Предлагаемое изобретение относится к области лазерной локализации, лазерным связям, а также к системам доставки мощного рабочего излучения на воздушные и космические объекты. Преимущественная область использования предлагаемого изобретения - очистка космического околоземного пространства от различных малоразмерных объектов, представляющих опасность для современных космических аппаратов и спутников. К таким объектам относятся элементы конструкции отслуживших космических аппаратов, осколки от взрывов и столкновений и другой так называемый "космический мусор".
Известный способ очистки космического пространства от "космического мусора" заключается в обнаружении и определении пространственных координат θп объектов и наведении на данные объекты силового излучения от источника излучения, находящегося на поверхности земли. При воздействии мощного лазерного излучения на объект происходит нагрев его поверхности, абляция и ионизация тонкого слоя материала. При этом находящийся на космической орбите объект приобретает дополнительный импульс, изменяющий параметры его движения, в результате чего объект переходит на более низкую орбиту и через некоторое время сгорает в более плотных слоях атмосферы.
Использование силового лазерного излучения позволяет осуществлять очистку околоземного космического пространства от малоразмерных ( π = 1-10 см) нежелательных объектов, которые находятся на орбитах высотой от 200 до 1000 км и представляют значительную опасность для современных космических кораблей и спутников.
Важной проблемой при осуществлении доставки силового излучения на космические объекты является задача формирования на объекте силового излучения высокой плотности энергии. Получению высокой плотности энергии силового излучения на объекте препятствует атмосферный канал трассы распространения излучения "земля - космос". Наличие атмосферной турбулентности приводит к расплыванию лазерного пучка и уменьшению плотности энергии силового излучения на объекте, а также к снижению точности наведения силового излучения на объект.
Известен способ наведения и доставки силового излучения на космический объект [1], заключающийся в определении пространственных координат объекта, формировании силового излучения от источника, находящегося на земной поверхности, наведения силового излучения на космический объект посредством распределительного и наводящего зеркал, находящихся в космосе на космических орбитах. Данный способ обладает следующими двумя недостатками: невысокой плотностью энергии силового излучения, формируемого на объекте, и низкой точностью наведения излучения на объект.
Невысокая плотность энергии обусловлена тем, что импульс силового излучения, сформированный от источника, находящегося на земле, проходит через атмосферный канал трассы распространения излучения "земля - космос". При этом вследствие влияния атмосферной турбулентности происходит расплывание светового пучка и уменьшение плотности энергии. Компенсация атмосферной турбулентности отсутствует, а при дальнейшем распространении светового пучка в космическом пространстве вследствие возросшей расходимости плотность энергии в пучке уменьшается.
Влияние турбулентности атмосферы приводит к расплыванию пучка силового излучения, приходящего на расположенные в космосе наводящие зеркала. Вследствие этого координаты центра тяжести пучка силового излучения, его расходимость и направление в пространстве вектора диаграммы направленности приобретают значительную составляющую ошибки, что приводит к снижению точности наведения на объект силового излучения с неточно известными характеристиками направленности.
Известен способ адаптивной фокусировки излучения на объект через слой турбулентной атмосферы [2], заключающийся в подсвете объекта силовым излучением, через искажающую среду, приеме отраженного от объекта излучения, введении в пучок силового излучения фазовых предискажений и максимизации отраженного от объекта сигнала, путем подбора таких характеристик вносимых предискажений, которые приводят к наибольшей амплитуде отраженного от объекта сигнала. К недостаткам данного способа следует отнести низкую эффективность компенсации атмосферных искажений и. соответственно, невысокую плотность энергии силового излучения при работе по реальному движущемуся космическому объекту. Снижение плотности энергии и эффективности компенсации происходит вследствие того, что движущийся объект непрерывно уходит из зоны компенсации искажений (изопланатизма), поэтому точная адаптивная компенсация искажений на основе излучения, отраженного непосредственно от движущегося объекта, оказывается невозможной.
Наиболее близким по технической сущности к предлагаемому техническому решению является способ наведения излучения на объект [3], выбранный в качестве прототипа.
Данный способ заключается в определении координат объекта θ0, формировании импульса вспомогательного излучения в направлении измеренных координат объекта, приеме отраженного импульса вспомогательного излучения, формировании рабочего излучения посредством обращения волнового фронта отраженного импульса вспомогательного излучения, введении дополнительного наклона волнового фронта в рабочее излучение и направление рабочего излучения на объект через слой турбулентной атмосферы. К недостаткам данного способа следует отнести невысокую плотность энергии излучения на объекте вследствие низкой эффективности компенсации атмосферных искажений в канале распространения рабочего излучения при осуществлении доставки излучения на движущийся объект. Вследствие движения объекта, отраженное от объекта вспомогательное излучение, в котором фиксируются атмосферные искажения, и сформированное на основе обращения волнового фронта рабочее излучение, направляемое на объект, проходят по разным атмосферным каналам. Это обуславливает уменьшение эффективности и точности компенсации атмосферных искажений в рабочем излучении и, соответственно, уменьшение плотности энергии рабочего излучения на объекте.
Достигаемым техническим результатом является увеличение плотности энергии излучения на объекте, повышение эффективности компенсации атмосферных искажений, повышение точности наведения излучения на движущийся объект.
Новый технический результат достигается тем, что
1. В известном способе, заключающемся в определении координат объекта  (t0) в момент времени t0, формировании импульса вспомогательного излучения, приеме отраженного импульса вспомогательного излучения и формировании рабочего излучения посредством обращения волнового фронта отраженного импульса вспомогательного излучения, в момент времени t0 осуществляют определение дальности R0(t0) и скорости
(t0) в момент времени t0, формировании импульса вспомогательного излучения, приеме отраженного импульса вспомогательного излучения и формировании рабочего излучения посредством обращения волнового фронта отраженного импульса вспомогательного излучения, в момент времени t0 осуществляют определение дальности R0(t0) и скорости  (t0) объекта в системе координат, связанной с первой заданной точкой пространства A1, относительно которой осуществляют определение координат объекта
(t0) объекта в системе координат, связанной с первой заданной точкой пространства A1, относительно которой осуществляют определение координат объекта  (t0), импульс вспомогательного излучения направляют во вторую заданную точку пространства A2, отраженный импульс вспомогательного излучения формируют путем отражения импульса вспомогательного излучения во второй заданной точке пространства A2, в момент времени t1 прихода импульса вспомогательного излучения во вторую заданную точку пространства A2, определяют расстояние H(t1) между второй заданной точкой пространства A2 и источником рабочего излучения, после формирования рабочего излучения осуществляют его наведение из первой заданной точки пространства A1 в момент времени t2 в точку A3 ожидаемого нахождения объекта с координатами
(t0), импульс вспомогательного излучения направляют во вторую заданную точку пространства A2, отраженный импульс вспомогательного излучения формируют путем отражения импульса вспомогательного излучения во второй заданной точке пространства A2, в момент времени t1 прихода импульса вспомогательного излучения во вторую заданную точку пространства A2, определяют расстояние H(t1) между второй заданной точкой пространства A2 и источником рабочего излучения, после формирования рабочего излучения осуществляют его наведение из первой заданной точки пространства A1 в момент времени t2 в точку A3 ожидаемого нахождения объекта с координатами  , при этом расстояние между первой A1 и второй A2 заданными точками пространства равно Xп = Vt • T, где t2 = t1 + T;
, при этом расстояние между первой A1 и второй A2 заданными точками пространства равно Xп = Vt • T, где t2 = t1 + T;
Vt - тангенциальная составляющая скорости источника рабочего излучения относительно первой заданной точки пространства A1.
2. Способ по п.1, отличающийся тем, что координаты  точки A3 ожидаемого нахождения объекта в момент времени t3 прихода на объект рабочего излучения определяют на основании системы уравнений:
точки A3 ожидаемого нахождения объекта в момент времени t3 прихода на объект рабочего излучения определяют на основании системы уравнений:

C - скорость света;
отсчет всех моментов времени осуществляют относительно начального момента t0 = 0.
