Изобретение относится к транспортному машиностроению, преимущественно к производству внедорожных транспортных средств, и предназначено для использования в различных модификациях в качестве спасательного, экспедиционного, туристического транспорта, в том числе и в амфибийном варианте.
Известны транспортные устройства, называемые вездеходами и содержащие обитаемый отсек, двигатель, трансмиссию (механическую, электромеханическую, гидравлическую иди пневматическую) и движители, способные перемещаться по бездорожью. Вездеходные качества определяются проходимостью и устойчивостью. К первичным характеристикам вездеходов в настоящее время относят и экологичность, как меру воздействия на ландшафт и в целом на окружающую среду. Важны также живучесть конструкции, управляемость и обитаемость. По типу движителей различаются вездеходы колесные, колесно-гусеничные, гусеничные и шагающие.
Наиболее распространены колесные и гусеничные вездеходы. В них удается достигнуть приемлемых сочетаний проходимости, экологичности, живучести, управляемости и обитаемости за счет сложности механизмов подвески движителей многоколесного полноприводного шасси.
Компенсация возникающих в условиях бездорожья концентраций напряжений в узлах трансмиссии и подвесок движителей сопряжена с увеличением собственного веса машины, ухудшением живучести, проходимости и экологичности.
При изменении направления движения у многоколесных, гусеничных и колесно-гусеничных устройств несовпадение мгновенных центров обращения движителей приводит к дополнительному разрушающему воздействию на грунт и нагрузкам на конструкцию.
Возможности улучшения характеристик существующих конструкций вездеходов ограничены близостью фундаментальных пределов свойств систем - местность-машина, грунт-движитель, динамическая управляемость и устойчивость. Шагающие вездеходы можно рассматривать лишь в качестве отдаленной перспективы.
В то же время оптимальное соотношение числа степеней свободы и действующих связей в системе местность-машина соответствует двухколейному двухколесному, или, иначе, одноосному транспортному устройству. При этом у подобных конструкций существенно выше проходимость и управляемость и меньше воздействие на ландшафт.
Известен одноосный вездеход, содержащий ведущий мост с межосевым вариатором, кинематически связанным с полуосями, несущими колесные движители, несущее основание, на котором смонтирована кабина с органами управления, и в полости которого моторный отсек с двигателем, редуктором, трансмиссией привода межосевого вариатора и с механизмом отбора мощности [1]
Данное техническое решение принято в качестве прототипа.
Основным недостатком данного вездехода является то, что расположение центра тяжести примерно в зоне ведущего моста имеет место только в статическом положении машины. При движении вездехода некомпенсированный реактивный момент от двигателя или тормозного устройства опрокидывает вездеход вокруг оси вращения колес. Такое исполнение одноосного вездехода не позволяет ему в самостоятельном режиме осуществлять маневрирование или совершать перемещения без дополнительной опоры.
В связи с этим известный вездеход может использоваться исключительно с шарнирно присоединяемой секцией. Тогда реактивный момент от двигателя и тормозных устройств компенсируется перераспределением нагрузки между осями секций.
Но введение указанной секции не позволяет использовать преимущества одноосного варианта ни в части проходимости и экономичности, ни в части экологичности и сохранения грунта и почвы. При этом зона грузовой площадки самого вездехода не может быть использована для перевозки груза (из-за расположения узла шарнирного соединения).
Изменение направления движения вездехода осуществляется изменением угла между осями, при этом результирующие сил сцепления колес с грунтом перестают совпадать с плоскостями вращения колес, что проявляется разрушающими действиями на грунт.
Шарнирное соединение ограничивает повороты на склонах и маневрирование на скорости из-за плохой остойчивости в режиме поворота.
Настоящее изобретение направлено на решение технической задачи компенсации опрокидывающего реактивного момента на кабине одноосного транспортного средства без присоединения дополнительных опор.
Достигаемый при этом технический эффект заключается в повышении эксплуатационных свойств одноосного вездехода и расширении его функциональных возможностей с одновременным повышением проходимости и экологичности вследствие уменьшения воздействия на почвенный слой и ландшафт в целом.
