Изобретение относится к микроманипуляторной технике и может быть использовано для создания устройств для отбора микросфер, напыления и контроля мишеней для лазерного термоядерного синтеза или контроля шариков для подшипников.
При подготовке мишеней для ЛТС приходится проводить отбор и измерение параметров микросфер, напыление и контроль качества поверхности. Все эти операции требуют вращения сфер по заданному закону.
Известен способ манипулирования объектами, заложенный в устройстве, заявленном в [1] По известному способу объекту придают вращательное и поступательное движение двумя электромоторами, размещенными под углом 90o друг относительно друга. Известный способ не позволяет обеспечивать движение объекта по заданному закону.
Наиболее близким техническим решением является способ, осуществляемый на манипуляторе (B. W. Wensteinatal. Rev. Sci Instr. v 49, N 6, p 870, 1987) и аналогичном ему манипуляторе для сферических объектов [2] По известному способу сферический объект размещают и поджимают к двум поверхностям, которые приводят в движение. Сфера, зажатая между двух поверхностей в двух диаметрах на противоположных точках, при движении поверхностей вращается. Сферу можно вращать по заданному закону.
Однако скорость вращения сферы ограничена скоростью возвратно-поступательного движения двух столиков в противоположных направлениях. Относительно большой размер опорных поверхностей (не менее 3,5 диаметра) и их параллельное расположение значительно ограничивают доступ к поверхности сферы и затрудняют установку сферы и ее снятие, так как необходимо сначала раздвинуть плоскости, ввести сферу, затем, сдвинув плоскости, зажать сферу, и наоборот.
Новым техническим результатом является расширение функциональных и технологических возможностей манипулятора и повышение скорости вращения сфер.
Указанный технический результат достигается тем, что сферу (см. чертеж) поджимают к двум опорным поверхностям 2 и 3, не связанным друг с другом, плоским или имеющим кривизну сферическую, цилиндрическую или произвольной формы. Угол, образованный радиусами из центра сферы к точкам касания ее с опорными поверхностями, должен быть больше 0o, но меньше 180o. Поджатие сферы к опорным поверхностям осуществляют электрическими, магнитными, гравитационными силами или гидравлическим или пневматическим давлением потока жидкости или газа.
Устойчивое положение сферы, опирающейся только на две точки опоры, достигают либо за счет близкого расположения центра источника поджимающей силы относительно центра сферы, либо за счет кривизны опорных поверхностей (одной или обеих), либо за счет определенной формы потока жидкости (газа), таких, что отклонение сферы от положения равновесия вызывает появление силы, возвращающей сферу в положение равновесия. Радиус кривизны участка поверхности, перпендикулярного плоскости ОАВ, в области касания сферы Rпов должен быть больше радиуса сферы Rпов>R, если он направлен в ту же сторону, что и радиус сферы к точке касания. Если направление радиуса кривизны поверхности противоположно радиусу сферы в точке касания, то в этом случае должно выполняться условие:
/HR/</Rпов/+/R/
где Rпов радиус кривизны опорной поверхности в точке касания,
R радиус сферы,
HR проекции расстояния от центра источника поджимающей силы до центра сферы на рассматриваемое направление радиуса сферы к точке касания.
Вращение сферы осуществляют непрерывным, импульсно-периодическим или эллиптическим движением одной опорной поверхности 2 (3) или одновременно обеих таким образом, что при непрерывном движении скорость поверхности в точке касания направлена перпендикулярно плоскости, проходящей через радиусы OA и OB (плоскость OAB), а при импульсном или периодическом движении поверхность в точке касания движется либо перпендикулярно плоскости OAB либо совершает круговые, эллиптические или линейные колебания.
Непрерывное движение поверхности в точке касания можно осуществить прямолинейным или вращательным движением поверхности A (B). При указанных направлениях движения одной из поверхностей сфера вращается относительно оси, проходящей через центр сферы и вторую точку касания. В этом варианте отсутствует проскальзывание сферы относительно поверхности касания. Возможны и другие направления движения поверхностей в точках касания кроме указанных. В этом случае появляется проскальзывание в этой точке касания, где меньше сила трения скольжения, что в некоторых случаях позволяет создавать другие направления вращения.
Независимость движения опорных поверхностей друг от друга позволяет задавать и осуществлять любой требуемый закон вращения сферы. Опорные поверхности можно выполнить существенно меньше диаметра манипулируемой сферы, например при колебательном движении или в виде тела вращения при их вращательном движении.
Малые размеры опорных поверхностей и широкий диапазон их пространственного расположения (угол α находится в диапазоне 0°< α < 180°) увеличивают пространство для доступа к поверхности сферы для размещения контролирующих устройств и облегчают постановку сферы в рабочее положение. Постановка и снятие сферы могут осуществляться без перемещения опорных поверхностей просто включением и выключением откачки, а при постановке манипулируемой сферы она всегда автоматически встает в одно и то же положение равновесия.
Расположение центра источника поджимающей силы в плоскости центрального угла, внутри его пределов и на определенном расстоянии обеспечивает автоматическую постановку манипулируемой сферы в одно и то же положение и ее нахождение в процессе манипуляций в том же положении равновесия. Возможность быстрого и управляемого движения опорных поверхностей, например, при их колебательном движении или при их вращении обеспечивают высокую скорость вращения сферы и управляемое ее движение по заданному закону.
Указанная совокупность признаков обеспечивает технический результат - расширяет функциональные возможности манипулятора и увеличивает скорость вращения сферы.