3. Комплекс для осуществления способа по п. 1, содержащий последовательно расположенные на оптической оси оптически связанные опорно-поворотное устройство с первым поворотным зеркалом, приводом и блоком управления, источник рабочего излучения с блоком накачки, вогнутое зеркало, лазерный усилитель с блоком накачки, блок обращения волнового фронта, первый объектив, задающий генератор с блоком накачки, а также блок синхронизации, подключенный к блокам накачки, и блок обработки информации, отличающийся тем, что введены размещенные на подвижной платформе летательного аппарата передающая телескопическая система с блоком вращения, оптически связанная со вторым поворотным зеркалом с блоком вращения, расположенные на выдвижной штанге ретрозеркало и второй объектив с установленным в его фокусе фотоприемником, блок перемещения, механически связанный с выдвижной штангой, блок определения координат, блок ориентации и блок координатной привязки, а также блок связи, расположенный в непосредственной близости от источника рабочего излучения и подключенный к системе внешнего целеуказания, выход которой подсоединен также к блоку синхронизации и блоку управления приводом первого поворотного зеркала, выходы блока обработки информации, размещенного на платформе летательного аппарата, подсоединены к блоку перемещения, первому и второму блокам вращения, блоку определения координат, блоку ориентации и блоку координатной привязки, оптический выход источника рабочего излучения посредством первого поворотного зеркала оптически связан через атмосферный канал трассы распространения излучения с оптическим входом передающей телескопической системы, ретрозеркалом и оптическим входом фотоприемника, размещенными на платформе летательного аппарата.
На фиг. 1 приведена блок-схема комплекса, реализующего предлагаемый способ, где введены следующие обозначения.
1 - первое опорно-поворотное устройство
2 - первое поворотное зеркало
3 - привод поворотного зеркала
4 - блок управления приводом
5 - источник рабочего излучения с блоком накачки 6
7 - вогнутое отражательное зеркало
8 - лазерный усилитель с блоком накачки 9
10 - блок обращения волнового фронта
11 - первый объектив
12 - задающий генератор с блоком накачки 13
14 - блок синхронизации
15 - блок связи
16 - платформа космического или воздушного летательного аппарата (КЛА)
17 - передающая телескопическая система
18 - сферическое зеркало
19 - плоское контр-зеркало
20 - второе поворотное зеркало
21 - первый блок вращения
22 - второй блок вращения
23 - ретрозеркало
24 - выдвижная штанга
25 - блок перемещения
26 - второй объектив
27 - фотоприемник
28 - блок обработки информации
29 - блок определения координат
30 - блок ориентации платформы КЛА
31 - блок координатной привязки
32 - система внешнего целеуказания - в состав комплекса не входит
33 - атмосферный канал распространения излучения
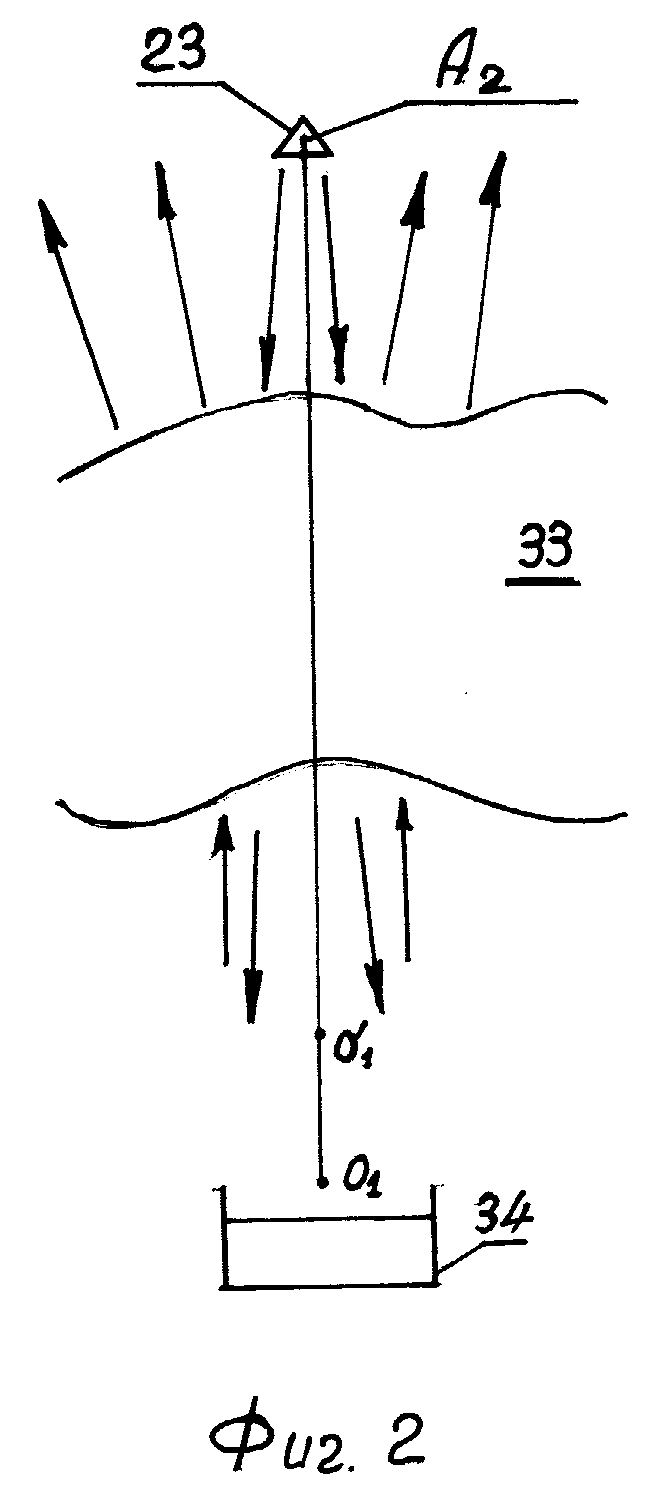
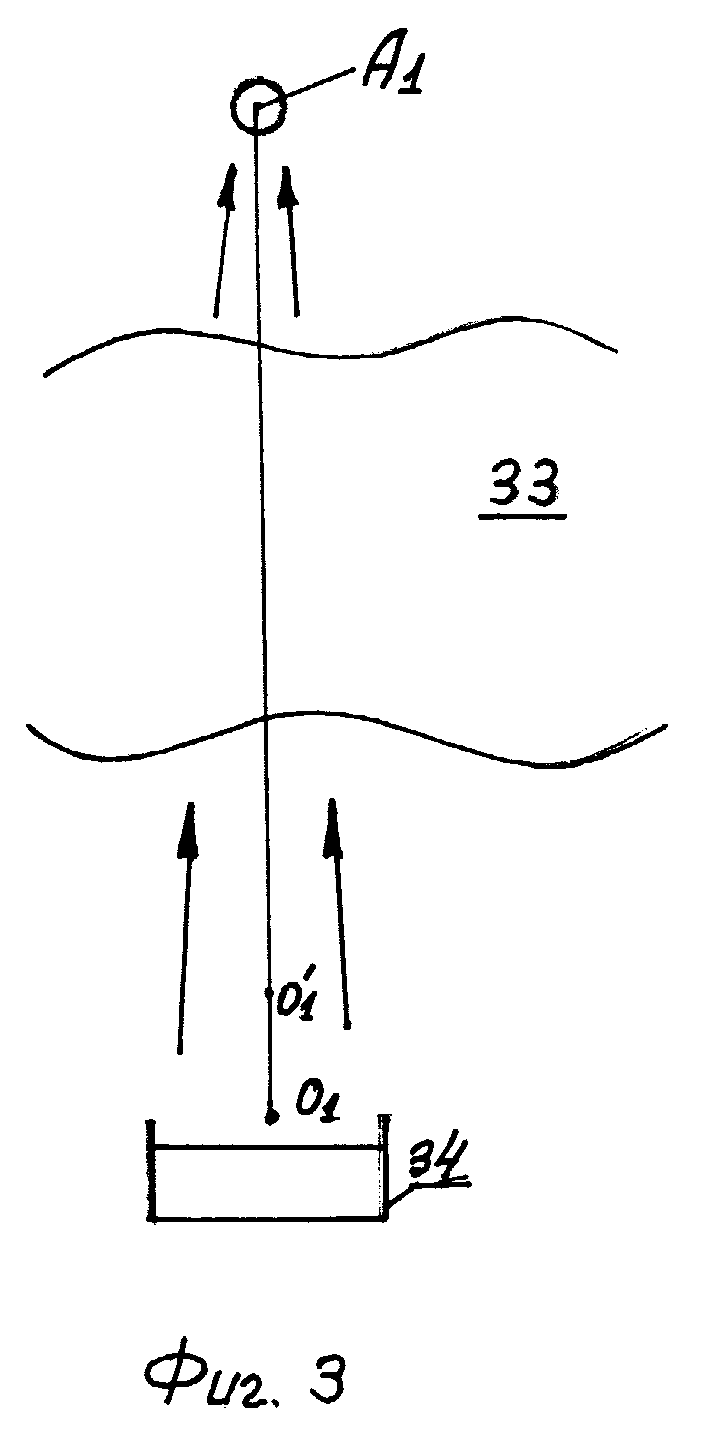
На фиг. 2 показан подсвет вспомогательным излучением области пространства с центром в заданной точке A2 через атмосферный канал поз. 33 и формирование импульса отраженного излучения в точке A2. Здесь условно показан источник рабочего излучения поз. 34. На фиг. 3 показан процесс наведения и фокусировки рабочего излучения с обращенным волновым фронтом в первую заданную точку пространства A1 через слой турбулентной искажающей среды (атмосферы) 33. O1 - координата источника рабочего излучения.