Указанный технический эффект достигается тем, что в одноосном вездеходе, содержащем ведущий мост с межосевым вариатором, кинематически связанным с полуосями, несущими колесные движители, несущее основание, на котором смонтирована обитаемая кабина с органами управления и в полости которого - моторный отсек с двигателем, редуктором, трансмиссией привода межосевого вариатора, а так же механизм отбора мощности, несущее основание, на котором смонтирована кабина, выполнено отдельным от ведущего моста и снабжено опорными и направляющими плоскостями на своих продольных несущих балках, а на концах картера ведущего моста смонтированы опорные и направляющие ролики, расположенные на опорных и направляющих плоскостях основания для обеспечения возможности продольного перемещения последнего относительно ведущего моста с помощью специального привода, моторный отсек и кабина установлены по равные стороны от ведущего моста с формированием центра тяжести вездехода, в статическом положении расположенного под осью вращения колесных движителей, а специальный привод перемещения основания относительно ведущего моста выполнен в виде механизма отбора мощности, соединенного с исполнительным механизмом, входное звено которого связано с картером моста, а выходное с основанием для перемещения последнего относительно моста в ту сторону и с таким ускорением, чтобы возникающие в результате этого перемещения вращательные моменты на основании были направлены навстречу реактивному моменту от движителей.
Настоящее изобретение поясняется рисунком, на котором на четырех фигурах схематически изображен один из возможных вариантов компоновки элементов конструкции одноосного вездехода, который наглядно демонстрирует возможность достижения указанной совокупностью признаков требуемого технического эффекта.
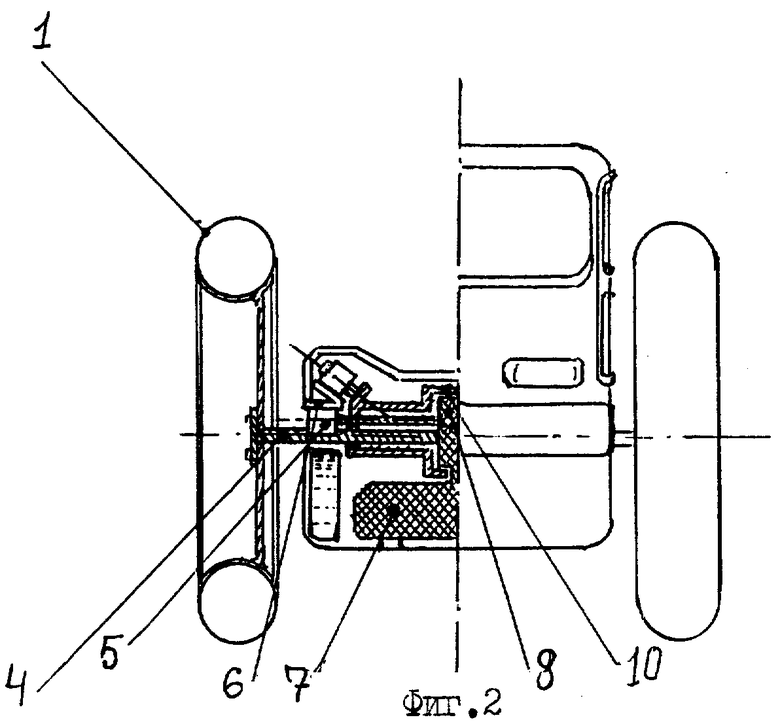
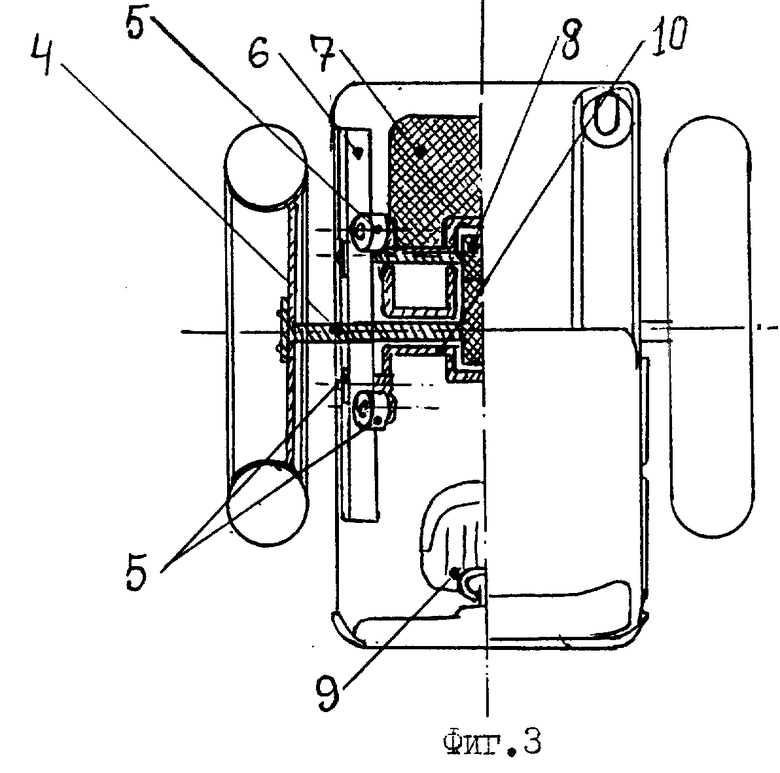
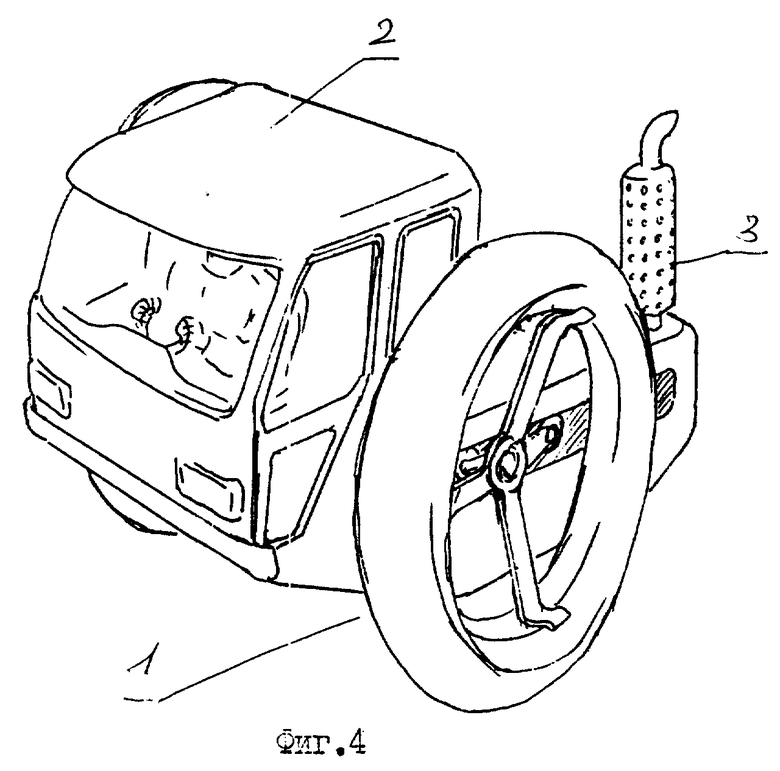
На фиг. 1 вид сбоку на одноосный вездеход. На фиг. 2 вид спереди на фиг. 1 с частичным поперечным разрезом по оси вращения колесных движителей. На фиг. 3 вид сверху на фиг. 1 с частичным продольным разрезом по оси вращения колесных движителей. На фиг. 4 одноосный вездеход в аксонометрическом изображении. Одноосный вездеход содержит:
1 колеса-движители; 2 основание и обитаемый отсек кабины; 3 - глушитель двигателя; 4 полуось колеса-движителя; 5 опорные и направляющие ролики; 6 опорные и направляющие плоскости несущей балки; 7 двигатель и трансмиссия; 8 механизм отбора мощности с исполнительным механизмом; 9 - кресло водителя; 10 картер балки ведущего моста.
