Изобретение относится к информационно-измерительной технике и преимущественно может быть использовано в системах навигации.
Известны способы определения расстояния до объекта с помощью активных лазерных или радиолокаторов [1-3], заключающиеся в формировании и направлении на объект зондирующего электромагнитного излучения, приеме отраженного от объекта излучения, преобразование его в электрический сигнал, измерении сдвига фаз между зондирующим и отраженным сигналами и определении на основании последнего расстояния до объекта.
Недостатком указанных способов является необходимость формирования зондирующего сигнала, что требует прецизионного наведения на объект формирователя зондирующего сигнала и приводит к существенным энергопотреблению, массе и габаритам при реализации системы.
Известны способы определения расстояния до объекта [4-5], которые заключаются в приеме собственного или отраженного оптического излучения объекта с помощью двух оптических систем, разнесенных в пространстве на известное расстояние (базу), формировании в фокальных плоскостях этих оптических систем изображений объекта, которые оказываются на различных расстояниях от оптической оси, определении линейного и затем углового параллакса и определении расстояния до объекта по полученным значениям базы и углового параллакса.
Недостатками указанных способов являются ограниченный диапазон измеряемых расстояний и необходимость разнесения на определенное расстояние оптических систем, что увеличивает габариты системы.
Известен способ определения расстояния до подводного источника звука [6] , заключающийся в приеме прямого и отраженных от водной поверхности и дна сигналов источника звука, определении времени задержки отраженных сигналов по отношению к прямому, измерении расстояний от приемника звука до водной поверхности и дна и определении расстояния до источника звука.
Недостатками указанного способа являются низкая точность и сложность определения расстояния при многолучевом отражении, что связано с немонотонным характером зависимости скорости звука от глубины, отсутствия данных о топографии дна и нелинейной связи между временем распространения звука и горизонтальным расстоянием до источника звука.
Наиболее близким по технической сущности к изобретению следует считать способ определения расстояния до источника звука [7], сущность которого заключается в следующем:
- принимают сигнал от источника звука по меньшей мере в трех точках траектории движения приемника звука;
- измеряют и запоминают интервалы времени между точками приема;
- измеряют и запоминают значения давления звука в точках приема;
- измеряют и запоминают углы направления движения приемника звука в точках приема в инерциальной системе координат;
- измеряют и запоминают углы направления на источник звука в точках приема в инерциальной системе координат;
- изменяют скорость и направление движения приемника звука;
- измеряют и запоминают скорости движения приемника звука в точках приема;
- определяют расстояние.
Недостатками прототипа являются необходимость изменения скорости и направления движения приемника звука и низкая точность определения расстояния при неравномерном и непрямолинейном движении источника звука.
Целью изобретения является повышение точности определения дальности до объекта и расширение функциональных возможностей за счет определения расстояния без маневрирования наблюдателя.
Сущность предлагаемого способа определения расстояния до объекта с подвижного наблюдателя заключается в следующем:
- наблюдают за объектом по меньшей мере из трех точек траектории движения наблюдателя;
- измеряют и запоминают интервалы времени между наблюдениями;
- измеряют и запоминают принимаемый поток электромагнитного излучения от объекта в точках наблюдения;
- измеряют и запоминают углы ориентации линии визирования объекта в инерциальной системе координат по крайней мере в одной точке наблюдения;
- измеряют углы направления на центр притяжения в инерциальной системе координат по крайней мере в одной точке наблюдения;
- определяют расстояние между наблюдателем и центром притяжения по крайней мере в одной точке наблюдения;
- определяют расстояние.
Следовательно, к отличительным признакам предлагаемого способа определения расстояния до объекта с подвижного наблюдателя относится то, что измеряются углы направления на центр притяжения в инерциальной системе координат по крайней мере в одной точке наблюдения, дополнительно определяется расстояние между наблюдателем и центром притяжения по крайней мере в одной точке наблюдения, после чего определяется расстояние до объекта.
Указанные отличительные признаки в известных аналогах не обнаружены. Поскольку данная совокупность отличительных признаков не может служить самостоятельным способом определенного назначения, дополнительная классификация данного способа в отношении его отличительных признаков невозможна. Ввиду того, что в предлагаемом способе для определения расстояния используются измерения углов ориентации линии визирования объекта и направления на центр притяжения, а также расстояние между наблюдателем и центром притяжения, маневрирование наблюдателя не требуется и при невозмущенном движении наблюдателя точность оказывается выше. Отмеченное свидетельствует о существенности отличительных признаков предлагаемого способа.
