Изобретение относится к области машиностроения, а именно к гидравлическим приводам, и может быть использовано в подъемно-транспортных механизмах для вывешивания (подъема) и горизонтирования грузовых платформ, расположенных на неподвижной площадке.
Известен гидравлический привод перемещения грузовой платформы, содержащий гидроопоры, установленные на платформе и связанные магистралями с дозатором возвратно-поступательного движения, реверсивным распределителем и источником питания (авт. св. SU №602697, МПК2 F 15 В 11/22, 1978 г.). Количество секций дозатора равно количеству гидроопор. В магистрали, связывающие гидроопоры с дозатором, включены золотники горизонтирования, соединенные с баком. Горизонтирование платформы, содержащей четыре установленные по ее углам гидроопоры, осуществляется путем синхронного перемещения вверх сначала одной, а затем второй пары смежных гидроопор при одновременном переключении соответствующих пар золотников горизонтирования.
Недостатком известного привода является то, что для вывешивания и горизонтирования грузовой платформы требуется дозатор больших габаритов и массы, так как объем каждой секции дозатора определяется суммой объемов, потребных на холостой ход гидроопор (выпуск штоков до контакта с опорной площадкой или втягивание штоков), на рабочий ход гидроопор при подъеме (опускании) платформы и на рабочий ход гидроопор при ее горизонтировании.
Наиболее близким по совокупности существенных признаков к заявляемому изобретению является гидравлический привод вывешивания и горизонтирования грузовой платформы по патенту RU №2103566, МПК6 F 15 B 11/22, 1998 г. Этот привод содержит гидроопоры, установленные на платформе, дозатор возвратно-поступательного движения, реверсивный распределитель и источник питания, связанные магистралями, управляемые обратные клапаны, надклапанные полости которых сообщены с гидроопорами, и дополнительный распределитель, соединенный с источником питания и с поршеньковыми и штоковыми полостями упомянутых клапанов. Привод снабжен золотниками горизонтирования, связанными с источником питания, баком и поршеньковыми полостями управляемых обратных клапанов. В магистраль, соединяющую реверсивный распределитель с дозатором, включен дроссель, предназначенный для ограничения скорости опускания платформы. Фиксация платформы в требуемых положениях осуществляется с помощью односторонних трехлинейных гидрозамков, установленных в магистрали, соединяющие дозатор с гидроопорами. К штоковым полостям управляемых обратных клапанов подключен перепускной клапан, давление настройки которого больше давления, потребного для холостого выпуска штоков гидроопор до контакта с опорной площадкой, но меньше рабочего давления в менее нагруженных гидроопорах при подъеме платформы. Привод содержит также подключенный к источнику питания предохранительный клапан, давление настройки которого превышает рабочее давление, развиваемое источником питания при подъеме платформы. Количество секций (поршней) дозатора равно количеству гидроопор. В варианте использования дозатора как одноходового элемента для подъема и горизонтирования платформы требуется дозатор больших габаритов и массы, поскольку объем каждой его секции определяется суммой объемов, потребных на рабочий ход гидроопор при подъеме платформы и на рабочий ход гидроопор при ее горизонтировании. Для уменьшения массогабаритных параметров дозатора и, соответственно, привода в целом дозатор можно использовать как многоходовый элемент. В этом случае после каждого рабочего хода поршней дозатора под нагрузкой (кроме последнего хода) осуществляется реверс его поршней вхолостую в исходное положение путем переключении дополнительного распределителя в соответствующую позицию.
