Изобретение относится к области измерительной техники и может быть использовано в виде платформенного, подвесного и выполненного из независимых измерительных блоков устройств для осуществления способа измерения механических силовых воздействий между материальными объектами.
Известен способ измерения механических силовых воздействий между материальными объектами, включающий в себя приведение в механический контакт взаимодействующих объектов и измерительных блоков и измерение веса, воздействующего на измерительный блок объекта [1]
Известен способ измерения механических силовых воздействий между материальными объектами, включающий в себя приведение в механический контакт взаимодействующих объектов и измерительных блоков, измерение электромеханических параметров, определяемых величиной силового воздействия, обработку этих параметров и получение на основе этой обработки величин, характеризующих измеряемое воздействие [2] прототип.
Известны весы, содержащие установленную на регулируемых опорах платформу с размещенными на ней средствами измерения веса установленных на платформе объектов [1]
Известны напольные весы, содержащие установленную на регулируемых опорах платформу с размещенными на ней средствами измерения веса установленных на платформе объектов [1]
Известны напольные весы, содержащие установленную на регулируемых опорах нижнюю платформу с размещенными на ней блоками преобразования силовых воздействий, и верхнюю платформу, установленную на верхних частях блоков [2] -прототип.
Известно устройство для осуществления способа измерения механических силовых воздействий между материальными объектами, содержащее корпус, соединенный через опорные элементы с измерительными блоками, установленными на основаниях [2] прототип.
Известно устройство для осуществления способа измерения механических силовых воздействий между материальными объектами, содержащее измерительную систему, расположенную на основании и соединенную через силопередающий узел с опорным узлом [2] прототип.
Недостатком известных способов и устройств для их осуществления является сравнительно большое значение абсолютной погрешности измерения максимальных значений механических силовых воздействий из-за неоптимальных условий их реализации.
Достигаемым техническим результатом в соответствии с заявленными объектами является снижение абсолютной погрешности измерения максимальных значений механических силовых воздействий.
Совокупность существенных признаков, достаточную для достижения указанного технического результата, обеспечивают в заявленном способе измерения механических силовых воздействий между материальными объектами, включающем в себя приведение в механический контакт взаимодействующих объектов и измерительных блоков, измерение электромеханических параметров, определяемых величиной силового воздействия, передачу информации между измерительными блоками и микропроцессорным блоком, обработку электромеханических параметров и получение на основе этой обработки величин, характеризующих измеряемое воздействие, тем, что располагают n1 измерительных блоков между произвольно расположенными в пространстве материальными объектами, где n1 выбирают в пределах: 1 ≤n1 ≤ 103 по линиям их силового взаимодействия таким образом, что угол α между векторами силового воздействия материальных объектов и осями оптимального измерительного воздействия на блок выбирают в пределах 0o ≤ a ≤ 89o. Часть n1 датчиков, где n2 выбирают из условия:
устанавливают для измерения нормальных, т.е. направленных вдоль линии действия измеряемой силы, составляющих силовых воздействий, а часть n3, где n3 выбрано в пределах:
для измерения тангенциальных, т.е. направленных перпендикулярно линии действия измеряемой силы, составляющих силовых воздействий P
Часть n4 измерительных блоков, выбираемая в пределах  и/или n5 дополнительных измерительных блоков, выбираемых из условия:
и/или n5 дополнительных измерительных блоков, выбираемых из условия:  , используют в качестве эталонных для калибровки нормальных и тангенциальных составляющих измеряемых силовых воздействий. В качестве измеряемого электромеханического параметра, связанного с силовым механическим воздействием, выбирают преимущественно изменение ΔCi емкости конденсатора Cio, выполненного в виде группы мембран, образующих датчик каждого измерительного блока, в зависимости от величины силового воздействия Pi. Преобразуют параметр
, используют в качестве эталонных для калибровки нормальных и тангенциальных составляющих измеряемых силовых воздействий. В качестве измеряемого электромеханического параметра, связанного с силовым механическим воздействием, выбирают преимущественно изменение ΔCi емкости конденсатора Cio, выполненного в виде группы мембран, образующих датчик каждого измерительного блока, в зависимости от величины силового воздействия Pi. Преобразуют параметр  в соответствующий ему электрический параметр частоту fi, связанную с ним соотношением:
в соответствующий ему электрический параметр частоту fi, связанную с ним соотношением:
Используя электрическую кабельную линию, либо канал радиосвязи, либо волоконнооптическую линию, либо инфракрасную, либо ультрафиолетовую технику, передают полученную информацию об электромеханических параметрах от измерительных блоков в микропроцессорный блок управления и обработки информации.
