Изобретение относится к робототехнике и может быть использовано в конструкциях манипуляторов, где требуется вращение деталей по сложным сферическим траекториям, например, для контроля толщины деталей ультразвуковым датчиком или сварки, резки, поверхностной закалки и т.п.
Известен манипулятор-платформа по а. с. 1821354, кл. B 25 J 9/08, 15.05.95, опуб. в БИ 29 от 20.10.97, содержащий сферический электромеханизм с дуговыми электродвигателями и платформой, смонтированной с возможностью вращения.
Недостатком известного манипулятора-платформы является то, что он обеспечивает вращение вокруг нескольких осей, проходящих через центр сферы только для деталей, выполненных в форме полусферы. Детали, выполненные в виде полной сферы, он может вращать только вокруг одной оси, перпендикулярной к поверхности платформы.
Известный микроманипулятор, по а. с. 933449, кл. B 25 J 7/00, от 10.06.80, опубл. БИ 21, 07.06.82, содержит неподвижное основание и два привода, первый из которых включает каретку, а второй - держатель, при этом каретка установлена на неподвижном основании.
Недостатком данного микроманипулятора является его сложная конструкция. Так, для вращения детали в виде сферы в нем используются четыре привода, каждый из которых включает каретку. Кроме того, два привода снабжены держателями. Один из держателей смонтирован на кронштейне. Эти же два привода соединены пантографом, ось шарнира которого закреплена на основании. Такое выполнение микроманипулятора оправдано при использовании его для вращения сфер небольшого диаметра, например микросфер диаметром меньше 1 мм. В случае вращения сфер, диаметр которых, например, на два порядка больше, такое выполнение микроманипулятора нецелесообразно. Для осуществления вращения таких сфер без ухода центра необходимо использование высокоточных движителей. Применение пьезокерамических движителей для вращения сфер с большим диаметром невозможно.
Задачей, решаемой данным изобретением, является упрощение конструкции.
Технический результат, достигаемый при использовании настоящего изобретения, заключается в совмещении центра сферы детали, устанавливаемой на манипуляторе, с центром вращения приводной кинематической пары путем выполнения в одном из ее звеньев ложемента для детали. Этим обеспечена возможность подвода различных точек на наружной поверхности детали к технологическому инструменту, например к ультразвуковому датчику, сварочной головке, плазменному резаку или лазерной установке, применяемому совместно с манипулятором, путем чередования попеременно дискретного поворота (качания) детали на заданный угол вокруг горизонтальной оси с дискретным поворотом (вращением) ее вокруг других осей. Использование данного изобретения обеспечивает вращение как полной сферической детали, так и не полной, например, выполненной в виде полого сферического сегмента, вокруг нескольких осей, проходящих через центр сферы. Для того чтобы установить деталь, выполненную в виде полого сферического сегмента, на предложенном манипуляторе, она должна быть предварительно закреплена на оправке, дополняющей недостающую часть полной сферы. Закрепление детали на такой оправке может быть выполнено различными способами, например винтами или путем создания разрежения внутри их общей полости.
Указанный выше технический результат достигается тем, что манипулятор, содержащий основание, два привода, каретку и схват, выполнен из двух шарнирно закрепленных звеньев, при этом первое звено выполнено в виде разъемного основания, снабжено внутренним сферическим ложементом и круговой направляющей, а второе звено выполнено в виде размещенной в той же круговой направляющей каретки, на которой смонтированы приводы, представляющие собой привод поворота и привод качания, и схват, связанный с приводом поворота передачей и выполненный с возможностью смещения вдоль своей оси вращения, проходящей через центр сферического ложемента. Исполнение схвата может быть различным, например вакуумным, магнитным или механическим. Механический схват может быть выполнен, например, в виде трубки из эластичного или упругого материала.
Выполнение первого звена в виде разъемного основания, снабженного внутренним сферическим ложементом, позволило исключить возможность смещения центра вращения сферической детали при ее повороте и качании. При этом обеспечено вращение сферической детали более простыми средствами. Для этого манипулятор выполнен в виде двух шарнирно закрепленных звеньев, обеспечивающих возможность смещения второго звена относительно первого. При этом второе звено выполнено в виде каретки, размещенной в круговой направляющей, которой снабжено первое звено. Выполнение круговой направляющей, у которой центр ее радиуса совпадает с центром сферического ложемента, позволило осуществлять покачивание каретки вокруг горизонтальной оси. Для смещения каретки на ней установлен привод качания. Выполнение схвата с возможностью смещения вдоль своей оси вращения, проходящей через центр сферической полости неподвижного основания, позволило обеспечить надежный захват сферической детали и принудительное покачивание ее вокруг горизонтальной оси. Установка привода поворота на каретке и выполнение передачи, связывающей его с схватом, обеспечило возможность принудительного поворота сферической детали вокруг оси вращения схвата. Выполнение схвата вакуумным позволяет осуществить захват деталей, изготовленных из магнитных и немагнитных материалов. Выполнение схвата магнитным позволяет осуществить захват деталей, изготовленных только из магнитных материалов. Выполнение схвата механическим позволяет осуществить захват деталей из любого материала. Выполнение в механическом схвате удерживающего элемента в виде трубки из эластичного или упругого материалов позволяет осуществить захват сферической детали, например, за его выступающий цилиндрический или конический элемент, если таковой имеется.
На фиг. 1 показан манипулятор, общий вид; на фиг.2 - вид А (вид слева); на фиг.3 - разрез Б-Б; на фиг.4 - вид В (вид справа); на фиг.5 - разрез Г-Г; на фиг.6 - вид Д (вид сверху); на фиг.7 - магнитный схват (вариант исполнения); на фиг.8 - механический схват (вариант исполнения).
Манипулятор (см. фиг.1, 2, 3, 4, 5 и 6) содержит два шарнирно соединенных звена. Первое звено представляет собой основание манипулятора, выполненное из корпуса 1 и колпака 2. Основание выполнено разъемным и снабжено внутренним сферическим ложементом, представляющим собой замкнутую сферическую полость. Колпак 2 снабжен круговой направляющей 3 (в дальнейшем направляющая). Направляющая 3 состоит из двух полуколец, которые жестко соединены с колпаком 2. Второе звено выполнено в виде размещенной в направляющей 3 каретки 4. Между направляющей 3 и кареткой 4 установлены в сепараторе 5 шарики 6 (тела качения).
Направляющая 3 может быть выполнена и в другом варианте, например в виде направляющей с трением скольжения.
С колпаком 2 и кареткой 4 связаны зубчатыми передачами привод качания 7 и привод поворота 8 (в дальнейшем приводы). Привод 7 закреплен на кaретке 4, а его приводная шестерня входит в зацепление с зубчатым колесом 9 (зубчатым сегментом), выполненным заодно с одним из полуколец направляющей 3.
Закрепление привода 7 может быть выполнено и в другом варианте, например, он может быть закреплен на колпаке 2, а его приводная шестерня может находиться в зацеплении с зубчатым сегментом, жестко соединенным с кареткой 4 (не показано).
