Изобретение относится к области связи, а более точно к многофункциональной системе диспетчеризации и мониторинга подвижных и/или стационарных объектов с синхронной передачей информации, и может быть использовано для охраны и сопровождения автомашин, ценных и особо опасных для жизни людей грузов, в корпоративных системах управления, информатизации и охраны крупных фирм, торговых комплексов, банков, контроля за несанкционированным проникновением в жилые и нежилые помещения и т.п.
Существует множество различных систем местоопределения подвижных объектов, в частности глобальная система позиционирования GPS “Навстар”, а также ее российский аналог - система “Глонас”. Эти системы представляют собой группировку спутников, выведенных на околоземную орбиту, каждый из которых определяет с высокой точностью свое местоположение в пространстве по звездам и каждую секунду в высокоточной системе единого для всех спутников времени передает в эфир свои координаты. Приемник, находящийся на Земле, принимает информацию от спутников и измеряет задержку поступления сигнала. Вычислитель приемника решает задачу по определению местонахождения самого приемника в пространстве.
Известна телематическая система, представляющая собой спутниковую систему, содержащую аварийные радиобуи, последовательно включенные бортовое приемное устройство, бортовое запоминающее устройство и бортовой передатчик, второй вход которого соединен с выходом первого бортового приемного устройства, а третий вход - с выходом бортового приемного устройства, последовательно включенные приемное устройство, первое устройство обработки информации, устройство сопряжения с сетями связи, второй вход которого через устройство обработки информации соединен с выходом приемного устройства, устройство контроля и управления и устройство связи поисково-спасательных организаций (см. патент РФ №2027195, кл. G 01 S 5/12, от 04.02.1992 г.).
Однако известное устройство не обладает функциями обеспечения заданной точности местоопределения, достаточно полного анализа, накопления и обработки данных о состоянии наблюдаемых объектов, планирования маршрутов движения подвижных объектов. Кроме того, система диагностики и контроля в известном устройстве недостаточно развита.
По технической сущности наиболее близким к предложенному техническому решению является телематическая система, содержащая сеть терминальных устройств, расположенных на подвижных и/или стационарных объектах, связанных с центром диспетчеризации и мониторинга, каждое указанное терминальное устройство содержит объединенные двунаправленной шиной микроконтроллера приемопередатчик GSM с антенной с подключенными к нему блоками аудиоинтерфейса, приемопередатчик спутниковой системы связи с антенной, приемник системы местоопределения с антенной, блок сопряжения с датчиками первичной информации, блок обработки аналоговых сигналов, блок сопряжения с исполнительными устройствами, основной блок питания, а центр диспетчеризации и мониторинга содержит сервер сообщений спутниковой системы связи, сервер сообщений службы сервиса, N рабочих станций операторов, объединенных в локальную сеть с помощью главного сервера, предназначенного для управления работой указанного центра, формирования команд и сообщений для указанных объектов системы и распределения передаваемой информации, а также радиомодуль GSM с антенной и радиомодуль спутниковой системы связи с антенной, подключенные к серверу сообщений GSM и серверу спутниковой системы связи соответственно, при этом приемопередатчик GSM и приемопередатчик спутниковой системы связи указанных терминальных устройств выполнены с возможностью передачи сообщений на соответствующие радиомодули центра диспетчеризации и мониторинга, а указанные радиомодули центра диспетчеризации и мониторинга предназначены для приема сообщений от множества указанных терминальных устройств объектов системы и передачи команд на указанные объекты системы (см. патент РФ №2173888, кл. G 08 B 25/08, от 09.10.2000 г.).
Однако указанная телематическая система, использующая неуправляемую асинхронную передачу сообщений от терминальных устройств в центр диспетчеризации и мониторинга через сеть подвижной связи (наземную или спутниковую), не позволяет обеспечить гарантированный прием (доставку) сообщений в экстренных случаях в условиях повышенной (может быть локальной) нагрузки сети.
Указанные ситуации могут возникнуть при вызове служб спасения, скорой помощи, пожарной охраны и т.п. в случае, когда нагрузка на сети связи значительно возрастает, например в автомобильных пробках, в процессе больших культурно-массовых мероприятий, в праздничные дни и т.п.