Предлагаемый способ поясняется чертежом, где: 1 манипулируемая сфера, 2, 3 опорные поверхности.
Реализован способ следующим образом: подносимая сфера 1 с некоторого расстояния захватывается потоком воздуха при вакуумировании отверстия и поджимается к опорным поверхностям, автоматически вставая в нужное место - положение равновесия. При этом сфера с опорными поверхностями имеет только две точки касания. Вращение или колебания опорных поверхностей заставляют сферу вращаться в требуемом направлении. В исследованных устройствах угол AOB составлял 90o. Регулируя амплитуду колебаний или скорость вращения опорных поверхностей, изменяли скорость вращения сферы от 0 до 200-300 об/с и меняли направление оси вращения сферы во всем диапазоне углов от 0o до 360o. Для снятия сферы с устройства достаточно перекрыть откачку, и сфера под действием силы тяжести покидает устройство.
Использование предложенного способа обеспечивает по сравнению с существующими следующие преимущества:
удобство постановки и снятия сферы в устройстве,
автоматическую постановку сферы в нужное положение,
повышение скорости манипулирования,
малые колебания центра сферы при ее вращении,
широкий доступ к поверхности сферы для ее контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ СФЕРИЧЕСКИМ ОБЪЕКТОМ | 1996 |
|
RU2109621C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ СФЕРИЧЕСКИМ ОБЪЕКТОМ | 1996 |
|
RU2105662C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ СФЕРИЧЕСКИМ ОБЪЕКТОМ | 1996 |
|
RU2110398C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ СФЕРИЧЕСКИМ ОБЪЕКТОМ | 1996 |
|
RU2105664C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ СФЕРИЧЕСКИМ ОБЪЕКТОМ | 1996 |
|
RU2110397C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
| ИНЕРЦИОННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 1998 |
|
RU2145747C1 |
| МНОГОЛУЧЕВОЙ ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ СФЕРИЧЕСКОЙ ОБОЛОЧКИ | 1998 |
|
RU2159406C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СЛОЯ МЕТАЛЛА | 2000 |
|
RU2190037C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕЙСТВИТЕЛЬНЫХ РАЗМЕРОВ ПАРАМЕТРОВ ВНУТРЕННИХ ПОВЕРХНОСТЕЙ И РАДИУСОВ СФЕРИЧЕСКИХ ИЗДЕЛИЙ | 1999 |
|
RU2188388C2 |
Способ манипулирования сферическим объектом может быть использован при отборе микросфер, напылении и контроле мишений для лазерного термоядерного синтеза или для контроля шариков для подшипников. К двум опорным поверхностям прижимают сферический объект посредством прикладывания к нему от внешнего источника силы. Опорные поверхности приводят в движение. Источник сил, действующих на сферический объект, размещен так, что центр поджимающих сил располагается внутри и в плоскости центрального угла α , образованного радиусами, проведенными из центра сферического объекта к точкам касания ими опорных плоскостей. Опорные поверхности выполняют с произвольной кривизной и располагают так, чтобы величина угла α нахолилась в пределах 0° < α < 180° Радиус кривизны участка опорной поверхности, перпендикулярной плоскости угла α , в точке касания со сферическим объектом больше радиуса сферического объекта при их однонаправленности, а при разнонаправленности указанные величины связаны предложенным соотношением. Рассмотрены варианты возможного характера движений опорных поверхностей. 3 з.п. ф-лы, 1 ил.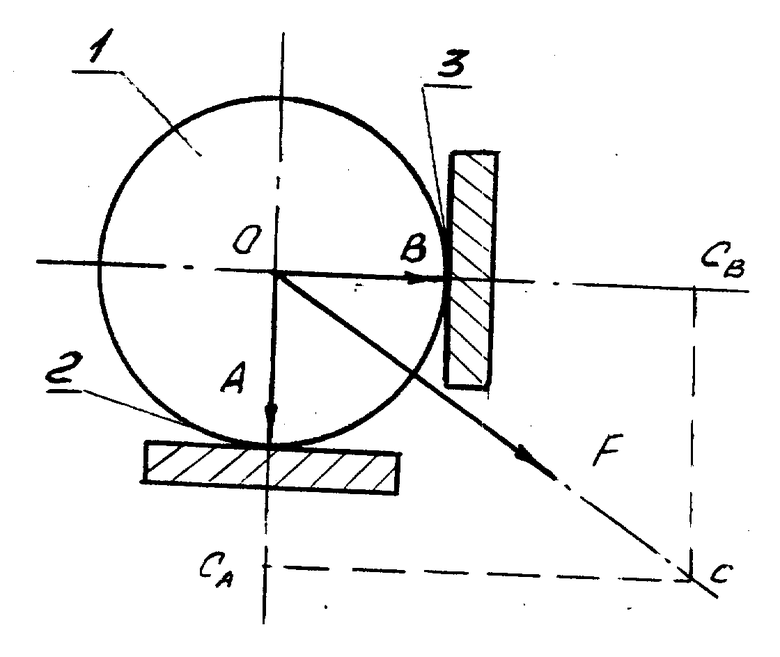
HR < Rп о в + R,
где R радиус сферы;
Rп о в радиус кривизны опорной поверхности в точке ее касания со сферическим объектом;
HR проекция расстояния от центра поджимающих сил до центра сферического объекта на каждый из радиусов, ограничивающий центральный угол α.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| FR, патент, 2115822, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1366385, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |

