Изобретение относится к медицине, а именно к устройствам для диагностики, и может быть использовано для функционального исследования в травматологии, ортопедии, хирургии, неврологии, спортивной медицине, в процессе реабилитации, для профотбора, исследований в физиологии труда, спорта, экспертиз трудоспособности, для оценки мышечной усталости, мышечной памяти, уровня мышечного тренда и нагружения подвижности суставов.
Известны различные устройства типа механодинамометров и тензодинамометров для измерения мышечной силы кисти («Устройство для измерения силы и выносливости мышц», Авторское свидетельство СССР №1426540, МПК А61В 5/22, 1988 г., «Реверсивный динамометр», Авторское свидетельство СССР №1222244, МПК А61В 5/10, 1986 г., «Ручной динамометр»; Авторское свидетельство СССР №1715363, МПК А61В 5/22, 1992 г., «Устройство для измерения мышечной силы», Авторское свидетельство СССР №1688846, МПК А61В 5/22, 1991 г., «Динамометр кистевой тензометрический» Патент на изобретение РФ №2118508 МПК А61В 5/22, 1998 г., «Динамометр для измерения силы схвата» Букин И.В., Якобсон Я.С. «Приборы для измерения силы схвата и мометна ротации кисти» Протезирование и протезостроение, - Сб. трудов. Вып. 3. М., 1977, с. 94-96).
Однако их применение в медицинской практике ограничивается регистрацией только максимального сигнала либо с одновременной регистрацией силы захвата во времени.
Вместе с тем известны различные типы устройств для динамометрии и динамографии мышц нижних конечностей с изменением угловых кинематических параметров. Так, «Устройство для динамометрии мышц сгибателей и разгибателей голени» (Патент на полезную модель РФ №74059, МПК А61В 5/11, 2008 г.) содержит шарнир, упоры и кресло, положение спинки которого изменяется и фиксируется под различными углами, длина сиденья кресла изменяется и фиксируется, мягкие валики располагаются под областью мыщелков бедра, срединно расположенный шарнир пошагово блокируется по дуге в 180°, а длина задних опор изменяется и фиксируется.
Основными недостатками устройства является дискретность угловой позы и динамографии.
Известно «Устройство для динамографии мышц сгибателей и разгибателей стопы» (Патент на изобретение РФ №2134063, МПК А61В 5/22, 1999 г.), содержащее раму на неподвижном основании, опорную площадку для стопы и динамометр. На неподвижном основании расположены планки для прижатия бедра, перемещающиеся по двум направляющим штангам. На основании также расположена опорная площадка для стопы, соединенная с рамой при помощи поворотного механизма, ось вращения которого совпадает с осью вращения голеностопного сустава при регулировке винтами, а динамометр закреплен на вращающейся рамке.
Недостатками указанного устройства являются отсутствие достоверной информации об угле наклона площадки и отсутствие возможности непрерывного измерения и регистрирования зависимости мышечной силы сгибателей и разгибателей стопы от угла поворота наклонной площадки, измерение усилия только относительно горизонтальной оси вращения голеностопного сустава.
Известно «Устройство для измерения силовых параметров кисти» (Патент на полезную модель РФ №31945, МПК А61В 5/22, 2003 г.), принятое за прототип, включающее опорный элемент, выполненный в виде двух полуцилиндрических траверс, диаметр которых может изменяться путем наложения и снятия сменных накладок, выполняемых в виде полых деревянных полуцилиндров, и упругий элемент с тензорезисторами, объединенными в две мостовые схемы, связанные с измерительной системой.
Недостатком указанного устройства является то, что оно не позволяет проводить измерения усилия захвата в зависимости от угла поворота кисти относительно трех ортогональных осей вращения. Отсутствие кинематических данных в виде зависимостей усилия захвата от углов поворота не позволяет в полной мере оценить функциональное состояние мышц.
Техническим результатом предлагаемого изобретения является расширение функциональных возможностей динамометрических измерений и повышение их точности.
