Изобретение относится к транспортному машиностроению, в частности, к трансмиссиям транспортных средств.
Известен способ перемещения транспортного средства за счет передачи вращения от двигателя установки к ведущим колесам.
К причинам, препятствующим достижению требуемого технического результата при использовании известного способа, относится то, что в известном способе происходит значительное колебание крутящего момента на ведущих колесах за счет поворота двигательной установки относительно ведущих колес.
Наиболее близким техническим решением того же назначения к заявленному способу по совокупности признаков является способ работы устройства для стабилизации крутящего момента на ведущих колесах транспортного средства, заключающийся в том, что снижают амплитуду колебаний крутящего момента при помощи исполнительного механизма, соединенного с редуктором для передачи крутящего момента к движителям (авт. св. СССР N 559849, кл. B 60 K 17/32, 1977).
Указанное техническое решение принято за прототип для способа.
Наиболее близким устройством того же назначения к заявленному устройству по совокупности признаков является устройство для стабилизации крутящего момента на ведущих колесах транспортного средства, содержащих двигательную установку, движители, редуктор для передачи к движителям, исполнительный механизм, соединенный с редуктором для передачи крутящего момента к движителям (авт. св. СССР N 559849, кл. B 60 K 17/32, 1977).
Указанное устройство принято за прототип для устройства.
К причинам, препятствующим достижению требуемого технического результата при использовании известного технического решения, принятого за прототип, относится то, что в известном техническом решении не могут быть полностью устранены колебания крутящего момента при повороте двигательной установки относительно движителей, а только уменьшается амплитуда колебаний моментов.
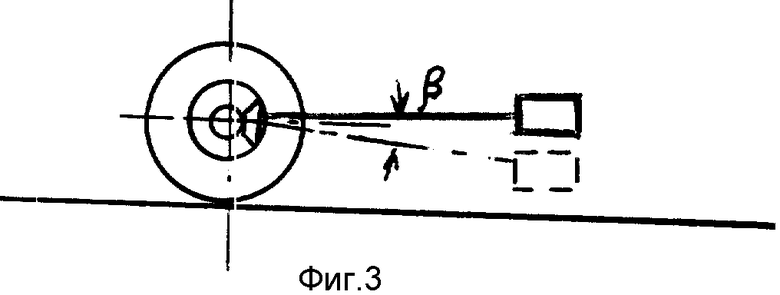
Поворот двигательной установки на угол β (фиг. 3, 4) относительно оси ведущих колес при мгновенно зафиксированных углах поворота ведущего колеса относительно поверхности качения и коленчатого вала относительно блока двигателя вызовет изменение момента на ведущих колесах на величину:
ΔM = β•C,
где C - тангенциальная (окружная) жесткость ведущих шин и полуосей.
Поворот двигательной установки поперек продольной оси колес, т.е. вокруг приводного карданного вала вызовет изменение крутящего момента на величину:
где i - передаточное число трансмиссии от вала, вокруг которого происходит поворот двигательной установки до движителей.
Поворот двигательной установки относительно продольной оси любого вала, передающего момент на движители, приводит к изменению величины передаваемого момента.
Появляется рассогласование угла поворота в первом случае на величину β , во втором на  , если это рассогласование каким-то образом убрать, то и не будет изменения крутящего момента. Это возможно осуществить, если передавать вращение на движители от двух источников - от основного двигателя и дополнительного устройства. Сложение движений может быть обеспечено через редуктор с двумя степенями свободы (например, планетарный или дифференциальный).
, если это рассогласование каким-то образом убрать, то и не будет изменения крутящего момента. Это возможно осуществить, если передавать вращение на движители от двух источников - от основного двигателя и дополнительного устройства. Сложение движений может быть обеспечено через редуктор с двумя степенями свободы (например, планетарный или дифференциальный).
Задача, на решение которой направлены заявленные изобретения - повышение надежности транспортного средства за счет снижения динамических нагрузок.
Технический результат, который может быть получен при осуществлении заявленных изобретений - устранение влияния на колебание крутящего момента углового поворота двигательной установки относительно движителей (ведущих колес).