Преобразуют совокупность частот fi с использованием зависимости fi Kifiэт, а искомое значение Pi определяют на основании зависимости:
где 10-3 ≤Ai ≤103,  , -10 ≤ a3ij≤10, выбираемые в зависимости от материала мембран, их конструктивных параметров и диапазона рабочих нагрузок, часто в виде:
, -10 ≤ a3ij≤10, выбираемые в зависимости от материала мембран, их конструктивных параметров и диапазона рабочих нагрузок, часто в виде:
Pi= Ai+Bi1fi+B12f
Совокупность существенных признаков, достаточная для достижения указанного технического результата, обеспечена также с помощью платформенного устройства для осуществления способа, содержащего установленную на регулируемых опорах платформу-основание с размещенными на ней блоками измерения силовых воздействий, и силовоспринимающую платформу, установленную на верхних частях этих блоков, тем, что отношение длины l1 регулируемой части опор к расстоянию l2 между консольно удаленными точками грузоприемной платформы выбрано из условия: 0,01 ≤ l1/l2≤ 0,5. Минимальное расстояние l3 между точками нагружения датчиков и максимальная величина l4 этого расстояния взаимосвязаны соотношением: 0,1 ≤ l3/l4 ≤ 1, отношение величины l4 к величине l2 выбрано из условия: 0,5 ≤ l4/l2 ≤1. Датчики блоков измерения выполнены в виде двух силовоспринимающих мембран, переменная толщина которых d по поверхности каждой мембраны выбрана в зависимости от ее максимального поперечного размера l5 из условия: 10-6 ≤ d/l5 ≤102. При этом отношение минимального расстояния l6 между мембранами выбрано по отношению к максимальному поперечному размеру l5 мембраны из условия: 10-4≤ l6/l5 ≤ 0,8. Минимальные S1i и максимальные S2i значения площадей обкладок каждого измерительного конденсатора, которые (все либо часть из них) жестко скреплены с силовоспринимающими мембранами, выбраны из условия: 0,1 ≤ S1i/S2i≤ 1.
Совокупность существенных признаков, достаточная для достижения указанного технического результата, обеспечена также с помощью устройства для осуществления способа измерения механических силовых воздействий между материальными объектами, содержащего корпус, соединенный через опорные элементы и силопередающие узлы с измерительными блоками, установленными на основаниях, тем, что корпус выполнен в виде емкости произвольной формы с минимальным размером l7, взаимосвязанным с его максимальным размером l8 соотношением: 1 ≤ (l7 + l8)/l8 ≤ 2. Емкость выполнена с n6 загрузочными и n7 разгрузочными отверстиями, причем n6 и n7 выбраны из условий: 1 ≤ n6 ≤ 102, 1 ≤ n7 ≤ 102. При этом суммарные площади S3 загрузочных и S4 разгрузочных отверстий выбраны по отношению к площади S5 внутренней поверхности корпуса соответственно в пределах: 10-4 ≤ S3/S5 ≤1; 10-4 ≤ S4/S5≤ 1, и все отверстия выполнены с крышками и/или без них.
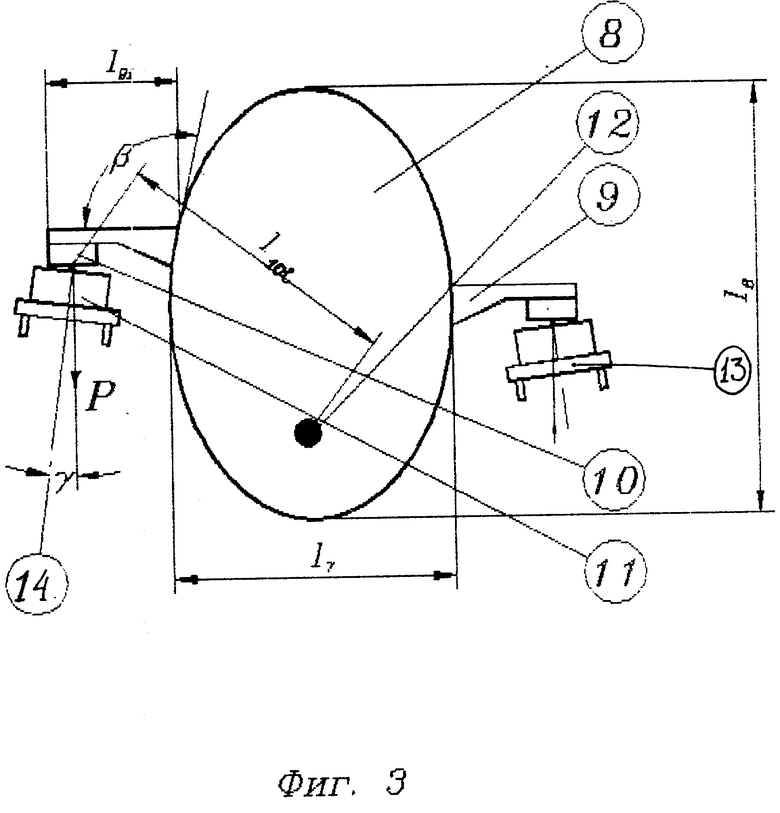
На наружной поверхности корпуса установлены n8 опорных элементов произвольной формы, причем 1≤ n ≤ 102. Опорные элементы через силопередающие узлы соединены с измерительными блоками таким образом, что точки приложения результирующего силового воздействия на измерительные блоки расположены относительно центра массы незагруженного корпуса на расстояниях l10i, где I≤ i ≤ n3, выбранных по отношению к l8 из условия: 10-3 ≤ l10i/l8 ≤ 6. Основания выполнены регулируемыми для обеспечения углов γi, где I≤ i ≤ n8 между результирующей внешнего силового воздействия и осями оптимального силового воздействия каждого из измерительных блоков, выбираемых из условия: 0°≤ γi≤ 30°.
