Изобретение относится к транспортной технике, а именно к системам автоматического управления узлами и механизмами транспортного средства, в частности ДВС, гидромеханической передачей, раздаточной коробкой, блокировкой дифференциалов и др., а также их контроля и диагностики.
Известно устройство для автоматического управления узлами и механизмами транспортного средства, содержащего двигатель с элементом управления топливным насосом, кинематически связанный с бесступенчатой трансмиссией, имеющей органы управления, и исполнительные механизмы соответственно топливного насоса и трансмиссии. Пульт оператора содержит дисплей, выдающий первичную текущую информацию о состоянии объектов транспортного средства, например, показания скорости и пройденного пути. Дисплей выполнен с дополнительными символьными участками, которые высвечиваются для выдачи оператору информации о вторичных функциях объектов, в частности о включении фар дальнего и ближнего света или о включении задних противотуманных фонарей. Для оказания помощи водителю дисплей снабжен кнопкой, при нажатии на которую около подсвеченного вторичного информационного символа загорается надпись, поясняющая его значение. (EP, патент N 0122043, кл. B 60 K 37/00, 1985 г.)
Недостатками известной системы управления являются недостаточная информированность оператора о текущем состоянии объектов управления транспортного средств и отсутствие информации о критическом их состоянии, а также информации о выработке путей устранения неисправностей объектов управления. Кроме этого отсутствует информация о состоянии органов управления объектами транспортного средства.
В частности о выборе режима оптимизации работы двигателя и трансмиссии с учетом или без учета изменения внешних факторов, возникающих при движении транспортного средства. Кроме того, управление бесступенчатой трансмиссией осуществляется с недостаточной надежностью, т.к. при формировании управляющего сигнала не полностью учитываются статистические характеристики вектора скорости транспортного средства.
Известна также система управления и диагностики транспортного средства, имеющего по меньшей мере один объект управления, содержащая аналоговые датчики состояния объекта управления, локальное логическое устройство с сумматором, первый вход управляющего сигнала, которого соединен с выходом нормализующего электрического преобразователя сигналов, поступающих от оператора, а выход управляющего сигнала связан с исполнительным блоком изменения режимов работы объекта управления и центральный бортовой контроллер, выполненный в виде программируемого решающего устройства (SU, а.с. N1736771, кл. B 60 K 41/16, 1992 г).
Согласно известному техническому решению сигнал от датчика скорости, представляющий собой сумму постоянной и переменной составляющих скорости, поступает аналого-цифровой преобразователь, выходной сигнал с которого в параллельном коде поступает на порты интерфейса. Обращение к портам интерфейса происходит по сигналу с выхода микропроцессора. Обработка сигналов выполняется микропроцессором, при этом сигналы проходят от оперативно и постоянно запоминающих устройств посредством адресной шины к микропроцессору. От микропроцессора сигналы поступают к шине данных. В запоминающем устройстве записана программа вычисления коэффициента вариации скорости вращения насосного колеса гидротрансформатора гидромеханической трансмиссии. Оперативное устройство используется для записи результатов промежуточных вычислений, сравнения действительных значений коэффициента вариации скорости насосного колеса с заданными параметрами. Таймером задаются в определенное время команды управления и организуются временные задержки. При увеличении коэффициента вариации насосного колеса сверх заданного значения на выходе аналого-цифрового преобразователя возникает сигнал, под действием которого при помощи усилителя включает клапан разблокировки гидротрансформатора, который соединяет муфту с гидробаком, при этом гидротрансформатор разблокируется.
Недостатками известной системы автоматического управления и диагностики транспортного средства является относительно ограниченные технические возможности, обусловленные невозможностью обеспечения:
- температурного баланса в связи с невозможностью выбора оптимальной нагрузки на узлы и механизма транспортного средства и организации поузловой системы охлаждения энергетической установки за счет перераспределения нагрузки;
- экономии топлива в связи с невозможностью выбора оптимального режима эксплуатации узлов и механизмов транспортного средства, в частности ДВС, гидромеханической трансмиссии, раздаточной коробки, блокировки дифференциалов и др.;
- увеличения динамической характеристики ввиду отсутствия оперативного реагирования на изменение внешних факторов, например изменение профиля дороги, структуры дорожного покрытия и т.п.
- экстренного обнаружения и локализации неисправностей и исключения неисправного блока системы из процесса управления.
Задачей, на решение которой направлено настоящее изобретение, заключается в расширении технических возможностей системы управления за счет обеспечения на базе контрольно-диагностической системы построения комплексной системы управления объектами, узлами и механизмами для организации самообучающихся и роботизированных (адаптивных) систем управления транспортным средством, позволяющих получить следующие преимущества:
- обеспечение температурного баланса за счет выбора оптимальной нагрузки и организации системы охлаждения энергетической установки;
- экономия топлива за счет выбора оптимального режима эксплуатации;
- увеличение динамической характеристики за счет оперативного реагирования на изменение внешних факторов, например изменение профиля дороги, структуры дорожного покрытия и т.п.;
- экстренное обнаружение и локализации неисправностей и исключение неисправного блока системы из процесса управления.
Для достижения указанного выше технического результата известная система управления и диагностики транспортного средства, имеющего по меньшей мере один объект управления, содержащая аналоговые датчики состояния объекта управления, локальное логическое устройство с сумматором, первый вход управляющего преобразователя сигналов, поступающих от оператора, а выход управляющего сигнала связан с исполнительным блоком изменения режимов работы объекта управления и центральный бортовой контроллер, выполненный в виде программируемого решающего устройства, она снабжена дискретными датчиками для формирования сигналов соответственно критического и текущего состояния объекта управления, локальное логическое устройство снабжено мультиплексорным блоком диагностических данных для контролирования и диагностики функционирования данного объекта управления, первый вход управляющего сигнала которого соединен с выходом управляющего сигнала центрального бортового контроллера, соединенного через блок памяти данных, выполненный с возможностью изменения состояния по адресу и такту, со вторым входом управляющего сигнала сумматора, второй информационного сигнала мультиплексорного блока диагностических данных соединен с выходом информационного сигнала сумматора, а его выход - с одним входом центрального бортового контроллера, при этом аналоговые датчики и дискретные датчики для формирования сигналов критического состояния соединены соответственно с двумя другими входами центрального бортового контроллера, а дискретные датчики для формирования сигналов текущего состояния и дискретные датчики для формирования сигналов критического состояния соединены с третьим входом информационного сигнала сумматора локального логического устройства, при этом центральный бортовой контроллер состоит, блока обработки и приема информации и пульта оператора, на котором размещены информационное поле, включающее две части - приемную с обобщенной текущей информацией и приемно-передающую с критической и предельной информацией, сенсорное поле с индикаторами, шкальный индикатор, цифровой индикатор, дисплей, аварийные сигнализаторы, указатель готовности и сенсоры ввода и поиска информации, вход центрального бортового контроллера, соединенный с выходом мультиплексорного блока, соединен с приемно-передающей частью информационного поля, входы центрального бортового контроллера, соединенные с выходом аналоговых датчиков и выходом дискретных датчиков для формирования сигналов критического состояния, соединены с первым и вторым входами блока обработки и приема информации, выход центрального бортового контроллера соединен с выходом блока обработки приема информации, выходы приемно-передающей части информационного поля пульта оператора, сенсорного поля и сенсоров ввода и поиска соединены с входами логического решающего устройства, а входы индикаторов сенсорного поля, приемной части информационного поля, шкального индикатора, цифрового индикатора, дисплея, аварийных сигнализаторов и указателей готовности системы к работе соединены с выходами логического решающего устройства, которое через двунаправленную мультиплексорную связь соединено с блоком обработки и приема информации.
