Изобретение относится к области машиностроения, а именно к зубчато-рычажным передачам для преобразования вращательного движения в возвратно-поступательное и наоборот, и может быть использовано в двигателях внутреннего сгорания, а также в приводах рабочих органов станков.
В основу изобретения заложен принцип многозвенного механизма, выходное звено которого с периодически изменяемой скоростью в фиксированной точке на этом звене описывает траекторию в виде эпициклоиды. Основу предлагаемой конструкции при этом составляет зубчато-рычажный планетарный кривошипно-ползунный механизм в оригинальном сочетании с редуктором, также оригинального конструктивного решения.
В качестве аналогов предлагаемого устройства рассмотрим следующие механизмы:
1) Зубчато-кулисный планетарный механизм для воспроизведения циклоидных кривых предназначен для использования в приводах рабочих органов станков для обработки поверхностей циклоидального профиля (Авт.свид. СССР N 761770, F 16 H 21/14, 1980 г.). Механизм содержит центральное колесо, водило с установленным на нем сателлитом и кулису с камнем, шарнирно установленным на водиле, причем кулиса шарнирно соединена с сателлитом в точке, воспроизводящей заданную циклоиду. С помощью данного устройства воспроизводят перестраиваемую циклоиду, а для повышения жесткости механизма в него вводят кривошип.
2) Известен механизм для преобразования движения, предназначенный для получения сложных траекторий движения исполнительного органа (Авт. свид. СССР N 1236237, F 16 H 21/20, 1986 г.). Механизм содержит основной кривошипный вал с регулируемым радиусом, дополнительный кривошипный вал с регулируемым по величине радиусом кривошипа и синхронизирующую передачу, а также вспомогательный кривошип с регулируемым радиусом, установленный на основном кривошипном валу. Синхронизирующая передача выполнена, по крайней мере, из трех взаимно зацепляющихся цилиндрических зубчатых колес с параллельными осями, закрепленных по одному на соответствующих кривошипных валах. При этом синхронизирующая передача имеет регулируемое передаточное отношение. Данный механизм позволяет получить множество траекторий.
3) Известен импульсный механизм, в котором содержится два планетарных импульсатора, каждый из которых включает ведущее и ведомое звенья и связывающие их неуравновешенные сателлиты, и зубчатую передачу из трех конических колес с заторможенным водилом (Авт. свид. CCCР N 1698550, F 16 H 33/14, 1991 г.). Здесь боковые колеса зубчатой передачи жестко связаны с ведущими звеньями импульсаторов. Неуравновешенные сателлиты импульсаторов установлены в противофазе, а их ведомые звенья жестко связаны между собой. Механизм работает в импульсном режиме с помощью фазировки грузов, закрепленных на ведущих звеньях планетарных импульсаторов, и не пригоден для преобразования движения в одном направлении.
4) Известен зубчато-рычажный планетарный кривошипно-ползунный механизм, предназначенный для воспроизведения кривых (И.И. Артоболевский. Механизмы в современной технике. М. Наука, 1980 г. т.4, с. 118, рис. 2280). Механизм содержит пару входящих в зацепление зубчатых колес, одно из которых неподвижно, а другое подвижное, жестко связано со звеном, входящим во вращательную пару с шатуном, который затем входит во вращательную пару с ползуном, скользящим в неподвижной направляющей. При качении подвижного колеса по неподвижному колесу первое звено в точке соединения с шатуном описывает эпициклоиду начальной окружности неподвижного колеса. Различные законы движения ползуна могут быть осуществлены путем подбора соотношений между числами зубьев обоих колес, их радиусами и длиной первого звена.
5) Наиболее близким аналогом к заявляемому объекту является зубчато-рычажный планетарный механизм с периодически изменяемой скоростью выходного звена (И.И.Артоболевский. Механизмы в современной технике. М. Наука, 1980 г. т.4, с.153, рис. 2316).
В данном механизме входным звеном является водило, вращающееся вокруг неподвижной оси и входящее во вращательные пары с сателлитами, которые движутся по неподвижному зубчатому колесу. На осях сателлитов по другую сторону водила жестко укреплены рычаги, на концах которых вращаются ролики, центры которых описывают траектории в виде эпициклоиды при скольжении роликов в пазах диска, который они вращают со скоростью, периодически изменяющейся от нуля (когда центры роликов находятся на уровне зацепления сателлитов с центральным неподвижным колесом) до некоторого максимума (когда центры роликов находятся в точках, соответствующих максимальному расстоянию до неподвижной оси). Диаметры зубчатых колес приняты равными между собой. В этом случае период времени изменения скорости диска равен времени одного оборота входного звена вокруг неподвижной центральной оси.
Описанное устройство обеспечивает преобразование вращательного движения входного звена (водила) в возвратно-поступательное движение выходного звена (диска) и не дает обратного хода, т.е. преобразование возвратно-поступательного движения во вращательное. В таком виде его нельзя применить, например, в двигателях для циклической работы редуктора с шатунным механизмом. Однако, данный механизм принят за прототип заявляемого объекта, т.к. он наиболее близок ему по характеру соединения основных своих звеньев и по принципу действия, когда передача движения к выходному звену осуществляется по соответствующему закону путем создания движения планетарного механизма с получением эпициклоиды требуемого вида.
Задачей настоящего изобретения является создание устройства, обеспечивающего равномерную циклическую работу двигателя при значительном увеличении КПД за счет преобразования вращательного движения в возвратно-поступательное, и наоборот, по заданному закону.
Поставленная задача решается с помощью механизма для преобразования движения, включающего входное звено, связанное через неподвижный вал с передающим звеном в виде планетарного зубчатого механизма, состоящего из трех равных по диаметру цилиндрических шестерен, и выходное звено. В отличие от прототипа механизм содержит, по крайней мере, пару одинаковых выходных звеньев и соответствующее им количество передающих звеньев в виде идентичных планетарных зубчатых механизмов, а входное звено представляет собой редуктор, состоящий из конических шестерен, соединенных между собой под прямым углом, одна из которых центральная, а другие, боковые, количество которых соответствует количеству выходных звеньев и соответственно равно количеству передающих звеньев. Центральная шестерня редуктора жестко установлена на входном валу устройства, а другие, боковые, равные по диаметру между собой, установлены с возможностью вращения на одном неподвижном валу, на концах которого, отстоящих от боковых шестерен редуктора, жестко закреплены солнечные шестерни планетарных механизмов передающих звеньев, а их сателлиты установлены с возможностью вращения на валах, жестко закрепленных на внешних торцевых поверхностях боковых шестерен редуктора на расстоянии от оси неподвижного вала, равном диаметру сателлита. На внешней торцевой поверхности одного из сателлитов каждого передающего звена с эксцентриситетом жестко установлен палец, который шарнирно связан с выходным звеном, представляющим собой шатун с поршнем, а аналогичный узел на противоположном передающем звене установлен в противофазе.
Входной вал устройства выполняет также роль выходного. Центральная шестерня редуктора также является выходной, снимающей мощность со всего механизма и синхронизирующей его работу.
Определение эксцентриситета для установки пальца целесообразно из расчета 0,3 0,7 от радиуса сателлита. В этом случае палец описывает кардиоиду, проходя по которой в точке соединения с пальцем шатун на время прохождения по седловине кардиоиды задерживает поршень в верхней мертвой точке (ВМТ). Точнее, в этом случае поршень совершает минимальные перемещения, он как бы "зависает" на это время при непрерывном движении остальных звеньев механизма.
Предлагаемая конструкция позволяет заменить в двигателях коленчатый вал, который, как правило, является наиболее сложной в конструктивном отношении и наиболее напряженной деталью, воспринимающей периодические нагрузки от сил давления газов, сил инерции и их моментов. В двигателях с коленчатым валом угол опережения зажигания топлива является величиной переменной и зависит от угловой скорости коленчатого вала. В этих двигателях топливо начинает гореть, когда поршень еще не пришел в ВМТ, и двигатель через запасенную энергию в маховике, преодолевая сопротивление распирающихся газов, несет потери.
