Изобретение относится к медицинской технике, а конкретно к устройствам для регистрации силовых параметров пальцевых схватов.
Известны различные типы механодинамометров и тензодинамометров (авт.св. N 1688846, Лобзин В.С., Жулев Н.М., Пустозеров В.Г. Устройство для измерения мышечной силы; авт.св. N 1222244, Земляков В.В. с соавт. Реверсивный динамометр; авт.св. N 1715363, Ястребцев И.Б. Ручной динамометр; авт.св. N 984459, Воскресенский Е.В. Устройство для изменения параметров сгибательных движений пальцев; Edwards G. Isometric force measuring device, Palo Alto, Calif., Assignor to Greenleaf Medical Systems inc. Ser. N 581482).
Однако применение первых в медицинской практике ограничивается лишь регистрацией максимального силового воздействия. Нет возможности изучения силовых параметров пальцевых схватов во временном аспекте. Применение тензодинамометров позволило преодолеть данный недостаток, но конструкционно последние не адаптированы для изучения пальцевых схватов различных типов, особенно у пациентов с патологически измененными пальцами кистей.
Наиболее близким к предлагаемому техническому решению является прибор для измерения силы схвата, выбранный нами за прототип и описанный Букиным И. В., Якобсоном Я.С. в статье Приборы для измерения силы схвата и момента ротации кисти (Протезирование и протезостроение - Сб-к трудов. - вып. 43. - М.: 1977, с. 94 - 96).
Прибор состоит из корпуса, упругого и опорного элементов, измерительной системы. Корпус имеет две опоры, в пазах которых расположен упругий элемент в виде стальной пластины толщиной 0,8 мм, с обеих сторон которой наклеены четыре проволочных тензорезистора, собранных по схеме полумоста. Измеряемое усилие воспринимается опорным элементом, представляющим собой пластину с двумя штоками, способными свободно перемещаться вдоль направляющих отверстий и через шарик передается на упругий элемент.
Однако известное устройство конструкционно не обеспечивает возможность изучения силовых параметров пальцевых схватов в зависимости от величины схвата. Кроме того, прибор выполнен таким образом, что опорный элемент поджат к пластине с тензорезисторами с некоторым усилием с целью направления силы схвата вдоль осевой линии и уменьшения погрешности измерения. Несмотря на это, наличие постоянного фонового сигнала с тензорезисторов, а в конечном итоге необратимая деформация опорного элемента, возникающая от постоянного одностороннего силового воздействия, а также включение в передающую усилие систему шарика, играющего демпфирующую роль, обуславливает значительную величину ошибки измерения, что может привести к неправильному толкованию результатов динамометрических исследований пальцевых схватов в ортопедической практике.
Задача предлагаемого технического решения - повышение точности регистрации силовых параметров пальцевых схватов, расширение возможностей изучения различных типов схватов.
Поставленная задача достигается тем, что упругий элемент расположен в пазу трубчатого корпуса, имеющего шкалу контроля размера схвата и выполнен в виде консольной балки прямоугольного поперечного сечения с утолщениями на концах, одним из которых от фиксирован в корпусе, а к другому крепится неподвижная часть опорного элемента, противоупорная часть которого снабжена механизмом перемещения.