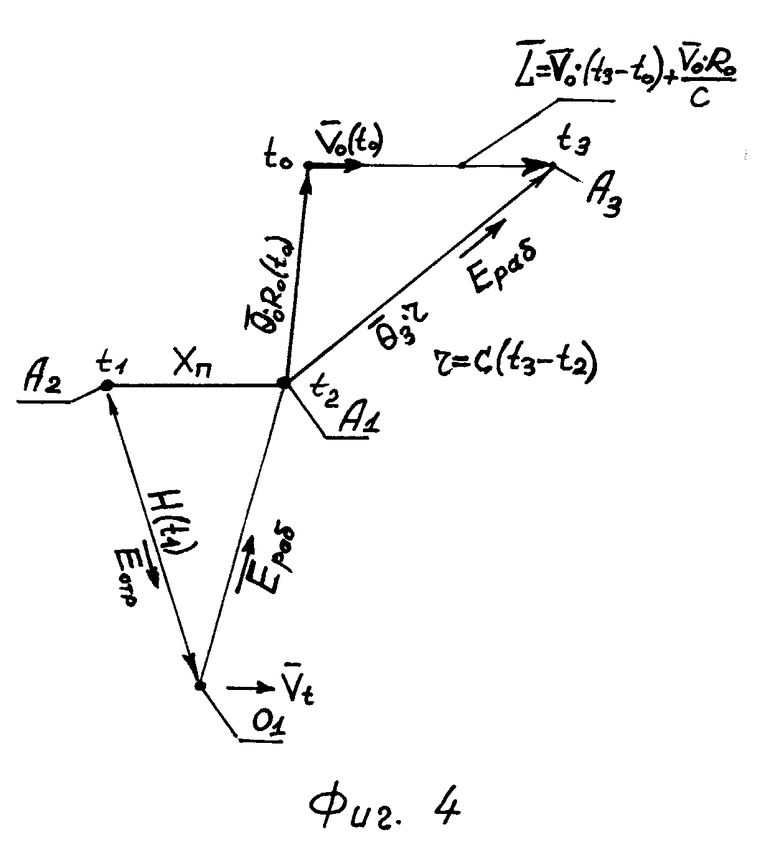
На фиг. 4 показана векторная диаграмма наведения и доставки рабочего излучения из точки O1 от источника рабочего излучения в первую заданную точку пространства A1. Далее из первой заданной точки A1 излучение доставляют в точку A3 нахождения объекта. Обозначения на фиг. 4 соответствуют описанию в тексте. Vt - тангенциальная скорость источника рабочего излучения (в точке O1) относительно первой заданной точки A1.
 вектор скорости объекта, определенный в момент времени t0 относительно точки A1.
вектор скорости объекта, определенный в момент времени t0 относительно точки A1.
 вектор расстояния, пройденного объектом от момента времени t0 определения его координат, до момента времени t3 нахождения объекта в точке A3.
вектор расстояния, пройденного объектом от момента времени t0 определения его координат, до момента времени t3 нахождения объекта в точке A3.
C - скорость света. Величина  поправка на истинное нахождение объекта в момент времени t0, определяемая перемещением объекта за время
поправка на истинное нахождение объекта в момент времени t0, определяемая перемещением объекта за время  распространения светового сигнала на расстояние R0 (t0). Скорость движения объекта является постоянной V0(t0) = const за время определения координат объекта и наведения и доставки на объект рабочего излучения.
распространения светового сигнала на расстояние R0 (t0). Скорость движения объекта является постоянной V0(t0) = const за время определения координат объекта и наведения и доставки на объект рабочего излучения.
В используемой главной системе координат первая заданная точка A1 является неподвижной и определяет начало отсчета координат.
Доставку рабочего излучения на объект на основе предложенного способа осуществляют следующим образом.
Рассматривается пример реализации предлагаемого способа доставки рабочего излучения на объект, находящийся на космической околоземной орбите. Источник рабочего излучения (поз. 5 на фиг. 1) находится на поверхности земли. Координата источника рабочего излучения (точка стояния) соответствует точке O1 - центру поворотного зеркала 2 (фиг. 1). Доставку излучения на объект осуществляют через атмосферный канал поз. 33 трассы распространения земля-космос. Для осуществления наведения рабочего излучения на объект используют платформу космического летательного аппарата 16 (КЛА), также находящегося на околоземной орбите с известными параметрами движения. Система внешнего целеуказания поз. 22 осуществляет непрерывную выдачу текущих координат и скорости движения по орбите Vn платформы КЛА 16. Одновременно система ВЦУ 32 выдает также текущие параметры движения по орбите объекта, на который необходимо навести и доставить силовое излучение.
Формирование рабочего излучения, его наведение и доставку на объект осуществляют следующим образом.
В некоторый произвольный фиксированный момент времени t0 осуществляют определение координат объекта  (t0). Определение координат объекта осуществляют с помощью блока определения координат 29, расположенного на борту платформы 16 КЛА. В качестве блока определения координат 29 используют, например, лазерный локатор бортового базирования.
(t0). Определение координат объекта осуществляют с помощью блока определения координат 29, расположенного на борту платформы 16 КЛА. В качестве блока определения координат 29 используют, например, лазерный локатор бортового базирования.
Определение координат объекта  (t0) осуществляют в системе координат, связанной с первой заданной точкой пространства A1 (см. фиг. 1).
(t0) осуществляют в системе координат, связанной с первой заданной точкой пространства A1 (см. фиг. 1).
Первая заданная точка A1 пространства фиксирована относительно платформы 16 КЛА и совмещена с фокусом сферического зеркала 18 передающей телескопической системы 17, находящейся на борту платформы 16 КЛА. В дальнейшем точка A1 является началом отсчета главной системы координат, относительно которой осуществляют отсчет и определение координат объекта и всех элементов предлагаемого комплекса.
Момент времени t0 определения координат объекта  (t0) является началом отсчета всех последующих интервалов и моментов времени t1 - t3. При осуществлении дальнейших отсчетов времени момент времени t0 принимают равным нулю t0=0. Одновременно, в момент времени t0 осуществляют определение дальности R (t0) до объекта и скорости
(t0) является началом отсчета всех последующих интервалов и моментов времени t1 - t3. При осуществлении дальнейших отсчетов времени момент времени t0 принимают равным нулю t0=0. Одновременно, в момент времени t0 осуществляют определение дальности R (t0) до объекта и скорости  его движения. Указанные параметры движения объекта по его орбите для момента времени t0 определяют в системе координат относительно первой A1 заданной точки пространства. В результате этого для всех последующих моментов времени t>t0 положение объектов относительно первой заданной точки A1 пространства является известным и может быть вычислено (прогнозируемо). Эту операцию определения координат, дальности Rо и скорости объекта Vo относительно первой заданной точки A1 пространства осуществляют с помощью блока определения координат 29, который представляет собой специализированный лазерный или радиолокатор, в котором раздельно осуществляют определение текущих угловых координат, дальности и радиальной скорости объекта относительно точки расположения A1. Одновременно в блоке определения координат 29 определяют и тангенциальную составляющую скорости объекта относительно точки A1 на основе измерения изменения текущих угловых координат объекта за малый фиксированный промежуток времени Δt. При этом тангенциальную составляющую скорости V0t объекта вычисляют (в блоке обработки информации 28) по формуле
его движения. Указанные параметры движения объекта по его орбите для момента времени t0 определяют в системе координат относительно первой A1 заданной точки пространства. В результате этого для всех последующих моментов времени t>t0 положение объектов относительно первой заданной точки A1 пространства является известным и может быть вычислено (прогнозируемо). Эту операцию определения координат, дальности Rо и скорости объекта Vo относительно первой заданной точки A1 пространства осуществляют с помощью блока определения координат 29, который представляет собой специализированный лазерный или радиолокатор, в котором раздельно осуществляют определение текущих угловых координат, дальности и радиальной скорости объекта относительно точки расположения A1. Одновременно в блоке определения координат 29 определяют и тангенциальную составляющую скорости объекта относительно точки A1 на основе измерения изменения текущих угловых координат объекта за малый фиксированный промежуток времени Δt. При этом тангенциальную составляющую скорости V0t объекта вычисляют (в блоке обработки информации 28) по формуле
где угловые координаты объекта в последовательные моменты времени t0 и t0+Δt;
угловые координаты объекта в последовательные моменты времени t0 и t0+Δt;
Δt - малый фиксированный промежуток времени;
R(t0) - дальность (расстояние) до объекта в момент t0.
