Предлагаемое техническое решение относится к области оптико-электронного приборостроения, в частности, но не исключительно, к нашлемным системам визирования, и может быть использовано при разработке оптико-электронных систем определения разворотов защитного шлема оператора в различных отраслях техники.
В настоящее время широко известны структурные схемы построения нашлемных визирных систем, состоящих из оптико-локационных блоков (ОЛБ), размещенных на объекте, реперного узла, представляющего собой набор дискретных разнесенных относительно друг друга источников (или приемников) излучения, определенно ориентированных относительно оси визира (линии визирования оператора), установленных на подвижном основании, электронного блока и вычислителя.
Подробно состав известных устройств и принцип их действия описан в следующих источниках:
- шлемные средства индикации и прицеливания, ВАРКТ, 1975, №3, стр.24-30;
- патенты США №3.375.375, №3.678.238, №4.193.689, Англии №1.520.154, №2.082.905.
Анализ известных устройств определения ориентации оси визира показывает, что во всех устройствах базовые оптико-локационные блоки установлены жестко на объекте, а визир с ориентированных относительно его оси реперными элементами установлен на подвижном основании, например на шлеме оператора, и перемещается в процессе работы относительно ОЛБ.
Создание такого типа устройства основано на способе дистанционного слежения за поворотом шлема оператора, а определение углов визирования заключается в определении углов пространственной ориентации оси визира при наложении визирного перекрестия на цель.
Углы определяются по известному базовому расстоянию между оптико-локационными блоками, пеленгам на реперные элементы, измеренным оптико-локационными блоками, и параметрам размещения реперных элементов относительно оси визира.
Формируемые угловые координаты выдаются в каналы потребления объекта. Такие устройства определения углов визирования требуют измерения углового направления на каждый реперный элемент подвижного основания с помощью специальных измерителей, вынесенных на определенное расстояние относительно реперных элементов и установленных на неподвижном основании.
Однако не все условия, в которых возникает необходимость определения углов пространственной ориентации оси визира, установленного на подвижном основании, например на шлеме оператора, удовлетворяют перечисленным выше требованиям. Например, такие устройства невозможно использовать для выдачи углов визирования оператором системам в полевых условиях.
К недостаткам рассматриваемых систем относятся также и другие недостатки. Наиболее существенным из них является ограничение диапазона перемещения и разворота головы оператора из-за сложности обеспечения большого поля обзора измерителей при малых габаритах исполнения устройств.
Учитывая вышеизложенное можно сделать заключение, что устранение отвлеченных выше недостатков очень актуально в настоящее время, так как значительно расширяет область применения нашлемных визирных систем, построенных на таких способах, и дает возможность использования их в различных областях техники и на различных объектах, в том числе в полевых условиях.
Наиболее близким по техническому решению к заявляемому устройству из известных аналогов является устройство угловой ориентации, описанное в материалах патента США №3.375.375. Данное устройство выбрано за прототип.
Устройство-прототип содержит блок реперных элементов (фотоприемников или излучателей) с визиром, жестко установленных на подвижном основании, например на шлеме оператора, базовый блок с двумя формирователями веерных пучков света, установленных в непосредственном близости от головы оператора, и электронный блок, установленные на неподвижном основании, например на конструкции транспортного средства.
Работа устройства осуществляется следующим образом. Два формирователя веерных пучков света сканируют пространство внутри объекта установки. При совмещении веерных пучков с любым из реперных элементов производится отсчет и обработка поступившей информации, а затем определение с помощью электронного блока значений пеленгов αi, βi на каждый реперный элемент в системе координат формирователей веерных пучков света. При этом пеленг αi измеряется первым формирователем веерных пучков света, а βi - вторым формирователем.
По измеренным пеленгам на реперные элементы αi, βi, и по известному базовому расстоянию между формирователями веерных пучков света в устройстве определяются углы разворота (ориентации) оси визира ϕy, ϕz.
Для использования устройства-прототипа необходимо наличие измерителей, установленных на неподвижном основании и вынесенных относительно подвижного основания, с размещенными на нем реперными элементами.
Однако установка неподвижной площадки в непосредственной близости от оператора и точная юстировка измерителей относительно базовой системы координат не всегда возможна в условиях все возрастающего применения нашлемных визирных устройств в различных отраслях техники. Например, определение и выдача углов визирования в полевых условиях. В таких условиях использование устройства-прототипа невозможно.
Необходимо применение иных устройств определения углов визирования, которые обуславливают совмещение угломерного устройства с местом установки визира.
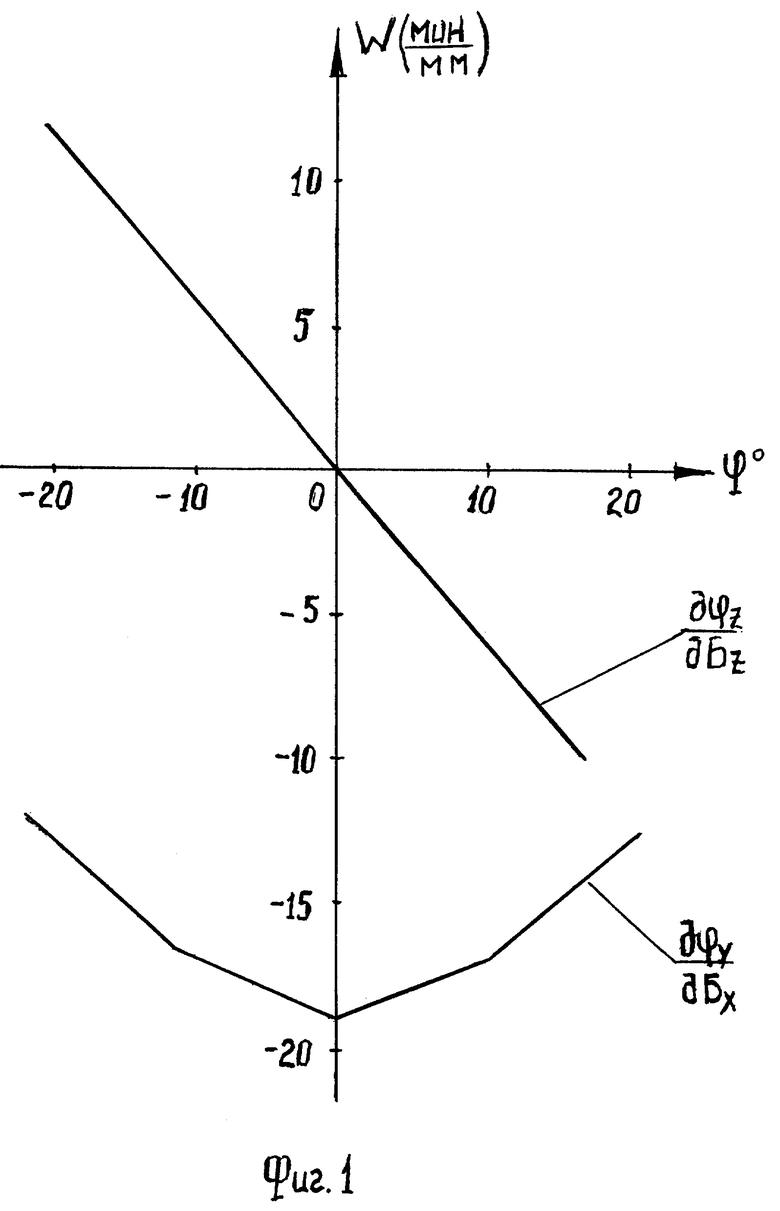
При этом следует отметить значительные статические и динамических погрешности устройства-прототипа. Возникновение статических погрешностей обусловлено наличием погрешностей угловой и линейной установки формирователей веерных пучков и реперных элементов, а также погрешностями измерения пеленгов. Изменение статических погрешностей обусловлено отклонением головы оператора от нулевой линии визирования и перемещением по заданной зоне. Для примера на Фиг.1 представлены кривые функциональной зависимости передаточных отношений  в выходные углы ϕу; ϕz, погрешностей ΔБх; ΔБz установки измерителей пеленгов на базовое расстояние в зависимости от отклонения головы оператора в горизонтальной (ϕy) и вертикальной (ϕz) плоскости базовой системы координат.