Совокупность существенных признаков, достаточная для достижения указанного технического результата, обеспечена также с помощью устройства для осуществления указанного способа, содержащего корпус, соединенный через опорные элементы и силопередающие узлы с измерительными блоками, опорные элементы выполнены в виде кронштейнов, установленных под углом β, выбранным из условия 0°≤ β ≤ 170° относительно внешней поверхности емкости, максимальные размеры l9i кронштейнов, где 1≤ i ≤ n8, относительно максимального размера l8 емкости выбраны из условия: 10-5 ≤ l9i/l8 ≤5.
Совокупность существенных признаков, достаточная для достижения указанного технического результата, обеспечена также с помощью устройства для осуществления заявленного способа, содержащего корпус, соединенный через силопередающие узлы и опорные элементы с измерительными блоками, силопередающие узлы выполнены в виде шарниров и/или подпятников.
Совокупность существенных признаков, достаточная для достижения указанного технического результата, обеспечена также с помощью подвесного устройства для осуществления способа измерения механических силовых воздействий, содержащего измерительные блоки, расположенные на основании и соединенные через силопередающий узел с опорным узлом, основание и опорный узел выполнены каждый в виде консоли, консоль опорного узла выполнена по крайней мере из двух узлов узла приложения внешнего воздействия и узла передачи силового воздействия, силопередающий узел установлен на узле передачи силового воздействия и соединен с измерительными блоками. При этом расстояние l14 между точками приложения силовых воздействий к каждому измерительному блоку по отношению к расстоянию l15 между точками приложения результирующих силовых векторов внешних силовых воздействий к консолям основания и опорного узла выбрано из условия: 10-2 ≤ l14/l15 ≤ 1, а угол δ между осью оптимального силового воздействия на каждый измерительный блок и направлением результирующего вектора внешнего воздействия выбран в пределах: 0°≤ δ ≤ 10°. Расстояние l16 между точкой приложения результирующего вектора внешнего силового воздействия к основанию и точками передачи силового воздействия от основания к измерительным блокам и расстояние l17 между точкой приложения результирующего вектора внешнего силового воздействия к опорному узлу и точками передачи силового воздействия опорным узлом к измерительным блокам системы выбраны из условия: 0,1 ≤ l16/l17 ≤ 10.
Совокупность существенных признаков, достаточная для достижения указанного технического результата, обеспечена также с помощью подвесного устройства, в котором консоль основания выполнена в виде скобы, отношение минимального l11 к максимальному l12 ее размеров выбрано из условия: 0,1 ≤ l11/l12 ≤ 1, а также с помощью подвесного устройства, в котором консоль опорного узла выполнена скобообразной формы с отношением максимального ее размера l13 к максимальному размеру l12 скобы основания, выбранным из условия: 0,2 ≤ l13/l12 ≤ 5.
На фиг. 1 изображена конструкция платформенного устройства; на фиг.2 - конструкция измерительного узла; на фиг.3 конструкция выполнения бесплатформенного устройства; на фиг.4 конструкция подвесного устройства.
Нецелесообразно детально останавливаться на известных из опубликованных источников особенностях заявленных объектов, в частности для способа на описании особенностей приведения в механический контакт взаимодействующих объектов и измерительных блоков до возникновения между ними механических силовых воздействий, измерения электромеханических параметров, определяемых величиной силового воздействия, передачи информации об электромеханических параметрах в микропроцессорный блок, обработки этих параметров и получения на основе этой обработки величин, характеризующих измеряемое воздействие.
Целесообразно детально описать отличительные существенные признаки способа, заключающиеся в том, что располагают n1 измерительных блоков и/или измерительных датчиков между произвольно расположенными в пространстве материальными объектами, где n1 выбирают из условия: 1≤n1≤ 103 по линиям их силового взаимодействия таким обpазом, что угол α между вектоpами силового воздействия материальных объектов и осями оптимального измерительного воздействия на блок выбирают из условия 0°≤ α ≤ 89°.