Недостатком известного привода является большая продолжительность операций вывешивания (подъема) и горизонтирования платформы при использовании дозатора как многоходового элемента, определяемая суммарным временем рабочих ходов поршней дозатора и обратных (реверсивных) ходов его поршней. Причем скорость поршней дозатора при обратном ходе существенно меньше скорости их рабочего хода, что объясняется следующими обстоятельствами. Направление обратного хода поршней дозатора при подъеме и горизонтировании платформы совпадает с направлением рабочего хода этих поршней при опускании платформы, причем в обоих случаях рабочая жидкость из соответствующих полостей дозатора вытесняется в бак через дроссель, сопротивление которого назначается из условия обеспечения опускания платформы с приемлемой скоростью. Если скорость опускания платформы равна скорости ее подъема (и скорости движения гидроопор при ее горизонтировании), то соответственно скорость рабочего хода поршней дозатора при опускании платформы (когда давление в полостях дозатора, связанных с дросселем, равно среднему значению рабочих давлений в гидроопорах) равна скорости их рабочего хода при подъеме платформы, определяемой производительностью источника питания. При этом перепад давления на дросселе в процессе опускания платформы равен среднему значению рабочих давлений в гидроопорах (без учета гидромеханических потерь в приводе). С другой стороны, реверс поршней дозатора вхолостую при выполнении операций вывешивания и горизонтирования платформы осуществляется при давлении в его полостях, равном давлению настройки перепускного клапана, которое определяет перепад давления на дросселе при выполнении указанных операций. Поскольку это давление существенно меньше среднего значения рабочих давлений в гидроопорах, пропускная способность дросселя существенно снижается, и в процессе реверса большая часть расхода рабочей жидкости, подаваемого источником питания, через перепускной клапан поступает в бак, вследствие чего скорость обратного хода поршней дозатора вхолостую становится значительно меньше скорости их рабочего хода. Соответственно возрастает продолжительность операций подъема и горизонтирования платформы. К числу недостатков известного привода следует отнести и затраты мощности при выполнении обратных ходов поршней дозатора вхолостую в процессе подъема и горизонтирования платформы. Величина указанных затрат определяется давлением настройки перепускного клапана. Недостатком известного привода являются также большие энергозатраты при выполнении операции опускания платформы, поскольку на данной операции источник питания работает в режиме максимальной мощности, определяемой давлением настройки предохранительного клапана.
Задачей, решаемой заявляемым изобретением, является сокращение периода работы гидравлического привода вывешивания и горизонтирования грузовой платформы при выполнении операций ее подъема и горизонтирования, а также снижение затрат мощности при выполнении данных операций.
Решение указанной задачи обеспечивается тем, что известный гидравлический привод вывешивания и горизонтирования грузовой платформы, содержащий гидроопоры, установленные на платформе, дозатор возвратно-поступательного движения, реверсивный распределитель, первое выходное отверстие которого сообщено с дозатором возвратно-поступательного движения, а второе - со штоковыми полостями гидроопор, управляемые обратные клапаны, надклапанные полости которых сообщены с гидроопорами, дополнительный распределитель, сообщенный с поршеньковыми и штоковыми полостями управляемых обратных клапанов, перепускной клапан, сообщенный магистралью со штоковыми полостями управляемых клапанов, источник питания и бак, согласно изобретению снабжен четырехлинейным гидрозамком, надклапанная полость последнего сообщена с дозатором возвратно-поступательного движения, подклапанная полость - с первым выходным отверстием реверсивного распределителя, штоковая полость - с баком, а управляющая камера - со штоковыми полостями управляемых обратных клапанов. Такое исполнение позволяет сократить период работы привода вывешивания и горизонтирования грузовой платформы при выполнении операций ее подъема и горизонтирования благодаря сокращению времени обратных ходов поршней дозатора вхолостую. Использование заявляемого привода позволяет также снизить затраты мощности, необходимые для осуществления указанных обратных ходов поршней дозатора.
Вместе с этим гидравлический привод дополнительно содержит два обратных клапана, первый из которых установлен в упомянутую магистраль, сообщающую перепускной клапан со штоковыми полостями управляемых обратных клапанов, а второй установлен в магистраль, сообщающую перепускной клапан со вторым выходным отверстием реверсивного распределителя. Такое решение позволяет значительно снизить затраты мощности при выполнении операции опускания платформы.
