Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах управления объектами с дискретным характером технологического цикла.
Цель изобретения - повышение точности устройства.
Сущность изобретения состоит в аппаратурной реализации контроля ситуационной динамики сложной технической системы, основанного на сохранении переходного инварианта.
Повышение качества контроля систевия реализовавшихся переходов 5. допустимым) может быть описано логическим выражением
I)(S; )Sr q(S;) D(Sj д(3; ). (2)
Данное условие может быть сформулировано следующим образом. Переход является недопустимым, если из ситуации S; при реализации команды управления R(S,) управляемая система перешла в такую ситуацию S,, что разряды кода ситуации D(S;), определяемые переходным инвариантом q(S;), изме


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ситуационного управления и контроля | 1987 |
|
SU1495818A1 |
| Устройство для контроля динамики управляемых процессов цифровых систем | 1987 |
|
SU1444827A1 |
| УСТРОЙСТВО ДЛЯ СИТУАЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ | 1992 |
|
RU2041494C1 |
| Устройство для комбинационно-логического управления сложными системами | 1987 |
|
SU1539775A1 |
| Устройство для контроля ситуационной динамики сложных технических объектов | 1987 |
|
SU1481799A1 |
| Устройство для контроля динамики сложных систем | 1986 |
|
SU1324038A1 |
| Устройство для ситуационного управления | 1985 |
|
SU1278811A1 |
| УСТРОЙСТВО ДЛЯ СИТУАЦИОННОГО УПРАВЛЕНИЯ | 1991 |
|
RU2102788C1 |
| Устройство для управления дискретными процессами | 1986 |
|
SU1399701A1 |
| Устройство для иерархического ситуационного управления | 1989 |
|
SU1725185A1 |
Изобретение относится к автоматике и вычислительной технике и мо/foff ситуации Кв9 жет быть использовано в системах управления объектами с дискретным характером технологического цикла. Цель изобретения - повыпение точности устройства. Сущность изобретения состоит в аппаратурной реализации контроля ситуационной динамики сложной технологической системы, основанного на сохранении переходного инварианта. Устройство содержит первый 1 и второй 2 регистры, первый 3, второй 4 и третий 5 блоки памяти, блоки 6 и 7 сравнения, блоки 8 и 9 элементов И, счетчик 10 адресов, генератор 1 1 тактовых импульсов и блок 12 уп- равления режимами. 1 з.п.-ф-лы, 3 ил. & (Л
мы объект - устройство управления мо- If нились. Нарушение этого условия свижет быть достигнуто в том случае, если устройство управления следит за адекватностью реакции объекта управления на вьфабатываемые управляющие воздействия (команды управления). 20 Характерной особенностью сложных технических систем как объектов управления является отсутствие детерминидетельствует о том, что система объект - устройство управления функционирует непредсказуемым образом и требуется вмешательство извне. Работа устройства управления при этом блокируется.