Техническим результатом предлагаемого изобретения является обеспечение надежной передачи выделенной категории сообщений в системах подвижной связи, например GSM, независимо от уровня нагрузки, создаваемой другими категориями абонентов.
Дополнительным техническим результатом является обеспечение регулирования центром управления уровня нагрузки, создаваемой сообщениями терминальных устройств телематической системы за счет дистанционного изменения периода передачи сообщений с терминального устройства, например, для снижения нагрузки на сеть GSM со стороны телематической системы.
Достигается это тем, что в телематической системе, содержащей совокупость терминальных устройств, расположенных на подвижных и/или стационарных объектах системы, связанных через цифровую сеть подвижной связи, например GSM, включающей центр управления цифровой сетью подвижной связи, центр коротких сообщений SMS и/или систему пакетной передачи сообщений - GPRS, с центром диспетчеризации и мониторинга, обеспечивающим прием, накопление, обработку и анализ сообщений от терминальных устройств, формирование и передачу на них необходимых команд и сообщений, каждое терминальное устройство, имеющее микроконтроллер и объединенные общей шиной локальной сети приемопередатчик цифровой сети подвижной связи, приемник спутниковой системы местоопределения, например, типа GPS, блок сопряжения с датчиками первичной информации, блок обработки аналоговых сигналов, блок сопряжения с исполнительными устройствами и блок питания, дополнительно оснащено узлом управления системным кадром, подключенным своим входом-выходом к общей шине локальной сети и выполненным с возможностью формирования системных кадров приемопередачи телематической системы, синхронизированных по сигналам, получаемым от приемника спутниковой системы местоопределения для управления временем передачи сообщений от подвижных и/или стационарных объектов системы, а центр диспетчеризации и мониторинга снабжен подключенными к его двунаправленной шине сервером телематических сообщений, вычислителем параметров системного кадра и сервером управляющей информации, при этом последний взаимосвязан с центром управления цифровой сетью подвижной связи для получения от него команд по изменению временной структуры системного кадра приемопередачи телематической системы при изменении загрузки цифровой подвижной сети в целях обеспечения требуемого качества при передаче сообщений по ее информационным каналам, а сервер телематических сообщений взаимосвязан с центром коротких сообщений или с системой GPRS цифровой сети подвижной связи для передачи команд управления на терминальные устройства, кроме того, узел управления системным кадром содержит генератор тактовых импульсов, управляемый формирователь временных интервалов, управляемый формирователь системного кадра и блок запуска системного кадра, причем первый вход управляемого формирователя временных интервалов, вход блока запуска системного кадра и вход-выход управляемого формирователя системного кадра образуют вход-выход узла управления системным кадром, выход генератора тактовых импульсов подключен ко второму входу управляемого формирователя временных интервалов, выход которого подключен ко входу управляемого формирователя системного кадра, а к третьему входу управляемого формирователя временных интервалов подключен выход блока запуска системного кадра.
Сущность изобретения заключается в следующем.
Во-первых, организована временная синхронизация терминальных устройств от сигналов спутниковой системы местоопределения GPS/Глонас, что обеспечивает синхронную передачу телематических сообщений от терминалов в сеть подвижной связи.
При этом формируется системный кадр (TDMA - кадр телематической системы), содержащий “n” временных окон, в каждом из которых осуществляется передача телематических сообщений от определенной группы абонентов, например корпоративных, принадлежащих одной или нескольким компаниям.
В структуре TDMA-кадра выделяется временное окно или несколько окон, в которых передаются только экстренные сообщения.
Формирование структуры TDMA-кадра определяется центром диспетчеризации и мониторинга, соединенным с центром управления цифровой сетью подвижной связи, в зависимости от текущей общей загрузки в сети, а также нагрузки, создаваемой телематическими сообщениями активных терминальных устройств.