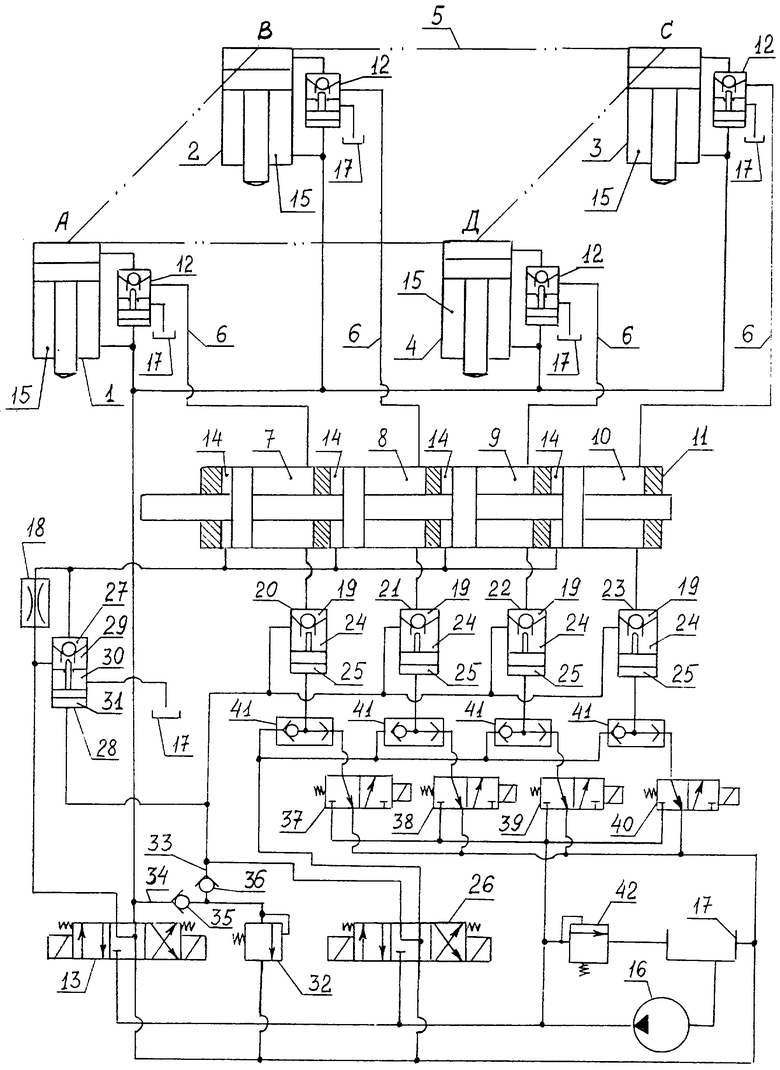
На чертеже представлена принципиальная гидросхема привода вывешивания и горизонтирования грузовой платформы.
Гидравлический привод вывешивания и горизонтирования грузовой платформы содержит гидроопоры 1-4, установленные на платформе 5 и сообщенные магистралями 6 с полостями 7-10 дозатора 11 возвратно-поступательного движения. В магистрали 6 включены односторонние гидрозамки 12, предназначенные для фиксации платформы 5 в поднятом положении. Реверсивный распределитель 13, служащий для изменения направления движения гидроопор 1-4 и дозатора 11, своим первым выходным отверстием сообщен с полостями 14 дозатора 11, а вторым - со штоковыми полостями 15 гидроопор 1-4 и с управляющими камерами гидрозамков 12. Входное и сливное отверстия реверсивного распределителя сообщены соответственно с источником питания (насосом) 16 и баком 17. Количество полостей, обозначенных на чертеже позициями 7-10, и количество полостей, обозначенных позицией 14, соответствуют количеству гидроопор. С помощью дросселя 18 обеспечивается ограничение скорости опускания платформы 5. К полостям 7-10 дозатора 11, сообщенным магистралями 6 соответственно с гидроопорами 1-4, подсоединены своими надклапанными полостями 19 управляемые обратные клапаны (УОК) 20-23. Количество УОК равно количеству гидроопор. Штоковые 24 и поршеньковые 25 полости УОК 20-23 через дополнительный распределитель 26 сообщены с насосом 16 и баком 17.