Указанный технический результат при осуществлении заявленного способа достигается тем, что в способе работы известного устройства для стабилизации крутящего момента на ведущих колесах транспортного средства, угол поворота ведущего моста с редуктором для передачи крутящего момента к движителям, связанным с валом, приводящим движители, увеличивают или уменьшают пропорционально углу поворота двигательной установки относительно движителей.
Указанный технический результат при осуществлении заявленного устройства достигается тем, что в известном устройстве для стабилизации крутящего момента на ведущих колесах транспортного средства одно из звеньев редуктора для передачи крутящего момента к движителям соединено с двигательной установкой, другое звено соединено с валом, приводящим движители, а третье звено редуктора для передачи крутящего момента к движителям соединено с исполнительным механизмом, устройство снабжено датчиком угла поворота двигательной установки относительно движителей для управления исполнительным механизмом.
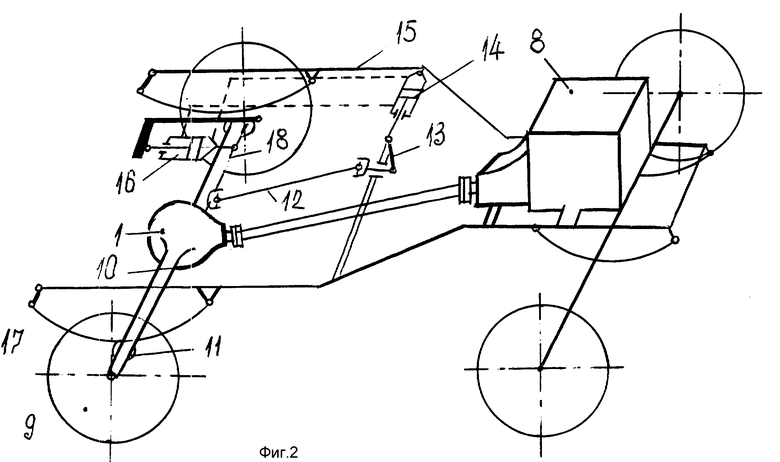
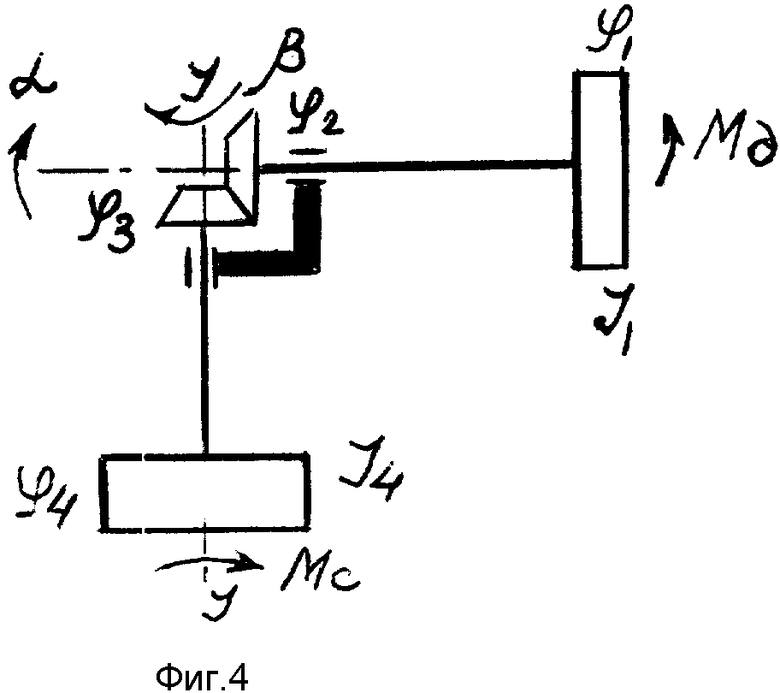
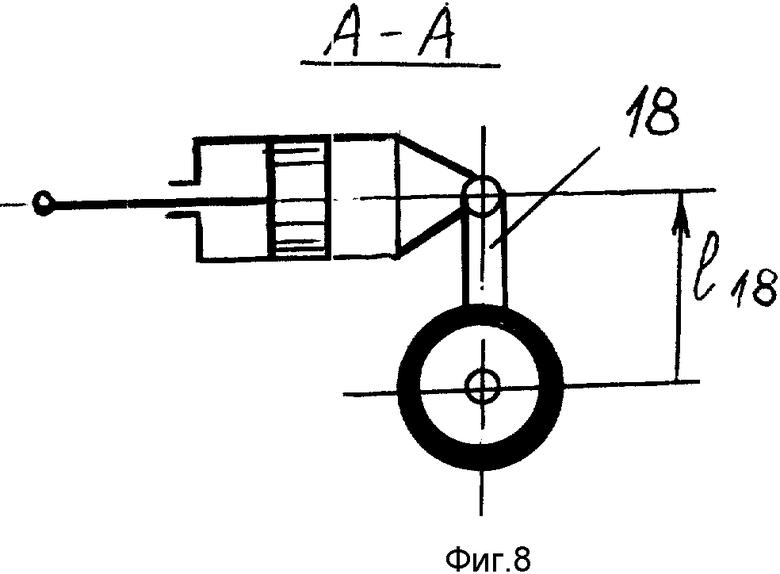
На фиг. 1 представлена схема заявленного устройства; на фиг. 2 - общий вид устройства; на фиг. 3 - схема поворота двигательной установки относительно движителей; на фиг. 4 - упрощенная динамическая модель движущегося транспортного средства; на фиг. 5 - изменение величины крутящего момента, передаваемого на движители, для транспортного средства без компенсатора угловых колебаний и закон изменения угла α ; на фиг. 6 - изменение величины передаваемого момента для транспортного средства с компенсатором угловых колебаний (при таком же законе изменения угла α как представленный на фиг. 4); на фиг. 7 - установка рычага 18; на фиг. 8 - сечение на фиг. 7.
