Изобретение относится к области информационно- измерительной техники и преимущественно может быть использовано в системах навигации.
Известны способы определения расстояния до объекта с помощью активных лазерных или радиолокаторов /1-3/, заключающиеся в формировании и направлении на объект зондирующего электромагнитного излучения, приеме отраженного от объекта излучения, преобразовании его в электрический сигнал, измерении сдвига фаз между зондирующим и отраженным сигналами и определении на основании последнего расстояния до объекта.
Недостатком указанных способов является необходимость формирования зондирующего сигнала, что требует прецизионного наведения на объект формирователя зондирующего сигнала и приводит к существенным энергопотреблению, массе и габаритам при реализации системы.
Известны способы определения расстояния до объекта /4-5/, которые заключаются в приеме собственного или отраженного оптического излучения объекта с помощью двух оптических систем, разнесенных в пространстве на известное расстояние (базу), формировании в фокальных плоскостях этих оптических систем изображений объекта, которые оказываются на различных расстояниях от оптической оси, определении линейного и затем углового параллакса и определении расстояния до объекта по полученным значениям базы и углового параллакса.
Недостатками указанных способов являются ограниченный диапазон измеряемых расстояний и необходимость разнесения на определенное расстояние оптических систем, что увеличивает габариты системы.
Известен способ определения расстояния до подводного источника звука /6/, заключающийся в приеме прямого и отраженных от водной поверхности и дна сигналов источника звука, определении времени задержки отраженных сигналов по отношению к прямому, измерении расстояний от приемника звука до водной поверхности и дна и определении расстояния до источника звука.
Недостатками указанного способа являются низкая точность и сложность определения расстояния при многолучевом отражении, что связано с немонотонным характером зависимости скорости звука от глубины, отсутствия данных о топографии дна и нелинейной связи между временем распространения звука и горизонтальным расстоянием от источника звука.
Известен способ определения расстояния до источника звука /7/, заключающийся в измерении значений давления звука в точках приема, углов направления движения приемника звука в точках приема, углов направления на источник звука, изменении скорости и направления движения приемника звука, скоростей движения приемника звука в точках приема и определении расстояния.
Недостатками указанного способа являются необходимость изменения скорости и направления движения приемника звука и низкая точность определения расстояния при неравномерном и непрямолинейном движении источника звука.
Наиболее близким по технической сущности к предлагаемому изобретению следует считать способ определения расстояния до объекта с подвижного наблюдателя /8/, сущность которого заключается в следующем:
- наблюдают за объектом по меньшей мере из трех точек траектории движения наблюдателя;
- измеряют и запоминают интервалы времени между наблюдениями,
- измеряют и запоминают принимаемый поток электромагнитного излучения от объекта в точках наблюдения;
- измеряют и запоминают углы ориентации линии визирования объекта в инерциальной системе координат по крайней мере в одной точке наблюдения;
- измеряют углы направления на центр притяжения в инерциальной системе координат по крайней мере в одной точке наблюдения;
- определяют расстояние между наблюдателем и центром притяжения по крайней мере в одной точке наблюдения;
- определяют расстояние до объекта.
Недостатком прототипа является низкая точность определения расстояния в случае больших угловых скоростей линии визирования объекта.