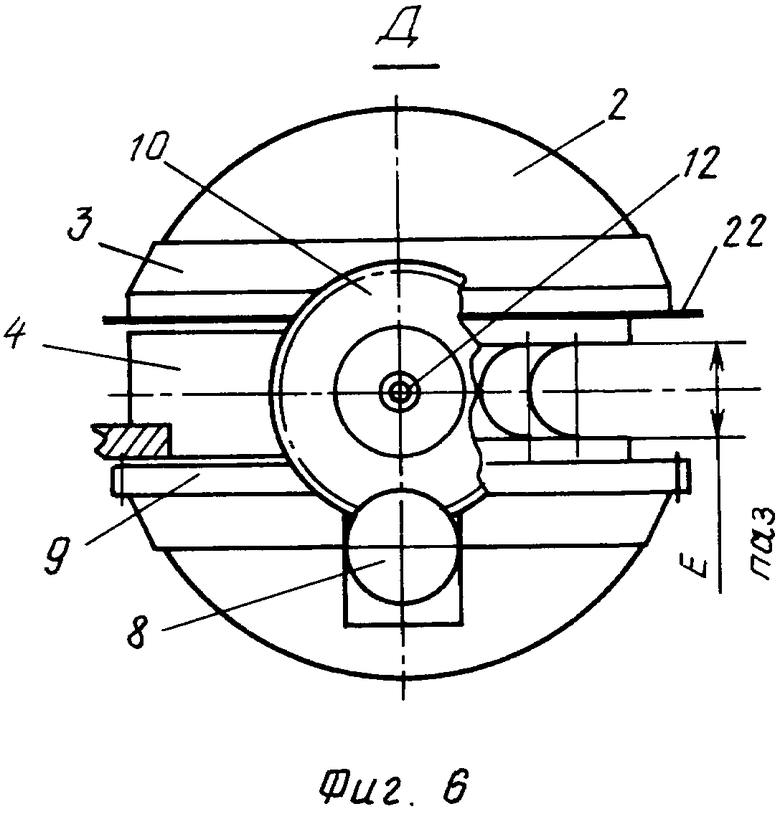
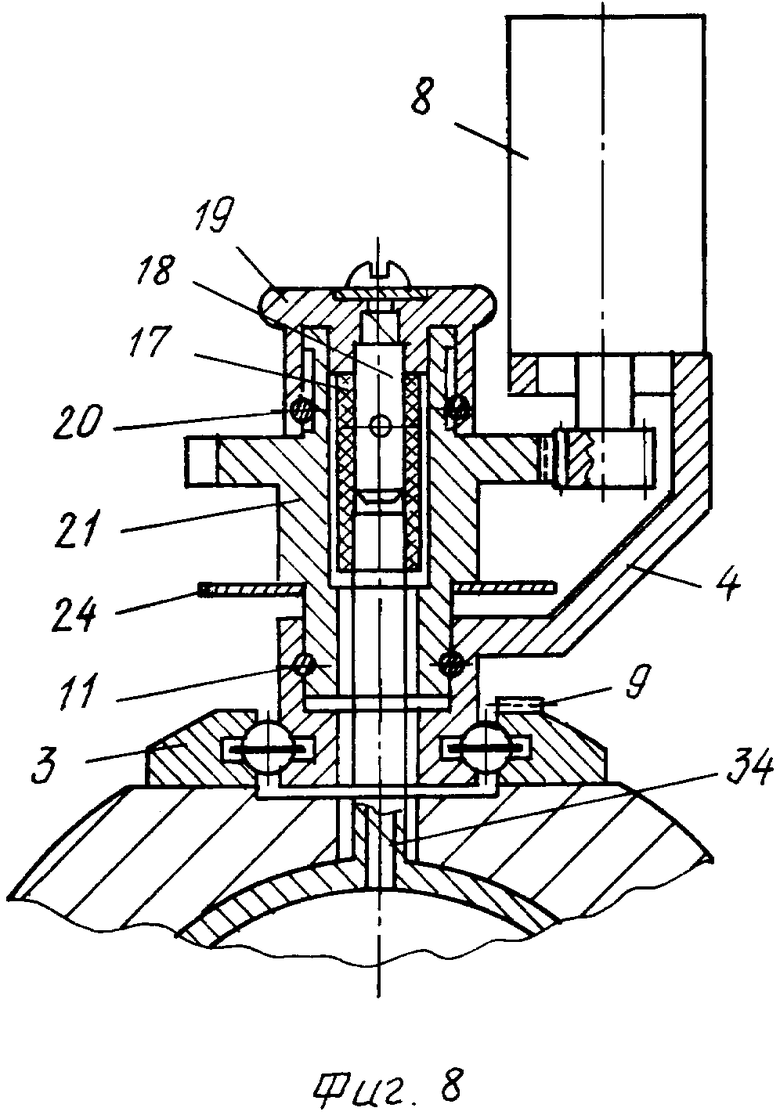
Привод 8, закрепленный на каретке 4, связан приводной шестерней с зубчатым колесом 10. Зубчатое колесо 10 установлено в отверстии, выполненном в каретке 4. В зубчатом колесе 10 выполнена кольцевая канавка, а в каретке 4 закреплен штифт 11 (один или два), сопряженный с кольцевой канавкой. Штифт 11 позволяет зубчатому колесу 10 вращаться, но при этом он удерживает его от осевого смещения (см. фиг.8).