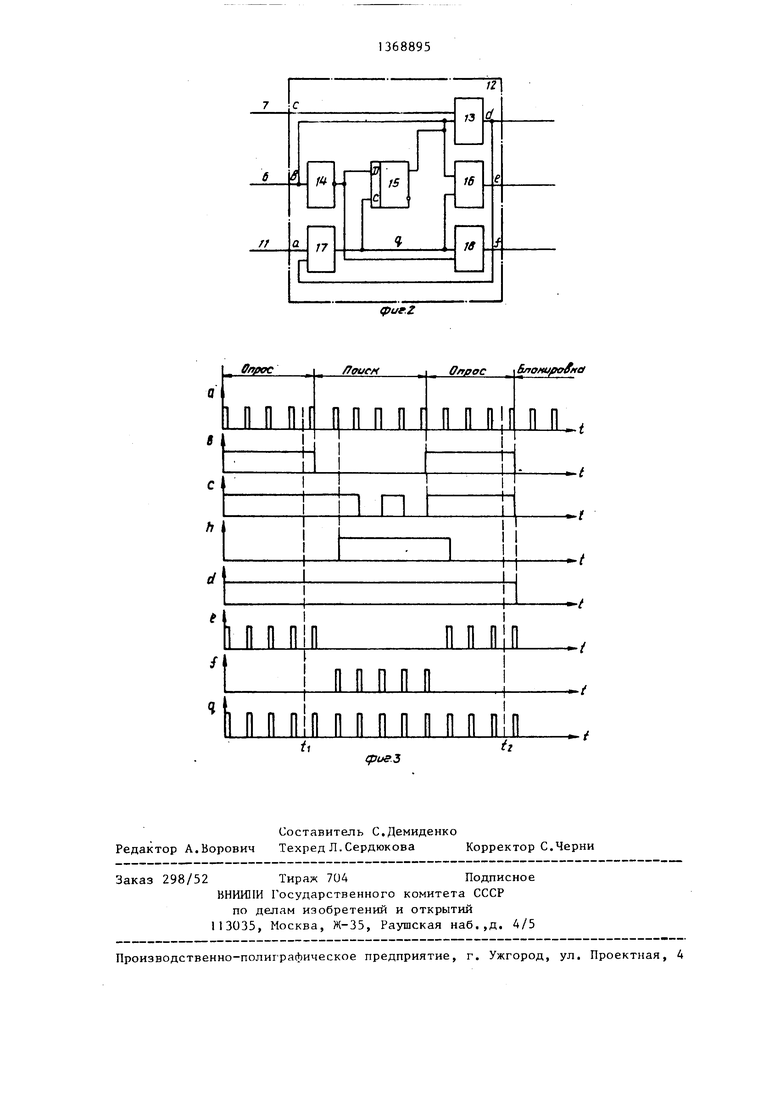
На фиг.1 изображена функциональная схема устройства для ситуационного контроля и управления; на фиг.2ситуация возникнет на следующем шаге, если в текущей ситуации S; заданрованной связи S;- R(S ; )- S, (ситуация - решение - ситуация)« Для та- 25 пример реализации блока управления ки х систем реакция носит недетерминиро- режимами; на фиг.З - временные диаг- ванный характер и определить, какая раммы работы блока управления режимами.
Устройство содержит первый 1 и ной своим набором двоичных признаков 30 второй 2 регистры, первый 3, второй (кодом ситуации D(S;) было приш .о 4 и третий 5 блоки памяти, первьй 6 решение R(S;) (реализована команда управления с кодом R(S,), можно лишь с точностью до некоторого подмножества P(S, ) всего множества ситуаций S Таким образом, множество P(S;)CS определяет множество допустимых переходов S;- S((S; )) пои второй 7 блоки сравнения, первый 8 и второй 9 блоки элементов И, счетчик 10 адресов, генератор 11 тактовых 35 импульсов и блок 12 управления режимами.
Блок I2 управления режимами содержит элемент ИЛИ 13, элемент
скольку связь (S;) является фик- ИЛИ-НЕ 14, D-триггер 15, первый 16, сированной. Для каждой ситуации S;€B 40 второй 17 и третий 18 элементы И. множество D(S;) может быть определено априорно на основании изучения
Устройство работает следующим образом.
свойств конкретного объекта управления.
Двоичный вектор (код ситуации) от объекта управления поступает на
Пусть Р (S;) P(S,)US;. Пвреход- 45 информационные входы регистра 1. В
ным инвариантом управляемой системь: в ситуации S назьшается двоичный вектор q(S;), определяемый в соответствии с выражением
q(S;) (g,D(S. ))V(&D(S.)); j -, 1
(l {j/Sj€ P (S, )} ). (1)
Вектор q(S) содержит единицы во всех тех разрядах, которые совпадают для всех векторов D(S; ) на Р (Si ).
Тогда условие корректности ситуационной динамики (условие соответстдетельствует о том, что система объект - устройство управления функционирует непредсказуемым образом и требуется вмешательство извне. Работа устройства управления при этом блокируется.
На фиг.1 изображена функциональная схема устройства для ситуационного контроля и управления; на фиг.2пример реализации блока управления режимами; на фиг.З - временные диаг- раммы работы блока управления режимами.
Устройство содержит первый 1 и 30 второй 2 регистры, первый 3, второй 4 и третий 5 блоки памяти, первьй 6
и второй 7 блоки сравнения, первый 8 и второй 9 блоки элементов И, счетчик 10 адресов, генератор 11 тактовых 35 импульсов и блок 12 управления режимами.
Блок I2 управления режимами содержит элемент ИЛИ 13, элемент
ИЛИ-НЕ 14, D-триггер 15, первый 16, второй 17 и третий 18 элементы И.
Устройство работает следующим образом.