Кроме этого, пульт оператора выполнен с аналоговым показывающим прибором, например спидометром, связанным с датчиком оборотов выходного вала трансмиссии.
Кроме этого, она снабжена дополнительными дискретными датчиками для формирования сигналов текущего состояния локального логического устройства управления, выходы которых соединены с третьим входом информационного сигнала мультиплексорного блока диагностических данных.
Кроме этого, она снабжена дополнительными аналоговыми и дискретными, датчиками для формирования сигналов соответственно критического и текущего состояния по меньшей мере еще одного объекта управления, и по меньшей мере одним дополнительным локальным логическим устройством, количество которых равно количеству объектов управления, при этом первый вход управляющего соединений с нормализующим электрическим преобразователем сигналов, поступающих от оператора, второй вход управляющего сигнала сумматора соединен через блок памяти с выходом центрального бортового контроллера, который связан с первым входом управляющего сигнала мультиплексорного блока дополнительного локального логического устройства, выход информационного сигнала сумматора соединен со вторым входом информационного сигнала мультиплексорного блока диагностических данных дополнительного локального логического устройства, выход которого соединен с одним входом центрального бортового контроллера, выход управляющего сигнала сумматора дополнительного локального логического устройства соединен с исполнительным блоком изменения режимов работы данного объекта управления, при этом аналоговые датчики и дискретные датчики для формирования сигналов критического состояния соединены соответственно с двумя другими входами центрального бортового контроллера, а дискретные датчики для формирования сигналов текущего состояния и дискретные датчики для формирования сигналов критического состояния соединены с третьим входом информационного сигнала сумматора дополнительного локального логического устройства.
Кроме этого, она снабжена дополнительными дискретными датчиками для формирования сигналов текущего состояния дополнительного локального логического устройства управления, выходы которых соединены с третьим входом информационного сигнала мультиплексорного блока диагностических данных.
Кроме этого, она снабжена дополнительными аналоговыми датчики и дискретными для формирования сигналов соответственно критического и текущего состояния по меньшей мере еще одного объекта управления, при этом аналоговые датчики и дискретные датчики для формирования сигналов критического состояния соединены соответственно с двумя другими входами центрального бортового контроллера, а дискретные датчики для формирования сигналов текущего состояния и дискретные датчики для формирования сигналов критического состояния соединены с третьим входом информационного сигнала сумматора локального логического устройства.
Кроме этого, приемно-передающая часть информационного поля представляет собой индикаторы цветной символьной информации от датчиков предельных состояний по меньшей мере одного объекта управления транспортного средства.
Кроме этого, приемная часть информационного поля представляет собой два участка, первый из которых выполнен в виде индикаторов цветной символьной информации для рекомендации действий оператора в системе управления, а второй участок - индикаторов цветной символьной информации объединенных функций системы контроля.
Кроме этого, сенсорное поле представляют собой информационное поле двойного назначения для по агрегатного разделения информации и при совместном использовании с сенсорами ввода и поиска для количественного задатчика физической величины объекта управления транспортного средства соответственно.
Кроме этого, она снабжена переключателем режима работы по готовности блока обработки и приема информации и пульта оператора, установленным на выходе управления центрального бортового контроллера, второй вход которого связан с выходом логического решающего устройства пульта оператора.
Указанные признаки являются существенными и взаимосвязанными между собой причинно-следственной связью с образованием совокупности существенных признаков, необходимых и достаточных для достижения указанного технического результата.
На фиг. 1 изображена блок-схема системы управления и диагностики транспортного средства; на фиг.2 - вариант выполнения блок-схемы управления и диагностики транспортного средства; на фиг.3 - система управления и диагностики гидромеханической коробкой передач транспортного средства; на фиг. 4 - конструктивное выполнение локального логического устройства управления и его связей с другими элементами системы управления и диагностики транспортного средства; на фиг.5 - вариант выполнения пульта управления оператора.
Изобретение поясняется конкретным примером выполнения, который однако не является единственно возможным, но наглядно демонстрирует возможность достижения данной совокупностью признаков технического результата.
Транспортное средство содержит энергетическую установку, кинематически связанную с гидромеханической коробкой передач (ГМП), имеющей блокируемый гидротрансформатор. Трансмиссия кинематически связана с движителем. Система автоматического управления и диагностики указанными выше объектами управления транспортного средства состоит из нормализованного электрического преобразователя 1 сигналов (фиг.1), поступающих от оператора 2, выход преобразователя 1 соединен с первый входом управляющего сигнала сумматора 3 локального логического устройства (ЛЛУ)4. Выход управляющего сигнала сумматора 3 связан с исполнительным блоком 5 изменения режимов работы первого объекта управления 6 транспортного средства.
Центральный бортовой контроллер (ЦБК) 7 выполнен в виде программируемого решающего устройства для формирования управляющего сигнала по совокупности аналоговой и дискретной информации. ЛЛУ 4 снабжено мультиплексорным блоком 8 диагностических данных для контролирования и диагностики функционирования данного объекта управления, первый вход управляющего сигнала которого соединен с выходом ЦБК 7, соединенного через блок 9 памяти данных, который выполнен с возможностью изменения состояния по адресу и такту, со вторым входом управляющего сигнала сумматора 3. Второй вход информационного сигнала мультиплексорного блока 8 диагностических данных соединен с выходом информационного сигнала сумматора 3, а его выход - с одним входом ЦБК 7. Датчики состояния каждого объекта управления выполнены аналоговыми 10 для формирования сигналов состояния соответствующего объекта управления транспортного средства и дискретными 11, 12 для формирования сигналов соответственно критического и текущего его состояния. Аналоговые датчики 10 и дискретные датчики 11 для формирования сигналов критического состояния соединены соответственно с двумя другими входами ЦБК 7, а дискретные датчики 12 для формирования сигнала текущего состояния и дискретные датчики 11 для формирования сигналов критического состояния соединены с входом информационного сигнала сумматора 3 ЛЛУ 4.
С целью расширения функциональных возможностей системы управления, касающихся обеспечения осуществления диагностирования, а также использования информации о состоянии локального логического устройства (ЛЛУ) 4 в процессе выработки управляющего воздействия система управления и диагностики объекта управления выполнена с дополнительными дискретными датчиками 13 для формирования сигналов текущего состояния ЛЛУ 4, которые своими выходами соединены с третьим входом информационного сигнала мультиплексорного блока 8 диагностических данных.