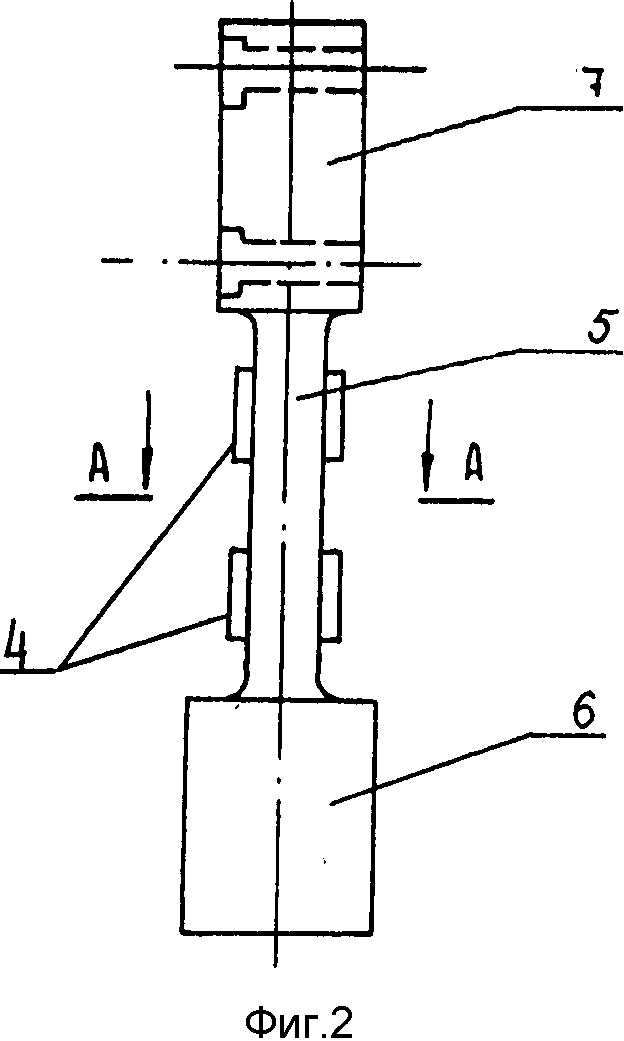
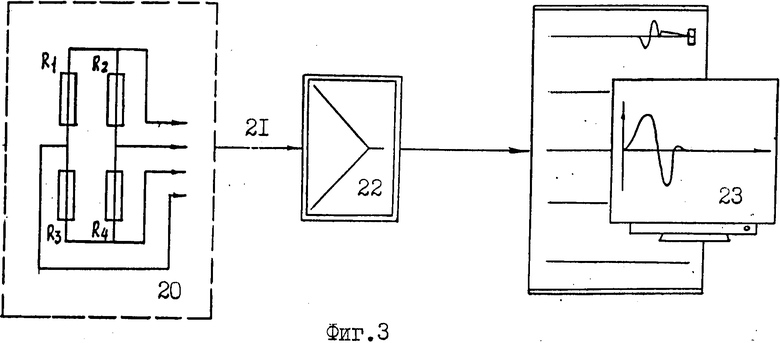
На фиг. 1 изображен динамометр общий вид; на фиг. 2 - упругий элемент; на фиг. 3 - схема включения динамометра в измерительную систему.
Динамометр (фиг. 1) состоит из корпуса 1, представляющего собой металлическую трубку с продольным пазом 2 и находящимся в нем упругим элементом 3, на котором с обеих сторон расположены четыре тензорезистора 4, собранные по схеме полумоста. Упругий элемент 3 (фиг. 2) выполнен в виде консольной балки 5 прямоугольного сечения с фиксирующим 6 и нагрузочным 7 цилиндрическими утолщениями на концах. К нагрузочному цилиндрическому утолщению упругого элемента 3 крепится винтами 8 неподвижная часть опорного элемента, выполненная в форме кольца 9, либо в форме полукольца 10. В пазу 2 размещен осевой винт 11, с помощью которого перемещается подвижная гайка 12, к которой винтами крепится противоупорная часть опорного элемента, выполненная так же, как и неподвижная его часть, в виде взаимозаменяемых кольца 14 или полукольца 15. Противоупорная часть опорного элемента снабжена механизмом перемещения в виде винта 11, снабженного регулировочной рукояткой 16, свободно вращающейся в муфте 17, неподвижно фиксированной в заглушке 18. На корпусе 1 имеется миллиметровая шкала 19 для контроля расстояния между кольцами 8 и 14 или полукольцами 9 и 15.
К полумостовой схеме 20 (фиг. 3) с помощью кабеля 21 подключена измерительная система, состоящая из усилителя 22 и регистрирующего устройства 23.