В предлагаемом изобретении "зависание" поршня дает возможность стабилизировать момент зажигания. Стабилизируется объем камеры сгорания при нахождении поршня в ВМТ, что приводит к возрастанию температуры и давления продуктов сгорания топлива. Больше топлива идет на полезную работу. В конечном итоге, соответственно повышается термический и экономический КПД. В свою очередь оригинальное решение конструкции изобретения, представленное симметричной механической конструкцией, обеспечивает ритмичную работу двигателя без дополнительных напряжений, что способствует уменьшению механических потерь.
Изобретение поясняется чертежами: фиг. 1, 2 и 3.
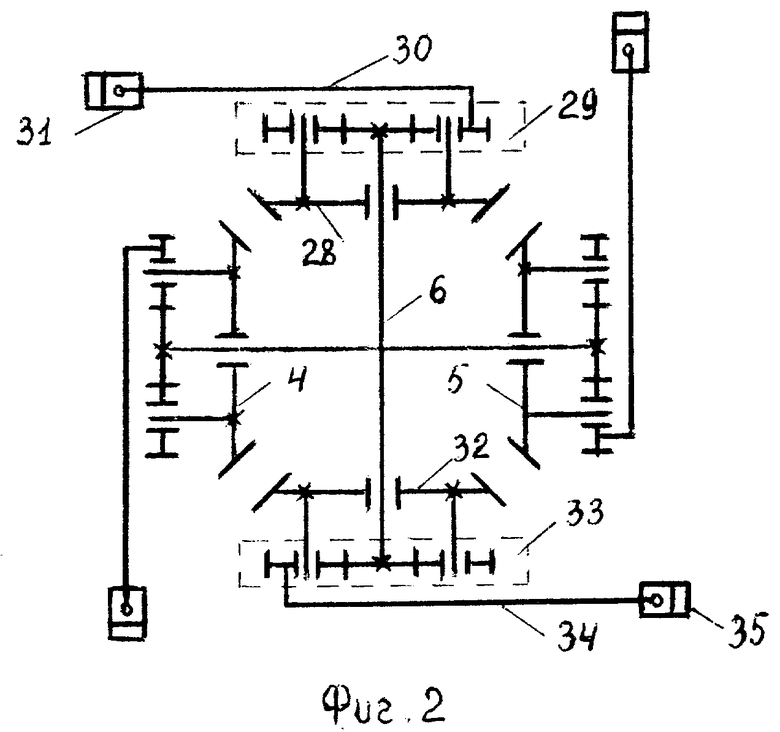
На фиг.1 представлена конструкция механизма для преобразования движения, включающего два передающих и два выходных звена, а входным звеном является редуктор 1, в котором на входном валу 2 жестко установлена коническая шестерня 3, входящая в зацепление под прямым углом с двумя другими, одинаковыми между собой коническими шестернями 4 и 5, которые с возможностью вращения установлены на одном неподвижном валу 6. Цифрами 7 и 8 обозначены передающие звенья планетарные механизмы, состоящие из трех равных по диаметру цилиндрических шестерен, при этом их солнечные шестерни 9 и 10 жестко закреплены по разные стороны от редуктора 1 на концах вала 6, которые выходят за пределы шестерен 4 и 5 и отстоят от них на некотором расстоянии, исключающем возможность вредного взаимодействия звеньев трения. Сателлиты 11 и 12 входят в зацепление с солнечной шестерней 9 и установлены с возможностью вращения на валах 13 и 14 соответственно, которые закреплены на внешней торцевой поверхности шестерни 4 на расстоянии от ее оси, равном ее диаметру или диаметру сателлита, как равном ему. С другой стороны редуктора аналогично звену 7 в зацепление с солнечной шестерней 10 входят сателлиты 15 и 16 звена 8, установленные с возможностью вращения соответственно на валах 17 и 18, также закрепленных на внешней торцевой поверхности шестерни 5, симметрично противоположному звену. На сателлитах 12 и 16 с внешней торцевой стороны укреплены пальцы 19 и 20 с эксцентриситетом относительно оси сателлита и в противофазе между собой. На пальцах 19 и 20 закрепляются с помощью шарниров выходные звенья конструкции шатуны 21 и 22 и сообщающиеся с ними соответственно поршни 23 и 24. Сателлиты 11 и 15 выполняют роль уравновешивающих шестерен планетарных механизмов 7 и 8. Шестерни 4, 5, 11, 12, 15 и 16, установленные с возможностью вращения на валах, для наглядности показаны в разрезе. Подвижность этих деталей обеспечивается, как правило, их установкой с помощью подшипников. На участки вала 6 между редуктором 1 и передающими звеньями 7 и 8, как правило, устанавливают разделительные ролики 25 и 26. Входной выходной вал 2 закреплен с помощью подшипников 27 в корпусе двигателя (на чертеже не обозначен).