В случае выполнения системы управления и диагностики применительно к двум объектам управления аналоговые 14 и дискретные 15, 16 датчики должны быть также установлены на втором объекте управления 17 для формирования сигналов соответственно критического и текущего его состояния. При этом система управления снабжена дополнительным ЛЛУ 18, причем количество их равно количеству других объектов управления кроме первого. Первый вход управляющего сигнала сумматора 19 дополнительного ЛЛУ 18 соединен с нормализующим электрическим преобразователем 1 сигналов, поступающих от оператора 2, второй вход управляющего сигнала сумматора 19 соединен через блок памяти 20 с выходом ЦБК 7, который связан с первым входом управляющего сигнала мультиплексорного блока 21 дополнительного ЛЛУ 18. Выход информационного сигнала сумматора 19 соединен со вторым входом информационного сигнала мультиплексорного блока 21, выход которого соединен с одним входом ЦБК 7. Выход управляющего сигнала сумматора 19 дополнительного ЛЛУ 18 соединен с исполнительным блоком 22 изменения режимов работы второго объекта управления 17. Аналоговые датчики 14 и дискретные датчики 15 для формирования сигналов критического состояния соединены соответственно со вторым и третьим входами ЦБК 7, а дискретные датчики 16 для формирования сигналов текущего состояния и дискретные датчики 15 для формирования сигналов критического состояния соединены с третьим входом информационного сигнала сумматора 19 дополнительного ЛЛУ 18.
В этом случае для расширения функциональных возможностей системы управления, наделяя ее возможностью осуществления не только диагностирования, а также использования информации о состоянии данного локального логического устройства (ЛЛУ) 18 в процессе выработки управляющего воздействия в системе управления и диагностики этого объекта управления дополнительное ЛЛУ 18 выполнено с дополнительными дискретными датчиками 23 для формирования сигналов текущего состояния ЛЛУ 18, выходы которых соединены с третьим входом информационного сигнала мультиплексорного блока 21 диагностических данных.
Для варианта выполнения системы управления и диагностики более двух объектов управления транспортного средства аналоговые 14 и дискретные 25, 26 датчики установлены на третьем объекте управления 27 (фиг.1) для формирования сигналов соответственно критического и текущего его состояния. В этом случае система управления снабжена дополнительным ЛЛУ 28. Первый вход управляющего сигнала сумматора 29 дополнительного ЛЛУ 28 соединен с нормализуемым электрическим преобразователем 1 сигналов, поступающих от оператора 2, второй вход управляющего сигнала сумматора 29 соединен через блок памяти 30 с выходом ЦБК 7, который связан с первым входом управляющего сигнала мультиплексорного блока 31 дополнительного ЛЛУ 28. Информационный выход сумматора 29 соединен со вторым входом информационного сигнала мультиплексорного блока 31, выход которого соединен с одним входом ЦБК 7. Выход управляющего сигнала сумматора 29 дополнительного ЛЛУ 28 соединен с исполнительным блоком 32 изменения режимов работы третьего объекта управления 27. Аналоговые датчики 24 и дискретные датчики 25 для формирования сигналов критического состояния соединены соответственно с двумя другими входами ЦБК 7, а дискретные датчики 26 для формирования сигналов текущего состояния и дискретные датчики 25 для формирования сигналов критического состояния соединены с третьим входом информационного сигнала сумматора 29 дополнительного ЛЛУ 28.
Дополнительное ЛЛУ 28 выполнено с дополнительными дискретными датчиками 33 для формирования сигналов текущего состояния ЛЛУ 28, выходы которых соединены с третьим входом мультиплексорного блока 31 диагностических данных.
Аналогичным образом соединяются другие аналоговые и дискретные датчики текущего и критического состояния объектов управления транспортного средства, количество которых может быть n, при этом для n объектов управления система управления и диагностики выполняется с n количеством ЛЛУ.
В одном из вариантов выполнения система управления и диагностики для "n" объектов управления может быть выполнена с одним локальным логическим устройством. Такой вариант представлен на фиг.2.
Согласно этому варианту выполнения аналоговые датчики 10 первого объекта управления 6, аналоговые датчики 14 второго объекта управления 17 и аналоговые датчики 24 третьего объекта управления соединены с одним входом ЦБК 7. Дискретные датчики 11, 15 и 25 соответственно первого 6, второго 17 и третьего 27 объектов управления для формирования сигналов критического состояния этих объектов управления соединены с другим входом ЦБК 7 и совместно с дискретными датчиками 12, 16 и 26 соответственно первого 6, второго 17 и третьего 27 объектов управления для формирования сигналов текущего состояния этих объектов управления соединены с третьим входом информационного сигнала сумматора 3 ЛЛУ 4.
В качестве объектов управления могут быть гидромеханическая передача с блокируемым гидротрансформатором (ГМП), энергетическая установка в виде двигателя внутреннего сгорания (ДВС), трансмиссия, имеющая раздаточную коробку, колесные редукторы и т.п., тормозная система управления, система рулевого управления, система обеспечения климатических условий в салоне транспортного средства и др. узлы и механизмы транспортного средства.
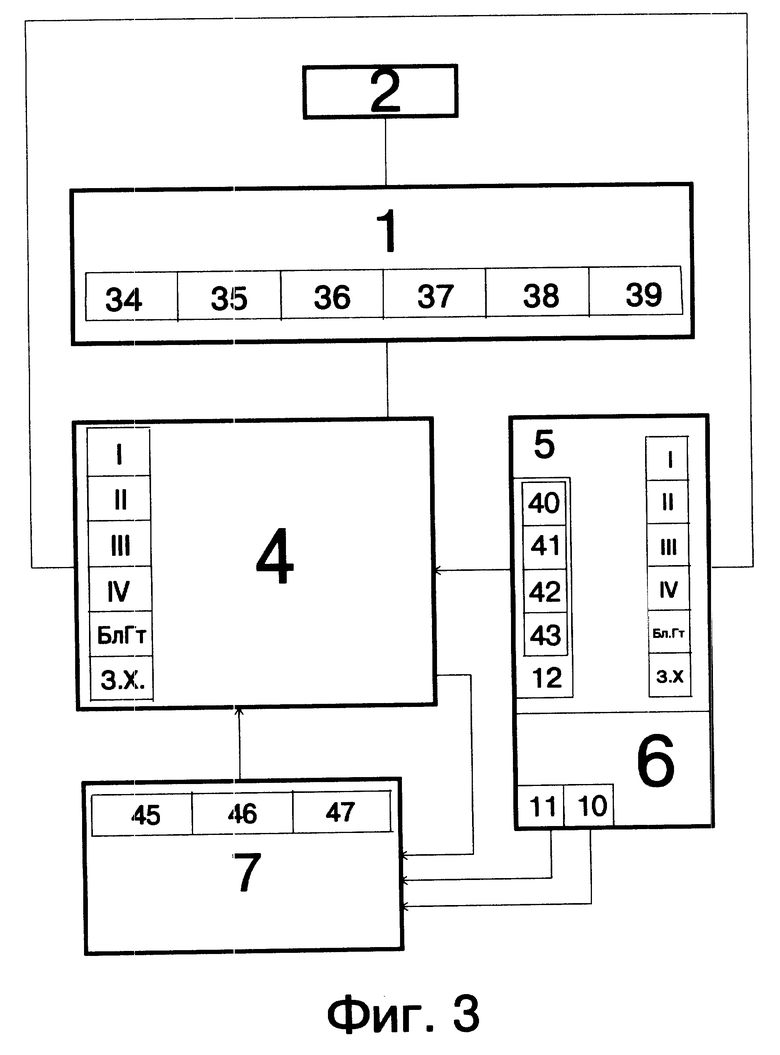
На фиг.3 изображена блок-схема системы управления и диагностики гидромеханической передачи (ГМП) 6 транспортного средства.