Сущность предлагаемого способа определения расстояния до объекта с подвижного наблюдателя заключается в следующем:
- наблюдают за объектом по меньшей мере из трех точек траектории движения наблюдателя;
- измеряют и запоминают интервалы времени между наблюдениями;
- измеряют и запоминают принимаемый поток электромагнитного излучения от объекта в точках наблюдения;
- измеряют и запоминают углы ориентации линии визирования объекта в инерциальной системе координат в точках наблюдения;
- измеряют углы направления на центр притяжения по крайней мере в одной точке наблюдения;
- определяют расстояние между наблюдателем и центром притяжения по крайней мере в одной точке наблюдения;
- определяют угловую скорость линии визирования объекта,
- на основании информации об условиях взаимного движения объектов рассчитывают пороговое значение для угловой скорости линии визирования;
- сравнивают полученное значение угловой скорости линии визирования с рассчитанным пороговым значением;
- если значение угловой скорости линии визирования меньше порогового значения, определяют расстояние до объекта на основании результатов измерения принимаемого от него потока электромагнитного излучения;
- если значение угловой скорости линии визирования превышает или равно пороговому значению, дополнительно наблюдают за объектом по меньшей мере из двух точек траектории движения наблюдателя, измеряют и запоминают интервалы времени между наблюдениями, измеряют и запоминают углы ориентации линии визирования объекта в инициальной системе координат в точках наблюдения и определяют расстояние на основании результатов измерения углов ориентации линии визирования объекта.
Следовательно, к отличительным признакам предлагаемого способа определения расстояния до объекта с подвижного наблюдателя относится то, что при каждом наблюдении определяют угловую скорость линии визирования объекта, рассчитывают пороговое значение для угловой скорости линии визирования объекта, сравнивают полученное значение угловой скорости линии визирования с рассчитанным пороговым значением, если значение угловой скорости линии визирования объекта меньше порогового значения, определяют расстояние до объекта на основании результатов измерений электромагнитного потока, принимаемого от объекта, если значение угловой скорости линии визирования превышает или равно пороговому значению, дополнительно наблюдают за объектом по меньшей мере из двух точек траектории движения наблюдателя, определяют расстояние до объекта на основании результатов измерений углов ориентации линии визирования объекта.
Указанные отличительные признаки в известных аналогах не обнаружены. Поскольку данная совокупность отличительных признаков не может служить самостоятельным способом определенного назначения, дополнительная классификация данного способа в отношении его отличительных признаков невозможна. Ввиду того, что в предлагаемом способе для определения расстояния используются результаты измерения углов ориентации линии визирования объекта по крайней мере в трех точках траектории, определяется угловая скорость линии визирования объекта, рассчитывается значение порога для угловой скорости линии визирования объекта и производится сравнение значений порога и угловой скорости линии визирования объекта, определение расстояния в зависимости от условий взаимного движения производится на основании результатов измерений электромагнитного потока, принимаемого от объекта, либо, после проведения дополнительных измерений, на основании результатов измерений углов ориентации линии визирования объекта, что приводит к повышению точности определения дальности при больших угловых скоростях линии визирования объекта. Отмеченное свидетельствует о существенности отличительных признаков предлагаемого способа.
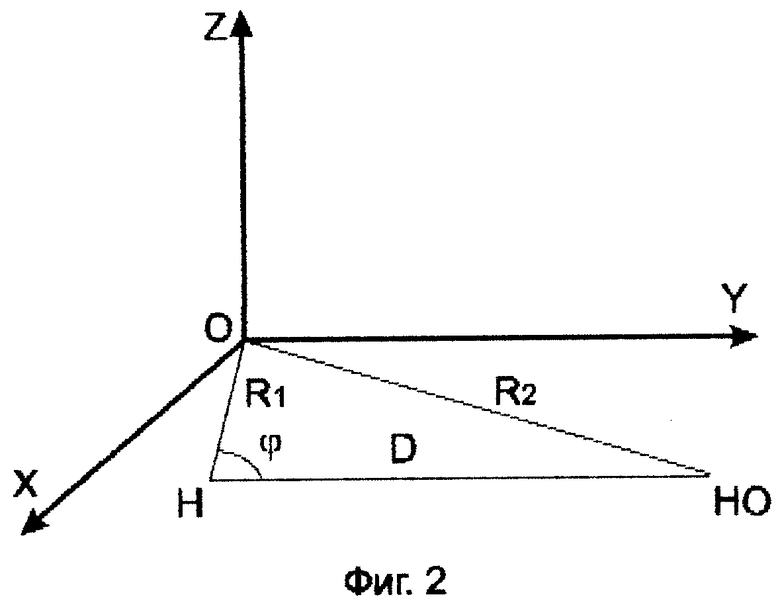
Сущность изобретения поясняется чертежом, где на фиг. 1 представлена структурная схема устройства, реализующего предлагаемый способ определения расстояния, а на фиг.2 - схема пространственного расположения наблюдателя и объекта наблюдения.