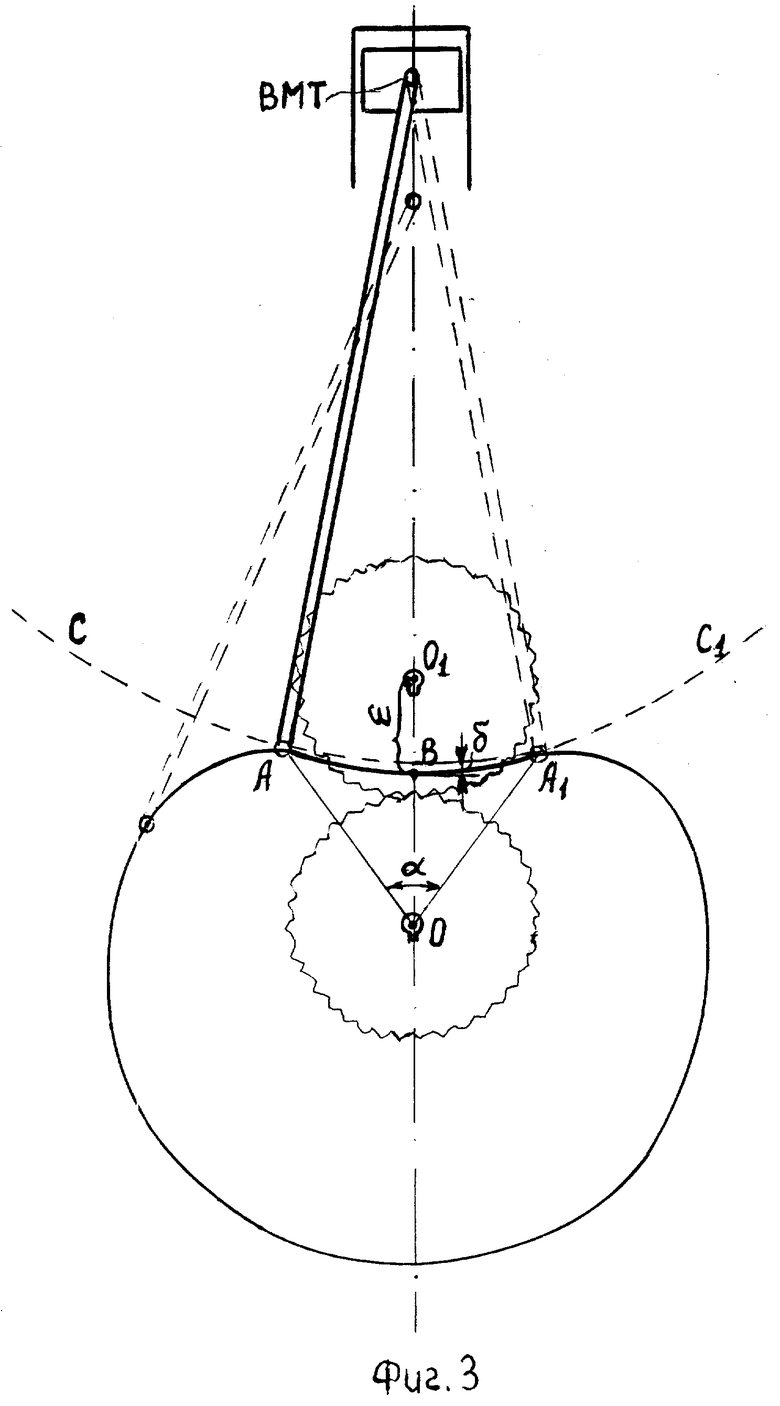
На фиг. 2 представлена кинематическая схема механизма в случае его исполнения с двумя парами передающих и соответственно выходных звеньев и четырьмя боковыми шестернями редуктора без отображения его центральной шестерни и входного вала. В таком варианте соединения элементов 28, 29, 30 и 31, а также 32, 33, 34 и 35 представляют соответственно вторую пару цепи: боковая шестерня редуктора передающее звено выходное звено, построенной аналогично варианту с одной парой (фиг.1). Только для соблюдения симметрии шестерни 28 и 32 устанавливаются на неподвижном валу 6 под прямым углом по отношению к установке шестерен 4 и 5, для чего вал 6 следует выполнить в виде прямого перекрестия.