Это охватывает также случай осуществления способа с помощью напольных весов для измерения веса трудно поднимаемых человеком объектов, а также других видов весов. Предложенный способ может быть также использован при создании различного типа динамометрических устройств.
Часть n2 датчиков в общем случае реализации способа, где n2 удовлетворяет условию: 1≤ (n1 + n2)/n1 ≤2, устанавливают для измерения нормальных, т. е. направленных вдоль линии действия измеряемой силы, составляющих силовых воздействий, а часть n3, где n3 по отношению к n1 удовлетворяет условию: .
.
устанавливают для измерения тангенциальных, т.е. перпендикулярных направлению измеряемой силы составляющих силовых воздействий. При этом обеспечивают соотношение между измеряемыми тангенциальной P .
.
Часть n4 измерительных блоков, удовлетворяющая условию: ,
,
и/или n5 дополнительных измерительных блоков, причем n5 удовлетворяет условию: .
.
используют в качестве эталонных для калибровки нормальных и тангенциальных составляющих измеряемых воздействий.
Равенство нулю количеств измерительных блоков означает, в частности, зафиксированные в приведенных математических соотношениях альтернативы вариантов возможного неиспользования этих блоков.
В качестве измеряемого электрического параметра, связанного с силовым механическим воздействием, выбирают преимущественно изменение ΔCi емкости конденсатора Ci0 в зависимости от величины силового воздействия Pi.
Преобразуют параметр  в соответствующий ему параметр частоты fi электрического сигнала, связанный с ним соотношением
в соответствующий ему параметр частоты fi электрического сигнала, связанный с ним соотношением ,
,
где 10≤ a2i ≤ 106 Гц, 0,1 ≤ a2i ≤10, 1≤i≤ n1, 1 ≤ k2≤103,  , так, что 10-3 ≤ fi ≤ 108 Гц, в зависимости от выбора материала мембран, конструктивных особенностей, диапазона рабочих нагрузок.
, так, что 10-3 ≤ fi ≤ 108 Гц, в зависимости от выбора материала мембран, конструктивных особенностей, диапазона рабочих нагрузок.
Обрабатывают совокупность частот fi и находят их взаимосвязь с fiэт, используя зависимость f1 Fi(fiэт), типичный вид которой:
по которой определяют искомое значение Pi на основании зависимости
где 10-3 ≤Ai ≤103,  -10 ≤ a3ij ≤ 10, часто в виде Pi= Ai+Bi1fi+Bi2f
-10 ≤ a3ij ≤ 10, часто в виде Pi= Ai+Bi1fi+Bi2f
В качестве одного из вариантов практической реализации заявленного способа целесообразно охарактеризовать вариант выполнения платформенного устройства для измерения механических силовых воздействий, в частности веса (фиг. 1, 2), содержащего установленную на регулируемых опорах 1 платформу-основание 2 с размещенными на ней измерительными блоками 3 преобразования силовых воздействий и грузоприемную платформу 4, установленную на верхних частях датчиков 3. Длина l1 регулируемой части опор 1 выбрана по отношению к максимальному размеру l2 грузоприемной платформы 4 в пределах: 0,01 ≤ l1/l2 ≤0,5. Минимальное расстояние l3 между точками нагружения датчиков 3 и максимальная величина l4 этого расстояния взаимосвязаны соотношением: 0,1≤ l3/l4 ≤1, а величина l4 выбрана по отношению к l2 в пределах: 0,5 ≤ l4/l2 ≤1.