Устройство для стабилизации крутящего момента на ведущих колесах (движителях) транспортного средства содержит двигательную установку 8, двигатели 9, редуктор 1 для передачи крутящего момента к движителям, исполнительный механизм 5, соединенный с редуктором для передачи крутящего момента к движителям, одно из звеньев редуктора 1 для передачи крутящего момента к движителям соединено с двигательной установкой 8, другое звено 3 соединено с валом, приводящим движители, а третье звено 4 редуктора 1 для передачи крутящего момента к движителям соединено с исполнительным механизмом 5, устройство снабжено датчиком 7 угла поворота двигательной установки относительно движителей для управления исполнительным механизмом 5.
Исполнение датчиков, блоков управления исполнительного механизма может быть электрическим, гидравлическим, механическим. Одно из возможных исполнении устройства показано на фиг. 2 и состоит в следующем.
Ведущий мост 10 с редуктором 1 закреплен на рессорах с возможностью поворота относительно них в подшипниках 11. На корпусе моста жестко закреплен один конец телескопического карданного вала 12, на другом конце его закреплен рычаг 13. Он соединен со штоком гидроцилиндра 14, закрепленного на раме 15. Полости этого цилиндра соединены с полостями второго гидроцилиндра 16, шток которого соединен с рессорой 17, а гильза с рычагом 18, закрепленным на корпусе моста. Рычаг 18 представляет собой прилив на корпусе ведущего моста (или планку, прикрепленную к корпусу моста). Длины рычагов 18 и 13 (если они установлены перпендикулярно оси гидроцилиндра) должны удовлетворять условию:
l18/l13=lр ,
где l18 - длина рычага 18,
l13 - длина рычага 13,
lp - передаточное число редуктора моста.
Работа устройства осуществляется следующим образом.
При повороте ведущего моста относительно продольной оси двигательной установки 8 (за счет наезда одним колесом на неровность поверхности качения) телескопический вал 12 поворачивается относительно рамы машины 15, что приводит к перемещению штока гидроцилиндра 16, а это в свою очередь сопровождается поворотом ведущего моста вокруг его продольной оси и соответственно поворотом вала приводящего движителя вокруг его оси, совпадающей с осью ведущего моста.
При одинаковых диаметрах поршней штоков обоих гидроцилиндров отношение расстояния от центра проушины рычага 18 до продольной оси моста 10 к длине рычага 13 должно равняться передаточному числу редуктора моста 10.