Техническая реализация предлагаемого способа определения расстояния до объекта с подвижного наблюдателя с помощью пассивных оптико-электронных средств может быть осуществлена устройством, структурная схема которого представлена на фиг. 1, где 1 - визир, 2 - блок измерения амплитуды сигнала, 3 - блок запоминания амплитуды сигнала, 4 - блок измерения угловых координат, 5 - блок запоминания угловых координат, 6 - блок определения направления на центр притяжения, 7 - блок определения расстояния между наблюдателем и центром притяжения, 8 - блок синхронизации и измерения времени, 9 - блок запоминания времени, 10 - вычислительный блок.
В устройстве последовательно соединены визир 1, блок 2 измерения амплитуды сигнала и блок 3 запоминания амплитуды сигнала, выход которого соединен с первым входом вычислительного блока 10. Блок 4 измерения угловых координат через блок 5 запоминания угловых координат подключен ко второму входу вычислительного блока 10. Блок 6 определения направления на центр тяготения подключен к третьему входу вычислительного блока 10. Блок 7 определения расстояния до центра тяготения подключен к четвертому входу вычислительного блока 10. Блок 8 синхронизации и измерения времени через блок 9 запоминания времени подключен к пятому входу вычислительного блока 10. Выход визира 1 соединен с первым входом блока 4 измерения угловых координат. Второй выход блока 8 синхронизации и измерения времени соединен со входами визира 1, блока 6 определения направления на центр тяготения, блока 7 определения расстояния между наблюдателем и центром тяготения, со вторыми входами блока 2 измерения амплитуды сигнала, блока 3 запоминания амплитуды сигнала, блока 4 измерения угловых координат, блока 5 запоминания угловых координат.
Устройство работает следующим образом. Синхронизируемый сигналами с блока 8 синхронизации и измерения времени визир 1 осуществляет прием электромагнитного излучения от объекта и преобразует его в электрический сигнал. По синхронизирующим сигналам с блока 8 синхронизации и измерения времени блок 4 измерения угловых координат выполняет измерение угловых приборных координат объекта, например, путем анализа временных параметров сигнала объекта, поступающего с визира 1. Результаты измерения заносятся в блок 5 запоминания угловых координат, синхронизируемый блоком 8 синхронизации и измерения времени. Блок 2 измерения амплитуды сигнала, синхронизируемый блоком 8 синхронизации и измерения времени, выполняет оценку принимаемого визиром 1 потока электромагнитного излучения от объекта путем измерения амплитуды сигнала. Результаты измерения заносятся в блок 3 запоминания амплитуды сигнала, синхронизируемый блоком 8 синхронизации и измерения времени. Значения интервалов времени между наблюдениями из блока 8 синхронизации и измерения времени заносятся в блок 9 запоминания времени. Одновременно вычислительный блок 10 на основании априорной информации об условиях взаимного движения наблюдателя и объекта наблюдения рассчитывает пороговое значение для угловой скорости линии визирования наблюдаемого объекта, например, согласно выражению
где  пороговое значение модуля угловой скорости линии визирования наблюдаемого объекта;
пороговое значение модуля угловой скорости линии визирования наблюдаемого объекта;
h - априорное значение начального промаха;
Vs - скорость сближения объектов;
Δt - мерный интервал;
d - априорное значение расстояния до объекта;
σα - среднеквадратичная погрешность измерения углов ориентации линии визирования объекта наблюдения;
σE - относительная среднеквадратичная погрешность измерений освещенности.