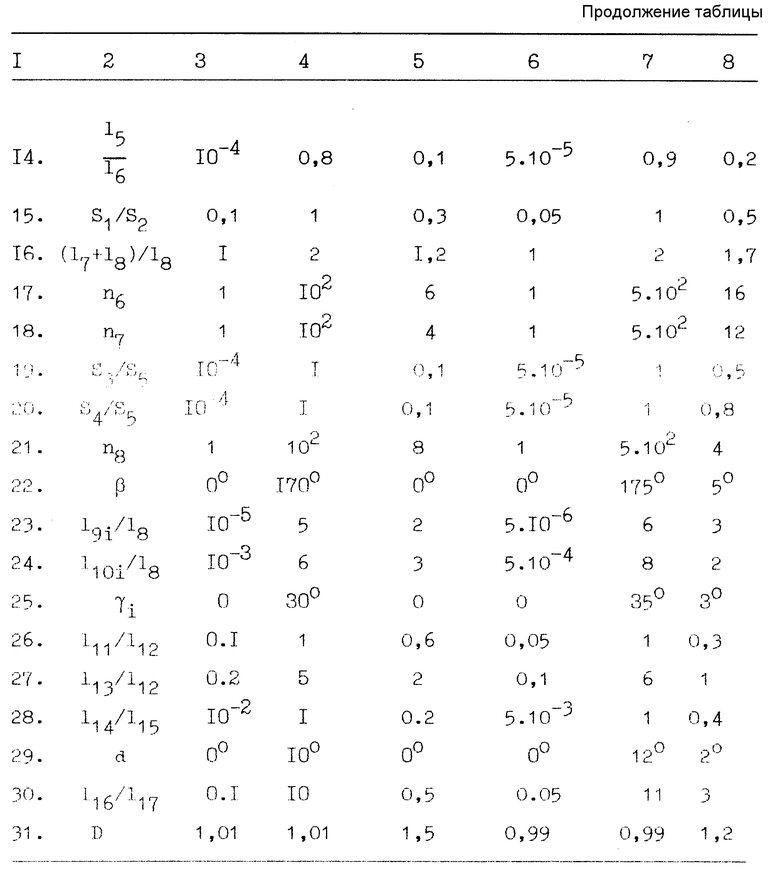
Измерительныe блоки 3 выполнены преимущественно в виде двух силовоспринимающих мембран 5 (фиг.2), минимальная толщина которых d, измеренная вдоль линии оптимального измерительного воздействия на измерительный блок, выбрана в зависимости от точки ее измерения по отношению к максимальному поперечному размеру мембраны l5 в пределах: 10-6 ≤ /l5 ≤102. При этом минимальное расстояние l6 между мембранами по отношению к максимальному поперечному размеру l5 мембраны удовлетворяет условию:
10-4 ≤ 6/l5 ≤ 0,8.
Толщина мембран d в ряде случаев может быть определена зависимостью d = A+Brα,, где r расстояние от линии приложения механического воздействия до точки измерения значения d, а A, B, α экспериментальные константы, определяемые материалом мембран, профилем их сечения, особенностями их изготовления, диапазоном нагрузок, выбраны в пределах 0 ≤ α ≤ 10, 10-3 ≤A≤10 [см] 0 ≤ B ≤ 10 [см1/α]
Минимальные S1i и максимальные S2i значения площадей обкладок 6 измерительного конденсатора 7, всех или части из них, жестко скреплены с силовоспринимающими мембранами, выбраны из условия: 0,1 ≤S1i/S2i≤1.
Работает платформенное устройство в качестве напольных весов следующим образом. Платформу-основание весов располагают, как правило, горизонтально с помощью регулируемых опор, так, что усилие, передаваемое от взвешивающего объекта через верхнюю платформу на измерительные блоки, совпадает по направлению с осями оптимального измерительного воздействия на эти блоки. Выходные сигналы с измерительных блоков представляют собой последовательность импульсов, частота следованиях которых зависит от усилия, приложенного к данному датчику. Частотные сигналы с датчиков поступают в блок управления весов и являются исходными данными для начисления нагрузки на каждый датчик и полного веса объекта в соответствии с предварительно установленным для используемых датчиков алгоритмом и предварительно записанными в электронную память параметрами конкретных используемых датчиков.
Отличительными особенностями бесплатформенного варианта устройства (фиг. 3) является то, что корпус 8 выполнен в виде емкости произвольной формы с минимальным размером l7, взаимосвязанным с его максимальным размером l8 соотношением: 1≤(l7 + l8)/l8 ≤2. Корпус изготовлен с n6 загрузочными и n7 разгрузочными отверстиями, причем выполнены условия: I≤ n6 ≤102 и I≤n7 ≤102. При этом суммарные площади S3 загрузочных и S4 разгрузочных отверстий выбраны по отношению к площади S5 внутренней поверхности корпуса 8 соответственно из условий: 10-4 ≤S3/S5 ≤1, 10-4 ≤S4/S5≤1, и отверстия выполнены с крышками и/или без них. На наружной поверхности корпуса установлены n8 опорных элементов 9, причем I≤ n8≤102, произвольной конфигурации, преимущественно в виде кронштейнов, установленных под углом β в пределах: 0°≤ β ≤ 170° по отношению к внешней поверхности корпуса. Максимальные размеры кронштейнов l9i, где I ≤i ≤ n8, выбраны по отношению к l8 из условия: 10-5≤l9i/l8≤5. Кронштейны через силопередающие узлы 10, выполненные преимущественно в виде шарниров и/или подпятников, соединены с измерительными блоками 11 таким образом, что точки приложения результирующего силового воздействия на измерительные элементы расположены относительно центра масс незагруженного корпуса 12 на расстояниях l10i, где I ≤1≤n8, выбраны по отношению к l8 из условия: 10-3 ≤l10i/l8 ≤6. Основания 13 выполнены регулируемыми для обеспечения условия 0°≤ γi≤ 30°, I ≤ i ≤ n8, где γi угол между результирующим вектором внешнего силового воздействия Pi и осью оптимального силового воздействия 14 для каждого из измерительных блоков в пределах: 0°≤ γi≤ 30°.