После формирования центром диспетчеризации и мониторинга TDMA-кадра осуществляется программная дистанционная перестройка (по каналам цифровой сети подвижной связи) терминальных устройств, то есть каждое терминальное устройство изменяет время и темп посылки своих телематических сообщений, а также временной интервал для экстренной связи.
Сравнение предлагаемого устройства с ближайшим аналогом позволяет утверждать о соответствии критерию “новизна”, а отсутствие отличительных признаков в аналогах говорит о соответствии критерию “изобретательский уровень”.
Предварительные испытания подтверждают возможность широкого промышленного использования.
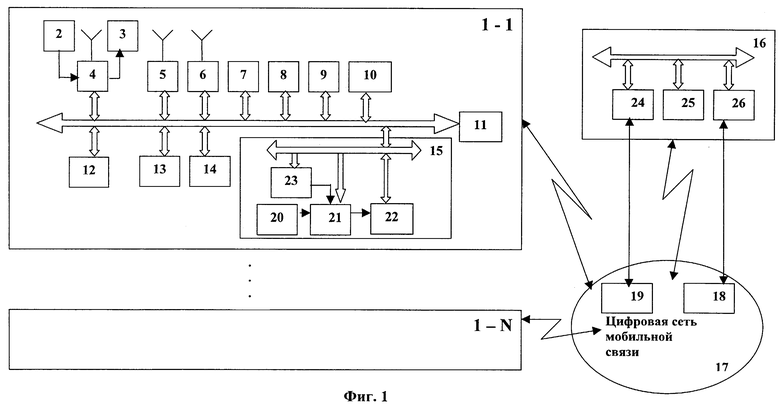
На фиг.1 представлена функциональная блок-схема предложенной телематической системы, а на фиг.2 - временная диаграмма передачи сообщений.
Телематическая система содержит сеть терминальных устройств 1-1...1-N, каждое из которых по аналогии с прототипом может содержать микрофон 2, телефон 3, приемопередатчик 4 GSM с антенной, приемопередатчик 5 спутниковой системы связи с антенной, приемник 6 системы местоопределения GPS (или Глонас) с антенной, блок 7 сопряжения с датчиками первичной информации, блок 8 обработки аналоговых сигналов, блок 9 сопряжения с исполнительными устройствами, обездвиживатель 10 автомашины универсальный, микроконтроллер 11, блок 12 питания от сети переменного тока (например, 220 В), блок 13 питания (основной) от бортовой сети автомобиля и блок 14 автономного резервного питания.
Следует отметить, что в зависимости от различных условий некоторые из вышеперечисленных узлов могут не всегда быть использованы, например в границах Москвы и Московской области не обязателен приемопередатчик 5. При охране жилых помещений может быть не использован обездвиживатель 10.
Каждое терминальное устройство 1-1...1-N дополнительно снабжено узлом 15 управления системным кадром для формирования системных кадров приемопередачи телематической системы, синхронизированных по временным меткам, получаемым от приемника 6 системы GPS, для управления временем и темпом передачи сообщений от подвижных и/или неподвижных объектов системы.
Микроконтроллер 11 с помощью общей шины локальной сети связывает по цепям управления и питания все вышеупомянутые блоки.
Кроме того, телематическая система содержит центр 16 диспетчеризации и мониторинга, выполненный с возможностью обеспечения приема, накопления, обработки и анализа телематических сообщений от терминальных устройств 1-1...1-N, формирования необходимых команд и сообщений для передачи их на подвижные и/или стационарные объекты системы. Терминальные устройства 1-1...1-N связаны с центром 16 диспетчеризации и мониторинга через цифровую сеть 17 подвижной связи, содержащую центр 18 управления цифровой сетью и центр 19 коротких сообщений. Кроме того, цифровая сеть 17 подвижной связи может содержать одну или несколько базовых станций и другое необходимые сервисное оборудование, которое на фиг.1 не представлено.
Узел 15 управления системным кадром может содержать генератор 20 тактовых импульсов, управляемый формирователь 21 временных интервалов, управляемый формирователь 22 системного кадра и блок 23 запуска системного кадра. К указанной общей шине локальной сети микроконтроллера 11 подключены вход-выход блока 15, который образован первым входом управляемого формирователя 21 временных интервалов, входом блока 23 запуска системного кадра и входом-выходом управляемого формирователя 22 системного кадра.