в выходные углы ϕу; ϕz, погрешностей ΔБх; ΔБz установки измерителей пеленгов на базовое расстояние в зависимости от отклонения головы оператора в горизонтальной (ϕy) и вертикальной (ϕz) плоскости базовой системы координат.
При этом ошибки выходных углов (Δϕу, Δϕz) определяются следующим образом:
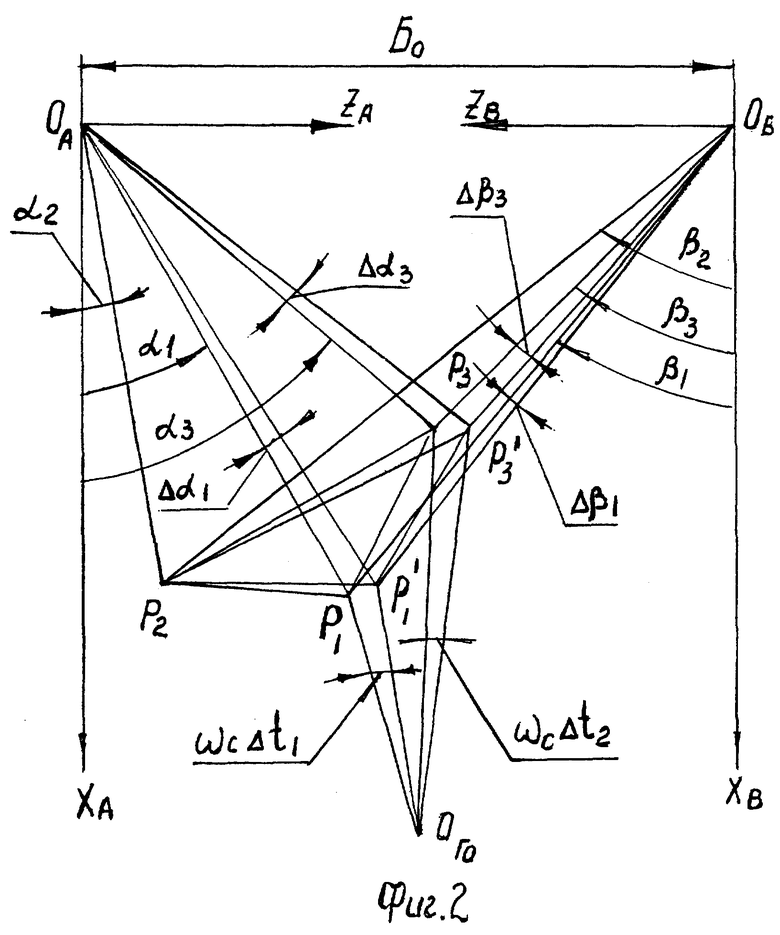
Динамические погрешности устройства-прототипа возникают в результате угловых и линейных колебаний головы оператора на объекте, а также при визировании перемещающихся относительно оператора объектов и угловой скоростью Wс во время проведения операции измерения пеленгов. Схема возникновения погрешностей устройства-прототипа показана на Фиг.2.
Из схемы Фиг.2 видно, что после измерения пеленга на реперный элемент Р2, момент измерения которого совпадает, например, с началом цикла измерения (t изм.0 = 0), оператор, голова которого осуществляет колебания относительно физиологического центра ОГ или сопровождает цель с угловой скоростью Wc, за время, проходящее до отсчета следующего пеленга (Δt1 ≠ 0) на реперный элемент Р1, разворачивается относительно физиологического центра головы на угол Wc·Δt1, т.е. измерение пеленга на реперный элемент Р1 происходит при смещении его в точку Р’I.
Аналогично происходит измерение пеленга на реперный элемент Р3 при смещении его в точку Р’3. Таким образом, при использовании устройства-прототипа за счет необходимости дистанционного измерения пеленгов на реперные элементы подвижного основания единым измерительным каналом с присущим ему смещением моментов измерения во времени, происходит искажение реального контура расположения реперных элементов (Р2 Р’1 P’3 вместо Р2 Р1 Р3), что приводит к значительным динамическим погрешностям определения углов визирования.
Расчет погрешностей показывает, что при использовании устройства-прототипа динамическая погрешность определения углов визирования в условиях сопровождения цели оператором с угловой скоростью Wc=20°/с достигает 50’ при заданной зоне линейных и угловых перемещений.
Таким образом, устройству-прототипу присущи следующие существенные недостатки:
1. Ограничение области применения в связи с необходимостью использования неподвижной площадки в непосредственной близости к подвижному основанию, т.е. проведение операции измерения пеленгов с помощью измерителей, дистанционно вынесенных относительно подвижного основания.
2. Ограничение диапазона перемещения и разворота головы оператора из-за сложности обеспечения большого поля обзора измерителей при малых габаритах исполнения устройств.
3. Значительные статические погрешности из-за увеличения передаточных отношений, определяющих углы целеуказания параметров в зависимости от увеличения угла отклонения головы оператора от нулевой линии визирования.
4. Возникновение динамических погрешностей при сопровождении цели во время измерения пеленгов на п-реперных элементов из одной точки пеленгации.
В предлагаемом изобретении решались задачи расширения области применения устройства определения ориентации оси визира в различных отраслях науки и техники с повышением точности определения углов горизонтального ϕу и вертикального ϕz визирования в статических и динамических режимах работы.
