Изобретение робот-доставщик на одноосном шасси относится к роботостроению и предназначено для применения в качестве автономного робота-курьера в ритейле, в системах обслуживания и в иных сферах жизнедеятельности, связанных с транспортировкой малогабаритных посылок на последнем этапе доставки различных предметов обихода или жизнеобеспечения наземным способом.
Известны роботы-доставщики, представляющие собой самоходные автономные экипажи на статически уравновешенных или статически неуравновешенных колёсных шасси, оснащённые устройством/устройствами связи, дистанционного управления, системой/системами компьютерного зрения, системами навигации и позиционирования с лидаром или без него, источниками энергии и закрывающимся крышкой кузовом для размещения доставляемых объектов.
Существующие концепты роботов-доставщиков на шагающих или гусеничных шасси.
Недостатки существующих аналогов вследствие низких технико-эксплуатационных характеристик при высокой стоимости не могут составить конкуренцию роботам-доставщикам на колёсных шасси и не рассматриваются в качестве аналогов изобретению.
Известные роботы-доставщики на колёсных шасси имеют общий для всех недостаток, заключающийся в недостаточной подвижности, ограничивающей применимость роботов-доставщиков.
Недостаточная подвижность известных роботов-доставщиков обусловлена свойствами используемых шасси и проявляется в ограничениях управляемости, маневренности, проходимости и скорости перемещения роботов-доставщиков по местности со сложным микрорельефом. За исключением робота-доставщика REV-1, известные роботы-доставщики не способны преодолевать характерные для территорий городов препятствия типа «уступ» и лестницы со ступеньками, не способны перемещаться по заснеженным дорогам и по местности со слабосвязным грунтом.
Также, недостатком известных роботов-доставщиков, является низкая энергоэффективность из-за высокого сопротивления движению колёс малого радиуса и изменения направления движения бортовым поворотом. Бортовой поворот, также, не обеспечивает высокой управляемости и наблюдаемости управления, необходимых для управления движением робота в автономном движении. Указанные ограничения подвижности и управляемости известных роботов-доставщиков ограничивают их способность замещать людей-курьеров и, тем самым, снижают применимость.
Наиболее близким изобретению по совокупности технико-эксплуатационных и потребительских свойств является единственный известный робот-доставщик с удовлетворительной подвижностью REV-1, агрегатированный на трёхколёсном шасси [https://www.tadviser.ru/index.php/ Продукт:REV-1_(робот-доставщик)]. Повышенная по сравнению с другими известными роботами-доставщиками подвижность REV-1 обусловлена использованием колёс большого диаметра, которые за счёт большей опорной проходимости, чем у колёс малого диаметра, обеспечивают снижение сопротивлению движения, повышают курсовую устойчивость, способность перемещаться по снегу и развивать высокую – до 50 км/час – скорость. Также, в отличие от других известных роботов-доставщиков, робот-доставщик REV-1 обладает большей управляемостью и большей наблюдаемостью управления за счёт того, что меняет направление движения не бортовым поворотом, а с помощью поворота управляемых передних колёс.
Недостатками робота-доставщика REV-1 являются низкая поперечная и продольная остойчивости и низкая тяговооружённость при одном ведущем заднем колесе. Низкая поперечная остойчивость обусловлена тем, что шасси робота-доставщика трёхколёсное. Низкая продольная остойчивость обусловлена тем, что нижняя часть объёма корпуса робота-доставщика занята колёсными нишами передних поворотных колёс и конструкциями подвески заднего приведённого колеса. Вследствие этого, относительная высота расположения аккумуляторных батарей и оборудования робота-доставщика с кузовом для доставляемых объектов стала значительной, а вместе с ними и общая высота робота-доставщика оказались значительными, а центр масс робота-доставщика стал высокорасположенным. Соответственно, при экстренном торможении и/или при поворотах и при траверсировании уклонов или наезде на одностороннее препятствие у робота-доставщика REV-1 возникают значительные пикирующий продольный и опрокидывающий поперечный моменты при малой опорной базе трёхколёсного шасси. Тяговооружённость трёхколёсного робота-доставщика, определяемая относительным тяговым усилием одного приведённого заднего колеса, создающего направленную вдоль продольной оси робота-доставщика силу тяги, не может быть увеличена до величин, сопоставимых с силой тяжести робота-доставщика, так как при смещении центра масс экипажа к оси заднего ведущего колеса снижается поперечная остойчивость экипажа.