Связи приводов 7 и 8 в виде зубчатых передач не являются обязательными и могут быть другими. Приводы 7 и 8 могут быть связаны с колпаком 2 и кареткой 4, например, с помощью гибкой связи с жесткими звеньями или фрикционной передачей.
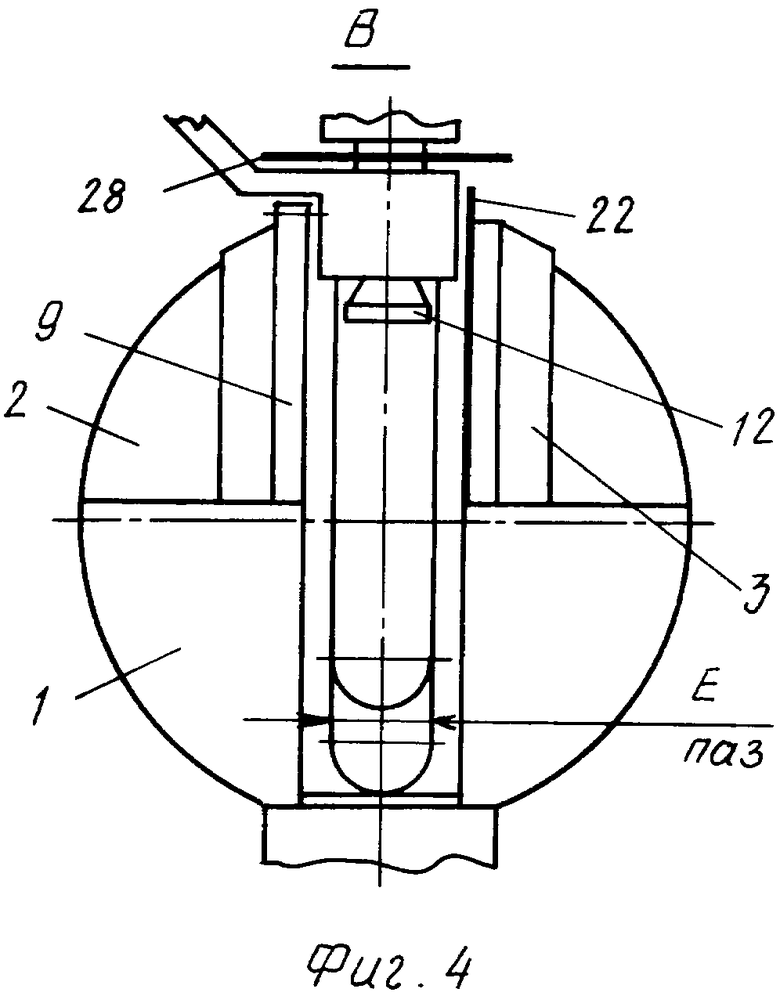
Каретка 4 снабжена схватом 12 (см. фиг.1). Схват 12 смонтирован в зубчатом колесе 10 и закреплен штифтом 13 (одним или двумя) от поворота относительно последнего. Штифт 13 закреплен в зубчатом колесе 10. В схвате 12 выполнена лыска, сопряженная со штифтом 13. Лыска позволяет схвату 12 смещаться вдоль оси вращения на требуемое расстояние. Максимальный угол качания α каретки 4 совместно с схватом 12 задан пазом Е, выполненным в корпусе 1 и колпаке 2 (см. фиг.1, 4 и 6).