На фиг. 3 изображена траектория движения пальца за полный оборот сателлита с пальцем вокруг солнечной шестерни. Точка О обозначает центр солнечной шестерни, а точка О1 центр сателлита. AA1 представляет дугу, образованную частью кардиоиды, передвигаясь по которой кривошип удерживает поршень в ВМТ "зависание" поршня. Точка Б обозначает точку установки пальца, эксцентриситет расположения которого от центра О1 сателлита 12 или 16 равен ε. Угол a, определяющий длину дуги AA1, увеличивается с увеличением e. Соответственно меняется величина d разница между реальным движением кривошипа по дуге кардиоиды AA1 и идеальной дугой для удержания поршня в ВМТ СС1.
Решением системы уравнений окружности и кардиоиды с заданным значением погрешности можно определить оптимальный угол "зависания" поршня, в котором его перемещение будет минимальным. Например, угол a 46o при диаметре сателлита 74 мм и эксцентриситете пальца e 22 мм, d ≈ 1 мм.
Устройство работает следующим образом. При запуске двигателя начинается вращение входного вала 2 редуктора 1. Установленная жестко на валу 2 коническая шестерня 3 вовлекает в противоположные вращения боковые шестерни 4 и 5 редуктора 1, которые установлены на неподвижном валу 6 с возможностью вращения на нем с помощью, например, радиально-упорных подшипников. Вращаясь вокруг вала 6, шестерни 4 и 5 через жестко закрепленные на них валы 13, 14, 17 и 18 вовлекают во вращение установленные на них сателлиты 11, 12, 15 и 16 соответственно. Сателлиты установлены на валах с помощью подшипников, например, радиально-упорных. Закрепленные на сателлитах 12 и 16 пальцы 19 и 20, шарнирно связанные с шатунами 21 и 22, описывают траектории в виде кардиоиды за один оборот сателлитов вокруг своих солнечных шестерен. Свободные сателлиты 11 и 15 выполняют при этом роль противовеса в уравновешивании сил инерции возвратно-поступательно движущихся масс. Пальцы 19 и 20 вовлекают в возвратно-поступательное движение шатуны 21 и 22, которые соответственно подведены к поршням 23 и 24, которые двигаются по своим направляющим в противофазе друг к другу. В однопарном варианте звеньев происходит работа 2-х цилиндрового двигателя. Мощность механизма в обратном порядке передается на редуктор и через его центральную шестерню 3 на входной вал 2, который уже играет также роль и выходного.