Задачей изобретения является повышение подвижности роботов-доставщиков.
Указанная задача решается агрегатированием робота-доставщика на статически уравновешенном двухколейном двухколёсном шасси с динамическим управлением остойчивостью. Такие шасси использованы в изобретениях, защищённых патентами № 2090429 «Двухколейный двухколесный велосипед с плавающей кабиной», № 2102272 «Одноосный Вездеход», № 2421202 «Робот-сапер», №2492620 «Сельскохозяйственный робот».
Статическую уравновешенность двухколейного двухколёсного (далее - одноосного) шасси обеспечивают использованием колес большого диаметра, что позволяет расположить центр масс конструкции робота-доставщика ниже геометрической оси колёс и придать конструкции свойства прямого составного физического маятника. Управление динамической остойчивостью одноосного робота-доставщика обеспечивают введением в конструкцию робота-доставщика дополнительной степени свободы в виде возможности продольных смещений кузова робота-доставщика относительно оси колёс под действием силы, направление и величина которой определяют знаком и величиной производной величины результирующего момента на колёсах. Для этого кузов снабжают направляющими, опирающимися на размещённые на перевёрнутой П-образной несущей раме конструкции робота-доставщика ролики или линейные подшипники, и приводом, управляемым указанной выше силомоментной связью с результирующим моментом на колёсах. Высокую тяговооружённость робота-доставщика обусловливает постоянная загрузка обоих ведущих колёс большого диаметра весом всей конструкции экипажа. Высокую маневренность одноосного робота-доставщика обусловливает способность поворачивать относительно геометрического центра проекции корпуса на грунт. Высокую проходимость одноосного робота-доставщика обусловливает большая опорная проходимость колёс большого диаметра и способность смещения центра масс относительно центра пятна контакта колёс с препятствием. Высокую энергоэффективность одноосного робота-доставщика обусловливает эффект «сглаживания» микрорельефа грунта на местности при качении колёс большого диаметра.
Для обеспечения способности перемещения по неровностям с высокой скоростью, одноосный робот-доставщик снабжают мягкой подвеской колёс к несущей раме посредством установленных на вертикальных стойках несущей рамы кареток с возможностью относительных перемещений на пружинном подвесе. Каретки кинематически связаны со стойками рамы ползунами или линейными подшипниками. Для обеспечения высокой поперечной остойчивости одноосного робота-доставщика каретки мягкой подвески колёс соединяют тросом поперечной остойчивости, снижающим боковые наклоны экипажа при наездах на односторонние препятствия и при движении по косогору. Для упрощения кинематической схемы конструкции одноосного робота-доставщика и придания ему способности перемещаться с высокими скоростями по ровным участкам и преодолевать уклоны и лестницы приводы колёс выполняют в виде установленных в колёса двух-или более скоростных редукторных мотор-колёс.