Особенностью предлагаемой конструкции вездехода является выполнение основания машины с обитаемой кабиной и моторным отсеком отдельной от ведущего моста, с которым основание связано лишь кинематически и относительно которого оно может перемещаться под действием специального привода при изменениях моментов на движителях. Конкретная реализация механизма привода не является существенной, так как может быть использовано любое соответствующее типу трансмиссии известное устройство из категории механизмов по преобразованию движения.
Работает вездеход следующим образом. Развиваемый двигателем 7 момент передается трансмиссией (механической, электромеханической, гидравлической или пневматической) через межосевой вариатор на полуоси 4 и приводит в движение колеса движители. При этом реактивный момент начинает отклонять основание маятниковым образом относительно оси вращения колес движителей, а механизм отбора мощности 8, соответствующий типу трансмиссии (механический вариатор, гидро- или пневматический кран-регулятор или электрический мост-регулятор) передает приводу на картер ведущего моста часть сообщаемого межосевому вариатору момента и смещает основание относительно моста, что приводит к развитию действующих на основание моментов, направленных навстречу реактивному моменту, отклоняющему основание с кабиной и моторным отсеком. В результате маятниковое отклонение основания оказывается подавленным и основание принимает стационарное положение с некоторым смещением относительно оси колес-движителей и отклонением от горизонтального положения в соответствии с величиной и направлением момента, приложенного к колесам-движителям. При этом вся мощность двигателя направляется на преодоление сопротивления движению и ускорение вездехода.
Изменение направления движения вездехода осуществляется перераспределением с помощью органов управления моментов на плечах межосевого вариатора аналогично повороту на гусеничных транспортных средствах. При этом развиваемый двигателем момент создает в зоне контакта колес с грунтом силы, направленные строго перпендикулярно оси вращения колес, что минимизирует энергозатраты на поворот и воздействие движителей на грунт. Соответственно улучшаются проходимость и управляемость вездехода.
Замена колес на пневматические катки большого объема превращает вездеход в амфибию, способную смещением центра тяжести вездехода к центру приложения выталкивающей силы катков поддерживать устойчивость при значительном волнении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕРМОЛУЧЕВАЯ СИСТЕМА ОТОПЛЕНИЯ И ОБОГРЕВА | 1997 |
|
RU2159900C2 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| ВАРИАТОР ХАМУКОВА | 1999 |
|
RU2146022C1 |
| ДВУХКОЛЕЙНЫЙ ДВУХКОЛЕСНЫЙ ВЕЛОСИПЕД С ПЛАВАЮЩЕЙ КАБИНОЙ | 1995 |
|
RU2090429C1 |
| Робот-доставщик на одноосном шасси | 2021 |
|
RU2810208C2 |
| ОДНООСНОЕ САМОХОДНОЕ ИНВАЛИДНОЕ КРЕСЛО | 2009 |
|
RU2421202C2 |
| ПАРОВОДЯНОЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2003 |