Решение поставленных задач достигается тем, что измерение параметров разворота подвижного основания производится непосредственно на самом подвижном основании вокруг трех осей системы отсчета разворота данного основания с последующим учетом измеренных параметров W″x, W″y, W″z при формировании углов визирования ϕу, ϕz в базовой системе координат в отличие от устройства-прототипа, где измерение параметров разворота подвижного основания производится с неподвижной площадки дистанционно.
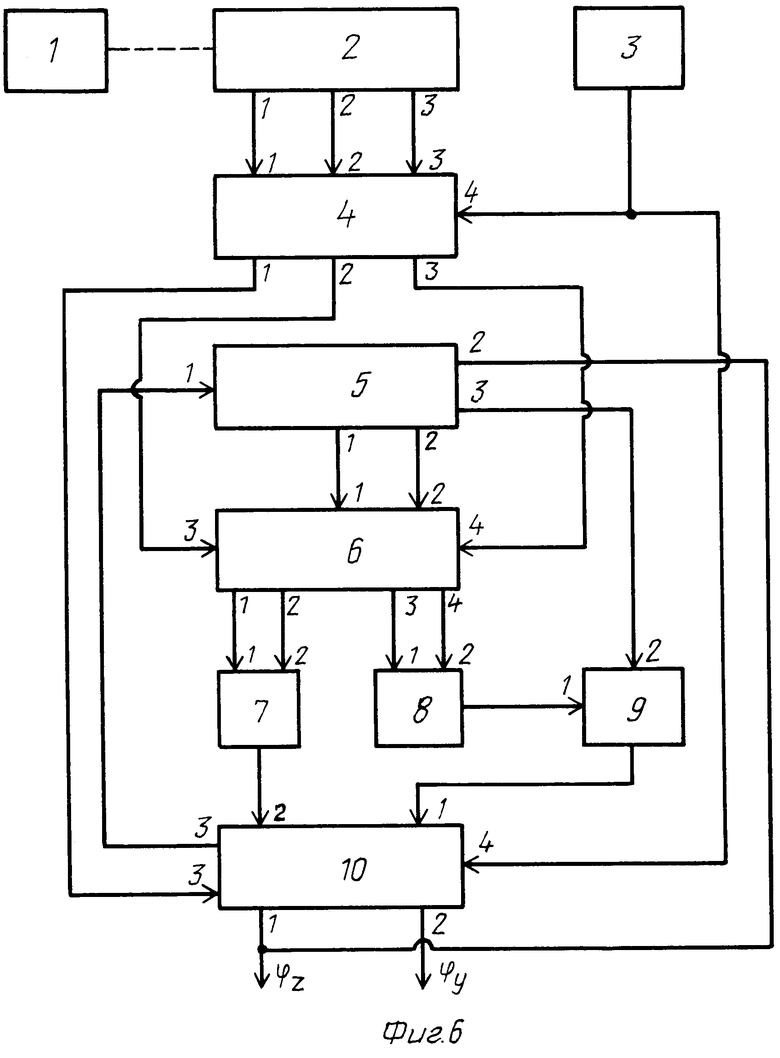
Сущность заявляемого изобретения состоит в том, что в известное устройство определения ориентации оси визира, содержащее визир, установленный на подвижном основании, например на защитном шлеме оператора, состоящие из осветителя, марки (сетки), объектива и наклонной плоскопараллельной пластины, введены блок измерения параметров разворота, блок задания начала отсчета, блок коррекции, блок нелинейных преобразований, блок умножения, первый и втором сумматоры, устройство деления и блок интеграторов, при этом блок измерения параметров разворота механически сопряжен с визиром, выход блока задания начала отсчета соединен с четвертыми входами блока коррекции и блока интеграторов, первый, второй и третий входы блока коррекции соединены соответственно с первым, вторым и третьим выходами блока измерения параметров разворота, а его второе и третий выходы соединены соответственно с третьим и четвертый входами блока умножения, первый выход блока коррекции соединен с третьим входом блока интеграторов, первый и третий выходы блока интеграторов соединены соответственно со вторым и первым входами блока нелинейных преобразовании, первый и второй выходы блока умножения соединены соответственно с первым и вторым входами первого сумматора, а его третий и четвертый выходы - соответственно с первым и вторым входами второго сумматора, первый и второй входы блока нелинейных преобразований соединены соответственно с первым и вторым входами блока умножения, второй вход устройства деления соединен с третьим выходом блока нелинейных преобразований, первый вход - с выходом второго сумматора, а его выход - с первым входом блока интеграторов, выход первого сумматора соединен со вторым входом блока интеграторов, первый и второй выходы блока интеграторов соединены с системами объекта.
Таким образом в процессе работы устройства производятся измерения величины скорости углового разворота подвижного основания относительно трех взаимно перпендикулярных осей данного основания, а углы вертикального ϕz и азимутального ϕу визирования определяются в базовой системе координат из следующих соотношений:


где: ϕх - угол кренового разворота головы оператора в связанной системе координат подвижного основания;

 ,
,  ,
,  - измеряемые скорости углового разворота подвижного основания относительно трех взаимно перпендикулярных осей связанной системы координат;
- измеряемые скорости углового разворота подвижного основания относительно трех взаимно перпендикулярных осей связанной системы координат;
tn-tn-1 - временные интервалы выполнения измерения скоростей углового разворота подвижного основания, n=1-6.
Сопоставимый анализ предлагаемого устройства и устройства-прототипа показывает, что измерения, производимые на самом подвижном основании в связанной с ним системе отсчета, устраняют промежуточные погрешности как статического (см. Фиг.1), так а динамического (см. Фиг.2) режимов работы устройства-прототипа, не требуют использования неподвижной площадки в непосредственной близости к подвижному основанию и не ограничивают перемещения подвижного основания.
Такое решение дает большой экономический эффект, т.к. расширяет область применения предлагаемого устройства в различных отраслях науки и техники при увеличении точности определения углов визирования, за счет измерения параметров угловых разворотов относительно трех осей подвижного основания и на самом подвижном основании.
Подробное описание предлагаемого устройства представлено ниже со ссылкой на чертежи, где представлена следующая информация:
Фиг.1 - функциональная зависимость передачи погрешности установки измерителей пеленгов на базовое Б0 расстояние (ΔБх; ΔБz) в выходные углы, определяемые в устройстве-прототипе (ϕу, ϕz).
Фиг.2 - схема возникновения погрешностей динамического режима в устройстве-прототипе.
Фиг.3 - Фиг.5 - схемы преобразования измеряемых параметров углового разворота относительно трех осей подвижного основания в базовую систему координат.
Фиг.6 - Фиг.13 - схемы технической реализации предлагаемого устройства.