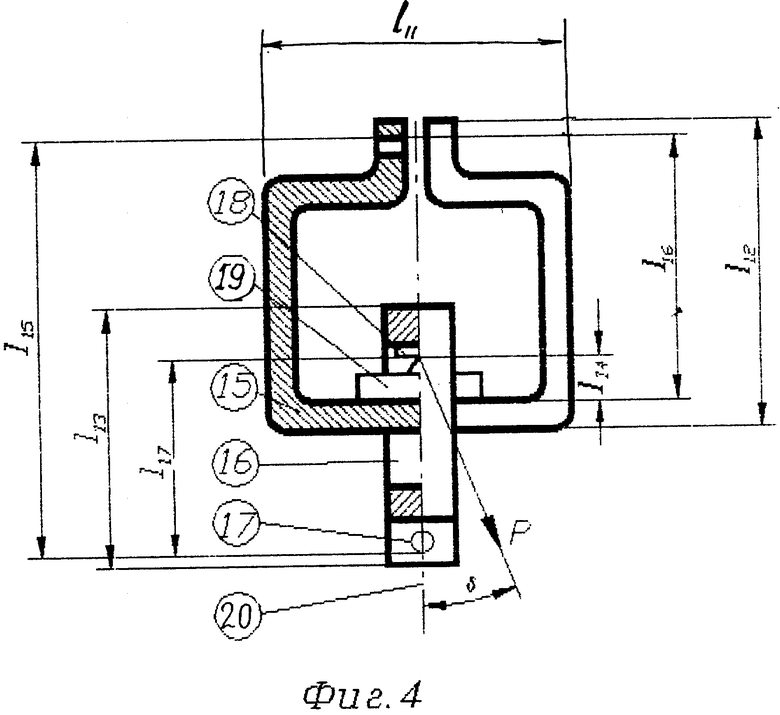
Отличительные признаки подвесного устройства (фиг.4) для осуществления способа измерения механических силовых воздействий заключается в том, что основание выполнено в виде консоли 15, преимущественно в виде скобы, с соотношением минимального l11 и максимального l12 размеров, определяемым условием: 0,1 ≤ l11/l12≤1.
Опорный узел 16 выполнен в виде консоли, преимущественно скобооразной формы, с максимальным размером l13, выбранным по отношению к l12 из условия: 0,2 ≤l13/l12≤5, составленной по крайней мере из двух элементов: элемента 17 приложения внешнего воздействия и элемента 18 передачи силового воздействия, на котором установлен силопередащий узел, соединяющий узел, соединенный с измерительным блоком 19. При этом расстояния l14 между точками приложения силовых воздействий к измерительному блоку выбрано по отношению к расстоянию l15 между точками приложения внешних силовых воздействий к консолям из условия: 10-2 ≤l14/l15≤I, а угол δ между осью оптимального силового воздействия на измерительный блок 20 и направлением результирующего внешнего воздействия P выбран из условия 0°≤ δ ≤ 10°.
Расстояния между точкой приложения внешнего силового воздействия к основанию и точкой передачи силового воздействия от основания к измерительному блоку l16 и расстояния l17 между точкой приложения внешнего силового воздействия к опорному узлу и точкой передачи силового воздействия опорным узлом к измерительному блоку выбраны из условия: 0,1 ≤ l16/l17 ≤10.
Работа описанных вариантов устройств определяется в соответствии с заявленным способом и не требует дополнительных пояснений.