Технический результат достигается тем, что устройство для измерения кинематических и силовых параметров кисти, включающее опорный элемент, выполненный в виде двух полуцилиндрических траверс, диаметр которых может изменяться путем наложения и снятия сменных накладок, выполняемых в виде полых деревянных полуцилиндров, и содержащий датчик силы, выполненный в виде упругого элемента с тензорезисторами, объединенными в две мостовые схемы, связанные с измерительной системой, содержит основание с закрепленными узлом фиксации локтевого сустава и узлом измерения, включающим вертикальную раму, установленную шарнирно с возможностью вращения относительно вертикальной оси, шарнирно соединенную с горизонтальной рамой, установленной с возможностью вращения относительно продольной оси, снабженной противовесами и осью для крепления рабочей рамы кистевого захвата с опорным элементом, установленной с возможностью вращения относительно горизонтальной оси, при этом каждая рама снабжена датчиком угла поворота, а измерительная система содержит блок управления.
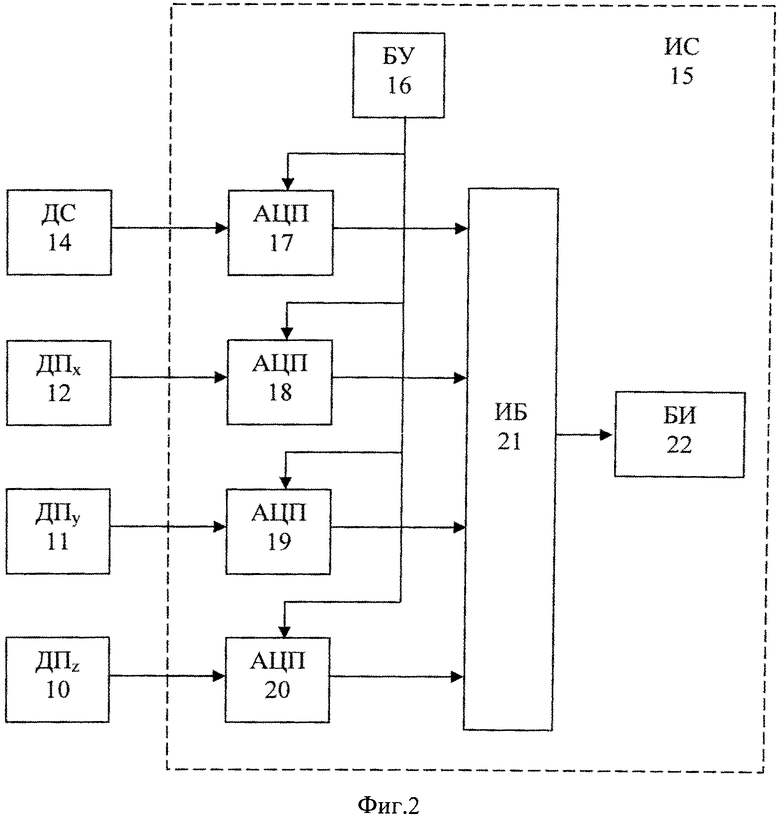
На фиг. 1 приведено устройство для измерения кинематических и силовых параметров кисти, на фиг. 2 приведена структурная схема измерительной системы.
Устройство для измерения кинематических и силовых параметров кисти содержит основание 1, на котором установлен узел фиксации локтевого сустава, состоящий из регулируемой по высоте стойки 2 и опорной площадки 3 с закрепленным на ней ложементом 4, и измерительный узел, позволяющий осуществлять вращательное движение кисти последовательно относительно трех координатных осей: x, y и z. Измерительный узел включает вертикальную раму 5, установленную на основании с возможностью вращения, горизонтальную раму 6, шарнирно соединенную с вертикальной рамой 5, в которой установлена ось 9 с рабочей рамой кистевого захвата 7. На рабочей раме кистевого захвата 7 установлен опорный элемент 8, который выполнен в виде двух полуцилиндрических траверс, диаметр которых может изменяться путем наложения и снятия сменных накладок, выполненных в виде полых деревянных полуцилиндров, и содержит встроенный датчик силы 14 на базе тензометрического моста. Горизонтальная рама 6 снабжена регулируемыми грузами противовесами 13, которые предназначены для компенсации веса горизонтальной рамы 6 и рабочей рамы кистевого захвата 7 с опорным элементом 8. Положение опорного элемента 8 вдоль продольной оси может регулироваться и фиксироваться посредством крепления оси 9. В каждой раме установлены датчики угла поворота кисти резистивного типа: в вертикальной раме 5 установлен датчик угла поворота относительно вертикальной оси z 10, в горизонтальной раме 6 установлен датчик угла поворота относительно горизонтальной оси y 11, и в рабочей раме кистевого захвата 7 установлен датчик угла поворота относительно продольной оси x 12.