На чертежах приняты следующие обозначения
OXYZ - базовая система координат;
ϕy, ϕz - углы визирования в базовой системе координат;
 - системы отсчета пеленгов на реперные элементы, измеряемые из точек ОА и ОВ в устройстве-прототипе;
- системы отсчета пеленгов на реперные элементы, измеряемые из точек ОА и ОВ в устройстве-прототипе;
αi, βi, - угловые значения пеленгов на реперные элементы, измеряемые из точек OA и OB в устройстве-прототипе;
Δαi, Δβi, - погрешности измерения угловых значений пеленгов на реперные элементы в устройстве-прототипе;
Pi - реперные элементы устройства-прототипа;
Б0 - базовое расстояние между формирователями веерных пучков;
ΔБх, ΔБz - погрешности установки формирователей верхних пучков в базовой системе координат;
Δt1 - временной интервал между моментами измерения пеленгов на реперные элементы Р1 и Р2 в устройстве-прототипе;
Δt2 - временной интервал между моментами измерения пеленгов на реперные элементы P3 и Р2 в устройстве-прототипе;
Wc - угловая скорость сопровождения цели операторов:

 - точки текущего положения реперных элементов Р1, Р3 по истечении времени Δt1, Δt2 соответственно при сопровождении цели оператором;
- точки текущего положения реперных элементов Р1, Р3 по истечении времени Δt1, Δt2 соответственно при сопровождении цели оператором;
OXu Yu Zu - система отсчета при измерении параметров разворота подвижного основания;
OXГ YГ ZГ - систем разворота подвижного основания;
 - текущие положения системы разворота подвижного основания при визировании цели;
- текущие положения системы разворота подвижного основания при визировании цели;
 ,
,  ,
,  - измеряемые скорости углового разворота подвижного основания относительно трех взаимно перпендикулярных осей связанной системы координат соответственно;
- измеряемые скорости углового разворота подвижного основания относительно трех взаимно перпендикулярных осей связанной системы координат соответственно;
Wyг2, Wzг2 - скорости разворота подвижного основания относительно текущих осей ОУГ2; ОZГ2;
ϕХ - угол кренового разворота головы оператора в связанной системе координат подвижного основания.
В предлагаемом устройстве определяют ориентацию оси визира. установленного на подвижном основании, в базовой системе координат в результате измерения параметров углового разворота подвижного основания относительно трех осей связанной с ним системы:
 ,
,  ,
, 
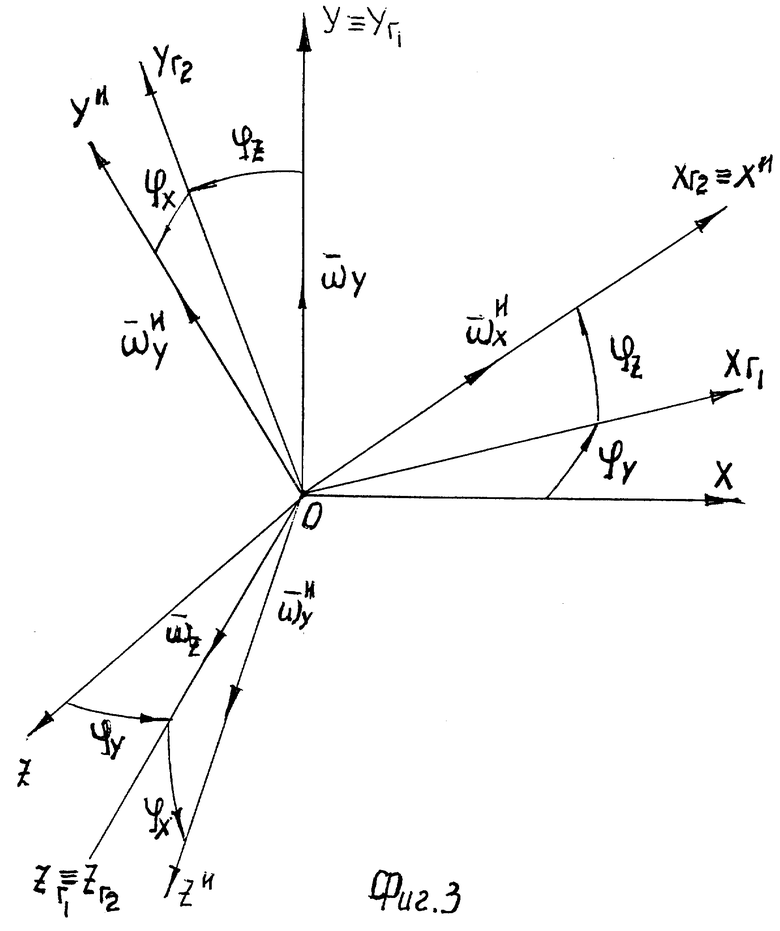
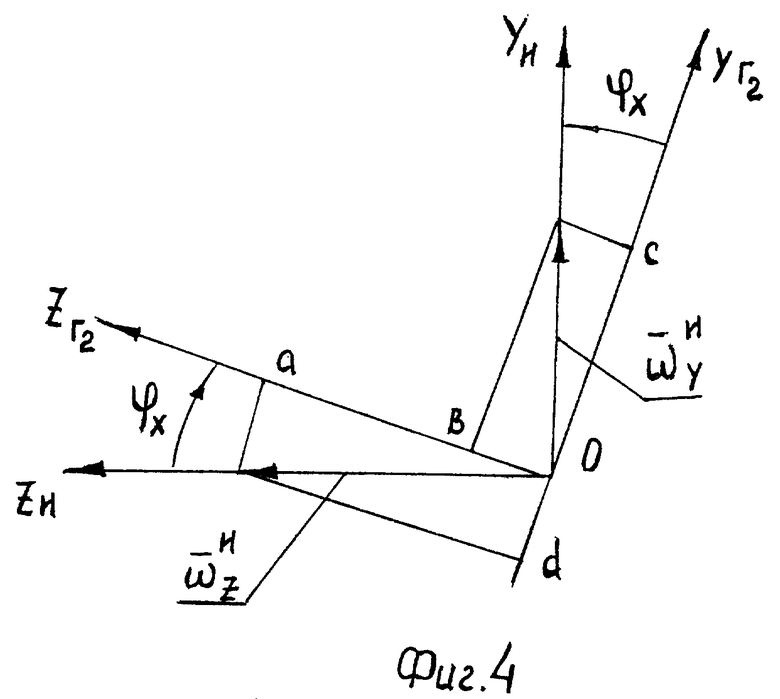
Операции измерения параметров углового разворота подвижного основания в связанной системе координат и формирование углов вертикального ϕz и азимутального ϕу визирования в базовой системе координат наглядно показано на схемах преобразования, представленных на Фиг.3-Фиг.5.
Как видно из схемы Фиг.3 измерение параметров углового разворота подвижного основания производится в связанной системе координат OXu Yu Zu по следующим величинам:
 - угловая скорость относительно оси ОХu;
- угловая скорость относительно оси ОХu;
 - угловая скорость относительно оси ОУu;
- угловая скорость относительно оси ОУu;
 - угловая скорость относительно оси OZu.
- угловая скорость относительно оси OZu.