При этом выход генератора 20 тактовых импульсов подключен ко второму входу управляемого формирователя 21 временных интервалов, выход которого подключен ко входу управляемого формирователя 22 системного кадра. К третьему входу управляемого формирователя 21 временных интервалов подключен выход блока 23 запуска системного кадра.
Блок 23 запуска системного кадра служит для формирования начального импульса, потенциала или начальной кодовой команды в зависимости от программы. Блок 23 может быть выполнен в виде цифровой логической схемы типа дешифратора кода, или двухвходового элемента И, или в виде программного модуля, записанного в микроконтроллер 11. Блок 23 формирует метку времени, соответствующую началу каждого системного кадра.
Управляемый формирователь 21 временных интервалов может быть выполнен в виде последовательно соединенных элемента И и управляемого счетчика, на первый вход (представляющий собой совокупность параллельных его входов) которого предварительно поступает параллельный код длительности временного интервала, на второй вход - тактовые импульсы с генератора 20 и на третий вход - разрешение от блока 23 на начало счета. При этом второй и третий входы управляемого формирователя 21 являются входами элемента И.
Управляемый формирователь 22 системного кадра может содержать счетчик временных интервалов, вход которого является входом управляемого формирователя 22, а разрядные выходы через компаратор кодов, например, на элементах И-ИЛИ-НЕ подключены к входу-выходу управляемого формирователя 22, к которому подключены разрядные входы компаратора (на фиг.1 не показаны).
Центр 16 диспетчеризации и мониторинга, по аналогии с прототипом, может содержать радиомодуль GSM, подключенный к серверу сообщений GSM, радиомодуль спутниковой системы связи с антенной, например, системы Орбком, подключенный к серверу сообщений спутниковой системы связи Орбком, сервер сообщений службы сервиса SMS, WEB сервер, главный и резервный серверы и рабочие станции операторов, объединенные в локальную сеть с помощью главного сервера, а также блок питания (не показаны).
Центр 16 диспетчеризации и мониторинга снабжен подключенными к его двунаправленной шине (локальной сети) сервером 24 телематических сообщений, вычислителем 25 параметров TDMA-кадра телематической системы и сервером 26 управляющей информации, причем последний взаимосвязан с центром 18 управления цифровой сетью подвижной связи для получения от него команд по изменению параметров системного кадра приемопередачи телематической системы в зависимости от уровня загрузки цифровой подвижной сети 17, в целях обеспечения требуемого качества при передаче сообщений по информационным каналам, а сервер 24 телематических сообщений взаимосвязан с центром 19 коротких сообщений цифровой сети 17 подвижной связи для передачи команд управления на терминальные устройства 1-1...1-N.
В качестве серверов и рабочих станций операторов центра 16 диспетчеризации и мониторинга, а также вычислителя 25 параметров системного кадра и центров 18 и 19 могут быть использованы ПЭВМ типа IBM PC, укомплектованные периферийным оборудованием и, при необходимости, средствами сбора и передачи информации.
Приемопередатчик 4 может быть выполнен, например, в виде модема сотовой телефонной связи стандарта GSM Siemens Module M20.
Приемник 6 может быть выполнен, например, в виде навигационного приемника спутниковой радионавигационной системы GPS NAVSTAR модели Trimble Lassen LP или Rockwell Jupiter (Jupiter LP).
В качестве блоков 7-9 могут быть использованы узлы типа АЦП и ЦАП или другие узлы цифроаналоговой техники.
Двунаправленной шиной микроконтроллера 11 объединены в локальную сеть приемопередатчики 4, 5, приемник 6, блоки 7-9 и обездвиживатель 10, а также блоки 12, 13 питания от сети переменного тока и от бортовой сети подвижного объекта, и блок 14 автономного резервного питания. Дополнительно введенный блок 12 питания может быть использован при работе терминального устройства в лабораторных условиях.