Система автоматического управления и диагностики ГМП 6 состоит из преобразователя 1 сигналов (фиг. 3), поступающих от оператора 2 на первый вход управляющего сигнала ЛЛУ 4 с выходом 34, 35, 36, 37, 38, 39, соответствующих сигналам положения рычага переключения передач в режимах "передача I", "передача II", "передача III", "задний ход (з.х.)", "блокировка гидротрансформатора (ГТ)" и " ручное" или "автоматическое управление" ГМП 6.
Аналоговые датчики 10 ГМП 6 представляют собой датчики, например, температуры масла, давления смазки скорости транспортного средства и др., соединенные с одним их входов ЦБК 7. Дискретные датчики 11 критического состояния ГМП 6, например датчики, показывающие отсутствие давления в системе управления ГМП 6, соединены с другим входом ЦБК 7. Дискретные датчики 12 текущего состояния ГМП 6, например датчики 40, 41, 42, 43 состояния электромагнитов исполнительного блока 5 включения режимов соответственно: "передача II", "передача III", "передача IV", соединены с входом информационного сигнала ЛЛУ 4, выход информационного сигнала которого соединен с еще одним входом ЦБК 7, соответствующего данным о состоянии ЛЛУ 4, ГМП 6 и рычага переключения передач преобразователя 1. Выход ЦБК 7, представляющего собой выходы 45, 46, 47 сигналов, соответствующих данным управления по адрес и такту, соединен со вторым входом управляющего сигнала ЛЛУ 4, а его выход управляющего сигнала, соответствующего режимам включения ГПМ 6, а именно: "передача I", "передача II", "передача III", "передача IV", "блокировка гидротрансформатора (ГТ)", "задний ход з.х.", соединен со входом исполнительного блока 5 ГМП 6 для изменения режимов его работы, а именно с электромагнитов соответственно: 81, 82, 82*, 83, 83*, 84.
Пример конкретной реализации системы управления ГМП транспортного средства представлен на фиг.4.
Преобразователь 1 сигналов, представляющий собой группу переключателей, преобразующих механические сигналы, поступающие от оператора 2, в электрические нормализованные сигналы соответствующие режимам работы ГМП 6, которые поступают на входы: 48, соответствующий режиму "блокировка трансформатора (БЛГТ)", 49, соответствующий режиму "нейтраль", 50, соответствующий режиму "передача I", 51, соответствующий режиму "передача II", 52, соответствующий режиму "передача III", 53, соответствующий режиму "заднего хода (з.х.)", 54, соответствующий режиму "ручное" или "автоматическое управление" порта 55 ЛЛУ 4.
ЛЛУ 4 через порт 56 и системную шину 57 данных, адреса и такта связан с ЦБК 7.
Порт 56 имеет входы: 58 - "адреса", 59 - "такта" и дискретных сигналов текущего состояния ГМП 6, а именно: вход 60 - соответствует режиму - "передача I", вход 61 соответствует режиму - "передача II", вход 62 - соответствует режиму - "передача III", вход 63 соответствует режиму - "блокировка трансформатора", вход 64 соответствует режиму - "заднего хода", вход 65 - соответствует режиму "ограничение скорости на первой передаче", вход 66 - соответствует режиму "ограничение скорости на второй передаче", вход 67 - соответствует режиму "ограничение скорости на третьей передаче". Входы 58-67, а также вход 54 подключены к соответствующим входам блока 9 памяти данных, выполненного в виде регистра управления, состояние которого изменяется по сигналу "такта".
Упомянутый регистр данных системы управления принимает информацию по шине данных при включении сигнала 54, соответствующего режиму "автоматического управления", когда происходит обращение к памяти по адресу при соответствующем сигнале. На входе регистра выставляется информация по совокупному анализу состояния всех объектов управления транспортного средства. Блок 9 памяти данных имеет следующие выходы: 68, соответствующий команде "включение первой передаче", 69 - команде "включение второй передачи", 70 - "третьей передачи", 70* - "четвертой передаче", 71 - команде "заблокировать гидротрансформатор", 72 - команде "ограничить по скорости 1", 73 - команде "ограничить по скорости 2", 74 - команде " ограничить по скорости 3". Эти сигналы поступают на сумматор, который может быть выполнен как на логических элементах, в том числе и на релейных, так и с помощью программного логического устройства, или же при помощи микропроцессора.
Обратная связь о включении передач осуществляется через порт 75 посредством входов 76, 77, 78, 79, 80, на которые приходят сигналы о состоянии давления входов 76, 77, 78, 79, 80, на которые приходят сигналы о состоянии давления в исполнительном блоке соответственно первой передачи, второй передачи, третьей передачи, четвертой передаче, блокировки гидротрансформатора.
Исполнительный блок 5 ГМП 6 выполнен в виде электромагнитов 81, 82, 82*, 83, 83*, 84 управления гидравлической системы включения соответственно режимов: "передача I", "передача II", "передача III", "блокировка гидротрансформатора" и "задний ход", которые также через порт 85 подключены к ЛЛУ 4.
Мультиплексорный блок 86 диагностических данных выполнен восьмиразрядным и подключен через порт 87 к системной шине 87* дискретных данных ЦБК 7.
ЛЛУ 4 своими выходами 88, 89, 90, 91, 92 и 93, выполненными в виде контактов электромагнитов 81, 82, 82*, 83, 83* и 84 гидравлической системы включения режимов ГМП 6: "передача I", "передача II", "передача III", "передача IV", "блокировка гидротрансформатора" и "задней ход (з.х.)" исполнительного блока 5 изменения режимов ГМП6.
Входы 58, 59, 60, 61, 62, 63, 64, 65, 66, 67 и 54 ЛЛУ 4 соединены с соответствующими входами блока 9 памяти данных, который имеет выходы 68, 69, 70, 70*, 71, 72, 73, и 74.
Суммирующий модуль формирования управляющего сигнала включения первой передачи представляет собой логический элемент "И" 94 к инверсным входам которого подключены входы 77, 78, 79, 73 и 74 ЛЛУ 4, а вход 52 соединен со входом логического элемента "И/НЕ" 95, с инверсным входом которого соединен вход 54, а его выход соединен с двумя логическими элементами "И" 96, 97, с другими входами которых соединены входы 68 и 50 для обеспечения связи по элементу "ИЛИ" 98. Выход логического элемента "ИЛИ" 98 соединен со входом элемента "ИЛИ" 99, на второй вход которого подключен вхож 93*, а его выход соединен с входом логического элемента "И" 94, выход которого соединен с первым входом логического логический элемента "И" 100, на второй вход которого подключен вход 49, и который обеспечивает сложение сигналов для формирования первой передачи. Выход логического элемента "И" 100 через усилитель 101 соединен с катушкой 102 реле, контакты 88 которого подключены к электромагниту 81 включения посредством гидравлической системы режима "передача I" ГМП 6.
Суммирующий модуль формирования управляющего сигнала включения второй передачи ГМП представляет собой логический элемент "И" 103, к инверсным входам которого подключены входы 76, 78, 79, 74 ЛЛУ 4, в вход 52 соединен со входом логического элемента "И/НЕ" 104, с инверсным входом которого соединен вход 54, а его выход соединен с двумя логическими элементами "И" 105, 106, с другими входами которых соединены входы 69 и 51 для обеспечения связи по элементу "ИЛИ" 107. Выход элемента "ИЛИ" 107 соединен со входом элемента "И" 103, выход которого соединен с первым входом логического элемента "И" 108, на второй вход которого подключен вход 49, и который обеспечивает сложение сигналов для формирования второй передачи. Выход элемента "И" 108 через усилитель 109 соединен с катушкой 110 реле, контакты 89 которого подключены к электромагниту 82 включения посредством гидравлической системы режима "передача II" ГМП 6.