Техническая реализация предлагаемого способа определения расстояния до объекта с подвижного наблюдателя с помощью пассивных оптико-электронных средств может быть осуществлена устройством, структурная схема которого представлена на фиг. 1, где 1 - визир, 2 - блок измерения амплитуды сигнала, 3 - блок запоминания амплитуды сигнала, 4 - блок измерения угловых координат, 5 - блок запоминания угловых координат, 6 - блок определения направления на центр притяжения, 7 - блок определения расстояния между наблюдателем и центром притяжения, 8 - блок синхронизации и измерения времени, 9 - блок запоминания времени, 10 - вычислительный блок.
В устройстве последовательно соединены визир 1, блок 2 измерения амплитуды сигнала и блок 3 запоминания амплитуды сигнала, выход которого соединен с первым входом вычислительного блока 10. Блок 4 измерения угловых координат через блок 5 запоминания угловых координат подключен к второму входу вычислительного блока 10. Блок 6 определения направления на центр притяжения подключен к третьему входу вычислительного блока 10. Блок 7 определения расстояния до центра притяжения подключен к четвертому входу вычислительного блока 10. Блок 8 синхронизации и измерении времени через блок 9 запоминания времени подключен к пятому входу вычислительного блока 10. Выход визира 1 соединен с первым входом блока 4 измерения угловых координат. Второй выход блока 8 синхронизации и измерения времени соединен с входами визира 1, блока 6 определения направления на центр притяжения, блока 7 определения расстояния между наблюдателем и центром притяжения, с вторыми входами блока 2 измерения амплитуды сигнала, блока 3 запоминания амплитуды сигнала, блока 4 измерения угловых координат, блока 5 запоминания угловых координат.
Устройство работает следующим образом.
Синхронизируемый сигналами с блока 8 синхронизации и измерения времени визир 1 осуществляет прием электромагнитного излучения от объекта и преобразует его в электрический сигнал. По синхронизирующим сигналам с блока 8 синхронизации и измерения времени блок 2 измерения амплитуды сигнала выполняет оценку принимаемого визиром 1 потока электромагнитного излучения от объекта путем измерения амплитуды сигнала. Результаты измерения заносятся в блок 3 запоминания амплитуды сигнала, синхронизируемый блоком 8 синхронизации и измерения времени. Значения интервалов времени между наблюдениями из блока 8 синхронизации и измерения времени заносятся в блок 9 запоминания времени. Одновременно блок 4 измерения угловых координат, синхронизируемый блоком 8 синхронизации и измерения времени, выполняет измерение угловых приборных координат объекта, например, путем анализа временных параметров сигнала объекта, поступающего с визира 1. Результаты измерения заносятся в блок 5 запоминания угловых координат, синхронизируемый блоком 8 синхронизации и измерения времени. Блок 6 определения направления на центр притяжения, синхронизируемый сигналом начала отсчета с блока 8 синхронизации измерения времени, выполняет измерение угловых приборных координат направления на центр притяжения. Блок 7 определения расстояния между наблюдателем и центром притяжения 6, синхронизируемый сигналом начала отсчета с блока 8 синхронизации и измерения времени, определяет расстояние между наблюдателем и центром притяжения. После выполнения не менее трех наблюдений объекта, на основании полученной информации вычислительный блок 10 выполняет определение расстояния до объекта на момент последнего наблюдения, например, численным решением уравнения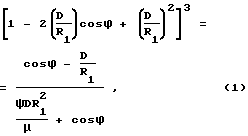
где D - расстояние до объекта;
R1 - расстояние между наблюдателем и центром притяжения;
μ - постоянная поля притяжения;
ϕ - угол между линией визирования объекта и направлением на центр притяжения;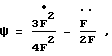
где F,  - поток электромагнитного излучения объекта, его первая и вторая производные соответственно, которые могут быть получены в результате статистической обработки результатов измерений, например, методом наименьших квадратов.
- поток электромагнитного излучения объекта, его первая и вторая производные соответственно, которые могут быть получены в результате статистической обработки результатов измерений, например, методом наименьших квадратов.