|
RU2273757C2 |
| Агрегат для перемещения лежачих больных - больничный робот | 2018 |
|
RU2724824C2 |
| ШАССИ СНЕГОБОЛОТОХОДА | 2015 |
|
RU2599852C1 |
| Всесезонный тундроход | 2016 |
|
RU2628414C1 |
Использование: изобретение относится к транспортному машиностроению, преимущественно к производству внедорожных транспортных средств, и предназначено для использования в различных модификациях в качестве спасательного, экспедиционного, туристического транспорта, в том числе в амфибийном варианте. Сущность изобретения: одноосный вездеход с компенсированием реактивного момента на кабине содержит ведущий мост с колесами - движителями и несущее основание с кабиной с обитаемым и моторным отсеками. Основание опирается своими продольными несущими балками на опорные и направляющие ролики на концах балки моста, обитаемый отсек с органами управления установлен на несущих балках впереди колес-движителей, а моторный отсек с двигателем, трансмиссией и отдельным приводом к балке моста подвешен к несущим балкам позади колес-движителей так, что центр тяжести кабины располагается ниже оси колес-движителей, привод на балку моста смещает по опорным роликам основание относительно ведущего моста для создания вращательных моментов, компенсирующих реактивные моменты, отклоняющие кабину при движении. 4 ил.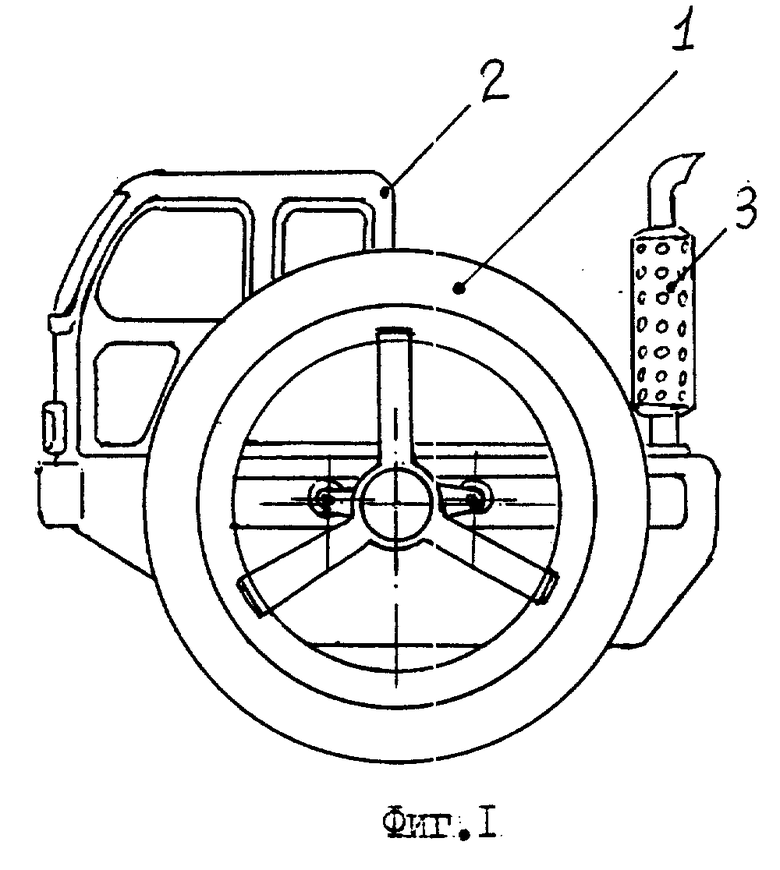
Одноосный вездеход, содержащий ведущий мост с межосевым вариатором, кинематически связанным с полуосями, несущими колесные движители, несущее основание, на котором смонтирована кабина с обитаемым отсеком с органами управления, в полости которого моторный отсек с двигателем, редуктором, трансмиссией привода межосевого вариатора, а также механизм отбора мощности, отличающийся тем, что несущее основание, на котором смонтирована кабина, выполнено отдельным от ведущего моста и снабжено опорными и направляющими плоскостями на своих продольных несущих балках, а на концах картера ведущего моста смонтированы опорные и направляющие ролики, расположенные на опорных и направляющих плоскостях основания для обеспечения возможности продольного перемещения последнего относительно ведущего моста с помощью отдельного привода, моторный отсек и кабина установлены на несущих балках основания по разные стороны от моста с формированием центра тяжести вездехода, в статическом положении расположенного под осью вращения колесных движителей, при этом привод перемещения основания относительно ведущего моста выполнен в виде механизма отбора мощности, соединенного с исполнительным механизмом, входное звено которого связано с картером ведущего моста, а выходное с основанием для перемещения последнего относительно ведущего моста.
| Антонов А.С | |||
| и др | |||
| Армейские автомобили | |||
| Конструкция и расчет | |||
| Ч | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - М.: МО СССР, 1970, с | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