Микроконтроллер 11 обеспечивает обмен информацией с модемом сотовой связи - приемопередатчиком 4 GSM, навигационным приемником 6 GPS, блоками 7-9 сопряжения с датчиками первичной информации, обработки аналоговых сигналов и сопряжения с исполнительными устройствами и с блоками 2 и 3 аудиоинтерфейса.
Микроконтроллер 11 может быть выполнен, например, на базе двух “8-ми” разрядных микроконтроллеров AT MEGA 103 фирмы ATMEL, при этом один принимает и обрабатывает информацию, поступающую от модема сотовой связи - приемопередатчика 4 GSM или от приемопередатчика 5 (например, типа Орбком), подготавливает информацию для передачи и управлеяет работой всего устройства в целом, а другой обрабатывает информацию, поступающую от приемника 6 GPS, от внешних цифровых и аналоговых линий, формирует и передает команды на внешние линии, осуществляет контроль за работой источников питания.
В состав микроконтроллера 11 входят ОЗУ, например, емкостью “32” Кбайт, для хранения оперативных данных для работы программ процессоров, а также энергонезависимая флэш-память (например, емкостью “4” Мбайт) для хранения параметров режима работы терминального устройства и фиксации журнала его работы.
Устройство работает следующим образом.
В журнал работы каждого терминального устройства 1-1...1-N записываются все команды и сообщения, принимаемые из центра 16 диспетчеризации и мониторинга, а также сообщения, передаваемые из каждого терминального устройства 1-1...1-N в центр 16 диспетчеризации и мониторинга. Для подвижных терминальных устройств в журнале работы дополнительно записываются координаты маршрута транспортного средства.
Микроконтроллер 11 может работать в двух основных режимах: режиме полного энергопотребления и в режиме пониженного энергопотребления (“ждущем” режиме).
В каждом терминальном устройстве 1-1...1-N объекта, обслуживаемого системой, микроконтроллер 11 передает и получает по двунаправленной общей шине локальной сети сигналы управления и данные о подключенных к этой шине указанных выше составных частей терминального устройства.
Работа микроконтроллера 11 происходит в соответствии с записанной в его памяти программой. Приемник 6 GPS или Глонас принимает сигналы от спутников одной из глобальных систем позиционирования и вычисляет координаты объекта (например, “1” раз в секунду). Данные о координатах либо накапливаются в памяти микроконтроллера 11, либо с заданной по программе периодичностью передаются на центр 16 диспетчеризации и мониторинга через приемопередатчик 4 GSM или, при отсутствии связи по этому каналу (например, при выходе подвижного объекта из зоны обслуживания GSM), через приемопередатчик 5 спутниковой системы связи, переключение на который производится автоматически по соответствующим командам микроконтроллера 11. Таким образом, связь терминального устройства с центром 16 диспетчеризации и мониторинга не нарушается (обеспечивается) в любой точке земного шара.
Через блок 7 сопряжения терминальное устройство получает сигналы от датчиков, например, охранной сигнализации объектов.
При срабатывании любого из датчиков соответствующие сигналы поступают через блок 7 на шину микроконтроллера 11 и после обработки в нем сообщение через приемопередатчик 4 GSM или приемопередатчик 5 спутниковой системы связи передается в соответствующий радиомодуль центра 16 диспетчеризации и мониторинга.
С помощью блока 8 обработки аналоговых сигналов производится контроль аналоговых параметров объекта, при этом при выходе значений этих параметров за диапазон их допустимых значений блок 8 выдает соответствующий сигнал на микроконтроллер 11, который затем передает сообщения в центр 16 диспетчеризации и мониторинга, аналогично тому как это делается при срабатывании охранной сигнализации.
С помощью блока 9 сопряжения с исполнительными устройствами микроконтроллер 11 может управлять исполнительными устройствами объекта, в том числе устройствами его охраны, по командам, полученным через приемопередатчики 4 или 5 (GSM или Орбком) по соответствующим каналам связи от центра 16 диспетчеризации и мониторинга.