Суммирующий модуль формирования управляющего сигнала включения третьей передачи ГМП 6 представляет собой логический элемент "И" 111, к инверсным входам которого подключены входы 76, 77, 79 ЛЛУ 4, а вход 52 соединен со входом логического элемента "И/НЕ" 112, с инверсным входом которого соединен вход 54, а его выход соединен с двумя логическими элементами "И" 113, 114, с другими входами которых соединены входы 70 и 52 для обеспечения связи по элементу "ИЛИ" 115. Выход элемента "ИЛИ" 115 соединен со входом элемента "И" 111, выход которого соединен с первым входом логического элемента "И" 116, на второй вход которого подключен вход 49, и который обеспечивает сложение сигналов для формирования третьей передачи. Выход элемента "И" 116 через усилитель 117 соединен с катушкой 118 реле, контакты 90 которого подключены к электромагниту 82* включения посредством гидравлической системой режима "передача III" ГМП 6.
Для формирования управляющего сигнала включения четвертой передачи ГМП 6, включаемой только в автоматическом режиме управления транспортным средством, суммирующий модуль формирования этого сигнала представляет собой логический элемент "И" 119, к инверсным входам которого подключены входы 76, 77, 78 ЛЛУ 4, а вход 52 соединен с входом логического элемента И/НЕ 120, с инверсным входом которого соединен вход 54, а его выход соединен с двумя логическими элементами И 121, 122, с другими входами которых соединен вход 70* для обеспечения связи по элементу ИЛИ 123. Выход логического элемента ИЛИ 123 соединен с входом элемента И 119, выход которого соединен с первым входом логического элемента И 124, на второй инверсный вход которого подключен вход 49, и который обеспечивает сложение сигналов для формирования сигнала включения четвертой передачи. Выход элемента И 124 через усилитель 125 соединен с катушкой 126 реле, контакты 91 которого подключены к электромагниту 83 включения режима "Передача IV" ГМП 6 посредством гидравлической системы.
Режим "блокировка гидротрансформатора" ГМП 6 осуществляется суммирующим модулем, представляющим собой логический элемент И 127, к которому подключены входы 50, 51, 52, 68, 69, 70, 70* и 53 ЛЛУ 4, а выход соединен со входом "сброса" триггера 128. Входы 48 и 71 через логический элемент ИЛИ 129 соединен со "счетным" входом триггера 128, выход которого и вход 49 соединены со входами элемента И 130, выход которого соединен через усилитель 131 с катушкой 132 реле контакта 92 электромагнита 83* включения режима "блокировка гидротрансформатора" при помощи гидравлической системы.
Для осуществления режима ГМП 6 "задний ход" суммирующий модуль выполнен в виде логического элемента И 133, к входу которого подключен вход 53, а к инверсным его входам - входы 72, 73, 74, 77, 78 и 79 ЛЛУ 4, а выход элемента И 133 соединен со входом элемента И 134, инверсный вход которого соединен со входом 49 ЛЛУ 4. Выход элемента И 134 соединен со входом "сброса" триггера 135, "счетный" вход которого соединен со входом 53 ЛЛУ 4.
Выход триггера 135 через усилитель 136 связан с катушкой 137 реле, контакты 93 которого подключены к электромагниту 84 включения режима ГМП 6 "задний ход" при помощи гидравлической системы.
Мультиплексорный блок 86 согласно примеру выполнения (фиг.4) состоит из мультиплексорных модулей, в первый 138 из которых поступают данные аналоговых и дискретных датчиков текущего и критического состояния ГМП 6 со входов 60, 49, 50, 51, 52, 53, 61, 62, 63 ЛЛУ 4. На второй мультиплексорный модуль 139 поступают данные дискретных датчиков текущего состояния ГМП 6 со входом 61, 76, 77, 78, 79, 72, 73, 74, 60, 62, 63, 65, 66 и 67 ЛЛУ 4. На мультиплексорный модуль 140 поступают данные о текущем состоянии локального логического устройства управления со входа 62 и контактов 88, 89, 90, 91, 92 и 93. При этом выходы каждого мультиплексорного модуля соединены с соответствующим входом порта 87 мультиплексорного блока 86.
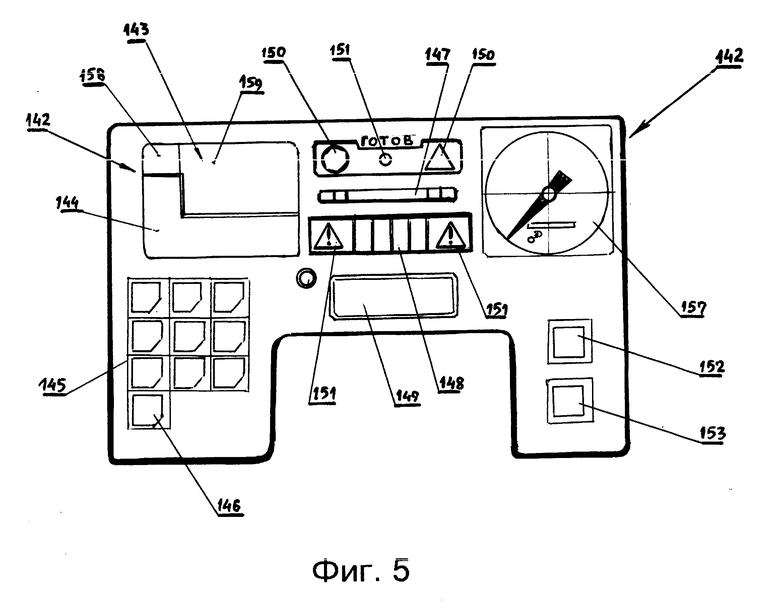
Центральный бортовой контроллер 7 (фиг.1 и 2) состоит из блока 141 обработки и приема информации и пульта 142 оператора, на котором размещены информационное поле, включающее две части - приемную 143 с обобщенной текущей информацией и приемно-передающую 144 в критической и предельной информацией, сенсорное поле 145 с индикаторными 146, шкальный индикатор 147, цифровой индикатор 148, дисплей 149, аварийные сигнализаторы 150, указатель готовности 151 и сенсоры 152 ввода и 153 поиска информации. Вход центрального бортового контроллера 7, соединенный с выходом мультиплексорного блока 8, соединен с приемно-передающей частью 144 информационного поля, входы центрального бортового контроллера 7, соединенные выходом аналоговых датчиков 10 и выходом дискретных датчиков 11 для формирования сигналов критического состояния, соединены с первым и вторым входом блока 141 обработки и приема информации. Выход центрального бортового контроллера 7 соединен с выходом блока обработки и приема информации 141, выходы приемно-передающей части 144 информационного поля пульта 142 оператора, сенсорного поля 145 и сенсоров 152 ввода и 153 поиска соединены со входами логического решающего устройства 154, а входы индикаторов 146 сенсорного поля 145, приемной части 143 информационного поля, шкального индикатора 147, цифрового индикатора 148, дисплея 149, аварийных сигнализаторов 150 и указателей готовности 151 системы к работе соединены с выходами логического решающего устройства 154, которое через двунаправленную мультиплексорную связь 155 соединено с блоком 141 обработки и приема информации.