Для определения углов визирования ϕу, ϕz в базовой системе координат OXУZ необходимо привести измеряемые угловые скорости в связанной системе координат ( ,
,  ,
,  ) к базовой системе координат.
) к базовой системе координат.
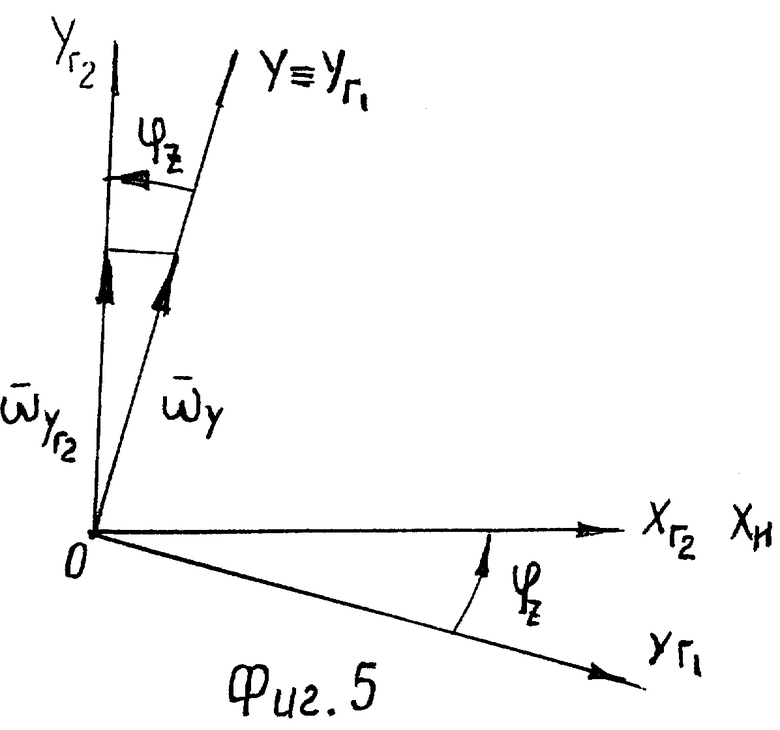
В соответствии со схемами, представленными на Фиг.3-Фиг.5, такое преобразование можно провести следующим образом:


где ϕх - угол кренового разворота головы оператора в связанной системе координат

Wyг2, Wzг2 - скорости разворота подвижного основания относительно текущих осей ОУГ2; ОZГ2.
Угол вертикального визирования ϕz определяется в результате интегрирования уравнения (4)

Для определения азимутального угла в базовой системе координат необходимо еще провести дополнительное преобразование в соответствия со схемой Фиг.5

Таким образом, углы вертикального ϕz и азимутального визирования ϕу определяются в базовой системе координат свободного пространства, связанного с Землей.
При этом отсчет времени интегрирования t производится от нулевого положения линии визирования до момента наложения перекрестия на цель.
В случае дальнейшего сопровождения цели - отсчет времени интегрирования продолжается.
Работу предложенного устройства рассмотрим на примере схемного построения, представленного на Фиг.6,
где 1 - визир;
2 - блок измерения параметров разворота;
3 - блок задания начала отсчета;
4 - блок коррекции;
5 - блок нелинейных преобразовании;
6 - блок умножения;
7, 8 - первый и втором сумматоры;
9 - устройство деления;
10 - блок интеграторов.
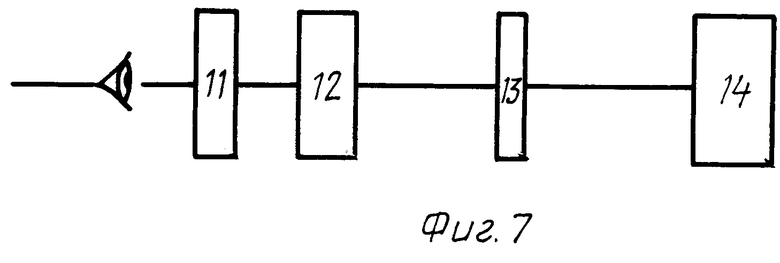
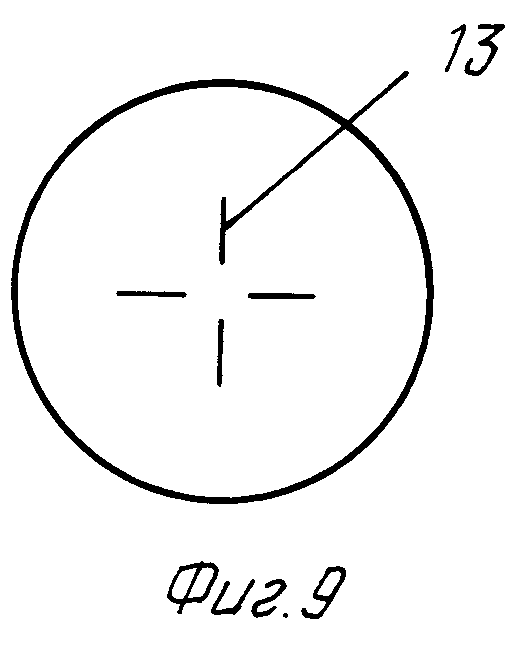
Визир 1 представляет собой оптический коллиматорный формирователь, обеспечивающий вывод в поле зрения оператора изображения визирной метки, например креста (см. Фиг.9).
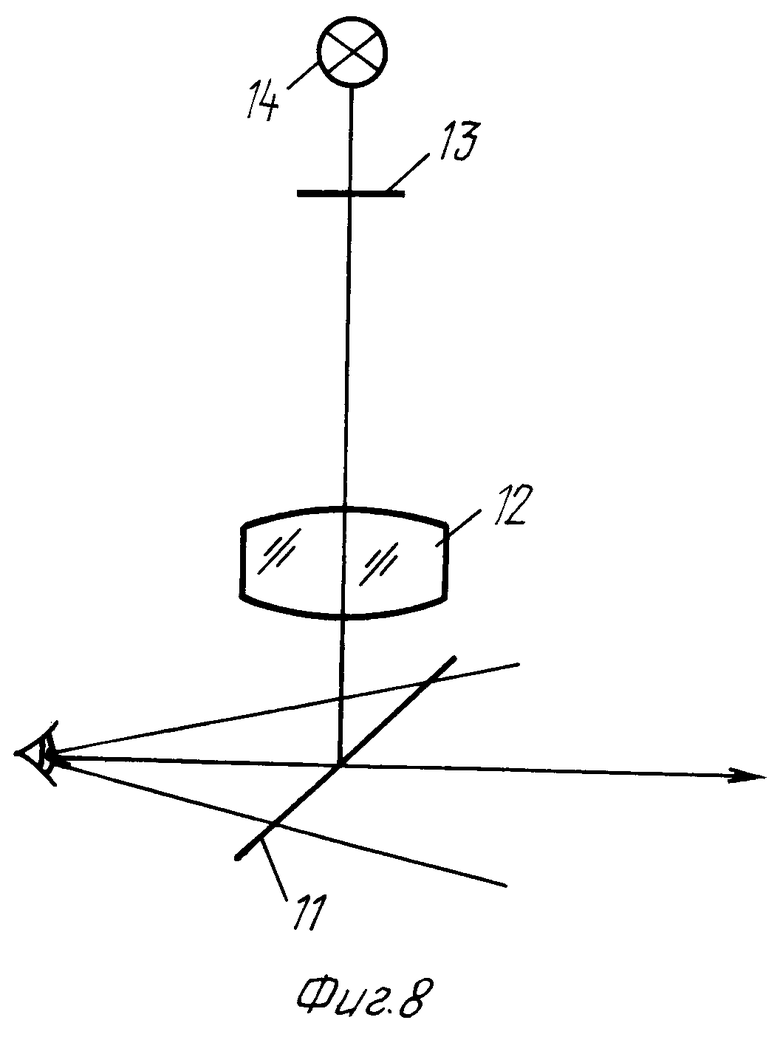
Содержит визир (см. Фиг.7) расположенные на нулевой линии визирования глаза оператора наклонную полупрозрачную пластину 11, входной объектив 12, выполненный, например, в виде линзового объектива.