Таким образом, посредством блока определения координат 29 осуществляют определение вектора скорости  (t0) объекта в момент времени t0 относительно первой заданной точки пространства A1. В дальнейшем скорость
(t0) объекта в момент времени t0 относительно первой заданной точки пространства A1. В дальнейшем скорость  (t0) считают постоянной величиной, так как определение координат и наведение рабочего излучения на объект осуществляют за достаточно малые промежутки времени.
(t0) считают постоянной величиной, так как определение координат и наведение рабочего излучения на объект осуществляют за достаточно малые промежутки времени.
Информация об измеренных параметрах движения объекта в момент времени t0 относительно точки A1 поступает от блока определения координат 29 в блок обработки информации 28. В блоке 28 осуществляют определение угловых координат объекта θ1 для любого заданного последующего момента времени t на основании следующего векторного соотношения:
Здесь
C - скорость света; единичный вектор координат объекта относительно точки A1 в момент времени t0;
единичный вектор координат объекта относительно точки A1 в момент времени t0;
R(t0) - дальность до объекта относительно точки A1 в момент t0; скорость объекта в момент t0 относительно точки A1;
скорость объекта в момент t0 относительно точки A1; вектор координат объекта относительно точки A1 в момент времени t>t0;
вектор координат объекта относительно точки A1 в момент времени t>t0; - поправка для координат объекта в момент t0, обусловленная перемещением объекта за время Δτ распространения излучения (света) от объекта до точки A1 (блок определения координат 29)
- поправка для координат объекта в момент t0, обусловленная перемещением объекта за время Δτ распространения излучения (света) от объекта до точки A1 (блок определения координат 29) 
Параметры движения объекта  измерены посредством блока измерения координат 29 для момента времени t0.
измерены посредством блока измерения координат 29 для момента времени t0.
Векторное соотношение (1) соответствует векторной диаграмме, приведенной на фиг. 4, где показан вектор координат объекта для некоторого момента времени t = t3. В момент времени t=t3 осуществляют доставку рабочего излучения на объект в точку нахождения объекта A3.
Информации о текущих параметрах движения объекта, получаемая от системы внешнего целеуказания, имеет предварительный характер, эту информацию используют для грубого предварительного наведения блока измерения координат 29 (бортового локатора) на объект. Точное определение координат объекта осуществляют (на момент времени t0) посредством блока определения координат 29.
Формирование рабочего излучения и наведение его на объект осуществляют следующим образом.
Осуществляют формирование импульса вспомогательного излучения с помощью задающего лазерного генератора 12 и лазерного усилителя 8 путем их одновременной накачки посредством блоков накачки 9, 13. Источник вспомогательного излучения (поз. 8, 12) оптически сопряжен с источником рабочего излучения 5 и блоком обращения волнового фронта 10. Указанные источники рабочего и вспомогательного излучения расположены на одной оптической оси и работают на одной и той же рабочей длине волны λраб. Сформированный импульс вспомогательного излучения направляют во вторую заданную точку A2 пространства, которая так же, как и точка A1, фиксирована относительно платформы 16 летательного аппарата. Заданная точка A2 расположена на расстоянии Xn от первой заданной точки A1, которая является началом отсчета главной системы координат.
Импульс вспомогательного излучения направляют во вторую заданную точку A2 пространства с помощью первого опорно-поворотного устройства 1 и поворотного зеркала 2. По сигналам внешнего целеуказания 32, поступающим в блок управления привода 4, поворотное зеркало 2 устанавливают таким образом, чтобы визирная линия O1-O1 передающего наземного источника рабочего излучения была направлена на платформу 16 космического летательного аппарата во вторую заданную точку A2, которая жестко связана (фиксирована) с платформой 16 КЛА. При этом все параметры движения платформы 16 КЛА H(t) и Vn по орбите известны и непрерывно поступают от системы внешнего целеуказания 32. В результате этого осуществляют подсвет импульсом вспомогательного излучения локальной области пространства с центром во второй заданной точке A2 (см. фиг. 2). В этой локальной области пространства располагают ретрозеркало (уголковый отражатель) 23, центр которого совмещают со второй заданной точкой пространства A2. Ретрозеркало 23 жестко закреплено на выдвижной штанге 24, укрепленной в блоке перемещения 25, который установлен и жестко связан с платформой 16 КЛА. С помощью блока перемещения 25 изменяют расстояние от второй заданной точки A2 с размещенным в ней ретрозеркалом 23 до первой заданной точки A1, с которой совмещен фокус передающей телескопической системы 17. Расстояние Xп от точки A2 до точки A1 устанавливают с помощью блока перемещения 25 по сигналам управления, поступающим в этот блок от блока обработки информации 28.
В результате подсвета области пространства с центром в точке A2 импульсом вспомогательного излучения формируют отраженный импульс вспомогательного излучения, путем отражения импульса вспомогательного излучения во второй заданной точке A2 пространства.
Отраженный импульс вспомогательного излучения формируют посредством отражения вспомогательного излучения от ретрозеркала 23 в точке A2 (см. фиг. 2). В момент формирования отраженного импульса определяют момент времени t1 отражения импульса вспомогательного излучения от ретрозеркала 23, т.е. от локальной области пространства с центром во второй заданной точке A2. Для определения и регистрации этого момента времени t1 рядом с ретрозеркалом размещают объектив 26 и фотоприемник 27, установленный в фокусе объектива 26. Фотоприемником 27 регистрируют световой импульс в момент прихода t1 подсвечивающего импульса вспомогательного излучения на ретрозеркало 23. Этот момент t1 считают соответствующим моменту времени отражения импульса вспомогательного излучения от локальной области пространства с центром во второй A2 заданной точке.
Импульсный сигнал с выхода фотоприемника 27 направляют в блок обработки информации 28, в котором фиксируют момент времени t1 формирования отраженного импульса и используют эту информацию для осуществления наведения рабочего излучения на объект.
В момент времени t1 прихода импульса вспомогательного излучения во вторую заданную точку пространства A2 (на ретрозеркало 23) определяют расстояние H(t1) между второй заданной точкой A2 и источником рабочего излучения 5. Это расстояние H(t1) определяют по сигналам внешнего целеуказания от системы ВЦУ 32, которая непрерывно выдает информацию о параметрах движения платформы 16 КЛА - через блок связи 15 и через блок координатной привязки 31 на вход блока обработки информации 28. При этом в блок обработки информации 28 поступают данные о величине расстояния H(t) в любой текущий и будущий момент времени t. На основании этого в блоке обработки информации 28 в момент фиксации прихода импульса вспомогательного излучения на фотоприемник 26 (в момент времени t1) определяют и соответствующее этому моменту времени t1 расстояние H(t1) от платформы 16 КЛА до источника рабочего излучения 5 (точка O1 поз. 2 на фиг. 1) по информации, поступившей от системы внешнего целеуказания 32 о параметрах движения платформы 16 КЛА. Одновременно в блок обработки информации 28 от системы ВЦУ-32 поступает информация о скорости Vп платформы КЛА относительно источника рабочего излучения 5.
Информацию о величине H(t1) используют далее для определения момента прихода t2 сформированного импульса рабочего излучения в первую заданную точку пространства A1, из которой осуществляют наведение рабочего излучения и его доставку на объект.