Пульт оператора 142 выполнен с аналоговым показывающим прибором 156, например спидометром, связанным с датчиком 157 оборотов выходного вала трансмиссии.
Приемно-передающая часть 144 информационного поля представляет собой индикаторы цветной символьной информации от датчиков предельных состояний по меньшей мере одного объекта транспортного средства.
Приемная часть 143 (фиг.5) информационного поля представляет собой два участка 158 и 159, первый из которых выполнен в виде индикаторов цветной символьной информации для рекомендации действий оператора в системе управления, а второй участок - индикаторов цветной символьной информации объединенных функций системы контроля.
Сенсорное поле 145 представляют собой информационное поле двойного назначения для по агрегатного разделения информации и при совместном использовании с сенсорами ввода 152 и поиска 153 для количественного задатчика физической величины объекта транспортного средства соответственно.
Система снабжена переключателем 160 режима работы по готовности блока 141 обработки и приема информации и пульта 142 оператора, установленным на выходе ЦБК 7, второй вход которого связан с выходом логического решающего устройства 154 пульта 142 оператора.
Система управления и диагностики транспортного средства работает следующим образом.
Система согласно изобретению предназначена для организации адаптивных систем управления в многоуровневом иерархическом управляющем комплексе разно функциональных объектов управления.
Система построена по принципу подчинения высшему звену управления на базе диагностических данных о состоянии объектов управления и всех узлов и механизмов транспортного средства в целом. Направление управляющего воздействия формируется в зависимости от совокупной информации по всему объекту через контрольные точки замеров аналогового дискретного (порогового) состояния объектов управления транспортного средства.
Информация, поступающая в ЦБК 7 и ЛЛУ 4, разделена на два вида: аналоговая и дискретная.
Аналоговая информация обеспечивает ЦБК 7 необходимой информацией для выработки управляющего воздействия. По ней определяют выход объектов управления за рамки диагностических параметров, текущее состояние объекта вплоть до критического его состояния, скорость нарастания аналоговых сигналов, положительное или отрицательное состояние скорости нарастания аналоговых сигналов, направление выхода за границы диапазона устойчивой работы системы управления и диагностики.
Дискретная информация представляет собой преобразование физического состояния объектов управления в пороговые сигналы и подразделяется на три вида:
- информация физических величин критических состояний;
- информация о состоянии объекта управления;
- диагностическая информация электрических цепей.
Подобное разбиение позволяет распределить задачу обработки сигналов на три временных функции и совмещать пороговую и аналоговую информацию.
Управляющее воздействие формируется в двух направлениях:
- ручное управление по командам оператора;
- автоматические управление в режиме полного управления или корректора ручного управления.
Автоматическое управление построено по принципу "грубо" и "точно". Выбор направления управляющего воздействия формируется последовательно за определенный период времени и корректируется по входящим параметрам после подачи команды управления. Приоритет управляющего воздействия определяется по наиболее значимому параметру, при этом управляющее воздействие преследует одну цель - сохранение работоспособности транспортного средства. Немаловажную роль в формировании управляющего воздействия играет локальное логическое устройство управления 4, которое обеспечивает согласование информационных сигналов управления в силовые сигналы электрических исполнительных механизмов; решение логических задач различных уровней, включая микропроцессорный, для организации ручного управления данным объектом управления; мультиплексирование (кодирование) для формирования единой информационной шины данных дискретной информации. ЛЛУ 4 является автономным с независимой системой формирования внешнего управляющего воздействия, при этом они обеспечивают подключение/отключение системы управления высшего уровня ЦБК 7.
Организация ЛЛУ 4 ГМП 6 как элемента дискретного управления. Оператор предварительно производит выбор вида управления: автоматическое или ручное. Для включения автоматического режима управления устанавливают рычаг переключения передач в положение "АВТ", после чего центральным бортовым контроллером 7, соединенным с аналоговыми 10 и дискретными 11, 12 датчиками состояния соответствующих объектов управления транспортного средства, осуществляется контроль за их состоянием перед началом движения, в частности проверяется состояние тормозной системы, рулевого управления, положения команд управления начала движения и др.
В качестве примера рассмотрим процесс выбора и включения соответствующих режимов в гидромеханической передаче транспортного средства в автоматическом режиме.
Управление ГМП 6 в автоматическом режиме осуществляется по обобщенному анализу состояний ГМП 6, ЛЛУ 4, ДВС 17 и т.д.
Сигналы от оператора 2 посредством преобразователя 1 нормализуются в электрические сигналы 48, 49, 50, 51, 52, 53, 54, соответствующие режимам ГМП 6 "блокировка гидротрансформатора (ГТ)", "нейтраль", "передача I", "передача II", "передача III", "задний ход (з.х.)", "ручное" или "автоматическое управление", которые выполняют условия ручного управления состоянием объектов управления транспортного средства, а также обеспечивают задание автоматического режима управления этим объектом.
ЦБК 7 через порт 56 данных, адреса и такта подключен ЛЛУ 4 ГПМ 6 своею шиной 57. Обратная связь о включении соответствующей передачи осуществляется через контакты 76, 77, 78, 79 и 80.
Блок памяти 9, выполненный в виде регистра, принимает информацию от шины 57 данных при включенном режиме "автоматическое управление" в виде сигнала 54, когда происходит обращение к блоку памяти по адресу ЛЛУ 4. На выходе блока памяти 9 по совокупному анализу состояния всей шины формируются с ее выходом 68, 69, 70, 70*, 71, 72, 73 и 74, сигналы управления. Эти сигналы поступают в сумматор, выполненный в виде логического решающего устройства, которое может быть выполнено на основе логических элементов, в том числе и на релейных, так и с помощью программного логического устройства или микропроцессора, в случае решения сложных задач по комплексному управлению транспортным средством.
На фиг. 4 представлен вариант системы, выполненной на основе логических элементах. Основной принцип работы системы управления и диагностики заключается в том, что при совпадении сигналов ручного и автоматического режимов управления сигналы подтверждаются, если нет при этом ограничений. Если сигналы не совпадают, то приоритет отдается ручному режиму управления. Если установлен автоматический режим управления, то всем управляет ЦБК 7, если нет ограничений. В частности, к таким ограничениям могут быть отнесены:
- несогласование сигналов по скорости, поступающих с выходов 72, 73, 74;
- несогласование сигналов, характеризующих включение соответствующих режимов ГМП 6 (с целью недопущения двойного включения), поступающих с выходом 76, 77, 78, 79.
В данном случае выбранный сигнал из сумматора поступает в ЛЛУ 4 и сравнивается с поступающим от преобразователя 1 сигналом, характеризующим положение рычага переключения передач, выбираемое оператором 2, и с сигналом, характеризующим состояние исполнительного блока 5.
При совпадении сигналов управляющий сигнал, поступающий от ЦБК 7, через сумматор 3, поступает на усилитель соответствующего режима ГМП 6, далее на электромагнит исполнительного блока 5 гидравлической системы включения этого режима.