Таким образом, устройство позволяет при фиксированном локтевом суставе совершать вращательное движение кисти последовательно относительно всех трех координатных осей.
На фиг. 2 приведена структурная схема измерительной системы, содержащая датчик силы 14, датчики угла поворота: датчик угла поворота относительно вертикальной оси x 12, датчик угла поворота относительно горизонтальной оси y 11 и датчик угла поворота относительно продольной оси z 10, измерительную систему 15, содержащую блок управления 16, аналого-цифровые преобразователи 17, 18, 19, 20, интерфейсный блок 21 и блок индикации 22. Измерительная система 15 включает в себя аналого-цифровые преобразователи 17, 18, 19, 20, подключенные к датчикам угла поворота и датчику силы: вход аналого-цифрового преобразователя 17 соединен с датчиком силы 14, вход аналого-цифрового преобразователя 18 соединен с датчиком угла поворота относительно вертикальной оси x 12, вход аналого-цифрового преобразователя 19 соединен с датчиком угла поворота относительно горизонтальной оси y 11, вход аналого-цифрового преобразователя 20 соединен с датчиком угла поворота относительно продольной оси z 10. Входы запуска аналого-цифровых преобразователей 17, 18, 19, 20 подключены к выходу блока управления 16. Выходы аналого-цифровых преобразователей 17, 18, 19, 20 подключены к интерфейсному блоку 21, который соединен с блоком индикации 22.
Устройство для измерения кинематических и силовых параметров кисти работает следующим образом. В процессе одного цикла измерений пациент сжимает опорный элемент 8 с определенным диаметром двух сменных накладок и совершает заданные пространственные формы движения кисти. При этом сигналы с датчиков 10, 11, 12, 14 поступают на аналого-цифровые преобразователи 17, 18, 19, 20: на вход аналого-цифрового преобразователя 17 поступает сигнал с датчика силы 14, на вход аналого-цифрового преобразователя 18 поступает сигнал с датчика угла поворота относительно вертикальной оси x 12, на вход аналого-цифрового преобразователя 19 поступает сигнал с датчика угла поворота относительно горизонтальной оси y 11, на вход аналого-цифрового преобразователя 20 поступает сигнал с датчика угла поворота относительно продольной оси z 10. Блок управления 16, выполненный на базе таймера, периодически синхронно запускает аналого-цифровые преобразователи 17, 18, 19, 20. Результаты измерения с помощью интерфейсного блока 21 преобразуются к формату стандартного интерфейса и поступают на блок индикации 22, выполненный на базе персонального компьютера, и выводится на экран в виде графических зависимостей сила-угол поворота.