Динамометр работает следующим образом.
При отсутствии внешнего воздействия упругий элемент 3 интактен и тензорезисторами 4 сигнал не генерируется, о чем можно судить по регистрирующему устройству 23. При сжатии нагрузочных колец 8 и 14 или полуколец 9 и 15 в упругом элементе 3 возникают изгибные упругие деформации, преобразуемые тензорезисторами 4, в электрические сигналы, пропорциональные приложенному усилию. Сигнал с мостовой схемы по кабелю 21 поступает на усилитель 22 и регистрирующее устройство 23. Измерительная система работает как в режиме сжатия, так и в режиме разобщения нагрузочных колец 8 и 14, либо полуколец 9 и 15, что позволяет изучать силовые параметры мышц антагонистов. При помощи вращения рукоятки 16, вследствие вращения осевого винта 11 происходит перемещение подвижной гайки 12 с кольцом 14 или полукольцом 15 к или от неподвижного кольца 8 или полукольца 9 по пазу 2 с номинальным шагом хода 0,1 мм. Расстояние между кольцами контролируется по шкале 19, что позволяет установить определенный размер схвата данного типа.
Повышение чувствительности упругого элемента достигается за счет местных ослаблений вследствие выполнения его из цельнометаллического цилиндра с фрезевыми пазами по периметру, обеспечивающими прямоугольное поперечное сечение центральной консольной балки, несущей основные изгибные нагрузки. При достаточной чувствительности (0,0199 мВ/В Н, класс точности 1,5) и основной приведенной погрешности измерений менее 1,5% (при нормальной температуре и давлении) система обладает достаточной жесткостью, что позволяет изучать силовые параметры пальцевых схватов в режиме изометрического сокращения с допустимой перегрузкой в 150% при номинальном усилии в 200 Н.
Предлагаемое устройство позволяет регистрировать силовые параметры пальцевых схватов и адаптировано к различным типам схватов, что имеет первостепенное значение при оценке эффективности реабилитационных мероприятий, особенно у пациентов с патологически измененными пальцами кистей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМОМЕТР ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА КИСТИ | 1995 |