При этом следует отметить, что расстояние от первой заданной точки A1 до источника рабочего излучения H(t1) равно расстоянию от второй заданной точки A2 до источника рабочего излучения в этот же момент времени t1 и в ближайшие малые промежутки времени наведения излучения на объект, так как H(t1)>>Xп - расстояние H(t1) значительно больше расстояния между первой A1 и второй A2 заданными точками, а также вследствие того, что платформа 16 КЛА ориентирована таким образом, что тангенциальная составляющая ее скорости относительно источника рабочего излучения Vt параллельна выдвижной штанге, т.е. параллельна направлению (вектору) из точки A1 в точку A2, а радиальная составляющая VR скорости платформы близка к нулю. Таким образом, поступающая от ВЦУ-32 информация о расстоянии до платформы 16 КЛА от источника рабочего излучения в любой момент времени t соответствует расстоянию H(t) от источника рабочего излучения до второй заданной точки пространства A2.
Отраженный импульс имеет направление вектора распространения  противоположное вектору направленности
противоположное вектору направленности  исходного импульса вспомогательного излучения
исходного импульса вспомогательного излучения  В результате отраженный импульс вспомогательного излучения проходит обратно по тому же пути, по которому распространялся сформированный ранее исходный импульс вспомогательного излучения (см. фиг. 2). Далее осуществляют прием отраженного импульса вспомогательного излучения и формируют на его основе импульс рабочего излучения.
В результате отраженный импульс вспомогательного излучения проходит обратно по тому же пути, по которому распространялся сформированный ранее исходный импульс вспомогательного излучения (см. фиг. 2). Далее осуществляют прием отраженного импульса вспомогательного излучения и формируют на его основе импульс рабочего излучения.
Прием отраженного импульса вспомогательного излучения осуществляют с помощью поворотного зеркала 2. Отраженный импульс вспомогательного излучения приходит на поворотное зеркало 2 (в точку O1 центром своей диаграммы направленности), откуда было осуществлено излучение сформированного вспомогательного импульса излучения.
Следует отметить, что после излучения сформированного импульса вспомогательного излучения поворотное зеркало 2 фиксируют и положения его не изменяют до осуществления приема отраженного импульса и формирования рабочего излучения.
Принимаемый отраженный импульс вспомогательного излучения проходит через источник рабочего излучения 5, через лазерный усилитель 8 и поступает в блок обращения волнового фронта 10. С помощью вогнутого зеркала 7 осуществляют фокусировку принимаемого отраженного импульса вспомогательного излучения в центре блока обращения волнового фронта 10. Формирование рабочего излучения осуществляют посредством обращения волнового фронта принимаемого отраженного импульса вспомогательного излучения с помощью блока обращения волнового фронта 10. Сформированный импульс с обращенным волновым фронтом проходит в обратном ходе через лазерный усилитель 8 и источник рабочего излучения 5, представляющий собой квантовый усилитель высокой мощности. Далее сформированный импульс рабочего излучения с обращенным волновым фронтом после отражения от поворотного зеркала 2 проходит в обратном порядке через тот же атмосферный канал, по которому прошел отраженный от ретрозеркала в точке A2 импульс вспомогательного излучения. Вследствие того, что сформированный импульс рабочего излучения имеет волновой фронт, обращенный к волновому фронту исходного отраженного импульса вспомогательного излучения, на обратном проходе автоматически компенсируются искажения, связанные с неоднородностями турбулентной атмосферы, а также неоднородности активной среды источника рабочего излучения 5 и лазерного усилителя 8. В результате рабочее излучение доставляют точно в исходную точку (локальную область), из которой был сформирован и излучен отраженный импульс вспомогательного излучения (см. фиг. 3). Рабочее излучение является сфокусированным в этой локальной области пространства с высокой плотностью энергии в световом пучке. Область локализации рабочего излучения соответствует по размерам ретрозеркалу 23 (апертуре ретрозеркала 23), с помощью которого был сформирован отраженный импульс вспомогательного излучения. Следует отметить, что размер этой области и апертуры ретрозеркала 23 выбирают небольшим, соответствующим размеру области в сечении светового пучка исходного вспомогательного излучения, в пределах которой интенсивность пучка равномерна, а волновой фронт плоский.
В результате доставленное в исходную локальную область пространства (точку A2) рабочее излучение имеет квазиплоский волновой фронт в области фокусировки, высокую однородность распределения интенсивности и высокую плотность энергии. Из этой области фокусирования (концентрации) рабочего излучения осуществляют далее наведение рабочего излучения на объект в точку ожидаемого нахождения объекта с координатами 
Рабочее излучение с обращенным волновым фронтом сформировано на основе импульса вспомогательного излучения, отраженного в момент времени t1 от локальной области пространства с центром во второй заданной точке A2 пространства. При этом, как было отмечено, вторая заданная точка A2 жестко связана (фиксирована) относительно первой A1 заданной точки и платформы 16 КЛА. Сформированное рабочее излучение с ОВФ автоматически фокусируется в исходной точке пространства, из которой был сформирован и излучен отраженный импульс вспомогательного излучения в момент времени t1. На этот момент времени t1 эта локальная область пространства совпадает со второй заданной точкой пространства A2. Таким образом, рабочее излучение с ОВФ автоматически концентрируется и возвращается в ту же точку пространства относительно неподвижного источника рабочего излучения 5 и поворотного зеркала 2, но в следующий момент времени t2, который связан с моментом времени t1 соотношением:
где
T - время двойного прохождения светового сигнала от точки A2 (ретрозеркала 23 в момент времени t1) и обратно;
H(t1) - расстояние между второй заданной точкой пространства A2 и источником рабочего излучения 5, которое было определено ранее в момент времени t1 отражения импульса вспомогательного излучения от локальной области пространства с центром в заданной точке A2;
C - скорость света.
За промежутком времени (t2 - t1) = T происходит перемещение платформы 16 КЛА, вследствие чего сформированный импульс рабочего излучения поступает в первую заданную точку пространства A1, в которой помещен фокус передающей телескопической системы 17. Расстояние между первой A1 и второй A2 заданными точками пространства Xп = A2 - A1 равно
Xп = Vt • T (3)
в системе координат, связанной с первой A1 заданной точкой пространства,
где
T - указанный в формуле (2) промежуток времени;
Vt - тангенциальная составляющая скорости источника рабочего излучения 5 в системе координат относительно первой A1 заданной точки пространства.
В целом платформа 16 КЛА движется с определенной скоростью Vп относительно находящегося на земле источника рабочего излучения 5, при этом известны все параметры движения платформы 16 КЛА для любого момента времени (по данным внешнего целеуказания), в том числе и тангенциальная составляющая скорости платформы 16 КЛА относительно источника рабочего излучения 5. Однако, как было отмечено, главной системой координат выбрана система с началом отсчета в первой заданной точке A1. В этой системе координат точка A1 неподвижна, а источник рабочего излучения имеет тангенциальную скорость Vt, которая и указана в формуле (3).
За точку нахождения (фиксации) источника рабочего излучения принимают точку O1 - центра поворотного зеркала 2 на фиг. 1. Величина расстояния Xп по формуле (3) между первой A1 и второй A2 заданными точками пространства определяет расстояние между ретрозеркалом 23, центр которого помещен в точку A2, и фокусом передающей телескопической системы 17, который совмещают с первой заданной точкой пространства A1. Величину этого расстояния Xп устанавливают заранее с помощью выдвижной штанги 24 и блока перемещения 25, на который подают соответствующий управляющий сигнал с блока обработки информации 28. Таким образом, в фиксированный известный момент времени t2 (3) обеспечивают поступление импульса рабочего излучения с высокой концентрацией энергии в локальной области пространства в первую заданную точку пространства A1. Первую заданную точку пространства A1 совмещают с фокусом передающей телескопической системы 17, посредством которой осуществляют формирование рабочего излучения высокой направленности и высокой плотности энергии в сечении рабочего пучка. Одновременно с помощью передающей телескопической системы 17 и второго поворотного зеркала 20 осуществляют наведение рабочего излучения из первой заданной точки пространства A1 на объект в точку A3 ожидаемого нахождения объекта с координатами  относительно первой A1 заданной точки пространства.
относительно первой A1 заданной точки пространства.