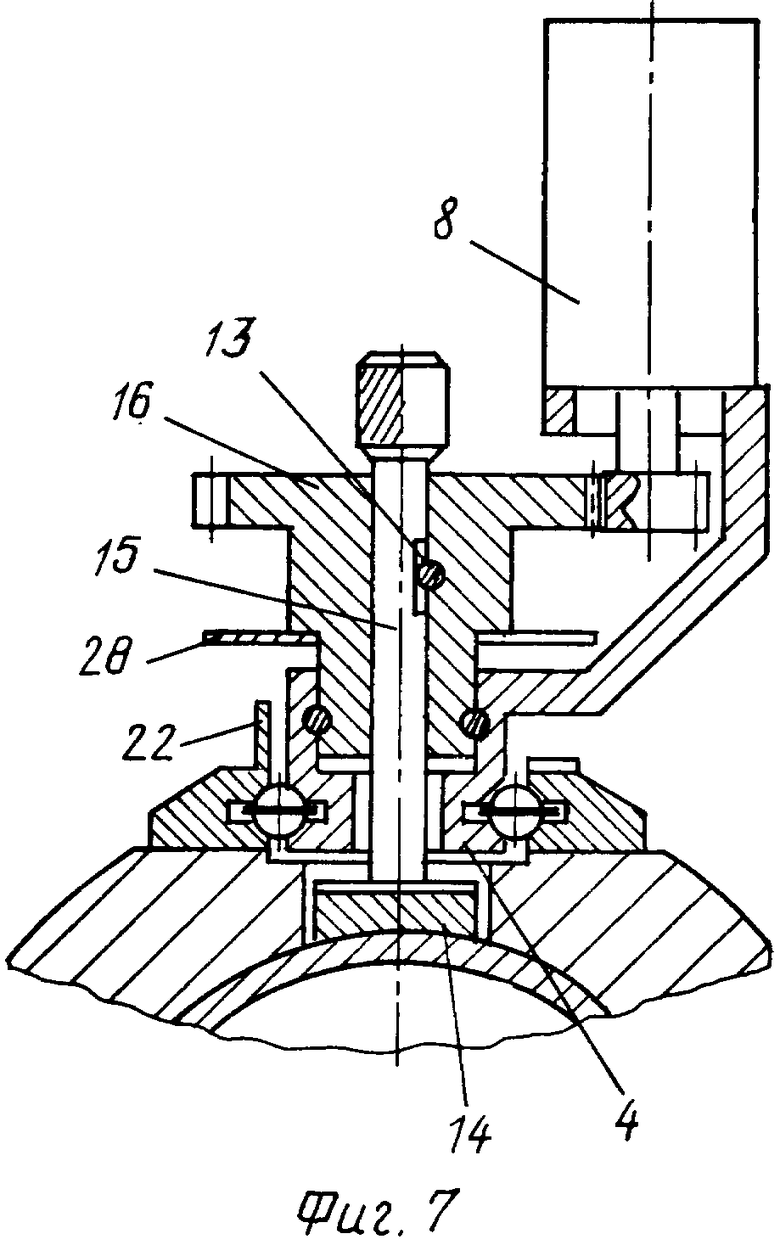
Схват может иметь различные варианты исполнения. Так, схват 12 (см. фиг. 1) выполнен вакуумным. Или, например, схват может быть выполнен магнитным (см. фиг.7). В этом случае постоянный магнит 14 закреплен на стержне с ручкой 15. Стержень с ручкой 15, смонтированный в зубчатом колесе 16, закреплен штифтом 13. В свою очередь штифт 13 закреплен в зубчатом колесе 16. В стержне с ручкой 15 выполнена лыска, сопряженная со штифтом 13. Лыска позволяет стержню с ручкой 15 смещаться вдоль оси вращения на требуемое расстояние. В магнитном схвате может использоваться и электромагнит. Кроме того, схват (см. фиг.8) может быть выполнен с механическим удерживающим элементом, например, выполненным в виде трубки 17 из эластичного или упругого материала. В этом случае трубка 17 жестко закреплена на стержне 18. В свою очередь стержень 18 жестко закреплен на рукоятке 19. В рукоятке 19 установлен штифт 20 (один или два штифта), который сопряжен с лыской, выполненной на зубчатом колесе 21. Лыски фиксируют трубку 17 от поворота относительно зубчатого колеса 21 и позволяют ей смещаться на требуемое расстояние относительно оси вращения. В приведенных вариантах исполнений схватов зубчатые колеса 16 и 21 выполняют ту же функцию, что и зубчатое колесо 10.