В рассмотренном случае датчик угла поворота ведущего моста относительно двигательной установки выполнен в виде телескопического карданного вала 12 с рычагом 13. Блок управления выполнен в виде гидроцилиндра 14, а исполнительный механизм - в виде гидроцилиндра 16.
Способ стабилизации крутящего момента на ведущих колесах транспортного средства заключается в том, что снижают амплитуду колебаний крутящего момента при помощи исполнительного механизма 5, соединенного с редуктором 1, для передачи крутящего момента к движителям 9, при этом увеличивают или уменьшают угол поворота ведущего моста 10 с редуктором 1 для передачи крутящего момента к движителям, связанным с валом, приводящим движители, вокруг его продольной оси пропорциональному углу поворота (в частности, α или β) двигательной установки 8 относительно движителей 9.
На фиг. 4 представлена упрощенная динамическая модель движущегося транспортного средства, на ней: Y1 - моменты инерции вращающихся деталей двигателя; MD - крутящий момент, передаваемый двигателем; ϕ1 - угол поворота маховика двигателя; C1-2 - жесткость валов трансмиссии на кручение от первичного вала КПП до ведущей шестерни конического редуктора заднего моста; ϕ2 - угол поворота ведущей шестерни редуктора моста; ϕ3 - угол поворота ведомой шестерни мостов; ϕ4 - угол поворота ведущего колеса; C3-4 - угловая жесткость на кручение деталей трансмиссии от ведомой шестерни до ведущего колеса (с учетом жесткости на кручение шин); Mc - момент сопротивления передвижению агрегата; Y4 - приведенный (к оси колеса, например) момент инерции поступательно движущейся массы машины.
При равномерном движении машины MD = Mc. Передача момента сопровождается закручиванием валов. В этом случае MD= (ϕ1-ϕ2)•C1-2 и MC= (ϕ3-ϕ4)•C3-4 и ϕ3= ϕ2. .
В случае, если двигательная установка поворачивается относительно продольной оси ведущей шестерни редуктора заднего моста на угол β , то угол поворота ϕ3= ϕ2± β в формуле (+) соответствует повороту двигательной установки в направлении вращения ведущей шестерни и (-) - в противоположную.
Аналогичное выражение будет, если двигательная установка поворачивается относительно ведущих колес. Уравнения движения машины будут такими:
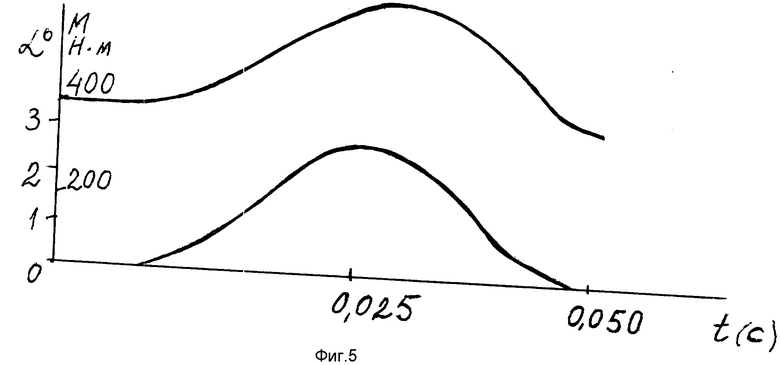
Решение этих уравнений представлено на фиг. 5, здесь принято изменение угла α во времени по закону:
α = A•(1-cosωt)
Из этого графика видна существенная зависимость передаваемого момента от изменения угла α (или β) . На основании чего можно сделать заключение:
1. Угловые колебания двигательной установки относительно продольной оси приводного вала за счет неровностей поверхности качения приводят к колебаниям передаваемого крутящего момента.
2. Корректируя угол поворота приводного вала (например, ведущих полуосей), можно изменять величину передаваемого момента.
