Изобретение относится к микроманипуляторной технике и может быть использовано при отборе микросфер наполнения и контроле мишеней для лазерного термоядерного синтеза или при контроле шариков для подшипников.
При подготовке мишеней для ЛТС приходится проводить отбор и измерение параметров микросфер, напыление и контроль качества поверхности. Все эти операции требуют вращения сфер по заданному закону.
Однако он обладает ограниченными функциональными возможностями.
Наиболее близким техническим решением является манипулятор для сферических объектов [1]. Манипулятор состоит из двух поверхностей, соединенных со столиками, двигающимися во взаимно противоположных направлениях. Сфера, зажатая между двумя поверхностями и двумя диаметрально противоположными точками, при движении поверхностей вращается. Манипулятор может вращать сферу по заданному закону.
Однако скорость вращения сферы ограничена скоростью возвратно-поступательного движения двух столиков в противоположных направлениях. Относительно большой размер опорных поверхностей (не менее 3,5 диаметров) и их параллельное расположение значительно ограничивают доступ к поверхности сферы и затрудняют установку сферы и ее снятие, так как необходимо сначала раздвинуть плоскости, ввести сферу, затем, сдвинув плоскости, зажать сферу и наоборот.
Новым техническим результатом предлагаемого изобретения является расширение функциональных и технологических возможностей манипулятора и повышение скорости вращения сфер.
Технический результат достигается тем, что в устройстве для манипулирования сферическими объектами, содержащем две опорные поверхности, дополнительно введен прижим с отверстием, соединенный с устройством откачки жидкости или газа, при этом диаметр отверстия должен быть меньше диаметра манипулируемой сферы, опоры установлены на вибраторах, причем сфера имеет с опорами только две точки касания, которые расположены по разные стороны оси отверстия, точка пересечения нормалей к точкам касания соответствует центру манипулируемой сферы, а угол между нормами должен находится в пределах 0o < α < 180o.
Колебания определенной формы и направления одной опоры вызывают вращение сферы относительно одной оси, а колебания другой опоры вызывают вращение сферы по другой оси. Направление оси вращения сферы при одновременном колебании обеих опор является суммой двух вращений. Скорость и направление оси вращения сферы по любому желаемому закону будут изменяться при изменении амплитуды и фазы колебаний той или другой опоры.
При колебательном движении опоры можно выполнить существенно меньше диаметра манипулируемой сферы. Малые размеры опорных поверхностей опор и широкий диапазон их пространственного расположения (угол α находится в диапазоне 0o < α < 180o) увеличивают пространство для доступа к поверхности сферы для размещения контролирующих устройств и облегчают постановку сферы в рабочее положение. Постановка и снятие сферы могут осуществляться просто включением и выключанием откачки, а при постановке манипулируемой сферы она всегда автоматически встает в одно и то же положение равновесия.
Расположение опор таким образом, что центральный угол α меньше 180o, но не равен 0o, обеспечивает более широкий доступ к поверхности манипулируемой сферы, устраняет необходимость перемещения опор при постановке и снятии манипулируемой сферы.
Расположение отверстия для поджатия сферы внутри угла α обеспечивает автоматическую постановку манипулируемой сферы в одно и то же положение равновесия.
Оптимальная частота и регулируемая амплитуда колебаний опор, установленных на вибраторах, обеспечивают большую скорость вращения сферы и управляемое ее движение по заданному закону.
Указанная совокупность признаков обеспечивает технический результат - расширяет функциональные возможности манипулятора и увеличивает скорость вращения сферы.
На чертеже представлено предлагаемое устройство.
Для исследования возможностей было собрано устройство для манипулирования сферическими объектами. Устройство содержит две опоры 1 и 2, установленные на вибраторах 5. Между опорными поверхностями расположен прижим с отверстием 3, соединенный с устройством откачки 4.
Работает устройство следующим образом. Подносимая сфера 6 с некоторого расстояния захватывается потоком воздуха при вакуумировании отверстия 3 и поджимается к опорам 1 и 2, автоматически вставая в нужное место - положение равновесия. При этом сфера с опорами имеет только две точки касания: A на поверхности 1 и B на поверхности 2. Создаваемые вибраторами 5 необходимая форма и направление колебаний опор заставляют сферу вращаться в требуемом направлении. В исследованном устройстве угол AOB составлял ≈ 90o. В качестве вибраторов применены пьезопреобразователи. Регулируя амплитуду колебаний, изменяли скорость вращения сферы от 0 до ≈100 об/с и меняли направление оси вращения сферы во всем диапазоне углов от 0 до 360o. Для снятия сферы с устройства достаточно перекрыть откачку и сфера под действием силы тяжести покидает устройство.