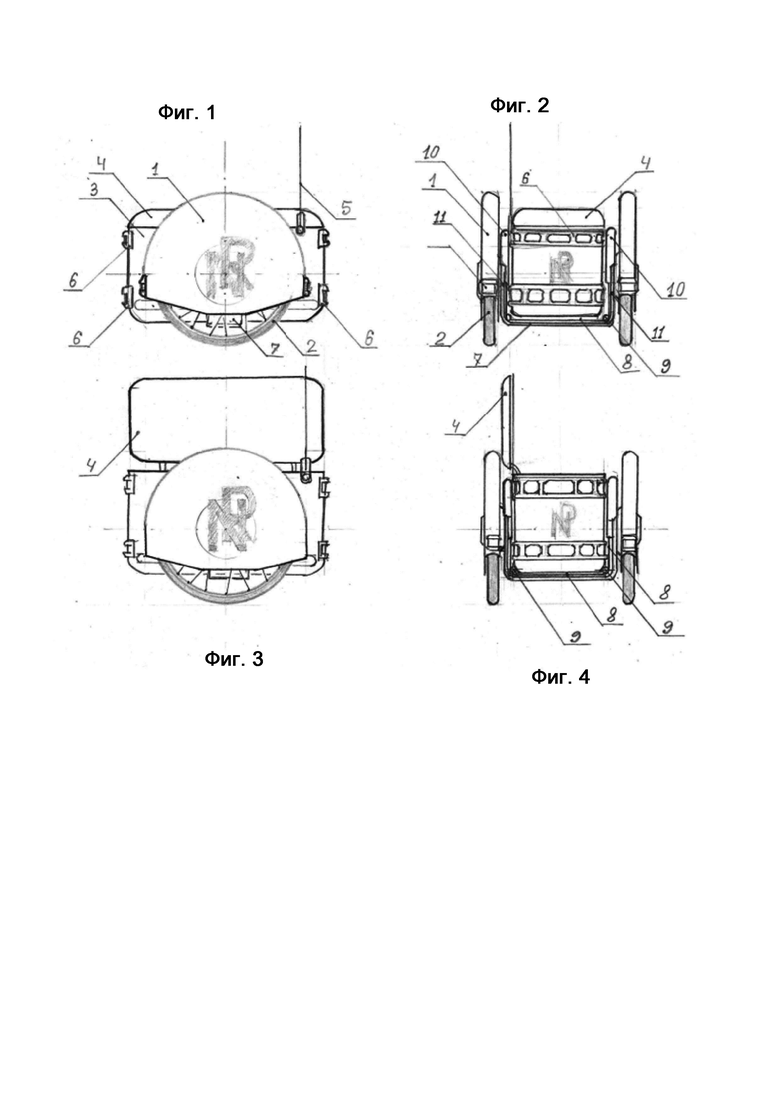
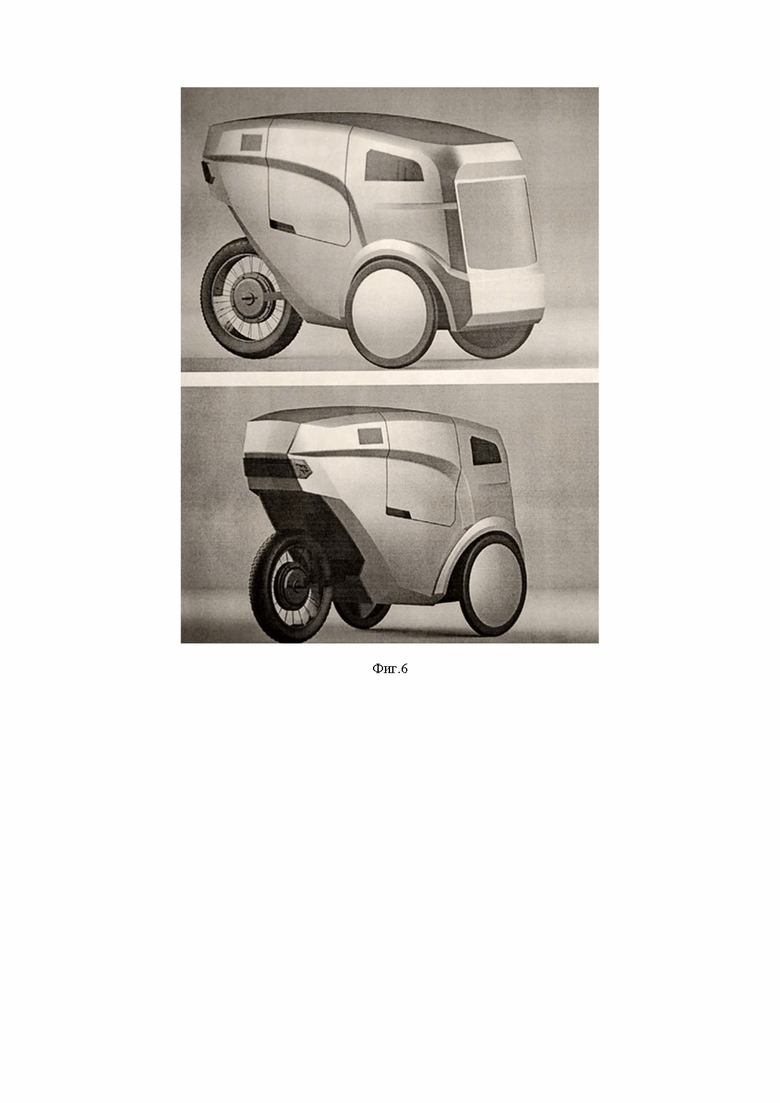
Возможный внешний вид нового робота-доставщика и робота-доставщика REV-1 представлены на Фиг 1, 2, 3, 4, 5, 6.
На фиг. 1 представлен примерный вид сбоку на одноосного робота-доставщика, где изображены возможный вид защитного крыла -1 колеса - 2, кузова - 3, крышки кузова - 4, антенны устройства связи – 5, бамперов с утопленными в них видеокамерами, лидаром, инфракрасными и ультразвуковыми датчиками и светотехникой – 6, несущей рамы - 7.
На фиг. 2 представлен возможный вид спереди одноосного робота-доставщика, схематически изображены несущая рама – 7, трос поперечной остойчивости - 8, блок троса поперечной остойчивости - 9, кареток мягкой подвески колёс – 10, стойки несушей рамы – 11.
На фиг. 3 и 4 изображены виды сбоку и спереди одноосного робота-доставщика с открытой крышкой кузова.
На фиг. 5 представлен вид одноосного робота-доставщика в процессе подъёма по лестнице.
На Фиг. 6 представлен внешний вид робота-доставщика REV-1.
В качестве маршевых колёс одноосного робота-доставщика используют любые известные колёса с соответствующим массогабаритам робота диаметром, в том числе спицевые колёса с пневматической шиной типа велосипедных. Кузов и несущую раму робота-доставщика изготавливают по известным технологиям из известных материалов, применяемых при изготовлении стойких к атмосферным воздействиям внешней среды изделий и агрегатов, в том числе из легкосплавных металлических, пластических и композитных материалов, а также из дерева или конструкционных материалов деревообработки. Для обеспечения оптимальных кинетостатических и динамических характеристик конструкции одноосного робота-доставщика при минимальных массогабаритных параметрах аккумуляторные батареи и преобразователи тока и напряжения располагают в нижней части кузова робота в отдельном отсеке с возможностью замены аккумуляторных батарей «нагорячую» посредством однонаправленного пространственного перемещения.
Бампера кузова изготавливают из ударопрочных эластичных материалов типа полиуретановых композитов.
Для обеспечения соответствия термическим и санитарно-гигиеническим требованиям при транспортировке продуктов питания при минимизации ухода и обслуживания кузов робота-доставщика выполняют со сменным вкладышем/вкладышами.