Двоичный вектор (код ситуации) от объекта управления поступает на
момент окончания поиска предыдущей команды управления на выходе блока 6 появляется сигнал с уровнем логической 1. Одновременно такой же сигнал
50 появляется на выходе блока 7, поскольку коды ситуаций, поступающие в этот момент на входы блоков 8 и 9, совпадают. При этом блок 12 переводит устройство в режим опроса, Тое. нает пропускать импульсы от генератора 11 на синхровходы регистров 1 и 2. По заднему фронту каждого импульса происходит запись кода команды управления из блока 4 в регистр 2 и кода
текущей ситуации в регистр 1, Если код текущей ситуации, поступающий из регистра 1, совпадает с кодом ситуации, поступающим из блока 3 памяти, то на выходах блоков 6 и 7 по-прежнему продолжают оставаться сигналы с уровнем логической 1, и опрос продолжается.
При изменении кода текущей ситуации на выходе блока 6 появляется сигнал с уровнем логического О, поскольку коды ситуаций, поступающие на первые и вторые ее входы, ухе не совпадают. На элементах И блоков 8 и 9 при этом происходит логическое умножение двоичного вектора текущей ситуации S«,поступающего с регистра 1, и вектора предшествующей ситуации Si, поступающего из блока 3 на переходный инвариант q(R;), поступающий из третьего блока 5 памяти.
Если D(Sj&q(S; ) D{S; )gq(H; ),
ТО на выходе блока 7 продолжает оставаться сигнал с уровнем логической 1. При этом блок 12 переводит устройство в режим поиска, т.е. прекращает пропускать импульсы от генератора 11 на синхровходы регистров I и 2 и начинает пропускать их на счетньй вход счетчика 10. По заднему фронту очередного импульса его содержимое увеличивается на единицу, обеспечивая последовательную выборку информации из первого 3, второго 4 и третьего блоков памяти. При этом из блоков памяти выбираются вектора D(S,- ), R(S;) и q(S;) соответственно. Счетчик адресов работает циклически, обеспечивая последовательную выборку всех кодов ситуации D(S;) и всех векторов R(S;) и q(Sj). При совпадении вектора D(R;) с вектором текущей ситуации D(R,), хранящимся в регистре 1, на выходе блока 6 появляется сигнал с
|. Одновременно
уровнем логической сигнал с уровнем логической 1 формируется на выходе блока 7, и процесс повторяется.
Если же при смене кода текущей си- 50редного импульса на втором и третьем
туации на каком-либо щаге имеет мес-входах блока 12 одновременно появлято D(S )8q(S,(B; )&q(S, ), то на вы-ются сигналы с уровнем логического
ходе блока 7 также появляется сигнал О. При этом на выходе элемента 13
с уровнем логического О. При этомтакже формируется сигнал с уровнем
блок 12 переводит устройство в режим 55логического О, запирающий элемент
блокировки, т.е. вообще блокирует по-17. Подача импульсов от генератора И
дачу импульсов от генератора 1I. Вблокируется. Схема пребывает в таэтом случае на втором выходе блокаком состоянии неограниченно долго.
12 появляется сигнал с уровнем логи-При необходимости возобновить работу
ческого О, свидетельствующий о неадекватной реакции объекта управления в ситуации R; на управляющее воздей- ствие с кодом команды и R(S;), и дальнейщая работа устройства прекращается .
Клок 12 работает следующим образом.
В режиме опроса (фиГ.З) на второй и третий его входы поступают сигналы с уровнем логической I от блоков 6 и 7. D-триггер 15 в это время находится в нулевом состоянии. На выходе элемента 13 при этом формируется сигнал с уровнем логической 1, и им0
5
0
пульсы от генератора 11, поступающие на первый вход блока 12 через открытые элементы 16 и 18, поступают на третий выход - к синхровходам регистров I и 2.
Пусть в момент t, произошла допустимая смена текущей ситуации на входе устройства. Тогда после очередного импульса на втором входе блока 12 появляется сигнал с уровнем логического О, при этом схема переходит в режим поиска: запирается элемент 16, открывается элемент 18 и импульсы от генератора 11, поступающие на первый вход блока 12, через открытые элементы I7 и 18 поступают на третий выход блока к счетному входу счетчика 10. Очередным импульсом триггер
5 15 перебрасьшается в единичное состояние, обеспечивая постоянство единичного уровня сигнала на выходе элемента 13 в режиме поиска. После того, как из блока 3 памяти выбран код
0 ситуации, совпадаюпцш с текущей, на втором и третьем входах блока 12 по- . являются сигналы с уровнем логической 1 и схема опять переходит в режим опроса. При этом,очередным им5 пульсом триггер 15 перебрасьшается в нулевое состояние.