Использование предложенного устройства обеспечивает по сравнению с существующими следующие преимущества:
- удобство постановки и снятия сферы в устройстве;
- автоматическую постановку сферы в нужное положение;
- малые колебания центра сферы при ее вращении;
- широкий доступ к поверхности сферы для ее контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ СФЕРИЧЕСКИМ ОБЪЕКТОМ | 1996 |
|
RU2110397C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ СФЕРИЧЕСКИМ ОБЪЕКТОМ | 1996 |
|
RU2110398C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ СФЕРИЧЕСКИМ ОБЪЕКТОМ | 1996 |
|
RU2105662C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ СФЕРИЧЕСКИМ ОБЪЕКТОМ | 1996 |
|
RU2105664C1 |
| СПОСОБ МАНИПУЛИРОВАНИЯ СФЕРИЧЕСКИМ ОБЪЕКТОМ | 1996 |
|
RU2105663C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
| УЗЕЛ СОЕДИНЕНИЯ КРЕСТОВИНЫ С ВАЛОМ ТУРНИКЕТА | 1997 |
|
RU2135728C1 |
| УСТАНОВКА ДЛЯ ПЛАЗМЕННОГО НАПЫЛЕНИЯ | 2000 |
|
RU2190035C2 |
| ИНЕРЦИОННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 1998 |
|
RU2145747C1 |
| СПОСОБ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ИЗДЕЛИЙ | 2000 |
|
RU2191993C2 |
Устройство для манипулирования сферическими объектами предназначено для отбора микросфер, напыления и контроля мишеней для лазерного термоядерного синтеза или для контроля шариков для подшипников. Устройство содержит две опоры, связанные каждая со своим приводом, выполненным в виде вибраторов. Между опорами расположен прижим с отверстием, соединенный с устройством откачки жидкости или газа. Опоры расположены под углом друг относительно друга и по разные стороны относительно оси отверстия прижима. Направление и скорость вращения сферы зависят от амплитуды и фазы колебаний каждой из опор. 1 ил.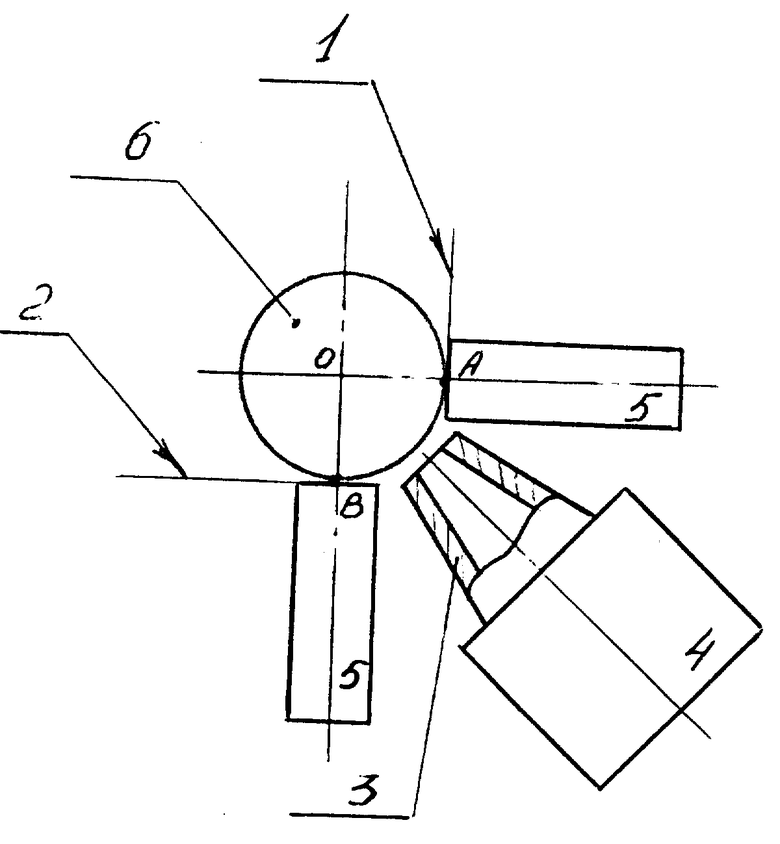
Устройство для манипулирования сферическим объектом, содержащее привод и две опоры, одна из которых связана с упомянутым приводом, отличающееся тем, что оно снабжено приводом второй опоры, прижимом для сферического объекта, выполненным с отверстием, связанным с прижимом устройством для откачки жидкости или газа через отверстие прижима, при этом опоры расположены под углом одна к другой и по разные стороны оси отверстия прижима, а привод каждой опоры выполнен в виде связанного с ней вибратора.
| SU, авторское свидетельство, 1366385, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