В случае перевода рычага переключения передач в любое другое положение посредством преобразователя 1 вырабатывается сигнал, блокирующий управляющий сигнал, вырабатываемый через блок памяти 9 данных, и формируется сигнал о режиме ГМП 6 по состоянию рычага переключения передач в преобразователе 1. Этот сигнал через сумматор 3 и соответствующий усилитель передается на электромагнит исполнительного блока 5 гидравлической системы включения режима, заданного оператором.
Если включен режим "автоматическое управление" или же рычаг переключения передач преобразователя не установлен в положении режима "передача III", то включается тот режим, на который установлен рычаг переключения передач.
Подробнее рассмотрены основные режимы работы пульта 142 оператора в сочетании другими блоками системы управления и диагностики транспортного средства, а именно: аварийный режим, текущей информации без участия БОПИ 141, режим работы с БОПИ 141, режим поиска неисправностей, режим ввода информации и режим готовности объектов транспортного средства к работе.
Работа системы управления и диагностики в аварийном режиме объектов транспортного средства.
Информация поступает непосредственно от датчиков 11, 15 и 25 критического состояния объектов транспортного средства и через мультиплексорные блоки 8, 21, 31 диагностических данных на символьное поле 144 и на резервный аналоговый прибор 156, обеспечивая тем самым минимальный объем информации для аварийной эксплуатации транспортного средства. В этом режиме не работает ЛРУ 154, пульт 142 оператора и БОПИ 141.
Работа пульта 142 оператора в режиме текущей информации о состоянии объектов транспортного средства без БОПИ 141.
При отказе БОПИ 141 и работе пульта 142 оператора в полном режиме на вход ЛРУ 154 поступают сигналы (за исключением аварийных аналоговых сигналов) от аналоговых датчиков 10, 14 и 24, обеспечивающих полную автономную работу пульта 142 оператора в режиме ограниченной системы контроля. Например, добавив информацию от датчиков частоты вращения ДВС и скорости транспортного средства, расширяют информационное поле, обеспечивают дополнительную систему ручного регулирования с выводом на приемную часть 143 информационного поля рекомендации водителю по эксплуатации и формируя защитный сигнал по предельным значениям, отраженным на приемно-передающей части 144 информационного поля. Режим работы сенсорного поля 145, индикатор 146, сенсоров 152 ввода и 153 поиска с поддержкой дисплея 149 и обнаружение неисправности БОПИ 141 по сигналу указателя готовности 151 (сигнал подается на указатель в мигающем режиме "не готов") осуществляется следующим образом. При нажатии сенсора 153 поиска высвечивается на дисплее 149 информация о том, какой из блоков системы не готов к работе, а на цифровом индикаторе 148 - код неисправности этого блока. Работа пульта 142 оператора в режиме ограниченного управления - при отказе БОПИ 141 по "готовности", переключатель 160 режима работы по готовности БОПИ 141 отключает последний от системы управления и переводит в режим ограниченного управления (т.н. защитный режим) от пульта 142 оператора через ЛРУ 154.
Основными функциями ЛРУ 154 являются: прием и обработка информации дискретных и аналоговых каналов ( по сигналам соответствующих датчиков) для формирования информационного и управляющего воздействия по предельным и текущим значениям состояния объектов транспортного средства; приведение кодовой информации от БОПИ 141 в физические величины и формирование текстовой, цифровой, аналоговой и символьной информации на пульте оператора; передача кода и прием информации от оператора и своих внешних датчиков в и из БОПИ 141 соответственно для их обработки; обеспечение автономного информационного поддержания системы контроля и управления.
Режим работы пульта 142 оператора с БОПИ 141.
В дополнение к описанному выше режиму работы пульта 142 оператора при работающем БОПИ 141 от мультиплексорных блоков 8, 21, 31 передается информация с объекта управления соответственно 6, 17 и 27 транспортного средства, обрабатывается в БОПИ 141, и принимается от пульта 142 оператора в БОПИ 141 для работы в соответствии с требованиями оператора.
По запросу оператора через сенсорное поле 145, сенсоры 152 ввода и 153 поиска формируется поблочная (ДВС, ГМП и др.) информация и добавляется информация в виде индикации на приемной части 143 информационного поля, шкальном индикаторе 147, цифровом индикаторе 148, дисплее 149, указателе готовности 151 о состоянии всех объектов и всего транспортного средства в целом.
В автоматическом информационном режиме в зависимости от фазы состояния транспортного средства (стоянка, холостой ход, движение, буксировка и их вариации), совмещенной с действиями оператора (включение насосов различных исполнительных механизмов объектов транспортного средства, включение передачи, и т. д.), информация передается на приемную часть 143 информационного поля, шкальный индикатор 147, цифровой индикатор 148, дисплей 149, аварийные сигнализаторы 150 и указатель готовности 151 пульта 142 оператора.
Объем информации при несанкционированных действиях увеличивается по мере вхождения в режим аварийной ситуации. Например, несанкционированный запуск ДВС при включенной передаче:
приемная часть 143 информационного поля информирует в цвете о необходимости выключения передачи (рекомендация);
если оператор не следует данной рекомендации и продолжает совершать действие (осуществляет запуск насосов ДВС), то высвечивается предупредительная рекомендация в виде информации на аварийных сигнализаторах 150 ("внимание опасность");
при дальнейшем игнорировании предупредительной рекомендации и продолжении совершения этого действия включается дополнительно информация на шкальном индикаторе 147, цифровом индикаторе 148, и дисплее 149;
если игнорируется и эта информация, то срабатывает система аварийной защиты через БОПИ 141, в частности отключение подачи топлива в ДВС.
Режим работы пульта 142 оператора при поиске неисправностей характеризуется тремя критериями:
- по информации приемно-передающей части 144 информационного поля;
- по индикации аварийных сигнализаторов 150;
- по индикаторам 146 сенсорного поля 145 по объектам транспортного средства.
Обнаружение неисправности осуществляется сенсором 153 поиск в автоматическом режиме, поочередно пролистывания неисправную информацию, а на шкальном индикаторе 147, цифровом индикаторе 148, дисплее 149, индикаторах 146 сенсорного поля 145, и приемной части 143 информационного поля высвечивается комплексная информация о состоянии объектов транспортного средства. Комбинирование символьно-текстовой информацией с побочным разбиением позволяет создать резервную информационную систему контроля.
Сенсор 153 поиска в исправном состоянии транспортного средства выполняет функции перелистывания запрограммированной последовательности информации.
Ввод информации для организации контроля производится через сенсор 152 ввода и перевод из режима символьной информации на сенсорном поле 145 в десятичную цифровую информацию, подкрепленную цифровым индикатором 148. Этот же сенсор 152 ввода обеспечивает режим задающего входного воздействия на систему управления ЛЛУ 4, 18 и 28 (фиг.1) или ЛЛУ 4 (фиг.2) через БОПИ 141.
Например, для правильности включения передачи поступают следующим образом на пульте 142 оператора: нажать кнопку на сенсорном поле 145, соответствующую включению ГМП; нажать сенсор 152 ввода; на цифровом индикаторе 148 появляется код перехода в режим управления; набирается код управления (физическая величина) на сенсорном поле 146 и высвечивается на цифровом индикаторе 148; после нажатия сенсора 152 ввода осуществляется включение передачи.