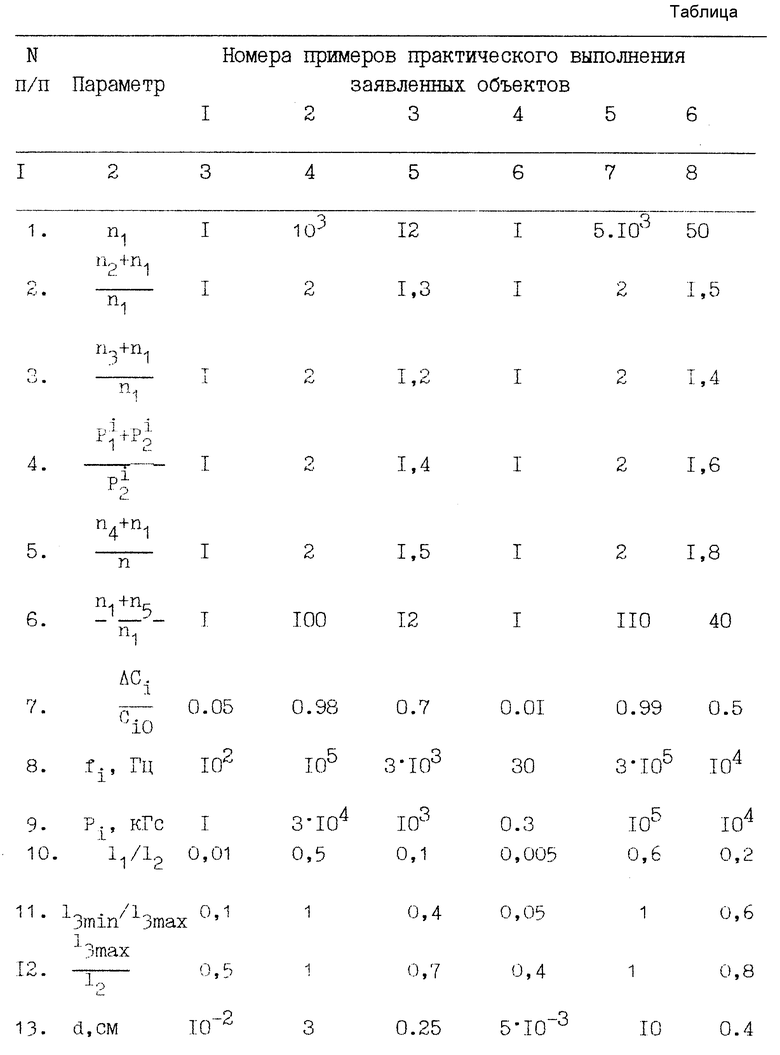
Как следует из вышеизложенного, указанный технический результат достигается только при взаимосвязанном неразрывном осуществлении всех существенных признаков, отраженных в формуле изобретения. Это также дополнительно подтверждается примерами практического выполнения заявленных объектов, количественные признаки которых представлены в таблице.
При сопоставлении примеров практического выполнения заявленных технических решений и прототипа удобно использовать параметр D, характеризующий соотношение их величин абсолютных погрешностей измерения максимальных значений механических силовых воздействий, в частности веса твердых либо заключенных в жесткую оболочку объектов.
В оптимальном варианте практического выполнения заявленных объектов (см. пример 3) удалось достичь значения параметра D, равного 1,5. Верхний и нижний пределы заявленных параметров были определены (см. соответственно примеры 1 и 2) на основании статистической обработки экспериментальных данных, а также анализа и обобщения опубликованных известных данных, исходя из условия приближения параметра D к единице (D1 1,01; D2 1,01). Как следует из таблицы, любой выход за нижний (см. пример 4) и за верхний (см. пример 5) пределы заявленных параметров приводит к невозможности достижения указанного технического результата (D4 0,99; D5 0,99). Пример 6 таблицы отражает произвольный вариант выполнения предложенных объектов с нахождением параметров внутри заявленных пределов (D6 1,2).
Кроме указанного технического результата при практическом осуществлении заявленных объектов достигается также увеличение чувствительности взвешивания при одновременном повышении устойчивости к механическим и температурным воздействиям.
Использование: в измерительной технике, в виде платформенного, подвесного и выполненного из независимых датчиков устройств для осуществления способа измерения механических силовых воздействий между материальными объектами, в частности веса объектов. Сущность изобретения: способ заключается в расположении и ориентации в пространстве между взаимодействующими материальными объектами измерительных блоков, преобразовании величин механического воздействия в параметры частоты электрического сигнала, передаче информации от измерительных блоков к блоку управления и ее математической обработке по заданному алгоритму. Устройства могут быть выполнены: первое - в виде установленной на регулируемых опорах платформы основания с блоками измерения и грузоприемной платформы, установленной на опорных частях блоков. Второе устройство содержит корпус в виде емкости произвольной формы, соединенной через опорные элементы и силопередающие узлы с измерительными блоками, установленными на основаниях. Третье устройство содержит измерительные блоки, расположенные на основании и соединенные через силоперадающий узел с опорным узлом. 4 с. и 5 з.п. ф-лы, 1 табл., 4 ил.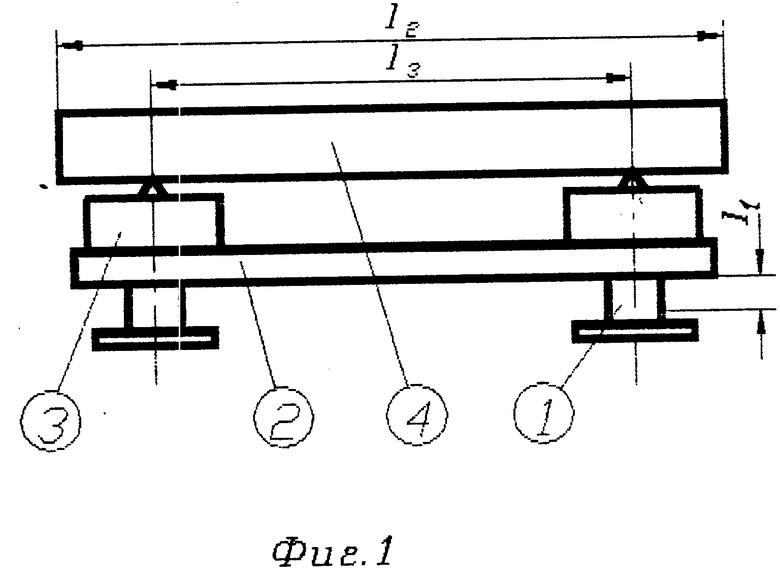
а часть n3 измерительных блоков для измерения тангенциальных, т.е. направленных перпендикулярно линии действия измеряемой силы, составляющих силовых воздействия, где n3 выбирают из условия
обеспечивая соотношение между тангенциальной P
где 1 ≤ i ≤ n1,
при этом часть n4 измерительных блоков, выбираемых из условия
