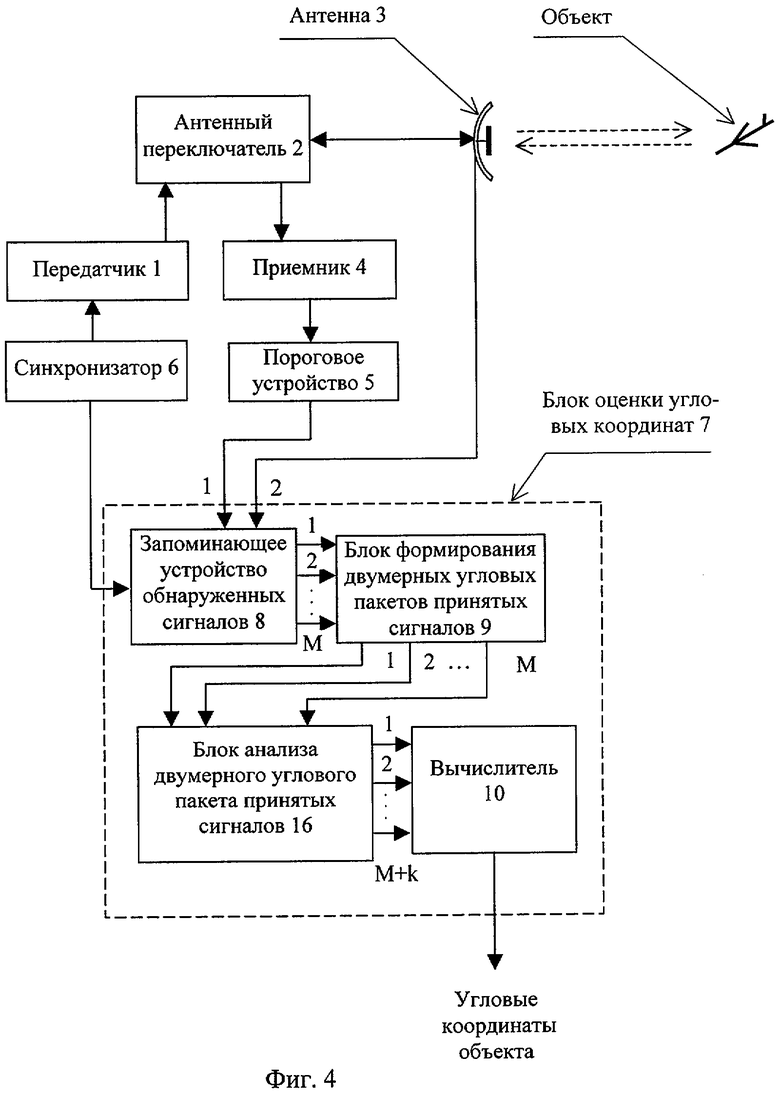
где S, Т - порядковый номер угломестного столбца (по азимуту) и азимутальной строки (по углу места) соответственно;
L, N - количество угломестных столбцов и азимутальных строк соответственно в двумерном угловом пакете принятых сигналов;

nε S - количество положений луча в угломестном столбце с азимутом βS;






nβ T - количество положений луча в азимутальной строке с углом места εT;





ρi S, ρjT - нормированные к среднеквадратическому значению шумов амплитуды сигналов в положениях луча в S-м угломестном столбце и в Т-й азимутальной строке пакета соответственно, i=1,...,nε S, j=1,...,nβ T;
α2 ε, α2 β - коэффициенты, определяющие крутизну ДНА по углу места и азимуту соответственно, при нормировке координат к ширине луча по уровню половинной мощности по соответствующей координате α2 ε=α2 β=2,78.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2235342C2 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА | 1995 |
|
RU2089924C1 |
| RU 94017060 А1, 27.07.1996 | |||
| Роторный подборщик плодов бахчевых культур с дисковым ножом | 2017 |
|
RU2643725C1 |
| US 5786787 А, 28.07.1998. | |||