В фокальной поверхности объектива размещена марка-сетка 13, выполненная, например, на стекле или металле в виде прозрачного перекрестия на темном фоне. Марка-сетка освещается источником излучения 14. Она может быть выполнена на стекле или металле в виде прозрачного перекрестия на темном фоне.
При формировании нулевой линии визирования свет от источника излучения 14 проходит через марку-сетку 13 и попадает в объектив 12. Далее свет отражается от наклонной полупрозрачной пластины 11 и попадает в глаз оператора в виде коллимированного излучения. Таким образом в поле зрения оператора формируется изображение визирной метки в виде перекрестия (см. Фиг.9).
Блок измерения параметров разворота 2 состоит, например, из трех датчиков угловых скоростей (ДУС), жестко ориентированных относительно трех соответствующих осей защитного шлема.
В качестве ДУС могут быть применены, в частности, но не исключительно, малогабаритные датчики типа ТВК.
Блок задания начала отсчета 3 выполнен, например, в виде коммутирующей кнопки типа КМ1-l, обеспечивающей формирование (при нажатии) команды СБРОС (в виде потенциала).
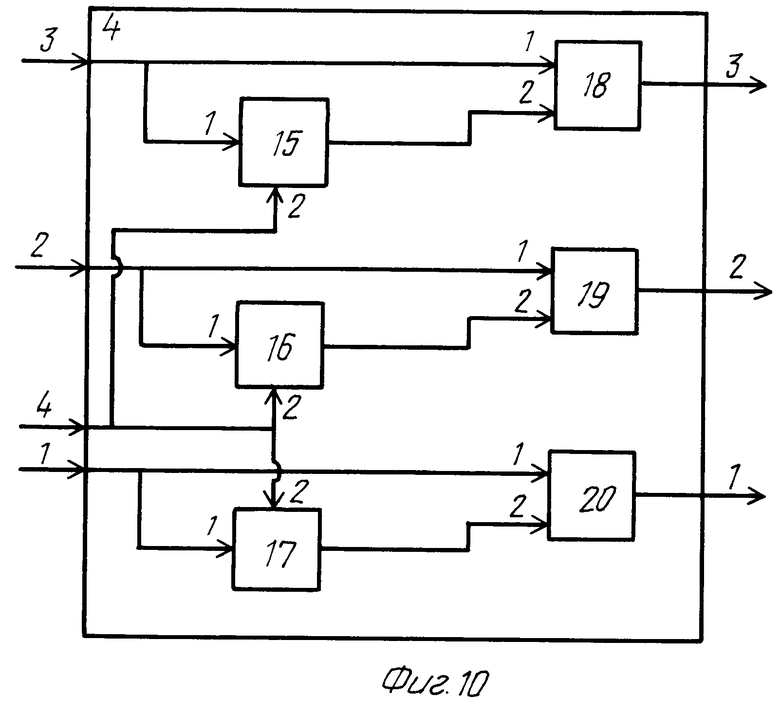
Блок коррекций 4 состоит (см. Фиг.10) из трех каналов коррекции выходных сигналов ДУС блока измерения параметров разворота 2, где:
15-17 - запоминающие устройства, выполненные, например, по схеме, представленной в разделе 4-5-3 [1];
18-20 - суммирующие усилители, выполненные, например, по схеме, представленной на рис.3.18 [2] (используются два входа усилителя, третий вход заземляется).
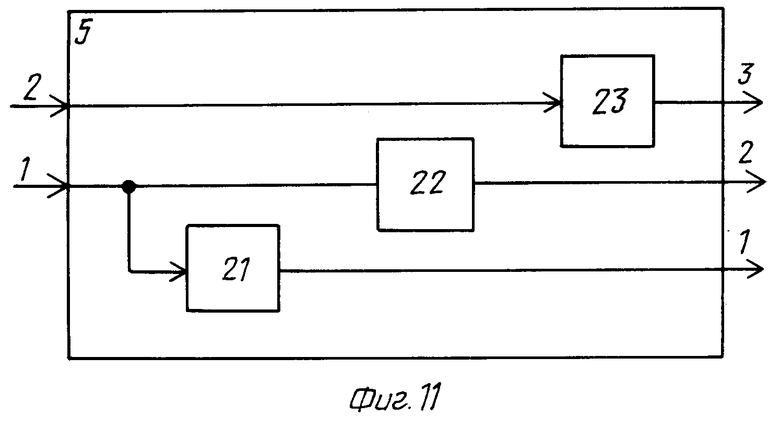
Блок нелинейных преобразований 5 состоит (см. Фиг.11) из трех каналов преобразования, где:
21 - преобразователь функции sin ϕx;
22-23 - преобразователи функций соответственно cosϕx и cos ϕz.
Преобразователи функции cos могут быть выполнены, например, по схеме, представленной на рис. В раздела 2-11-3 [1], преобразователи функции sin - по схеме, представленной на рис.Б раздела 2-11-8 [1].