К полостям 14 дозатора 11 подсоединен своей надклапанной полостью 27 четырехлинейный гидрозамок 28, подклапанная полость 29 которого сообщена с первым выходным отверстием реверсивного распределителя 13, штоковая полость 30 - с баком 17, а управляющая камера 31 - со штоковыми полостями 24 УОК 20-23.
Перепускной клапан 32 через магистраль 33 сообщен со штоковыми полостями 24 УОК 20-23, а через магистраль 34 - со вторым выходным отверстием реверсионного распределителя 13. В указанные магистрали включены обратные клапаны 35 и 36, с помощью которых исключается работа насоса 16 на холостом ходу при переключении, соответственно, распределителя 26 в левую позицию (по чертежу), а распределителя 13 - в правую. Давление настройки перепускного клапана 32 больше величины давления, потребной для операции холостого выпуска штоков гидроопор до контакта с опорной площадкой (грунтом) перед подъемом платформы 5, но меньше рабочего давления в менее нагруженных гидроопорах (гидроопорах 1, 2 или 3, 4) при подъеме платформы 5.
Конструктивные параметры гидрозамков 12 (диаметр управляющего поршенька, диаметр штока и диаметр седла корпуса) назначаются из условий открытия и гарантированного удержания этих гидрозамков в открытом положении под действием давления в их управляющих камерах, равного давлению настройки перепускного клапана 32, при выполнении операции опускания платформы 5.
Двухпозиционные золотники горизонтирования 37-40 соединены с поршеньковыми полостями 25 УОК 20-23, насосом 16 и баком 17. Количество золотников горизонтирования равно количеству гидроопор. С помощью челночных клапанов 41 исключается работа насоса 16 на холостом ходу при переключении распределителя 26 или золотников горизонтирования 37-40 в правую позицию. К напорной магистрали насоса 16 подключен предохранительный клапан 42, давление настройки которого несколько больше рабочего давления, развиваемого насосом 16 при подъеме платформы 5. Гидравлический привод содержит также фильтр и устройство для разгрузки насоса (на чертеже не показаны).
Гидравлический привод вывешивания и горизонтирования грузовой платформы работает следующим образом.
В исходном положении все распределители занимают позиции, как показано на чертеже. После запуска насоса 16 дополнительный распределитель 26 переключают в левую позицию, и рабочая жидкость (масло) от насоса 16 через указанный распределитель, УОК 20-23, полости 7-10 дозатора 11 и магистрали 6 поступает в поршневые полости гидроопор 1-4, перемещая в несинхронном режиме их поршни вниз вхолостую. Из штоковых полостей 15 гидроопор 1-4 масло через реверсивный распределитель 13 сливается в бак 17. Таким образом, осуществляется операция выпуска штоков гидроопор 1-4 до контакта с грунтом. При этом ход поршней дозатора 11 не используется, и они остаются в исходном левом положении. После того как штоки гидроопор 1-4 коснутся грунта, давление в приводе повышается до величины, на которую настроен перепускной клапан 32. При срабатывании этого клапана подается сигнал на возвращение дополнительного распределителя 26 в исходную среднюю позицию. На этом операция холостого выпуска штоков гидроопор 1-4 заканчивается.