Блок 6 определения направления на центр притяжения, синхронизируемый сигналом начала отсчета с блока 8 синхронизации и измерения времени, выполняет измерение углов ориентации направления на центр притяжения. Блок 7 определения расстояния между наблюдателем и центром притяжения 6, синхронизируемый сигналом начала отсчета с блока 8 синхронизации и измерения времени, определяет расстояние между наблюдателем и центром притяжения аналогично прототипу.
После выполнения не менее трех наблюдений объекта вычислительный блок 10 определяет угловую скорость линии визирования объекта, например, численным дифференцированием углов ориентации линии визирования объекта и сравнивает получению скорость линии визирования с рассчитанным пороговым значением (1).
Если значение угловой скорости линии визирования меньше порогового значения, то вычислительный блок 10 выполняет определение расстояния до объекта на момент последнего наблюдения, например, численным решением по методу Ньютона уравнение
где D - расстояние до объекта наблюдения;
R1 - расстояние между наблюдателем и центром притяжения;
μ - постоянная поля притяжения;
ϕ - угол между линией визирования объекта наблюдения и направлением на центр притяжения;
где  - поток электромагнитного излучения объекта, его первая и вторая производные соответственно, которые могут быть получены в результате статистической обработки результатов измерений, например, методом наименьших квадратов.
- поток электромагнитного излучения объекта, его первая и вторая производные соответственно, которые могут быть получены в результате статистической обработки результатов измерений, например, методом наименьших квадратов.
Правомерность использования уравнения (2) для определения расстояния до объекта подтверждается следующими соображениями.
Рассмотрим движение наблюдателя и объекта в центральном поле, при этом выберем такую инерциальную систему координат, начало отсчета О которой находится в центре тяготения, ось OY параллельна линии визирования объекта, ось OZ перпендикулярна плоскости, проходящей через центр притяжения, центры масс наблюдателя (Н) и объекта наблюдения (НО), а ось ОХ дополняет систему до правой (фиг.2). В этом случае проекция Δÿ ускорения наблюдателя относительно объекта на ось OY равна
где y1, y2 - координаты наблюдателя и объекта наблюдения по оси OY соответственно;
R2 - расстояние между объектом наблюдения и центром тяготения.
Координаты y1, y2 по оси OY наблюдателя и объекта наблюдения и расстояние R2 между объектом наблюдения и центром тяготения выражаются через расстояния между наблюдателем и объектом и наблюдателем и центром тяготения следующим образом:
В результате подстановки выражений (4) в уравнение (3) и соответствующих преобразований получается следующее уравнение
Проекция Δÿ ускорения наблюдателя относительно объекта на ось OY равна второй производной  расстояния между наблюдателем и объектом по времени. Поскольку принимаемый поток электромагнитного излучения обратно пропорционален квадрату расстояния между наблюдателем и объектом, отношение второй производной
расстояния между наблюдателем и объектом по времени. Поскольку принимаемый поток электромагнитного излучения обратно пропорционален квадрату расстояния между наблюдателем и объектом, отношение второй производной  к расстоянию D запишется следующим образом
к расстоянию D запишется следующим образом
В результате подстановки выражения (6) в уравнение (5) получается уравнение (2).
Если значение угловой скорости линии визирования больше или равно пороговому значению, то по команде вычислительного блока 10 блок 4 измерения угловых координат, синхронизируемый блоком 8 синхронизации и измерения времени, дополнительно выполняет измерение угловых приборных координат объекта. Результаты измерений заносятся в блок 5 запоминания угловых координат, синхронизируемый блоком 8 синхронизации и измерения времени. Значения интервалов времени между наблюдениями из блока 8 синхронизации и измерения времени заносятся в блок 9 запоминания времени. После выполнения не менее двух дополнительных наблюдений объекта на основании полученной информации вычислительный блок 10 выполняет определение расстояния до объекта на момент последнего наблюдения, например, численным решением уравнения (2) по методу Ньютона.