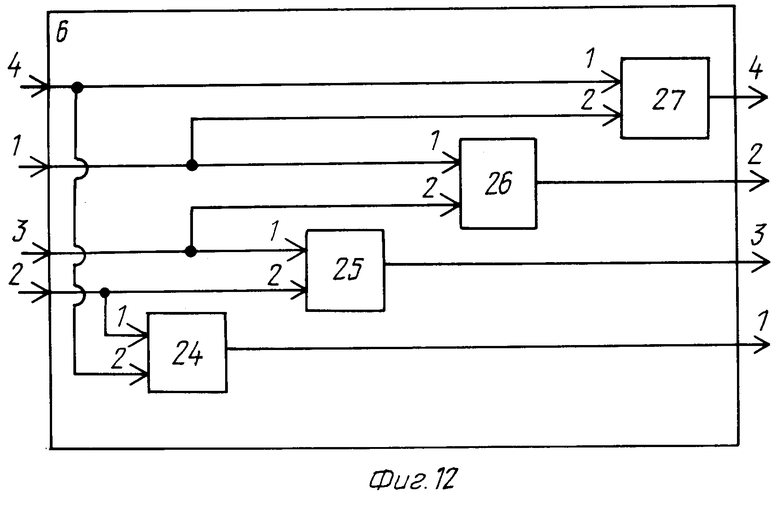
Блок умножения 6 состоит (см. Фиг.12) из четырех множительных устройств 24-17, которые могут быть выполнены, например, по схеме, представленной на рис. 4.8 "а" [2].
Сумматоры 7 и 8 могут быть выполнены, например, по схемам, соответственно представленным на рис. 3.18 и рис.3.17 [3].
Устройство деления 9 может быть выполнено, например, по схеме, представленной на Фиг.4.8 "б" [2].
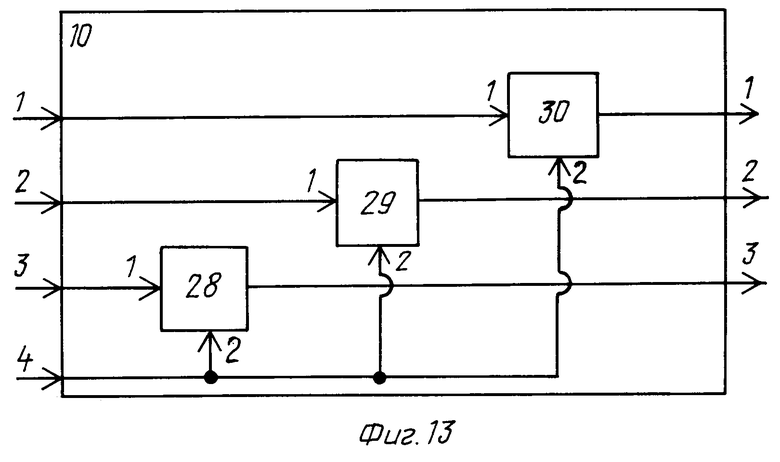
Блок интеграторов 10 содержит (см. Фиг.13) три интегратора 28-30, которые могут быть выполнены, например, по схеме, представленной на рис.3.44 а [3].
Визир 1 и блок измерения параметров разворота 2 размещаются на защитном шлеме оператора. Их системы координат взаимно соориентированы.
Остальные блоки устройства размещаются на объекте.
Работа устройства происходит следующим образом. В начале рабочего цикла оператор производит совмещение систем координат предлагаемого устройства с системой координат объекта, для чего он разворотом головы ориентирует линию визирования (ось визира) на реперный элемент объектива, задающий направление отсчета углов визирования, и нажимает кнопку блока задания начала отсчета.
Ориентация оси визира производится путем совмещения перекрестия визира (см. Фиг.9) с перекрестием реперного элемента объекта.
По нажатию кнопки блока задания начала отсчета на его выходе формируется команда СБРОС (в виде потенциала), которая поступает на четвертые входы блока коррекции и блока интеграторов. При этом запоминающие устройства 15-17 блока коррекции (см. Фиг.10) переводятся в режим записи входного сигнала (команда СБРОС поступает на 2-е входы запоминающих устройств).
Входными сигналами запоминающих устройств (входы 1) являются выходные сигналы угловых скоростей Wy, Wx Wz блока измерения параметров разворота (выходы 1-3), которые поступают соответственно на 1-3 входы блока коррекции.
По команде СБРОС (вторые входы) интеграторы 28-30 (Фиг.13) переводятся в режим установки начальных условий (в данном случае обнуления).
После снятия команды СБРОС (кнопки блока задания начала отсчета отпущена) запоминающие устройства 15-17 блока коррекции переводятся в режим хранения. Их инверсные выходные сигналы поступают на вторые входы суммирующих усилителей 18-20.
На первые входы этих усилителей поступают сигналы угловых скоростей блока измерения параметров разворота.
Алгебраическое суммирование выходных сигналов Wy, Wx и Wz блока измерения параметров разворота с заполненными инверсными значениями этих же сигналов приводит к устранению (списанию) на момент отпускания кнопки блока задания начала отсчета погрешностей измерителей угловых скоростей, обусловленных, например, временным и температурным дрейфами.
Интеграторы 28-30 (Фиг.13) блока интеграторов 10 после снятия команды СБРОС устанавливаются в режим интегрирования.
Таким образом, устройство подготовлено к режиму измерения ориентации оси визира.
Оператор поворотом головы совмещает линию визирования (перекрестие, наблюдаемое в поле зрения) с интересующим его объектом наблюдения и удерживает ее на нем.
Сигнал угловой скорости  (скорректированный) с 1го выхода блока коррекции 4 поступает на 3й вход блока интеграторов 10, где вычисляется угол кренового разворота головы оператора по формуле
(скорректированный) с 1го выхода блока коррекции 4 поступает на 3й вход блока интеграторов 10, где вычисляется угол кренового разворота головы оператора по формуле

С 3го выхода блока интеграторов 10 (интегратор 20) сигнал ϕх поступает на 1й вход блока нелинейных преобразований 5, где на преобразователях 21 и 22 (Фиг.11) преобразуется соответственно в сигналы sin ϕx (1й выход) и cos ϕx (2й выход), которые поступают на 1й (sin ϕx) и 2й (cos ϕx) входы блока умножения 6.
На 3й и 4й входы блока умножения 6 поступают сигналы  и
и  соответственно с выходов 1 и 3 блока коррекции 4.
соответственно с выходов 1 и 3 блока коррекции 4.
На множительных устройствах 24 и 25 (Фиг.12) выполняются операции умножения сигнала cos ϕx на  и cos ϕx на
и cos ϕx на  соответственно.
соответственно.
На множительных устройствах 26 и 27 выполняются операции умножения сигнала sin ϕx на  и sin ϕx на
и sin ϕx на  соответственно.
соответственно.
Выходные сигналы блока умножения 6  cos ϕx (1й выход) и
cos ϕx (1й выход) и  sin ϕх (2й выход) поступают соответственно на 1й и 2й входы сумматора 7.
sin ϕх (2й выход) поступают соответственно на 1й и 2й входы сумматора 7.
Сумматорный сигнал  cos ϕx +
cos ϕx +  sin ϕх с выхода сумматора 7 поступает на 2й вход блока интеграторов 10, где на интеграторе 29 производится вычисление вертикального угла ориентации оси визира ϕ по формуле
sin ϕх с выхода сумматора 7 поступает на 2й вход блока интеграторов 10, где на интеграторе 29 производится вычисление вертикального угла ориентации оси визира ϕ по формуле

С 1го выхода блока интеграторов 10 вычисленное значение сигнала ϕz поступает на 2й вход блока нелинейных преобразований 5, где на преобразователе 23 преобразуется в сигнал cos ϕz, который с 3го выхода блока поступает на 2й вход устройства деления 9.