Операция вывешивания (подъема) платформы 5 при использовании дозатора 11 как многоходового элемента осуществляется следующим образом. Реверсивный распределитель 13 переключают в левую позицию, и масло от насоса 16 через указанный распределитель и гидрозамок 28 поступает в полости 14 дозатора 11, осуществляя рабочий ход его поршней вправо. Из полостей 7-10 дозатора 11 масло через магистрали 6 и гидрозамки 12 вытесняется в поршневые полости гидроопор 1-4, перемещая их вверх в синхронном режиме и осуществляя, тем самым, первый цикл подъема платформы 5. Из штоковых полостей 15 гидроопор 1-4 масло через реверсивный распределитель 13 сливается в бак 17. После перемещения поршней дозатора 11 вправо на величину рабочего хода подается сигнал на их реверс вхолостую. При этом реверсивный распределитель 13 возвращается в исходную позицию, давление в магистралях 6, полостях 7-10, 14 дозатора 11 снижается, и платформа 5 останавливается. Вес платформы 5 воспринимается давлением масла, запертого в поршневых полостях гидроопор 1-4 гидрозамками 12. Одновременно дополнительный распределитель 26 переключают в левую позицию, и масло от насоса 16 поступает в управляющую камеру 31 гидрозамка 28 и через УОК 20-23 в полости 7-10 дозатора 11. Управляющий поршенек гидрозамка 28 перемещается вверх (по чертежу), причем в процессе этого перемещения масло из штоковой полости 30 свободно сливается в бак 17. Гидрозамок 28 открывается и производится обратный ход поршней дозатора 11 вхолостую. Из полостей 14 дозатора 11 масло через открытый гидрозамок 28 и реверсивный распределитель 13 практически без сопротивления сливается в бак 17.
Следует заметить, что в заявляемом приводе период реверса поршней дозатора 11 минимален, поскольку в его полости 7-10 поступает весь расход масла от насоса 16. Затраты мощности при выполнении указанного движения также минимальны, так как давление, развиваемое насосом 16 в этот период, существенно меньше давления настройки перепускного клапана 32 и определяется лишь гидравлическими потерями в распределителе 26, УОК 20-23, гидрозамке 28 и распределителе 13, а также силами трения в дозаторе 11. В процессе обратного хода поршней дозатора 11 гидрозамок 28 гарантированно удерживается в открытом положении, что обусловлено следующими причинами. Во-первых, давление в его управляющей камере 31 несколько больше давления в его подклапанной полости 29 (на величину давления, определяемую гидравлическими потерями в УОК 20-23 и силами трения в дозаторе 11). Во-вторых, штоковая полость соединена с баком 17, вследствие чего давление в подклапанной полости 29, определяемое гидравлическими потерями в распределителе 13, воздействует только на торец штока этого гидрозамка. В-третьих, площадь управляющего поршенька гидрозамка 28 больше площади торца его штока. По этим причинам усилие от давления, действующее на поршенек со штоком со стороны управляющей камеры 31 и стремящееся открыть гидрозамок 28, значительно больше суммарного усилия, действующего на шток в противоположном направлении и определяемого усилием от давления в подклапанной полости 29 и усилием размещенной внутри гидрозамка 28 несиловой пружины (на чертеже не показана).
После перемещения поршней дозатора 11 вхолостую в исходное левое положение дополнительный распределитель 26 возвращается в исходную среднюю позицию, а реверсивный распределитель 13 переключают в левую позицию. При этом масло от насоса 16 через распределитель 13 и гидрозамок 28 поступает в полости 14 дозатора 11, перемещая его поршни под нагрузкой вправо и осуществляя, тем самым, следующий цикл подъема платформы 5.