Правомерность использования уравнения (1) для определения расстояния до объекта подтверждается следующими соображениями. Рассмотрим движение наблюдателя (Н) и объекта (НО) в центральном поле, при этом выберем такую инерциальную систему координат, начало отсчета которой находится в центре притяжения, ось OY параллельна линии визирования объекта, ось OZ перпендикулярна плоскости, проходящей через центр притяжения, наблюдатель и объект, а ось OX дополняет систему до правой (фиг. 2). В этом случае проекция  ускорения наблюдателя относительно объекта на ось OY равна
ускорения наблюдателя относительно объекта на ось OY равна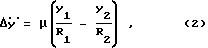
где Y1, Y2 - координаты наблюдателя и объекта по оси OY соответственно;
R2 - расстояние между объектом и центром притяжения.
Координаты Y1, Y2 по оси OY наблюдателя и объекта и расстояние R между объектом и центром притяжения выражаются через расстояния между наблюдателем и объектом и наблюдателем и центром притяжения следующим образом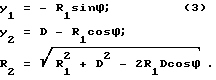
В результате подстановки выражений (3) в уравнение (2) и соответствующих преобразований получается следующее уравнение
Проекция  ускорения наблюдателя относительно объекта на ось OY равна D второй производной расстояния между наблюдателем и объектом по времени. Поскольку принимаемый поток электромагнитного излучения обратно пропорционален квадрату расстояния между наблюдателем и объектом, отношение второй производной
ускорения наблюдателя относительно объекта на ось OY равна D второй производной расстояния между наблюдателем и объектом по времени. Поскольку принимаемый поток электромагнитного излучения обратно пропорционален квадрату расстояния между наблюдателем и объектом, отношение второй производной  к расстоянию D запишется следующим образом
к расстоянию D запишется следующим образом
В результате подстановки выражения (5) в уравнение (4) получается уравнение (1), которое решается вычислительным блоком 10, например, методом Ньютона.
Таким образом, применение предлагаемого способа не требует маневрирования, т.е. изменения направления и величины скорости движения наблюдателя, которое необходимо при реализации способа - прототипа, что существенно расширяет функциональные возможности. Как показали исследования точности, предлагаемый способ позволяет производить определение расстояния до объекта с относительной погрешностью, не превышающей 10-15% за время наблюдений в проделах 100-150 с, что обеспечивается дополнительными измерениями расстояния между наблюдателем и притягивающим центром и углов направления на притягивающий центр. Оценки точности получены методом статистического имитационного моделирования при относительной погрешности измерения светового потока 3%, погрешности угловых измерений 20 уг. с и относительной погрешности определения расстояния между наблюдателем и центром притяжения 0,001%.
Источники информации, принятые во внимание
1. Инженерный справочник по космической технике// Под ред. Солодова А.В. М.: Воениздат, 1977, с.297-299, 385-388.
2. Матвеев И.Н. и др. Лазерная локация. М.: Машиностроение, 1981.
3. Патент США N 3798795, 1974.
4. Бегунов Б.Н., Заказнов Н.П. Теория оптических систем. М.: Машиностроение, 1975, с. 386.
5. Авторское свидетельство СССР N 363946, 1972.
6. Hassab J.C. Passive tracking of a moving source by a single observer in shallow water.- "J. of Sound and Vibration", 1976, 44, N 1, p. 127-145.
7. Телятников В. И. Методы и устройства для определения местоположения источников звука. // Зарубежная радиоэлектроника, 1978, N 4, с.66-86 (прототип).
Изобретение относится к информационно-измерительной технике и может быть использовано в системах навигации. Способ определения расстояния до объекта с подвижного наблюдателя заключается в том, что наблюдают за объектом из не менее трех точек траектории движения наблюдателя, измеряют и запоминают интервалы времени между наблюдениями, измеряют углы ориентации линии визирования объекта, измеряют и запоминают принимаемый от объекта поток электромагнитного излучения при каждом наблюдении, измеряют углы ориентации направления на центр притяжения, определяют расстояние между наблюдателем и центром притяжения и определяют расстояние до объекта. 2 ил.
Способ определения расстояния до объекта с подвижного наблюдателя, заключающийся в том, что наблюдают за объектом из не менее трех точек траектории движения наблюдателя, измеряют и запоминают интервалы времени между наблюдениями, измеряют углы ориентации линии визирования объекта в инерциальной системе координат и определяют расстояние до объекта, отличающийся тем, что дополнительно измеряют и запоминают принимаемый от объекта поток электромагнитного излучения при каждом наблюдении, измеряют углы между линией визирования объекта и направлением на центр тяготения в инерциальной системе координат, начало отсчета которой находится в центре тяготения по крайней мере в одной точке наблюдения, определяют расстояние между наблюдателем и центром тяготения и определяют расстояние до объекта.
| Телятников | |||
| Зарубежная радиоэлектроника | |||
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