При этом коэффициент ψ может быть вычислен на основании результатов угловых измерений следующим образом:
ψ = p2, p2∈P = [p1,p2,p3,p4,p5]T= M-1K, (7)
где М-1 - матрица, обратная матрице М,
К - вектор размерности [5], элементы которого вычисляются в соответствии с выражениями ki= tgγi, i=1...5, где γi - результат измерения одной из угловых координат ориентации линии визирования объекта.
Матрица М имеет блочный вид:
M=[E А В],
где E - вектор размерности [5], ei=1,
А, В - матрицы размерности [5х2], элементы которых соответственно равны
где Δ ti = ti - t1 - мерный интервал времени.
Выражение (7) может быть получено путем деления на расстояние до объекта зависимостей, получаемых в результате разложения в ряд Тейлора выражений x0 = D cos α cos β , y0 = D cos α sin β , z0 = D sin α , определяющих координаты объекта в подвижной системе координат X0Y0Z0, начало которой совпадает с центром масс наблюдателя, а оси параллельны осям инерциальной системы координат, в которых α и β - углы ориентации линии визирования объекта.
Таким образом, предлагаемый способ позволяет повысить точность определения расстояния до объекта при больших угловых скоростях линии визирования. Как показали исследования точности, предлагаемый способ позволяет производить определение расстояние до объекта на основании обработки угловых измерений с относительной среднеквадратичной погрешностью 0,2-4,0% при угловой скорости линии визирования 0,01 град/с и скорости сближения 1 км/с за время наблюдений в пределах 100-150 секунд. Определение расстояния до объекта на основании обработки результатов измерения электромагнитного потока, принимаемого от объекта, при таких же условиях взаимного движения может быть осуществлено с относительной среднеквадратичной погрешностью 3,0-10,0 %. Оценки точности получены методом статистического имитационного моделирования при относительной погрешности измерения светового потока 3%, погрешности угловых измерений 20 угловых секунд и относительной погрешности определения расстояния между наблюдателем и центром тяготения 0.001%.
ИСТОЧНИКИ ИНФОРМАЦИИ, ПРИНЯТЫЕ ВО ВНИМАНИЕ
1. Инженерный справочник по космической технике/ под ред. Солодов А.В. -М.: Воениздат, 1977, с.297-299,385-388.
2. Матвеев И.Н. и др. Лазерная локация. -М.: Машиностроение, 1984.
3. Патент США N 3798795, 1974.
4. Бегунов Б. Н. , Заказнов Н.П. Теория оптических систем.- М.: Машиностроение, 1975, с.386.
5. Авторское свидетельство СССР N 363946. Телевизионный автодальномер, 1972.
6. Hassab J.C. Passive tracking of a moving source by a single observer in shallow water.- "J. of Sound and Vibration", 1976, v44, Nl, p. 127-145.
7. Телятников В. И. Методы и устройства для определения местоположения источников звука.//Зарубежная радиоэлектроника, 1978, N 4, с.66-86.