Горизонтирование платформы 5 последовательно по ее сторонам производится в процессе подъема (при включенном реверсивном распределителе 13) путем включения и выключения пары соответствующих золотников горизонтирования. Для горизонтирования платформы 5 относительно, например, стороны АВ золотники 37 и 38 включают в правую позицию, соединяя насос 16 с поршеньковыми полостями 25 УОК 20 и 21. Указанные клапаны открываются, сообщая полости 7 и 8 дозатора 11 через открытые УОК 20 и 21 и дополнительный распределитель 26 с баком 17. Гидроопоры 1 и 2 останавливаются. Из полостей 9 и 10 дозатора 11 масло продолжает поступать в поршневые полости гидроопор 3 и 4, осуществляя тем самым первый цикл поворота платформы 5 относительно стороны АВ. После перемещения поршней дозатора 11 вправо на величину рабочего хода подается сигнал на их реверс вхолостую. При этом реверсивный распределитель 13 возвращается в исходную среднюю позицию, а золотники 37 и 38 - в исходную левую. Давление в магистралях 6, связанных с гидроопорами 3, 4, и в полостях 9, 10, 14 дозатора 11 снижается, и платформа 5 останавливается. Управляющие поршеньки УОК 20 и 21 возвращаются в исходное положение. Одновременно дополнительный распределитель 26 переключают в левую позицию, и масло от насоса 16 поступает в управляющую камеру 31 гидрозамка 28 и через УОК 20-23 в полости 7-10 дозатора 11. Гидрозамок 28 открывается, и производится обратный ход поршней дозатора 11 вхолостую. Из полостей 14 дозатора 11 масло через открытый гидрозамок 28 и реверсивный распределитель 13 сливается в бак 17. После возвращения поршней дозатора 11 в исходное левое положение дополнительный распределитель 26 переключают в исходную среднюю позицию, реверсивный распределитель 13 - в левую позицию, а золотники горизонтирования 37 и 38 - в правую. УОК 20 и 21 открываются. Масло от насоса 16 через распределитель 13 и гидрозамок 28 поступает в полости 14 дозатора 11, перемещая его поршни под нагрузкой вправо. Из полостей 7, 8 дозатора 11 масло через открытые УОК 20, 21 и распределитель 26 сливается в бак 17, а из полостей 9, 10 указанного дозатора масло поступает в поршневые полости гидроопор 3, 4, осуществляя тем самым следующий цикл поворота платформы 5 относительно стороны АВ. По достижении заданной точности горизонтирования золотники 37 и 38 выключаются, а УОК 20 и 21 закрываются. При этом масло из полостей 7-10 дозатора 11 поступает только в поршневые полости гидроопор 1-4, производя дальнейший подъем платформы 5.
После подъема платформы 5 на заданную высоту реверсивный распределитель 13 переключают в исходную среднюю позицию, а насос 16 выключают. Платформа 5 останавливается. Нагрузка от ее веса воспринимается давлением масла, запертого в поршневых полостях гидроопор 1-4 гидрозамками 12.
Для опускания платформы 5 в режиме синхронного движения гидроопор 1-4 после запуска насоса 16 реверсивный распределитель 13 переключают в правую позицию, сообщая насос 16 со штоковыми полостями 15 гидроопор 1-4, с поршеньковыми полостями гидрозамков 12 и через магистраль 34 и обратный клапан 35 с перепускным клапаном 32. Гидрозамки 12 открываются, и платформа 5 под действием своего веса и давления в штоковых полостях 15 гидроопор 1-4 перемещается вниз. При этом одна часть производительности насоса 16 поступает в штоковые полости 15 гидроопор 1-4, а другая часть через перепускной клапан 32 поступает в бак 17. Масло, вытесняемое из поршневых полостей гидроопор 1-4, по магистралям 6 поступает в полости 7-10 дозатора 11, осуществляя рабочий ход его поршней влево. Таким образом, выполняется первый цикл опускания платформы 5. Из полостей 14 дозатора 11 масло через дроссель 18 и реверсивный распределитель 13 поступает в бак 17. Скорость опускания платформы 5 определяется настройкой дросселя 18. Затраты мощности при этом невелики, поскольку давление, развиваемое насосом 16, определяется давлением настройки перепускного клапан 32, которое существенно меньше давления настройки предохранительного клапана 42.