и/или n5 дополнительных измерительных блоков, выбираемых из условия
используют в качестве эталонных для калибровки нормальных и тангенциальных составляющих измеряемых силовых воздействий, в качестве измеряемого электромеханического параметра, связанного с силовым механическим воздействием выбирают изменение ΔCi емкости Ci 0 конденсатора, выполненного в виде группы мембран, образующих датчик каждого измерительного блока, в зависимости от величины силового воздействия Pi, преобразуют параметр ΔCi/Ci0 в соответствующий ему электрический параметр частоту fi электрического сигнала, связанную с ΔCi/Ci0 соотношением
где 10 ≤ a2 i ≤ 106 Гц;
0,1 ≤ a2 i ≤ 10;
1 ≤ i ≤ n1;
1 ≤ k2 ≤ 103
так, что 10- 3 ≤ fi ≤ 108 Гц, в зависимости от выбора материала мембран, их конструктивных параметров, диапазона рабочих нагрузок, преобразуют совокупность частот fi с использованием зависимости
fi Kifi э т,
где  а искомые значения силовых воздействий Pi определяют на основании зависимости
а искомые значения силовых воздействий Pi определяют на основании зависимости
где 10-3 ≤ Ai ≤ 103; 
-10 ≤ a3ij ≤ 10,
выбираемые в зависимости от материала мембран, их конструктивных параметров и диапазона рабочих нагрузок.
3. Платформенное устройство для измерения механических силовых воздействий между материальными объектами, содержащее установленную на регулируемых опорах платформу-основание с размещенными на ней блоками измерения силовых воздействий, и грузоприемную платформу, установленную на опорных частях этих блоков, отличающееся тем, что отношение длины l1 регулируемой части опор к расстоянию l2 между максимально удаленными точками грузоприемной платформы выбрано из условия 0,01 ≤ l1/l2 ≤ 0,5, минимальное расстояние l3 по прямой, проходящей через геометрический центр грузоприемной платформы между точками нагружения блоков и максимальная величина l4 этого расстояния взаимосвязаны соотношением 0,1 ≤ l3/l4 ≤ 1, отношение величины l4 к величине l2 выбрано из условия
датчики блоков измерения выполнены в виде двух силовоспринимающих мембран, образующих измерительные конденсаторы, переменная толщина d по поверхности каждой мембраны выбрана в зависимости от ее максимального поперечного размера l5 из условия 10- 6 ≤ d/l5 ≤ 102, при этом отношение минимального расстояния l6 между мембранами к максимальному поперечному размеру l5 выбрано из условия
минимальные S1 i и максимальные S2 i значения площадей обкладок каждого измерительного конденсатора, жестко скрепленных с силовоспринимающими мембранами, выбраны из условия 0,1 ≤ S1 i/S2 i ≤ 1.
5. Устройство по п.4, отличающееся тем, что опорные элементы выполнены в виде кронштейнов, установленных под углом  выбранным из условия 0°≤ β ≤ 170° относительно внешней поверхности емкости, максимальные размеры l9i кронштейнов относительно максимального размера l8 емкости выбраны из условия 10- 5 ≤ l9 i/l8 ≤ 5.
выбранным из условия 0°≤ β ≤ 170° относительно внешней поверхности емкости, максимальные размеры l9i кронштейнов относительно максимального размера l8 емкости выбраны из условия 10- 5 ≤ l9 i/l8 ≤ 5.
| SU, авторское свидетельство N 1290086, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент N 4629019, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