На сумматоре 8 производится алгебраическое сложение сигналов  cos ϕx (поступает на 1 вход с 3го выхода блока умножения 6) и
cos ϕx (поступает на 1 вход с 3го выхода блока умножения 6) и  sin ϕх (поступает на 2й вход с 4го выхода блока умножения 6).
sin ϕх (поступает на 2й вход с 4го выхода блока умножения 6).
С выхода сумматора 8 сигнал сложения поступает на 1й вход устройства деления 9, где производится его деление на сигнал cos ϕz.
Выходной сигнал устройства деления 9 поступает на 1й вход блока интеграторов 10, где на интеграторе 30 производится вычисление горизонтального утла ориентации линии визирования (оси визира) по формуле:
С выхода блока интеграторов 10 вычисленные значения углов ϕz (выход 1) и ϕу (выход 2) поступают в бортовые системы объекта.
Анализ работы предложенного устройства показывает, что создание таких устройств не предусматривает использование неподвижных юстируемых площадок, вынесенных относительно подвижного основания и расположенных в непосредственной его близости, как в устройстве-прототипе для обеспечения дистанционного расположения измерителей, определяющих пеленги на реперные элементы подвижного основания.
Отсутствие неподвижной юстируемой площадки в предлагаемом устройстве дает большие преимущества по применению в различных областях техники, так как устройства такого типа не зависят от расположения отдельных блоков на объектах из-за создания единого визирно-измерительного блока, устанавливаемого на подвижном основании, например на шлеме оператора.
При этом следует отметить, что присущие устройству-прототипу систематические погрешности при работе в статических и динамических режимах, которые обусловлены наличием промежуточных звеньев при дистанционном способе определения углов целеуказания, полностью отсутствуют при осуществлении непосредственного измерения параметров разворота подвижного основания.
Таким образом, использование предлагаемого устройства по сравнению с прототипом дает большой экономические эффект, т.к. обуславливает расширение области применения и повышение точности определения углов визирования в статических и динамических режимах работы за счет одновременного визирования в результате разворота подвижного основания и непосредственного измерения разворотов относительно трех взаимно-перпендикулярных осей данного основания с последующим формированием углов вертикального и азимутального визирования в базовой системе координат.
Выполнение измерения параметров углового разворота подвижного основания (защитного шлема оператора), выполняемых на самом подвижном основании, дает возможность работы предлагаемому устройству определения ориентации оси визира как на неподвижных объектах, так и на подвижных транспортных средствах.
Перечень использованной литературы
1. И.М.Тетельбаум, Ю.Р.Шнейдер "400 схем для АВМ″, Москва, "Энергия", 1973 г.
2. B.C.Гутников "Интегральная электроника в измерительных устройствах", 2е издание, Ленинград, "Энергоатомиздат", Ленинградское отделение, 1988 г.
3. П.Хоровиц, У.Хилл "Искусство схемотехники", том I, Москва, Мир", 1986 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЮСТИРОВКИ НАШЛЕМНОЙ СИСТЕМЫ ВИЗИРОВАНИЯ | 2002 |
|
RU2251720C2 |
| СПОСОБ ЛОКАЦИИ ИСТОЧНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2275652C2 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ НА ЕЕ ОСНОВЕ | 2017 |
|
RU2674533C1 |
| СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2216705C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| КОЛЛИМАТОРНЫЙ ВИЗИР | 2001 |
|
RU2227926C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ НАШЛЕМНОЙ СИСТЕМОЙ ЦЕЛЕУКАЗАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2266508C2 |
| Двухосная стабилизация изображения на подвижном основании без ограничения углов прокачки | 2023 |
|
RU2833345C1 |
| Способ оценивания по реперным точкам угловых и пространственных координат объекта в оптико-электронной системе позиционирования | 2019 |
|
RU2720076C1 |
Изобретение относится к области оптико-электронного приборостроения и может быть использовано при разработке оптико-электронных систем определения разворотов защитного шлема оператора в различных отраслях техники. Устройство включает визир, блок измерения параметров разворота, блок задания начала отсчета, блок коррекции, блок нелинейных преобразований, блок умножения, первый и второй сумматоры, устройство деления, блок интеграторов. Визир и блок измерения параметров разворота размещены на защитном шлеме оператора. Визир представляет собой оптический коллиматорный формирователь и содержит расположенные на нулевой линии визирования глаза оператора наклонную полупрозрачную пластину, входной объектив. В фокальной поверхности объектива размещена марка-сетка. Она освещается источником излучения. Визир обеспечивает вывод в поле зрения оператора изображения визирной метки. Технический результат - расширение области применения и повышение точности определения углов визирования за счет одновременного визирования в результате разворота подвижного основания и непосредственного измерения разворотов относительно трех взаимноперпендикулярных осей данного основания с последующим формированием углов вертикального и азимутального визирования в базовой системе координат. 13 ил.
Устройство определения ориентации оси визира, содержащее визир, установленный на подвижном основании, например на защитном шлеме оператора, состоящий из осветителя, марки (сетки), объектива и наклонной плоскопараллельной пластины, отличающееся тем, что в него введены блок измерения параметров разворота, блок задания начала отсчета, блок коррекции, блок нелинейных преобразований, блок умножения, первый и второй сумматоры, устройство деления и блок интеграторов, при этом блок измерения параметров разворота механически сопряжен с визиром, выход блока задания начала отсчета соединен с четвертыми входами блока коррекции и блока интеграторов, первый, второй и третий входы блока коррекции соединены соответственно с первым, вторым и третьим выходами блока измерения параметров разворота, а его второй и третий выходы соединены соответственно с третьим и четвертым входами блока умножения, первый выход блока коррекции соединен с третьим входом блока интеграторов, первый и третий выходы блока интеграторов соединены соответственно со вторым и первым входами блока нелинейных преобразований, первый и второй выходы блока умножения соединены соответственно с первым и вторым входами первого сумматора, а его третий и четвертый выходы - соответственно с первым и вторым входами второго сумматора, первый и второй входы блока нелинейных преобразований соединены соответственно с первым и вторым входами блока умножения, второй вход устройства деления соединен с третьим выходом блока нелинейных преобразований, первый вход - с выходом второго сумматора, а его выход - с первым входом блока интеграторов, выход первого сумматора соединен со вторым входом блока интеграторов, первый и второй выходы блока интеграторов соединены с системами объекта.
| US 3375375 А, 26.03.1968.GB 2309842 Al, 06.06.1997.US 4193689, 18.03.1980.US 4111555, 05.09.1978.SU 1827136 A3, 10.03.1996. |