С помощью блоков 2 и 3 аудиоинтерфейса (микрофона и телефона) производится обмен речевыми сообщениями объекта с центром 16 диспетчеризации и мониторинга. При этом связь с центром может осуществляться непосредственно через приемопередатчик 4 GSM с антенной (или через спутниковый канал - через приемопередатчик 5).
Блоки 13 и 14 питания обеспечивают непрерывную работу терминального устройства. Работа этих блоков управляется микроконтроллером 11. При нарушении работы основного блока 13, например при нарушении сети питания объекта, питание терминального устройства переключается на резервный блок 14. При этом микроконтроллер 11 управляет зарядом и разрядом батареи блока 14 и в зависимости от остаточной емкости батареи микроконтроллер 11 может изменять параметры системного кадра по запрограммированному алгоритму, продлевая длительность автономной работы блока 14 питания, а следовательно, и всего терминального устройства.
Работа центра 16 диспетчеризации и мониторинга заключается в приеме через радиомодуль GSM или радиомодуль спутниковой связи сообщений от всех терминальных устройств объектов системы, накоплении, обработке и анализе этих сообщений на соответствующих серверах, а также передаче необходимых команд через радиомодули на объекты системы в соответствии с программами серверов. Один из серверов 24 принимает короткие сообщения непосредственно от центра 19 коротких сообщений по любому доступному каналу связи, например, по проводному или оптоволоконному каналу. Другой сервер получает и отправляет сообщения в сеть “Интернет”, организуя дополнительный канал связи.
При этом главный и резервный серверы центра 16 обеспечивают управление работой центра 16 диспетчеризации и мониторинга, ведение баз данных, обработку GPS информации, подготовку электронных карт, ведение геоинформационной базы данных, распределение информационных потоков между рабочими станциями операторов, отображение местоположения объектов на электронных картах на экранах мониторов этих рабочих станций, формирование команд и сообщений, передаваемых затем на объекты системы, распределение передаваемой информации по серверам в зависимости от выбранного канала передачи (GSM или Орбком). При работе центра 16 диспетчеризации и мониторинга рабочие станции операторов используются для обеспечения наблюдения и обслуживания каждым оператором соответствующей части сети терминалов объектов системы, при этом операторы передают сообщения объектам и, при необходимости, устанавливают с объектом двухстороннюю речевую связь через канал сотовой или спутниковой связи.
При отсутствии изменения загрузки цифровой сети 17 подвижной связи узел 15 формирует системный кадр (см. фиг.2) с заранее заданными параметрами и с длительностью системного кадра, равной
T×(n+m),
где Т - временной интервал;
n - количество групп абонентов системы;
m - количество резервных временных интервалов (для приема команд управления и других целей).
На фиг.2 показан частный случай, когда m=2, а через Кi, где 1≤i≤n, обозначено количество абонентов в каждой из n групп. В бщем случае суммарное число абонентов в системе равно  .
.
При возрастании/снижении загрузки цифровой сети 17 подвижной связи центр 18 управления цифровой сетью подвижной связи передает на сервер 26 центра 16 команду управления параметрами системного кадра абонентов телематической системы. В соответствии с полученной командой вычислитель 25 параметров системного кадра проводит необходимые вычисления и передает через сервер 24 телематических сообщений центра 16 скорректированные параметры системного кадра на сервер 19 коротких сообщений, который передает далее полученную информацию на приемопередатчик 4 каждого из терминальных устройств 1-1...1-N объектов телематической системы.
Полученная каждым терминальным устройством информация обрабатывается микроконтроллером 11, и в управляемый формирователь 21 временных интервалов записываются соответствующие коды, формирующие временной интервал системного кадра.
На вход управляемого формирователя 22 поступают временные интервалы от управляемого формирователя 21 и по командам от микропроцессора 11 формируют соответствующую структуру системного кадра или изменяют ее.
Кроме того, при необходимости, по команде из центра 16 диспетчеризации и мониторинга может быть изменен порядок предоставления временных интервалов группам абонентов телематической системы. Например, для организации приоритета передачи сообщений для одной из групп абонентов системы возможно предоставление дополнительных из n временных интервалов системного кадра.