После перемещения поршней дозатора 11 в крайнее левое положение подается сигнал на их реверс вхолостую. При этом реверсивный распределитель 13 переключают в левую позицию, а дополнительный распределитель 26 - в правую. Давление в штоковых полостях 15 гидроопор 1-4 и управляющих полостях гидрозамков 12 снижается, указанные гидрозамки закрываются, и платформа 5 останавливается. Масло от насоса 16 поступает через распределитель 13 и гидрозамок 28 в полости 14 дозатора 11 и через распределитель 26 и челночные клапаны 41 в поршеньковые полости 25 УОК 20-23. Последние открываются и производится обратный ход поршней дозатора 11 вхолостую. Из полостей 7-10 дозатора 11 масло через открытые УОК 20-23 и распределитель 26 сливается в бак 17. После перемещения поршней дозатора 11 в крайнее правое положение дополнительный распределитель 26 возвращается в исходную среднюю позицию, а реверсивный распределитель 13 переключают в правую позицию. УОК 20-23 закрываются, гидрозамки 12 открываются и выполняется следующий цикл опускания платформы 5 в режиме синхронного движения гидроопор 1-4. После того как какая-либо сторона платформы 5 (например, сторона АВ) закончит движение вниз, платформа начнет поворачиваться относительно неподвижной стороны АВ, стремясь занять положение, исходное перед подъемом. В этот период времени масло поступает в полости 7-10 дозатора 11 как вследствие опускания стороны СД (перемещения вниз корпусов гидроопор 3, 4), так и вследствие начала втягивания штоков гидроопор 1, 2.
После подхода поршней дозатора 11 в крайнее левое положение (при этом платформа занимает положение, исходное перед подъемом) подается сигнал на выполнение операции втягивания штоков гидроопор 1-4 вхолотую в исходное верхнее положение. Дополнительный распределитель 26 переключают в правую позицию, соединяя насос 16 через челночные клапаны 41 с поршеньковыми полостями 25 УОК 20-23. Последние открываются, и штоки гидроопор 1-4 под действием давления масла в их штоковых полостях 15 несинхронно перемещаются вверх. Из поршневых полостей гидроопор 1-4 масло через открытые гидрозамки 12, магистрали 6, полости 7-10 дозатора 11, открытые УОК 20-23 и дополнительный распределитель 26 сливается в бак 17.
После полного втягивания всех штоков гидроопор 1-4 реверсивный распределитель 13 и дополнительный распределитель 26 возвращаются в исходную среднюю позицию, УОК 20-23 и гидрозамки 12 закрываются, а насос 16 выключается.
Таким образом, предлагаемое изобретение обеспечивает сокращение периода работы гидропривода вывешивания и горизонтирования грузовой платформы при выполнении операции ее подъема и горизонтирования благодаря сокращению времени холостых ходов поршней дозатора, а также снижение затрат мощности при выполнении указанных операций.
Для подтверждения эффективности предлагаемого гидропривода по сравнению с известным гидроприводом по патенту RU №2103566 рассмотрим численный пример.
Исходные данные:
1. Рабочее давление в одной паре соседних гидроопор
p1=27 МПа,
рабочее давление в другой паре соседних гидроопор
р2=9 МПа.
2. Давление настройки перепускного клапана 2 МПа.
3. Скорость UП перемещения поршней дозатора при подъеме платформы равна скорости UОП перемещения этих поршней при ее опускании
UП=UОП-U.
4. Продолжительность рабочего хода поршней дозатора (при выполнении одного цикла подъема или опускания платформы) обозначим Т.
5. Операция подъема платформы осуществляется при следующих движениях поршней дозатора: рабочий ход - реверс вхолостую - рабочий ход.
При указанных исходных данных перепад давления на дросселе в процессе опускания платформы равен (без учета гидравлических потерь в элементах привода)
В известном гидроприводе реверс поршней дозатора (в процессе цикличного подъема платформы) производится при давлении, определяемом давлением настройки перепускного клапана. Следовательно, перепад давления на дросселе в процессе указанного реверса равен
С учетом известной квадратичной зависимости перепада давления на дросселе от проходящего через него расхода можно записать следующее соотношение:

откуда

где Upeв - скорость движения поршней дозатора при их реверсе.
Как следует из приведенных данных, скорость движения поршней дозатора при их реверсе в 3 раза меньше скорости рабочего хода этих поршней под нагрузкой. Соответственно, период Трев реверса поршней дозатора в 3 раза больше продолжительности их рабочего хода, т.е.