Симметрия конструкции обеспечивает равномерность нагрузок. "Зависание" поршней в ВМТ на максимально возможное время позволяет увеличить термический КПД. Увеличение количества пар звеньев позволит расширить функциональные возможности применения механизма в двигателях различной мощности и различных модификаций.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ ДВИЖЕНИЕ И НАОБОРОТ | 2005 |
|
RU2310115C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1990 |
|
RU2013606C1 |
| Гидромеханическая трансмиссия транспортного средства | 1988 |
|
SU1599251A2 |
| ШЕСТЕРЕННЫЙ БЕСШАТУННЫЙ МЕХАНИЗМ С МНОГОКОЛЕНЧАТЫМ ВАЛОМ | 2013 |
|
RU2537073C1 |
| СТАНОК-КАЧАЛКА | 2012 |
|
RU2506455C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| Гидромеханическая передача транспортного средства | 2018 |
|
RU2695471C1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| Планетарный механизм преобразования вращательного движения в возвратно-вращательное | 2016 |
|
RU2616457C1 |
| МУЛЬТИПЛИКАТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 2001 |
|
RU2202059C2 |
Использование механизма для преобразования движения в зубчато-рычажных передачах для преобразования вращательного движения в возвратно-поступательное и наоборот и может быть использовано в двигателях внутреннего сгорания, а также в приводах рабочих органов станков. Сущность изобретения состоит в том, что изобретение повышает КПД двигателя за счет многозвенной конструкции с применением преобразования движения при периодически изменяемой скорости выходного звена. Механизм содержит входное звено в виде редуктора из конических шестерен, центральная из которых закреплена на входном валу, а боковые, входящие с ней в зацепление под прямым углом, установлены на одном неподвижном валу с возможностью вращения. На концах вала, отстоящих от боковых шестерен редуктора, жестко установлены солнечные шестерни планетарных механизмов, являющихся передающими звеньями, сателлиты которых установлены с возможностью вращения на валах, жестко закрепленных на внешних торцевых поверхностях боковых шестерен редуктора на расстоянии от оси неподвижного вала, равном диаметру сателлита. На внешней торцевой поверхности одного из сателлитов каждого передающего звена установлены с эксцентриситетом палцы, шарнирно связанные с выходными звеньями в виде шатунов с поршнями. Пальцы на противоположных звеньях установлены в противофазе. 1 з.п.ф-лы, 3 ил.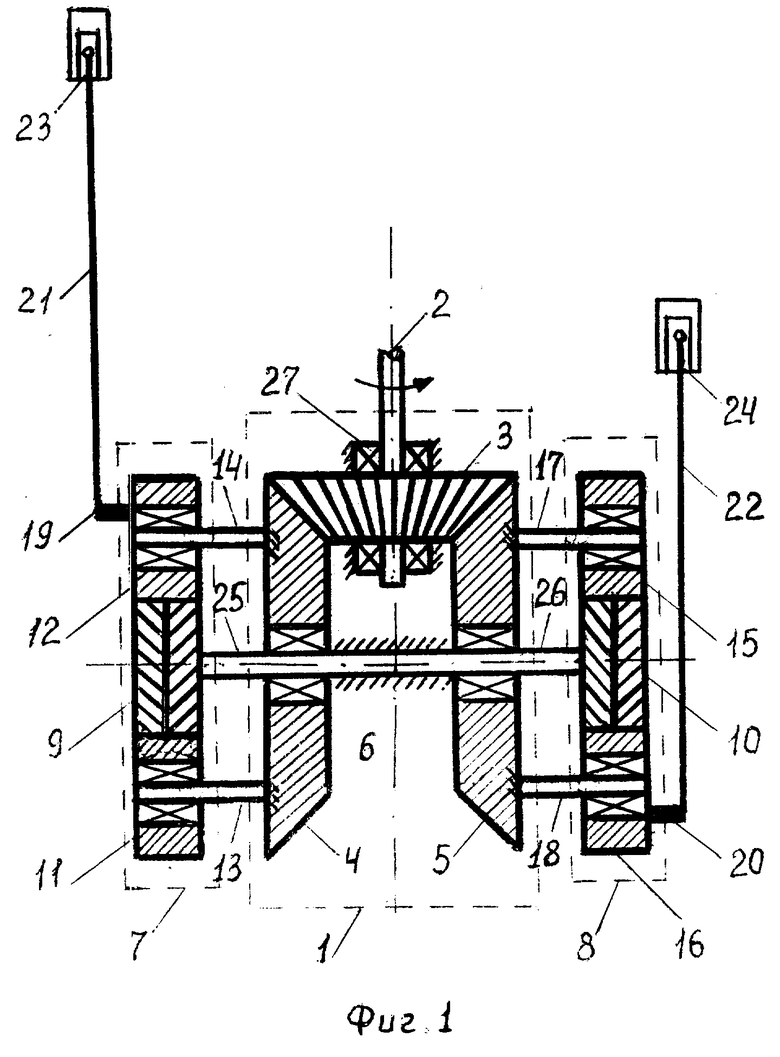
| Артоболевский И.И | |||
| Механизм в современной технике | |||
| - М.: Наука, 1980, т | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Паровозный золотник (байпас) | 1921 |
|
SU153A1 |
| Способ получения эритрена | 1923 |
|
SU2316A1 |