Технический результат - выполненный в такой компоновке одноосный робот-доставщик обладает совокупностью кинетостатических и динамических характеристик, придающих ему подвижность, сопоставимую с подвижностью человека-курьера. Соответственно, такой робот-доставщик будет способен замещать человека-курьера и осуществлять услуги по транспортировке малогабаритных посылок на последнем этапе доставки самых различных предметов обихода или жизнеобеспечения. Спрос на эти услуги формировался в течение и в настоящее время имеет долговременную тенденцию к росту.
| название | год | авторы | номер документа |
|---|---|---|---|
| Высокомобильный транспортный робот для перемещения палетированных грузов | 2022 |
|
RU2798652C1 |
| Высокоподвижный исследовательский планетоход | 2022 |
|
RU2780069C1 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| Мобильный робот-помощник | 2021 |
|
RU2810399C2 |
| Робототехнический комплекс для обеспечения общественной безопасности | 2020 |
|
RU2757747C1 |
| Робототехнический комплекс для безлюдного возведения строений/укрытий на Луне | 2020 |
|
RU2751836C1 |
| Агрегат для перемещения лежачих больных - больничный робот | 2018 |
|
RU2724824C2 |
| Способ корректировки локальных погодных условий и мезомасштабных синоптических ситуаций | 2022 |
|
RU2809317C1 |
| ОДНООСНОЕ САМОХОДНОЕ ИНВАЛИДНОЕ КРЕСЛО | 2009 |
|
RU2421202C2 |
| ОДНООСНЫЙ ВЕЗДЕХОД | 1995 |
|
RU2102272C1 |

Изобретение робот-доставщик на одноосном шасси относится к роботостроению и предназначено для доставки различных предметов обихода или жизнеобеспечения наземным способом. Робот-доставщик представляет собой автономный самоходный экипаж на колёсном шасси, оснащённый устройством связи, дистанционного управления, системой компьютерного зрения с видеокамерами и инфракрасными, ультразвуковыми и лазерными датчиками, системами навигации и позиционирования с лидаром или без него, источниками энергии и закрывающимся крышкой кузовом для размещения доставляемых объектов. При этом робот-доставщик агрегатирован на статически уравновешенном двухколейном двухколёсном шасси с перевёрнутой П-образной несущей рамой, кузов снабжён направляющими, опирающимися на размещённые на несущей раме конструкции робота-доставщика ролики или линейные подшипники с возможностью продольных смещений кузова робота-доставщика относительно оси колёс под действием привода, управляемого силомоментной связью с результирующим моментом на колёсах. Робот-доставщик способен перемещаться с высокими скоростями по ровным участкам и преодолевать уклоны и лестницы. 4 з.п. ф-лы, 6 ил.
1. Робот-доставщик, представляющий собой автономный самоходный экипаж на колёсном шасси, оснащённый устройством связи, дистанционного управления, системой компьютерного зрения с видеокамерами и инфракрасными, ультразвуковыми и лазерными датчиками, системами навигации и позиционирования с лидаром или без него, источниками энергии и закрывающимся крышкой кузовом для размещения доставляемых объектов, отличающийся тем, что робот-доставщик агрегатирован на статически уравновешенном двухколейном двухколёсном шасси с перевёрнутой П-образной несущей рамой, кузов снабжён направляющими, опирающимися на размещённые на несущей раме конструкции робота-доставщика ролики или линейные подшипники с возможностью продольных смещений кузова робота-доставщика относительно оси колёс под действием привода, управляемого силомоментной связью с результирующим моментом на колёсах.
2. Робот-доставщик по п.1, отличающийся тем, что колёса соединены с несущей рамой посредством кареток, кинематически связанных с вертикальными стойками рамы ползунами или линейными подшипниками и пружинами.
3. Робот-доставщик по п.2, отличающийся тем, что каретки мягкой подвески колёс соединены тросом.
4. Робот-доставщик по п.1, отличающийся тем, что в колёсах установлены двух- или более скоростные редукторные мотор-колёса.
5. Робот-доставщик по п.1, отличающийся тем, что кузов имеет съёмный вкладыш/вкладыши для размещения различных видов доставляемых объектов с различными термическими и санитарно-гигиеническими требованиями транспортировки.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| RoboNews | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| CN 0107041634 A, 15.08.2017 | |||
| WO 2019023704 A1, 31.01.2019 | |||
| 0 |
|
SU160103A1 | |