Координаты  точки A3 ожидаемого нахождения объекта определяют на момент времени t3 прихода в эту точку на объект рабочего излучения, наведение которого осуществляют, как было отмечено, в момент времени t2 прихода рабочего излучения в первую заданную точку A1. За время (t3 - t2) рабочее излучение пройдет расстояние r от точки A1 до точки A3, которое равно
точки A3 ожидаемого нахождения объекта определяют на момент времени t3 прихода в эту точку на объект рабочего излучения, наведение которого осуществляют, как было отмечено, в момент времени t2 прихода рабочего излучения в первую заданную точку A1. За время (t3 - t2) рабочее излучение пройдет расстояние r от точки A1 до точки A3, которое равно
r = c•(t3 - t2), (4)
где C - скорость света.
Ранее было отмечено, что в блоке обработки информации 28 осуществляют определение угловых координат объекта относительно точки A1 для любого последующего момента времени t > t0 = 0 на основании векторного соотношения (1). Для наведения рабочего силового излучения из точки A1 в точку A3 для некоторого момента времени t3 используют следующее векторное соотношение для определения угловых координат  объекта на момент времени t3:
объекта на момент времени t3:
Здесь величину t2 определяют из соотношения (2) на момент времени t1:
C - скорость света.
(см. фиг. 4).
Вектор  является единичным вектором
является единичным вектором 
Угловые координаты  ожидаемого нахождения объекта в точке A3 в момент времени t3, необходимые для наведения силового излучения из точки A1 на объект, определяют с помощью блока обработки информации 28 в момент времени t1 прихода импульса вспомогательного излучения в точку A2 на ретрозеркало 23 и фотоприемник 27. При этом сигнал с выхода фотоприемника 27 подают на вход блока обработки информации 28 и этим задают момент t2 прихода сформированного силового излучения в первую заданную точку A1 в фокус передающей телескопической системы 17. К моменту времени t2 устанавливают необходимое положение передающей телескопической системы 17 и второго поворотного зеркала 20, для наведения рабочего излучения из точки A1 в точку A3 на объект. К моменту времени t1 в блоке обработки информации 28 имеются все данные для определения координат объекта
ожидаемого нахождения объекта в точке A3 в момент времени t3, необходимые для наведения силового излучения из точки A1 на объект, определяют с помощью блока обработки информации 28 в момент времени t1 прихода импульса вспомогательного излучения в точку A2 на ретрозеркало 23 и фотоприемник 27. При этом сигнал с выхода фотоприемника 27 подают на вход блока обработки информации 28 и этим задают момент t2 прихода сформированного силового излучения в первую заданную точку A1 в фокус передающей телескопической системы 17. К моменту времени t2 устанавливают необходимое положение передающей телескопической системы 17 и второго поворотного зеркала 20, для наведения рабочего излучения из точки A1 в точку A3 на объект. К моменту времени t1 в блоке обработки информации 28 имеются все данные для определения координат объекта  в точке A3 на основании векторного соотношения (5). К моменту времени t2 посредством блока обработки информации 28 осуществляют определение координат точки ожидаемого положения объекта
в точке A3 на основании векторного соотношения (5). К моменту времени t2 посредством блока обработки информации 28 осуществляют определение координат точки ожидаемого положения объекта  выдачу управляющих сигналов от блока обработки информации 28 на блоки вращения 21, 22 и устанавливают поворотное зеркало 20 и передающую телескопическую систему 17 в соответствующее требуемое положение. В момент времени t2 осуществляют наведение рабочего излучения из первой заданной точки A1 на объект и обеспечивают доставку рабочего излучения на объект в точку нахождения объекта A3 на момент времени t3.
выдачу управляющих сигналов от блока обработки информации 28 на блоки вращения 21, 22 и устанавливают поворотное зеркало 20 и передающую телескопическую систему 17 в соответствующее требуемое положение. В момент времени t2 осуществляют наведение рабочего излучения из первой заданной точки A1 на объект и обеспечивают доставку рабочего излучения на объект в точку нахождения объекта A3 на момент времени t3.
На этом цикл доставки рабочего излучения на объект завершен.
Рассмотрим подробнее операции собственно наведения рабочего излучения на объект на основании информации о параметрах движения объекта и платформы 16 КЛА.
В момент времени t1, который фиксируют приходом импульсного сигнала вспомогательного излучения с выхода фотоприемника 27 в блок обработки информации 28, определяют момент времени t2 по формуле (2) посредством блока обработки информации 28.
Далее в блоке обработки информации 28 определяют угловые координаты  точки A3 на момент времени t3 доставки мощного рабочего излучения на объект на основании векторного уравнения (5):
точки A3 на момент времени t3 доставки мощного рабочего излучения на объект на основании векторного уравнения (5): (6)
(6)
Здесь единичный вектор из точки A1 в точку A3.
единичный вектор из точки A1 в точку A3.
Векторное уравнение (6) соответствует следующей системе из 4-х скалярных уравнений:
На основании решений уравнений (7) в блоке обработки информации определяют составляющие  вектора угловых координат
вектора угловых координат  и момент времени t3.
и момент времени t3.
Полученные данные об угловых координатах  подают от блока обработки информации 28 на блоки вращения 21, 22 и устанавливают поворотное зеркало 20 и передающую телескопическую систему 17 в соответствующее положение, которое обеспечивает наведение мощного рабочего излучения в точку A3 на объект.
подают от блока обработки информации 28 на блоки вращения 21, 22 и устанавливают поворотное зеркало 20 и передающую телескопическую систему 17 в соответствующее положение, которое обеспечивает наведение мощного рабочего излучения в точку A3 на объект.
Все моменты времени t1 - t3 определяют относительно исходного момента времени t0= 0.
Система наведения мощного рабочего излучения на объект содержит передающую телескопическую систему 17 и второе поворотное зеркало 20, размещенные на борту платформы 16 КЛА. Ось вращения телескопической системы 17 O2 - O2 проходит через ее фокус f, совмещенный с первой заданной точкой пространства A1. С помощью блока вращения 21 осуществляют поворот на заданный угол вращения ϕ1 телескопической системы 17 и жестко с ней связанного второго поворотного зеркала 20 с его блоком вращения 22. При этом фокус телескопической системы остается совмещенным с первой заданной точкой пространства A1. С помощью второго блока вращения 22 осуществляют поворот на заданный угол ϕ2 второго поворотного зеркала 20. В результате сформированное передающей телескопической системой 17 высоконаправленное мощное рабочее излучение направляют из точки A1 в любую заданную точку пространства. На фиг. 1 в качестве примера показано выполнение передающей телескопической системы 17 на основе схемы Ньютона. Возможно использование других телескопических систем, например, системы с внеосевым расположением фокуса, в которой отсутствует затенение сформированного пучка контрзеркала 19. В качестве блоков вращения 21, 22 используют, например, приводные системы на основе шаговых электродвигателей, снабженных управляющими блоками, управляемые по сигналам, поступающим от блока обработки информации 28. Блок обработки информации 28 представляет собой стандартную ЭВМ с соответствующими блоками сопряжения для ввода и вывода информационных сигналов.
Блок определения координат 29 представляет собой бортовой лазерный локатор (или радиолокатор), определяющий координаты и параметры движения объекта: угловые координаты, скорость V0, дальность до объекта R. Параметры движения объекта определяют относительно первой заданной точки A1. Состав и принципы действия лазерных локаторов, аналогичных используемому в блоке определения координат, приведен в книге [4], глава 8, стр. 242 - 254.
Блок перемещения 25 выдвижной штанги 24 выполнен на основе, например, шагового электродвигателя с реечным механизмом, снабженного блоком управления, управляемым по сигналам, формируемым в блоке обработки информации 28. Фотоприемник 27 является стандартным полупроводниковым фотоприемником на рабочую длину волны λраб.
Комплекс, реализующий предложенный способ, содержит ряд элементов, обеспечивающих реализацию операций способа доставки излучения на объект.
Комплекс содержит блок ориентации 30, посредством которого обеспечивают необходимую ориентацию в пространстве платформы 16 КЛА. Ориентацию платформы 16 устанавливают таким образом, чтобы ось вращения O2 - O2 передающей телескопической системы 17, проходящая через фокус системы 17 и первую заданную точку A1, была направлена в сторону источника силового излучения 5 (к земле), а ось выдвижной штанги 24 была параллельной вектору скорости Vп платформы 16 относительно источника рабочего излучения 5. При такой ориентации платформы 16 КЛА радиальная составляющая скорости VR платформы относительно источника рабочего излучения близка к нулю, а тангенциальная составляющая скорости Vt является медленно меняющейся величиной.