Пусть в момент tj произошпа недопустимая смена текущей ситуации на входе устройства, тогда после оче51368895
устройства следует принудительно перевести триггер 15 в единичное состояние.
Настройка предлагаемого устройства на реальную среду конкретного объекта управления осуществляется как в известном устройстве заданием для каждой конкретной ситуации В; , встречающейся в технологическом цикле объ- ю с выходами соответствующих элементов екта управления, своего кода команды И первого и второго блоков элементов управления R(S;), Однако, помимо И и с первым информационным входом этого, для каждой ситуации Sj опреде- блока управления режимами, у которо- ляется множество допустимых перехо- го второй информационный, тактирую- дов P(S;) и, в соответствии с вьфаже- щий входы, первый, второй и третий нием (1), вычисляется переходный инвариант q(S;). Вектора D(S;), R(S;), q(S;) заносятся в последовательные адреса соответственно первого 3, второго 4 и третьего 5 блоков памяти. 20 После этого устройство готово к работе.
командные выходы соединены соответственно с выходом первого блока сравнения, с выходом генератора тактовых импульсов, с контрольным выходом устройства, с синхровходами первого и второго регистров и со счетным входом счетчика адресов, входы установки первого, второго и третьего блоков памяти подключены к установочной шиФормула изобретения
25не устройства. 1. Устройство для ситуационного
контроля и управления, содержащее 2. Устройство по п. 1 , о т л и ч адва регистра. Два блока памяти, счет-ю щ е е с я тем, что блок управления
чик адресов, генератор тактовых им-режимами содержит элемент ИЛИ, элепульсоб и первый блок сравнения, сое- зомент ШШ-НЕ, три элемента И и D-триг35
гер, соединенный С-входом, единичным выходом и D-входом соответственно с выходом второго элемента И, с третьим входом элемента ИЛИ и с выходом элемента ИЛИ-НЕ, вход которого связан с вторым информационным входом блока и с вторым входом элемента ИЛИ, - первый вход и выход которого подключены соответственно к первому инфор- ды соединены с входами соответствую- до мзционному входу блока, и к первому щих разрядов второго регистра, выхо- командному выходу блока, объединеннодиненный первыми и вторыми входами соответственно с выходами соответствующих разрядов первого регистра и с соответствующими информационными выходами первого блока памяти, кодовый выход счетчика адресов подключен к кодовому входу первого блока памяти и к кодовому входу второго блока памяти, у которого информа1и1онные выходы разрядов которого являются командными выходами устройства, входы разрядов первого регистра соединены с входом кодов ситуации устройства, отличающееся тем, что,с целью повышения точности устройства, оно содержит два блока элементов И, второй блок сравнения, третий блок памяти и блок управления режимами, кодовый вход и информационные выходы третьего блока памяти подсоединены соответственно к кодовому выходу счетчика адресов и к соответствую6
щим первым входам первого и второго блоков элементов И, первые входы которых соединены соответственно с выходами соответствующих разрядов первого регистра и с соответствуюгцими информационными выходами первого блока памяти, первые, вторые входы и выход второго блока сравнения связаны
с выходами соответствующих элементов И первого и второго блоков элементов И и с первым информационным входом блока управления режимами, у которо- го второй информационный, тактирую- щий входы, первый, второй и третий
командные выходы соединены соответственно с выходом первого блока сравнения, с выходом генератора тактовых импульсов, с контрольным выходом устройства, с синхровходами первого и второго регистров и со счетным входом счетчика адресов, входы установки первого, второго и третьего блоков памяти подключены к установочной шиму с вторым входом второго элемента И, первый вход которого является тактирующим входом блока, первый, вто- рой входы и выход первого элемента И подключены соответственно к второму информационному входу блока, к выходу второго элемента Ник второму командному выходу блока, первый, второй входы и вькод третьего элемента И соединены соответственно с выходом второго элемента И, с выходом элемента ИЛИ-НЕ и с третьим командным вькодом блока.
| Стохастическая система управления | 1972 |
|
SU562795A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для дискретного управления | 1983 |
|
SU1089550A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