Величина крутящего момента на полуоси определяется выражением:
если за счет неровностей поверхности качения появляется какое-то значение угла α (или β) , то для поддержания величины крутящего момента на прежнем уровне угол поворота ϕ3 должен остаться на прежнем уровне, т.е. его необходимо изменить на величину α(β) , это достигается предложенным способом - применением редуктора с двумя степенями свободы, у которого угол поворота выходного звена зависит от угла поворота двух остальных звеньев, одно из которых связано с коленчатым валом двигателя, а угол поворота другого зависит от угла α (или β) .
Конструктивное предложение позволяет стабилизировать величину передаваемого момента. На фиг. 6 показано изменение величины передаваемого момента для машины с компенсатором угловых колебаний (при таком же законе изменения угла), уменьшение амплитуды ≈ 100 раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАТОР УГЛОВЫХ КОЛЕБАНИЙ | 1999 |
|
RU2192971C2 |
| Способ и устройство для стабилизации крутящего момента на ведущих колесах | 2017 |
|
RU2668141C1 |
| СПОСОБ СТАБИЛИЗАЦИИ КРУТЯЩЕГО МОМЕНТА В ТРАНСМИССИИ АГРЕГАТА, СОВЕРШАЮЩЕГО УГЛОВЫЕ КОЛЕБАНИЯ ВОКРУГ ПРИВОДНОГО ВАЛА, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518508C1 |
| Устройство для стабилизации крутящего момента на ведущих колесах транспортного средства | 2022 |
|
RU2778736C1 |
| СПОСОБ СТАБИЛИЗАЦИИ КРУТЯЩЕГО МОМЕНТА В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601509C1 |
| УСТРОЙСТВО ДЛЯ СНИЖЕНИЯ ДИНАМИЧЕСКОЙ НАГРУЖЕННОСТИ ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2558159C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ КРУТЯЩЕГО МОМЕНТА НА ВЕДУЩИХ КОЛЕСАХ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2549503C1 |
| Редуктор с изменяемым углом поворота ведомого вала относительно ведущего вала | 2024 |
|
RU2822949C1 |
| Механизм компенсации продольных смещений ведущего моста | 2017 |
|
RU2674966C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ КРУТЯЩЕГО МОМЕНТА НА ВЕДУЩИХ КОЛЕСАХ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2481967C1 |


Изобретение относится к транспортному машиностроению, в частности, к трансмиссиям тракторных средств. Способ стабилизации крутящего момента на ведущих колесах транспортного средства заключается в том, что увеличивают или уменьшают угол поворота ведущего моста с редуктором для передачи крутящего момента, связанным с валом, приводящим движители, вокруг его продольной оси пропорционально углу поворота двигательной установки относительно движителя. Устройство, реализующее указанный способ, содержит двигательную установку, движители, редуктор для передачи крутящего момента к движителям, исполнительный механизм, соединяющий с редуктором, предназначенный для поворота редуктора вокруг его продольной оси, и датчик угла поворота редуктора для управления исполнительным механизмом. 2 с. п. ф-лы, 8 ил.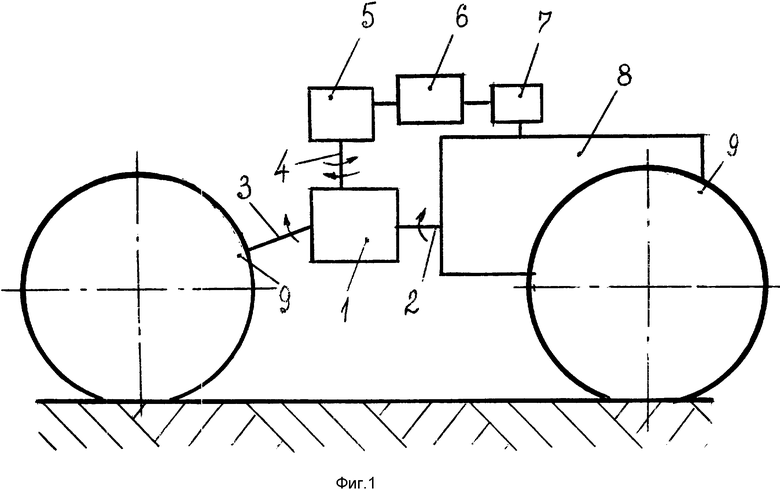
| SU, авторское свидетельство, 559849, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