Блок ориентации 30 содержит стандартные оптико-электронные средства и узлы для ориентации космических аппаратов в пространстве, например, на основе использования излучений Солнца, Луны и т.п., а также использования оптического датчика горизонта. Описание данных устройств ориентации КЛА приведено в [4].
Комплекс содержит блок координатной привязки 31, с помощью которого осуществляют непрерывную координатную привязку источника рабочего излучения 5 и подвижной платформы 16 КЛА. Как было отмечено, платформа 16 КЛА движется по космической орбите с известными параметрами движения на любой момент времени (Параметры движения заранее рассчитаны и измерены). Параметры движения платформы 16 КЛА на каждый фиксированный момент времени и с некоторым упреждением по времени поступают от системы внешнего целеуказания 32 и через блок связи 15, например, по радиоканалу поступают на борт платформы 16 в блок координатной привязки 31. Блок 31 содержит приемное устройство, например, радиодиапазона, которое осуществляет прием этой информации и передачу данных в блок обработки информации 28. В блок обработки информации 28 поступает следующая информация о параметрах движения платформы 16 КЛА:
1. Величина расстояния H(t) для любого момента времени от заданной точки A1 платформы 16 до источника рабочего излучения 5 - до точки O1 в центре поворотного зеркала 2. Данная точка O1 является точкой фиксирования координат источника рабочего излучения.
2. Величина тангенциальной составляющей Vt скорости платформы 16 относительно точки O1 поз.2 источника рабочего излучения. Причем, так как главной системой координат предлагаемого Комплекса является система координат относительно первой A1 заданной точки, связанной с фокусом телескопической системы 17, величина Vt определяет тангенциальную составляющую скорости источника рабочего излучения относительно первой заданной точки пространства A1 (платформы 16 КЛА).
Величины H(t) и Vt являются медленно меняющимися величинами, практически постоянными для небольших промежутков времени, в пределах которых осуществляют наведение излучения на объект. Блок информации 28 осуществляет определение величины расстояния Xп = A1 - A2 между первой и второй заданными точками на основании соотношения Xп = T•Vt. Для любого прогнозируемого момента времени t величину Xп определяют заранее и устанавливают с помощью выдвижной штанги 24 и блока перемещения 25 по сигналам управления, поступающим от блока обработки информации 28 в блок перемещения 25.
Блок координатной привязки 31 выполняет также вторую функцию по контролю правильности ориентации платформы 16 КЛА в пространстве. Блок координатной привязки 31 содержит приемную антенну (например, радиодиапазона), которая обеспечивает определение углового направления на источник излучения - блок связи 15, который одновременно с передачей информации выполняет и функцию радиомаяка. Блок связи 15 пространственно расположен в непосредственной близости от источника рабочего излучения 5 и определяет координаты расположения источника рабочего излучения. Приемная антенна блока координатной привязки 31 содержит, например, четырехплощадочную чувствительную систему и работает, например, по принципу определения направления равносигнальной зоны. С помощью блока привязки 31 определяют, таким образом, направление на блок связи 15, которое определяет направление от платформы 16 КЛА точки A1 в точку O1 поз. 2 на источник рабочего излучения. Эта информация в кодовой форме поступает от блока координатной привязки 31 в блок информации 28, куда одновременно поступает и информация от блока ориентации 30. При необходимости осуществляют корректировку ориентации платформы 16 КЛА по полученной информации от блока координатной привязки 31 и блока ориентации 30. Коррекцию ориентации платформы 16 КЛА осуществляют с помощью двигателей ориентации, которые на фиг. 1 не показаны.
Таким образом, в блок обработки информации 28 поступает вся необходимая информация для осуществления ориентации платформы 16 КЛА, установления расстояния между точками A2 и A1, а также для установления положения передающей телескопической системы 17 и второго поворотного зеркала 20 для направления рабочего излучения в упрежденную точку положения объекта на момент времени t3.
Следует отметить, что от системы внешнего целеуказания 32 на борт платформы 16 КЛА непрерывно поступает также информация о текущих и последующих координатах и параметрах движения по орбите объекта, на который необходимо доставить мощное излучение. По этой информации, поступающей также в блок обработки информации 28, осуществляют предварительное наведение в ожидаемую точку нахождения объекта бортового локатора блока определения координат 29 и наведение (предварительное) на объект поворотного зеркала 20 и телескопической системы 17. Последующим определением координат объекта в блоке 29 и определением координат объекта θ3 в точке A3 в момент t3 доставки мощного рабочего излучения на объект обеспечивают точное наведение мощного излучения на объект путем введения небольших поправок в положение поворотного зеркала 20 и телескопической системы 17 к моменту времени t2.
Наземная часть комплекса фиг. 1 содержит опорно-поворотное устройство 1 с приводом 3 на основе шаговых электрических двигателей, управляемых от блока управления 4 по сигналам управления, поступающим от системы внешнего целеуказания 32, по которым осуществляют наведение визирной оси O1 - O1 источника мощного рабочего излучения на платформу 16 КЛА.
В качестве источника рабочего излучения 5 использован оптический квантовый усилитель высокой мощности, работающий на длине волны λраб, например, фотодиссоционного типа, с блоком накачки 6, например, на основе импульсных ламп, возбуждаемых блоком конденсаторов по сигналам от блока синхронизации 14. Аналогично в качестве лазерного усилителя 8 и задающего генератора 12 использованы, например, фотодиссоционные лазеры на λраб с импульсными блоками накачки 9, 13, аналогичными блоку накачки 6. Лазерный усилитель 8 обеспечивает формирование вспомогательного излучения, совместно с задающим генератором 12. Накачку ЛУ 8 и ЗГ 12 осуществляют одновременно по сигналам с синхронизатора 14. В этот момент времени источник мощного рабочего излучения 5 находится в ненакаченном состоянии. Накачку источника 5 осуществляют к моменту прихода отраженного вспомогательного импульса излучения по сигналам от синхронизатора 14. К этому моменту времени осуществляют также накачку лазерного усилителя 8 для дополнительного усиления принимаемого отраженного импульсного сигнала. Фокус вогнутого зеркала 7 расположен внутри блока обращения волнового фронта 10, представляющего собой кювету с прозрачными окнами, заполненную, например, сероуглеродом. В результате концентрации высокой энергии в блоке ОВФ формируют мощное рабочее излучение с обращенным волновым фронтом, которое распространяется в обратном направлении и получает дополнительное усиление в ЛУ 8 и источнике 5 в обратном проходе и обеспечивает компенсацию неоднородностей при квантовом усилении и при прохождении по атмосферному каналу. Формирование мощного рабочего излучения с ОВФ происходит за время, значительно меньшее времени "замороженности" атмосферы. Задающий генератор 12 в формировании ОВФ не используют. При формировании с помощью ЗГ 12 исходного вспомогательного импульса излучения для подсвета платформы 16 плотность излучения, формируемого ЗГ 12 в блоке ОВФ, мала, нелинейные эффекты не возбуждаются и излучение от ЗГ 12 свободно проходит для дальнейшего усиления в ЛУ 8. Объектив 11 и вогнутое зеркало 7 образуют телескопическую систему для формирования вспомогательного излучения. Блок синхронизации 14 содержит стандартные импульсные электронные блоки для формирования управляющих сигналов, обеспечивающих запуск блоков накачки 6, 9, 13 в заданные моменты времени. От системы внешнего целеуказания 32 на блок синхронизации 14 поступает информация о дальности до платформы 16 КЛА.Н. В зависимости от величины дальности H в блоке синхронизации 14 вырабатывают сигнал T1, определяющий величину периода повторения запуска источников мощного рабочего излучения 5 и ЛУ 8, ЗГ 12. Период повторения T1 импульсов, излучаемых в сторону платформы 16, несколько превышает время T двукратного прохождения света от источника мощного рабочего излучения 5 до платформы 16 и обратно. Выбор и формирование величины периода повторения T1 импульсов накачки на основании величины H дальности до платформы 16 осуществляет в блоке синхронизации специальная стандартная логическая ячейка.
Блок обработки информации 28 содержит стандартную ЭВМ (бортовую), снабженную блоками ввода-вывода информации и таймером.
Блок связи 15 представляет собой стандартный передатчик информации, например, радиодиапазона.