Тpeв=3Т.
Общая продолжительность То операции подъема платформы с помощью известного гидропривода равна
То=Т+Трев+Т=5Т.
С другой стороны, в предлагаемом гидроприводе реверс поршней дозатора вхолостую при подъеме платформы осуществляется со скоростью, равной скорости их рабочего хода под нагрузкой, поскольку как при рабочем ходе, так и при реверсе поршней дозатора в его соответствующие полости поступает весь расход масла от насоса. Следовательно, применительно к указанным исходным данным общая продолжительность То операции подъема платформы с помощью заявляемого привода равна
То=Т+Т+Т=3Т.
Как следует из сопоставления полученных численных данных, при использовании заявляемого гидропривода по сравнению с известным гидроприводом общая продолжительность операции подъема платформы уменьшается на 40%.
Сопоставим заявляемый и известный гидроприводы по величинам затрат мощности в процессе реверса поршней дозатора (при выполнении операции подъема платформы), а также при выполнении операции ее опускания.
В известном гидроприводе давление, развиваемое насосом в процессе реверса поршней дозатора, равно давлению настройки перепускного клапана, т.е. 2 МПа. В заявляемом гидроприводе давление, развиваемое насосом в процессе этого реверса, определяется только гидравлическими потерями в элементах привода. Пусть указанные потери равны 0,5 МПа. В этом случае при использовании заявляемого гидропривода затраты мощности в процессе реверса поршней дозатора снижаются в 4 раза.
В известном гидроприводе давление, развиваемое насосом при опускании платформы, равно давлению настройки ркп предохранительного клапана, которое должно быть больше рабочего давления p1 в наиболее нагруженных гидроопорах (при этом обеспечивается гарантированное удержание односторонних трехлинейных гидрозамков в открытом положении). Применительно к условиям рассматриваемого примера величину давления настройки указанного клапана примем равной
ркп=30 МПа>р1=27 МПа.
В заявляемом гидроприводе давление, развиваемое насосом при опускании платформы, определяется давлением настройки перепускного клапана, равным 2 МПа. Следовательно, при использовании заявляемого гидропривода затраты мощности при выполнении указанной операции снижаются в 15 раз. При этом существенно уменьшается износ насоса и, соответственно, увеличивается ресурс его работы.
Таким образом, благодаря особенности исполнения гидравлического привода вывешивания и горизонтирования грузовой платформы заявляемое изобретение обеспечивает сокращение периода работы привода при выполнении операций подъема и горизонтирования платформы, снижение затрат мощности при выполнении как этих операций, так и операции опускания платформы, а также увеличение ресурса источника питания.
Гидравлический привод предназначен для вывешивания и горизонтирования грузовой платформы. Гидравлический привод содержит гидроопоры, установленные на платформе, дозатор возвратно-поступательного движения, реверсивный распределитель, первое выходное отверстие которого сообщено с дозатором возвратно-поступательного движения, а второе - со штоковыми полостями гидроопор, управляемые обратные клапаны, надклапанные полости которых сообщены с гидроопорами, дополнительный распределитель, сообщенный с поршеньковыми и штоковыми полостями управляемых обратных клапанов, перепускной клапан, сообщенный магистралью со штоковыми полостями управляемых обратных клапанов, источник питания и бак, кроме того, привод снабжен четырехлинейным гидрозамком, надклапанная полость последнего сообщена с дозатором возвратно-поступательного движения, подклапанная полость - с первым выходным отверстием реверсивного распределителя, штоковая полость - с баком, а управляющая камера - со штоковыми полостями управляемых обратных клапанов. Технический результат -снижение затрат мощности. 1 з.п. ф-лы, 1 ил.
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1995 |
|
RU2103566C1 |
| Подвеска опорного катка транспортного средства | 1975 |
|
SU602397A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2128790C1 |
| DE 1920184 В2, 27.11.1969 | |||
| US 3625115 А, 07.12.1971. | |||