Для аналоговых датчиков если необходимо задать аналоговое состояние (ограниченное), то в пределах допуска сигнала запоминается и задается информация следующим образом:
выбрать параметр путем нажатия сенсора 145 на пульте оператора, например вес груза, скорость машины или другой параметр;
нажать сенсор 152 ввода, при этом если информация задана, то она фиксируется, а если нет, то набрать информацию на сенсором поле 145, соответствующего аналоговому ограничению или состоянию и система воспринимает ее как условие выполнения ограничения по этому параметру.
Работа пульта 142 оператора в режиме "готов".
Данный режим определяется по указателю готовности 151 в зависимости от готовности БОПИ 141, пульта 142 оператора и состояния всех аналоговых и дискретных датчиков и блоков ЛЛУ 4 18, 28 (фиг.1), соответствующих объектов управления транспортного средства или ЛЛУ 4 (фиг.2), общего для нескольких объектов управления транспортного средства: если горит указатель готовности 151 - система исправна; если мигает указатель готовности 151 - система частично исправна.
Определение неисправности осуществляется посредством сенсора 153 поиска и при этом высвечивается на цифровом индикаторе 148 код неисправности и текстовая информация на дисплее 149 о состоянии объекта транспортного средства.
Если не горит указатель готовности 151, то это означает, что весь вычислительный комплекс БОПИ 141 и пульт 142 оператора неисправны. В этом случае осуществляется переход на аварийный режим управления.
Для однозначного восприятия информации, возникающей на пульте 142 оператора приняты следующие цветовые решения и обозначения: горит какой-либо индикатор или поле дисплея, значит идет какая-то информация; мигает - означает призыв к действию; горит красным цветом, означает аварию; горит синим цветом - рекомендацию (цифровую); горит белым цветом - текущую информацию, поступающую от аналоговых датчиков; горит зеленым цветом означает, что произошло пороговое некритическое действие в системе (например, при закрытии жалюзи идет информация о состоянии жалюзи).
Объединенная (интегральная) информация, отраженная на втором участке 159 приемной части 143 информационного поля, представляет собой объединенную для всех агрегатов текущую информацию. Например, на нем указывается "уровень масла" везде по всем объектам транспортного средства, при нажатии на сенсорном поле 145 сенсора, соответствующего определенному объекту, уровень масла указывается соответствующий этому объекту (ГМП, ДВС и др.) транспортного средства.
Применение системы управления и диагностики объектов управления транспортного средства позволяет расширить технические возможности системы за счет обеспечения на базе контрольно-диагностической информации построения комплексной системы управления узлами и механизмами транспортного средства для организации самообучающихся и роботизированных систем (адаптивных) управления транспортным средством, позволяющие получить следующие преимущества:
- обеспечение температурного баланса за счет выбора оптимальной нагрузки и организации системы охлаждения энергетической установки;
- экономия топлива за счет выбора оптимального режима эксплуатации;
- увеличение динамической характеристики за счет оперативного реагирования на изменение внешних факторов, например изменение профиля дороги, структуры дорожного покрытия и т.п.;
- экстренное обнаружение и локализации неисправностей и исключение неисправного блока системы из процесса управления.
Изобретение соответствует критерию промышленная применимость поскольку реализуемо с использованием известных средств производства и применением существующих технологий.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2099206C1 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| Программно-технический комплекс контроля, управления и предиктивной диагностики технологического оборудования подъемно-транспортного механизма | 2021 |
|
RU2770052C1 |
| СПОСОБ И УСТРОЙСТВО КОМБИНИРОВАННОГО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ПЕРЕДАЧИ СИГНАЛОВ РАДИОСООБЩЕНИЙ | 2005 |
|
RU2319211C2 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2348551C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ И ОПЕРАТИВНОГО КОНТРОЛЯ (МОНИТОРИНГА) КРИТИЧЕСКИ ВАЖНЫХ ОБЪЕКТОВ И ТЕРРИТОРИЙ СОЮЗНОГО ГОСУДАРСТВА "РОССИЯ-БЕЛАРУСЬ" | 2006 |
|
RU2338233C2 |
| ТЕЛЕВИЗИОННОЕ СРЕДСТВО НАБЛЮДЕНИЯ | 1993 |
|
RU2094956C1 |
| ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА С СИНХРОННОЙ ПЕРЕДАЧЕЙ ИНФОРМАЦИИ | 2003 |
|
RU2237286C1 |
| Система централизованного управления электроэнергетическим объектом | 1984 |
|
SU1201801A1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2010 |
|
RU2434198C1 |


Изобретение относится к системам автоматического управления узлами и механизмами транспортного средства, а также их контроля и диагностики. Особенностью изобретения является обеспечение на базе контрольно-диагностической информации построения комплексной системы управления узлами и механизмами транспортного средства для организации самообучающихся и роботизированных систем (адаптивных) управления транспортным средством. Это достигается за счет того, что в системе управления и диагностики, имеющей центральный бортовой контроллер и локальное логическое устройство, последнее снабжено мультиплексорным блоком диагностических данных для контролирования и диагностики функционирования объекта управления, первый вход которого соединен с выходом центрального бортового контроллера, соединенного через блок памяти данных с одним из входом управляющего сигнала сумматора. Второй вход мультиплексорного блока диагностических данных соединен с выходом информационного сигнала сумматора, а его выход - одним из входов центрального бортового контроллера. Датчики состояния объекта управления выполнены аналоговым для формирования сигналов состояния объекта управления и дискретным для формирования сигналов соответственно критического и текущего его состояния. При этом аналоговые датчики и дискретные датчики для формирования сигналов критического состояния соединены соответственно с двумя другими входами центрального бортового контроллера, а дискретные датчики для формирования сигналов текущего и критического состояний соединены с соответствующим входом сумматора локального логического устройства. 9 з.п. ф-лы 5 ил.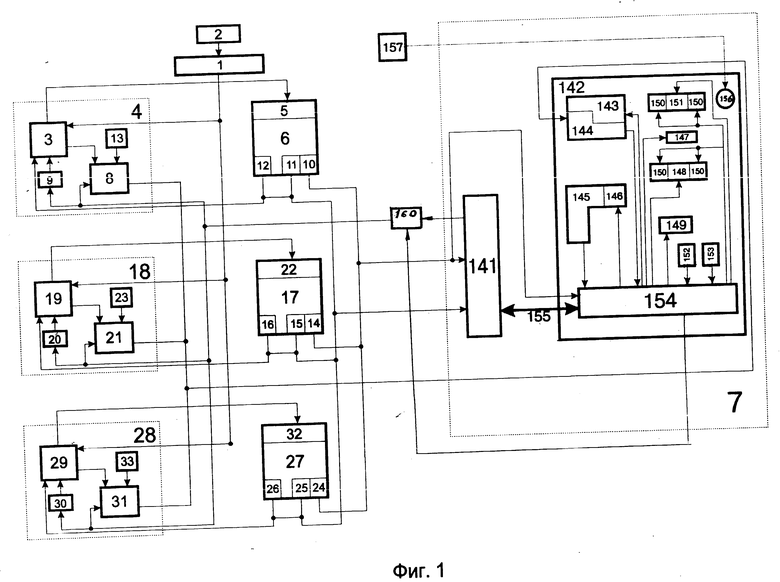
| SU, авторское свидетельство, 1736771, кл.B 60 K 41/16, 1992. |