8. Патент РФ N 2104486. Способ определения расстояния до объекта с подвижного наблюдателя, 1998 (Прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА С ПОДВИЖНОГО НАБЛЮДАТЕЛЯ | 1995 |
|
RU2104486C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ ПО РЕТРАНСЛИРОВАННОМУ СИГНАЛУ | 2000 |
|
RU2172495C1 |
| СПОСОБ УТОЧНЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕНТРА МАСС КА | 2000 |
|
RU2171969C1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2001 |
|
RU2192662C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1999 |
|
RU2173864C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЭПИЦЕНТРА ОЖИДАЕМОГО ЗЕМЛЕТРЯСЕНИЯ | 1999 |
|
RU2149427C1 |
| МАГНИТНАЯ АНТЕННА | 2000 |
|
RU2160947C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2000 |
|
RU2165628C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ БЕЗОПАСНОЙ ДИСТАНЦИИ МЕЖДУ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 1999 |
|
RU2149461C1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ЧАСОВ | 2000 |
|
RU2177167C2 |
Изобретение относится к информационно-измерительной технике и может быть использовано в системах навигации. Способ определения расстояния до объекта с подвижного наблюдателя заключается в том, что наблюдают за объектом из не менее трех точек траектории движения наблюдателя, измеряют и запоминают интервалы времени между наблюдениями, углы ориентации линии визирования объекта при каждом наблюдении, принимаемый от объекта поток электромагнитного излучения при каждом наблюдении, углы ориентации направления на центр притяжения, затем определяют угловую скорость линии визирования объекта, рассчитывают пороговое значение угловой скорости линии визирования объекта, сравнивают полученное значение с рассчитанным пороговым, если значение угловой скорости линии визирования объекта меньше порогового значения, определяют расстояние до объекта на основании результатов измерений электромагнитного потока, принимаемого от объекта, если значение угловой скорости линии визирования превышает или равно пороговому значению, дополнительно наблюдают за объектом по меньшей мере из двух точек траектории движения наблюдателя. Техническим результатом реализации данного способа является повышение точности определения расстояния до объекта при больших угловых скоростях линии визирования объекта за счет использования дополнительной информации, получаемой в результате измерения углов ориентации линии визирования объекта не менее чем в пяти точках наблюдения. 2 ил.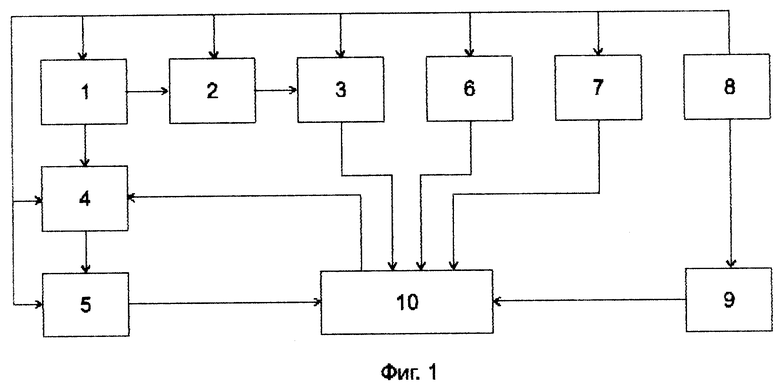
Способ определения расстояния до объекта с подвижного наблюдателя, заключающийся в том, что наблюдают за объектом из не менее трех точек траектории движения наблюдателя, измеряют и запоминают интервалы времени между наблюдениями, измеряют и запоминают принимаемый от объекта поток электромагнитного излучения при каждом наблюдении, измеряют и запоминают углы ориентации линии визирования объекта, измеряют углы ориентации направления на центр притяжения, определяют расстояние между наблюдателем и центром притяжения, отличающийся тем, что при каждом наблюдении определяют угловую скорость линии визирования объекта, рассчитывают пороговое значение для угловой скорости линии визирования объекта, сравнивают полученное значение угловой скорости линии визирования с рассчитанным пороговым значением, если значение угловой скорости линии визирования объекта меньше порогового значения, определяют расстояние до объекта на основании результатов измерений электромагнитного потока, принимаемого от объекта, если значение угловой скорости линии визирования превышает или равно пороговому значению, дополнительно наблюдают за объектом по меньшей мере из двух точек траектории движения наблюдателя, определяют расстояние до объекта на основании результатов измерений углов ориентации линии визирования объекта.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА С ПОДВИЖНОГО НАБЛЮДАТЕЛЯ | 1995 |
|
RU2104486C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ измерения дальности | 1974 |
|
SU530174A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 3610754 A, 05.10.1971 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА ГРУЗОПОДЪЕМНОГО КРАНА | 1991 |
|
RU2020300C1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ определения расстояний | 1973 |
|
SU488061A1 |