При этом указанная команда из сервера 24 телематических сообщений поступает на центр 19 коротких сообщений, который передает ее на приемопередатчик 4 терминальных устройств 1-1...1-N. Полученная информация обрабатывается микроконтроллером 11 и соответствующий код по системной шине передается на запись в блок 23.
Таким образом, в предлагаемом устройстве обеспечивается надежная передача выделенной категории сообщений независимо от уровня нагрузки, создаваемой другими категориями абонентов, а также обеспечивается управление уровнем нагрузки, создаваемой терминалами телематической системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА | 2000 |
|
RU2173888C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПЕРЕДВИГАЮЩЕГОСЯ ОБЪЕКТА | 2005 |
|
RU2302662C1 |
| Дистанционная система передачи данных для безопасного скармливания грубых кормов пастбищным животным | 2019 |
|
RU2719781C1 |
| ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА ВИЗУАЛЬНОГО И АППАРАТНОГО МОНИТОРИНГА | 2006 |
|
RU2329543C1 |
| ТЕЛЕМАТИЧЕСКИЙ ОХРАННО-ПРОТИВОУГОННЫЙ КОМПЛЕКС | 2002 |
|
RU2198105C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ МАРШРУТИЗИРОВАННЫМ ТРАНСПОРТОМ | 2005 |
|
RU2305326C2 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И ПЕРЕДВИЖЕНИЯ ПЕРСОНАЛА | 2010 |
|
RU2442220C1 |
| СИСТЕМА МОНИТОРИНГА И ОХРАНЫ ПОДВИЖНЫХ ОБЪЕКТОВ ОТ НЕСАНКЦИОНИРОВАННОГО ВОЗДЕЙСТВИЯ | 2007 |
|
RU2352996C1 |
| СИСТЕМА МОНИТОРИНГА ЛОКОМОТИВНЫХ РАДИОСТАНЦИЙ ЦИФРОВОЙ СИСТЕМЫ РАДИОСВЯЗИ НА ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ | 2009 |
|
RU2407243C1 |

Изобретение относится к области систем связи. Терминальные устройства расположены на подвижных и/или стационарных объектах системы, связанных через цифровую сеть подвижной связи, например GSM, с центром диспетчеризации и мониторинга, обеспечивающим прием, накопление, обработку и анализ сообщений от терминальных устройств, формирование и передачу на них необходимых команд и сообщений. Цифровая сеть подвижной связи включает в себя центр управления цифровой сетью подвижной связи, центр коротких сообщений SMS и/или систему пакетной передачи сообщений-GPRS. Каждое терминальное устройство, имеющее объединенные общей шиной локальной сети приемопередатчик цифровой сети подвижной связи, приемопередатчик спутниковой системы связи Орбком с антенной, приемник системы местоопределения GPS, блоки сопряжения, блоки обработки аналоговых сигналов и основной блок питания, дополнительно оснащено узлом формирования системных кадров приемопередачи, выполненным с возможностью синхронизации системных кадров по сигналам, получаемым от приемника спутниковой системы местоопределения типа GPS, и управления временем передачи сообщений. Центр диспетчеризации и мониторинга снабжен сервером сообщений цифровой сети подвижной связи, вычислителем параметров системного кадра и сервером управляющей информации, который связан с центром управления цифровой сетью подвижной связи для получения от него команд по изменению параметров системного кадра приемопередачи при изменении загрузки цифровой подвижной сети. Данная система обеспечивает надежную передачу выделенной категории сообщений в системах подвижной связи независимо от уровня нагрузки, создаваемой другими категориями сообщений.1 з.п. ф-лы, 1 ил.
| ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА | 2000 |
|
RU2173888C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 1992 |
|
RU2027195C1 |
| ТЕЛЕМАТИЧЕСКАЯ ОХРАННО-ПРОТИВОУГОННАЯ СИСТЕМА | 2002 |
|
RU2195406C1 |
| СИСТЕМА МОНИТОРИНГА, ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ И ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ ОТ НЕСАНКЦИОНИРОВАННОГО ВОЗДЕЙСТВИЯ | 2000 |
|
RU2155684C1 |