|
RU2108748C1 |
| ДИНАМОМЕТР КИСТЕВОЙ ТЕНЗОМЕТРИЧЕСКИЙ | 1996 |
|
RU2118508C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МЫШЕЧНОЙ СИЛЫ | 1999 |
|
RU2185098C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МЫШЕЧНОЙ СИЛЫ | 2002 |
|
RU2228138C1 |
| ДИНАМОМЕТР | 1998 |
|
RU2135081C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КИНЕМАТИЧЕСКИХ И СИЛОВЫХ ПАРАМЕТРОВ КИСТИ | 2013 |
|
RU2537783C2 |
| Тензодинамометр продольной силы | 1980 |
|
SU935719A1 |
| Динамометр для измерения сил резания | 1990 |
|
SU1732194A1 |
| Тензодинамометр продольного момента | 1986 |
|
SU1525500A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ МЫШЦ РАЗГИБАТЕЛЕЙ И СГИБАТЕЛЕЙ НИЖНЕЙ КОНЕЧНОСТИ | 2009 |
|
RU2423074C2 |
Использование: изобретение относится к медицинской технике, в частности к устройствам для регистрации силовых параметров пальцевых схватов кисти человека. Устройство содержит корпус с упругим элементом, на обеих сторонах которого расположены четыре тензорезистора, опорный элемент и измерительную систему. Корпус выполнен трубчатым со шкалой контроля размера схвата и имеет паз с вмонтированным в него упругим элементом в виде консольной балки, имеющей на концах утолщения, одним из которых он фиксирован в корпусе, а к другому крепится неподвижное кольцо или полукольцо опорного элемента. Противоупорное кольцо опорного элемента снабжено механизмом перемещения. 3 ил.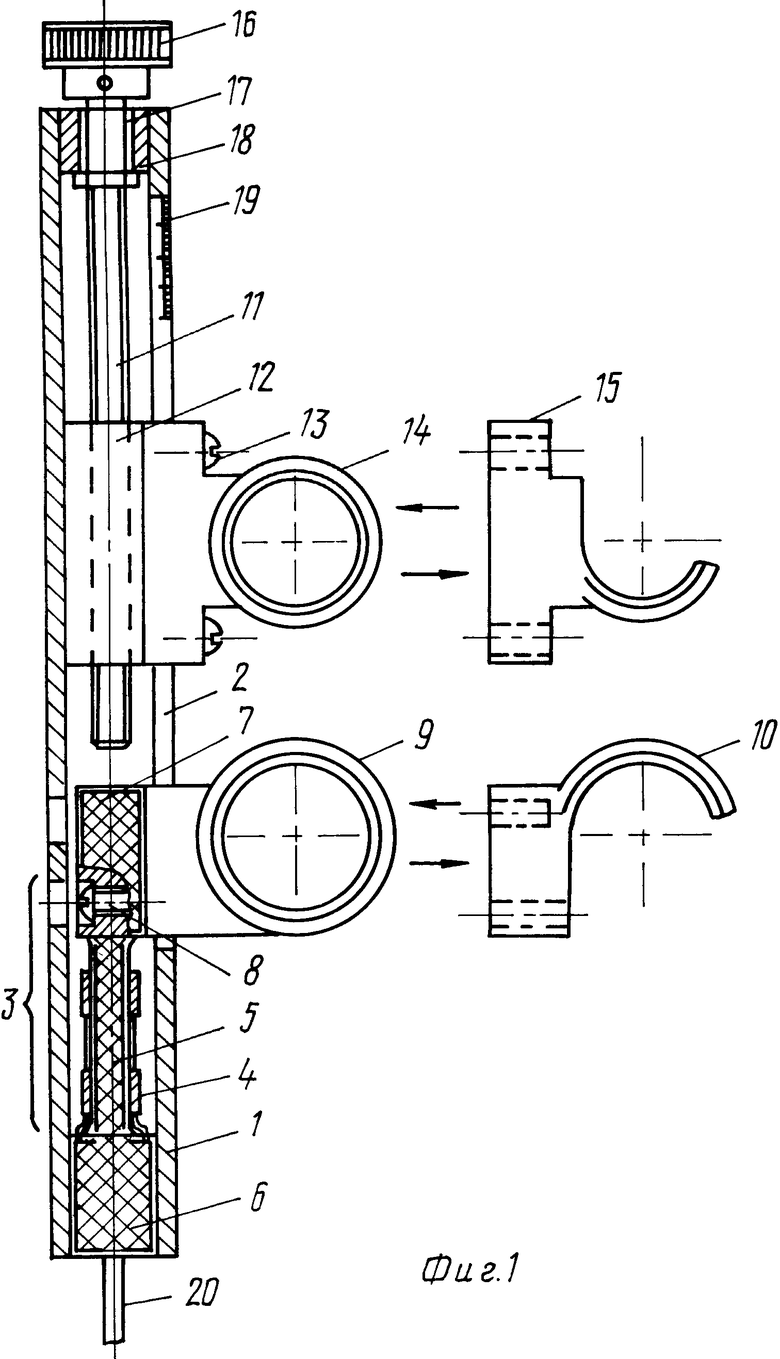
Динамометр, содержащий корпус, опорный элемент, упругий элемент с закрепленными на нем тензорезисторами и измерительную систему, отличающийся тем, что упругий элемент расположен в пазу трубчатого корпуса, имеющего шкалу для контроля размера схвата, и выполнен в виде консольной балки прямоугольного поперечного сечения с утолщениями на концах, одним из которых он фиксирован в корпусе, а к другому крепится неподвижная часть опорного элемента, противоупорная часть которого снабжена механизмом перемещения.
| Протезирование и протезостроение | |||
| Сборник трудов | |||
| - М., вып | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Экономайзер | 0 |
|
SU94A1 |