Таким образом, предлагаемое устройство для измерения кинематических и силовых параметров кисти обеспечивает объективную оценку функционального состояния кисти в динамике и позволяет проводить исследования при непрерывно изменяющихся угловых поворотах кисти последовательно относительно трех ортогональных осей вращения, а значит, обеспечивает расширение функциональных возможностей динамометрических измерений и повышение их точности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ТОЛКАТЕЛЕЙ ЯДРА | 2006 |
|
RU2318569C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ МЫШЦ РАЗГИБАТЕЛЕЙ И СГИБАТЕЛЕЙ НИЖНЕЙ КОНЕЧНОСТИ | 2009 |
|
RU2423074C2 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Устройство для измерения мышечной силы | 1989 |
|
SU1688846A1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ УСИЛИЯ СЖАТИЯ КИСТИ | 2002 |
|
RU2218086C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ | 2010 |
|
RU2424025C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Устройство для измерений силы мышц и амплитуды движений руки человека | 1983 |
|
SU1175433A1 |
Изобретение относится к медицинской технике. Устройство для измерения кинематических и силовых параметров кисти включает опорный элемент (8), выполненный в виде двух полуцилиндрических траверс и содержащий датчик силы (14). Диаметр траверс может изменяться путем наложения и снятия сменных накладок, выполняемых в виде полых деревянных полуцилиндров. Датчик силы (14) выполнен в виде упругого элемента с тензорезисторами, объединенными в две мостовые схемы, связанные с измерительной системой. Устройство содержит основание (1) с закрепленными узлом фиксации локтевого сустава и узлом измерения. Узел измерения включает вертикальную раму (5), установленную шарнирно с возможность вращения относительно вертикальной оси, шарнирно соединенную с горизонтальной рамой (6), установленной с возможностью вращения относительно продольной оси, снабженной противовесами (13) и осью (9) для крепления рабочей рамы (7) кистевого захвата с опорным элементом (8), установленной с возможностью вращения относительно горизонтальной оси. Каждая рама снабжена датчиком угла поворота (10-12). Измерительная система содержит блок управления. Применение изобретения позволит расширить функциональные возможности динамометрических измерений и повысить их точность. 2 ил.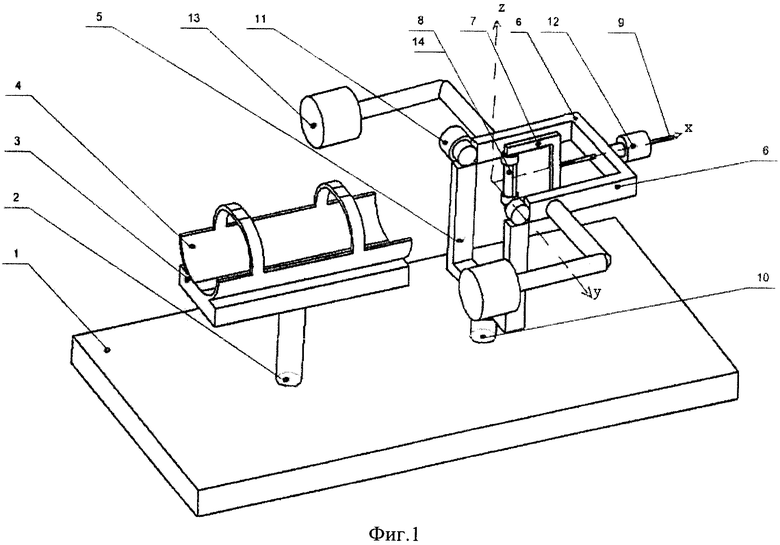
Устройство для измерения кинематических и силовых параметров кисти, включающее опорный элемент, выполненный в виде двух полуцилиндрических траверс, диаметр которых может изменяться путем наложения и снятия сменных накладок, выполняемых в виде полых деревянных полуцилиндров, и содержащий датчик силы, выполненный в виде упругого элемента с тензорезисторами, объединенными в две мостовые схемы, связанные с измерительной системой, отличающееся тем, что содержит основание с закрепленными узлом фиксации локтевого сустава и узлом измерения, включающим вертикальную раму, установленную шарнирно с возможность вращения относительно вертикальной оси, шарнирно соединенную с горизонтальной рамой, установленной с возможностью вращения относительно продольной оси, снабженной противовесами и осью для крепления рабочей рамы кистевого захвата с опорным элементом, установленной с возможностью вращения относительно горизонтальной оси, при этом каждая рама снабжена датчиком угла поворота, а измерительная система содержит блок управления.
| Клавиатура для буквопечатающих счетных и наборных машин | 1932 |
|
SU31945A1 |
| Устройство для измерения мышечной силы | 1989 |
|
SU1688846A1 |
| КИСТЕВОЙ ЭРГОМЕТР | 1998 |
|
RU2153287C2 |
| Динамометр для определения силы сжатия кисти руки | 1962 |
|
SU152331A1 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 1996 |
|
RU2138146C1 |
| WO 2012009679 A2, 19.01.2012 | |||
| GUDE D | |||
| et al | |||
| Automated hand-forearm ergometer data collection system | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| no | |||
| 6346442, pp | |||
| РЫЧАГ ДЛЯ ИЗВЛЕЧЕНИЯ НАБИВКИ ИЗ САЛЬНИКОВ | 1925 |
|
SU2379A1 |