Применение предлагаемого способа и комплекса для его осуществления в системах доставки мощного рабочего излучения на движущиеся объекты позволяет получить следующие результаты:
обеспечить увеличение плотности энергии излучения на объекте вследствие полной и точной компенсации атмосферных искажений при осуществлении ОВФ и осуществления наведения мощного излучения на движущийся объект из точки (области) фокусировки (концентрации) мощного излучения с обращенным волновым фронтом;
обеспечить повышение точности наведения мощного излучения на движущийся объект за счет формирования высоконаправленного мощного излучения и его наведения из локальной области пространства с высокой плотностью излучения и исключения дополнительных ошибок в параметрах диаграммы направленности мощного излучения, обусловленных атмосферной турбулентностью.
Проведенные на предприятии исследования экспериментального макета, реализующего предложенный способ, подтвердили получение новых технических результатов и повышение плотности энергии на объекте (мишени).
Источники информации
[1] . Арбатов А. Г. и др. Космическое оружие: дилемма безопасности/Под ред. Е.П.Велихова. - М.: Мир, 1986, с. 37, рис. 1.4.
[2] . Воронцов М.А, Шмальгаузен В.И. Принципы адаптивной оптики. - М.: Наука, 1985, с. 92, рис. 8.13.
[3] . Авторская заявка N 4537902/09 от 28.12.90 г. Положительное решение N 24 от 19.02.92, кл. G 01 S 17/00 (прототип).
[4] . Изнар А.Н. и др. Оптико-электронные приборы космических аппаратов. - М.: Машиностроение, 1972, гл. 6, с. 169.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191406C1 |
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2125279C1 |
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1991 |
|
RU2110079C1 |
| УСТРОЙСТВО ДЛЯ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 1990 |
|
RU2033629C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152056C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛАЗЕРНОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2183841C1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2343412C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО КОНТРОЛЯ ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА | 2012 |
|
RU2502647C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2105321C1 |
Изобретение относится к лазерной локации и связи, а также к системам доставки мощного излучения на воздушные и космические объекты. Достигаемым техническим результатом является увеличение плотности энергии излучения на объекте, повышение эффективности компенсации атмосферных искажений, повышение точности наведения мощного излучения на движущийся объект. Технический результат достигается тем, что в известном способе доставки излучения на движущийся объект, заключающемся в определении координат объекта  в момент времени to, формировании импульса вспомогательного излучения, приеме отраженного импульса вспомогательного излучения и формировании рабочего излучения посредством обращения волнового фронта отраженного импульса вспомогательного излучения, в момент времени to осуществляют определение дальности R(to) и скорости
в момент времени to, формировании импульса вспомогательного излучения, приеме отраженного импульса вспомогательного излучения и формировании рабочего излучения посредством обращения волнового фронта отраженного импульса вспомогательного излучения, в момент времени to осуществляют определение дальности R(to) и скорости  (to) объекта в системе координат, связанной с первой заданной точкой пространства A1, относительно которой осуществляют определение координат объекта
(to) объекта в системе координат, связанной с первой заданной точкой пространства A1, относительно которой осуществляют определение координат объекта  импульс вспомогательного излучения направляют во вторую заданную точку пространства A2, отраженный импульс вспомогательного излучения формируют путем отражения импульса вспомогательного излучения во второй заданной точке пространства A2, в момент времени t1 прохода импульса вспомогательного излучения во вторую заданную точку пространства A2, определяют расстояние H(t1) между второй заданной точкой пространства A2 и источником рабочего излучения, после формирования рабочего излучения осуществляют его наведение из первой заданной точки пространства A1 в момент времени t2 в точку A3 ожидаемого нахождения объекта с координатами
импульс вспомогательного излучения направляют во вторую заданную точку пространства A2, отраженный импульс вспомогательного излучения формируют путем отражения импульса вспомогательного излучения во второй заданной точке пространства A2, в момент времени t1 прохода импульса вспомогательного излучения во вторую заданную точку пространства A2, определяют расстояние H(t1) между второй заданной точкой пространства A2 и источником рабочего излучения, после формирования рабочего излучения осуществляют его наведение из первой заданной точки пространства A1 в момент времени t2 в точку A3 ожидаемого нахождения объекта с координатами  при этом расстояние между первой A1 и второй A2 заданными точками пространства равно Xп = Vt • T, где t2 = t1 + T,
при этом расстояние между первой A1 и второй A2 заданными точками пространства равно Xп = Vt • T, где t2 = t1 + T,  Vt - тангенциальная составляющая скорости источника рабочего излучения относительно первой заданной точки пространства A1. 2 с. и 1 з.п. ф-лы, 4 ил.
Vt - тангенциальная составляющая скорости источника рабочего излучения относительно первой заданной точки пространства A1. 2 с. и 1 з.п. ф-лы, 4 ил.
 в момент времени to, формировании импульса вспомогательного излучения, приема отраженного импульса вспомогательного излучения и формировании рабочего излучения посредством обращения волнового фронта отраженного импульса вспомогательного излучения, отличающийся тем, что в момент времени to осуществляют определение дальности R (to) и скорости
в момент времени to, формировании импульса вспомогательного излучения, приема отраженного импульса вспомогательного излучения и формировании рабочего излучения посредством обращения волнового фронта отраженного импульса вспомогательного излучения, отличающийся тем, что в момент времени to осуществляют определение дальности R (to) и скорости  объекта в системе координат, связанной с первой заданной точкой пространства А1, относительно которой осуществляют определение координат объекта
объекта в системе координат, связанной с первой заданной точкой пространства А1, относительно которой осуществляют определение координат объекта  импульс вспомогательного излучения направляют во вторую заданную точку пространства А2, отраженный импульс вспомогательного излучения формируют путем отражения импульса вспомогательного излучения во второй заданной точке пространства А2, в момент времени t1 прихода импульса вспомогательного излучения во вторую заданную точку пространства А2 определяют расстояние H(t1) между второй заданной точкой пространства A2 и источником рабочего излучения, после формирования рабочего излучения осуществляют его наведение из первой заданной точки пространства A1 в момент времени t2 в точку A3 ожидаемого нахождения объекта с координатами
импульс вспомогательного излучения направляют во вторую заданную точку пространства А2, отраженный импульс вспомогательного излучения формируют путем отражения импульса вспомогательного излучения во второй заданной точке пространства А2, в момент времени t1 прихода импульса вспомогательного излучения во вторую заданную точку пространства А2 определяют расстояние H(t1) между второй заданной точкой пространства A2 и источником рабочего излучения, после формирования рабочего излучения осуществляют его наведение из первой заданной точки пространства A1 в момент времени t2 в точку A3 ожидаемого нахождения объекта с координатами  при этом расстояние между первой A1 и второй A2 заданными точками пространства равно
при этом расстояние между первой A1 и второй A2 заданными точками пространства равно
где Vt - тангенциальная составляющая скорости источника рабочего излучения относительно первой заданной точки пространства A1;
с - скорость света. точки A3 ожидаемого нахождения объекта в момент времени t3 прихода на объект рабочего излучения определяют на основании системы уравнений
точки A3 ожидаемого нахождения объекта в момент времени t3 прихода на объект рабочего излучения определяют на основании системы уравнений
с - скорость света,
отсчет всех моментов времени осуществляют относительно начального момента to = 0; вектор координат точки A3 ожидаемого нахождения объекта в момент времени t3;
вектор координат точки A3 ожидаемого нахождения объекта в момент времени t3; вектор координат объекта в момент времени to;
вектор координат объекта в момент времени to; вектор скорости объекта в момент времени to;
вектор скорости объекта в момент времени to;
Ro(to) - дальность до объекта в момент времени to;
i - 1, 2, 3.
| УСТРОЙСТВО ДЛЯ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 1990 |
|
RU2033629C1 |
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1991 |
|
RU2042156C1 |
| DE 3425098 A1, 16.01.86 | |||
| СПОСОБ ВЫДЕЛЕНИЯ ЦЕРИЯ ИЗ НИТРАТНЫХ РАСТВОРОВ, СОДЕРЖАЩИХ СУММУ РЕДКОЗЕМЕЛЬНЫХ ЭЛЕМЕНТОВ | 2014 |
|
RU2563015C2 |
| СПОСОБ ПОДБОРА УСЛОВИЙ ЦВЕТНОЙ ПЕЧАТИ НА МНОГОСЛОЙНЫХ МАТЕРИАЛАХ | 0 |
|
SU167432A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ КОМПОНЕНТ НАПРЯЖЕННОСТИ ТРЕХМЕРНОГО ЛАПЛАСОВСКОГО ПОЛЯ | 0 |
|
SU329540A1 |