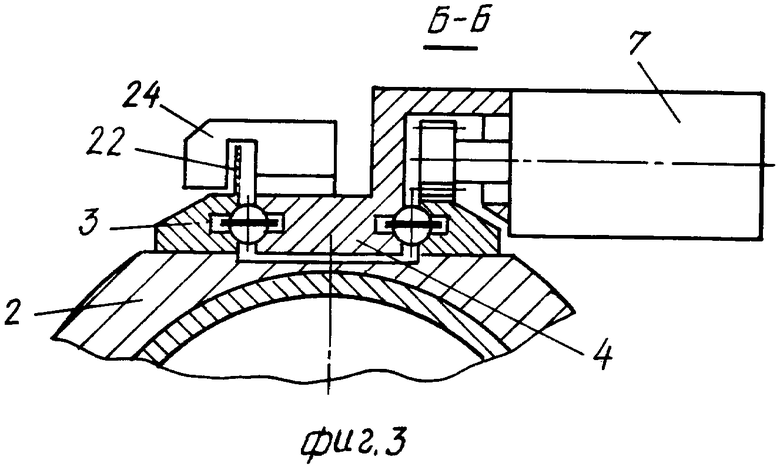
Приводы 7 и 8 снабжены измерителями перемещений. Измеритель перемещения привода 7 состоит из неполного диска 22 с перфорацией - пазами 23 (см. фиг. 1) и сопряженного с ним фотоэлектрического датчика 24 (см. фиг.3). Неполный диск 22 выполнен совместно с одним из полуколец направляющей 3. Количество и угловое расположение пазов 23 может быть различным. Фотоэлектрический датчик 24 (см. фиг.5) состоит из корпуса 25, светодиода 26 и фотодиода 27. Измеритель перемещения привода 8 состоит из диска 28 с перфорацией - пазами, аналогичными пазам 23, и сопряженного с ним фотоэлектрического датчика 29, по конструкции аналогичного датчику 24.
Измерители перемещения могут быть различных вариантов исполнения. Измеритель перемещения может быть, например, выполнен в виде диска (или неполного диска) со штрихами, указывающими угол поворота, и сопряженного с ним индекса, то есть детали с одним штрихом (не показано). При установке диска и индекса на различные детали и повороте их относительно друг друга индекс будет указывать угол поворота (визуальный контроль). Измерителем перемещения может быть также, например, сельсин-датчик с сельсин-приемником и так далее.
На манипулятор может устанавливаться, например, ультразвуковой датчик 30. При этом в основании 1 выполняется полость 31 и канал 32 для подвода контактной смазки. Манипулятор может также применяться совместно с лазерной установкой. При этом в основании 1 или в какой-либо другой его части может быть выполнен сквозной канал для подвода лазерного луча к детали. Могут быть и другие варианты применения манипулятора.
Манипулятор работает следующим образом.
Для установки детали 33 (или 34) в ложементе колпак 2 снимается с корпуса 1. После размещения сферической детали колпак 2 возвращается на свое место. Для принудительного смещения сферической детали последняя удерживается схватом 12 (или 14, или 17). Если используется схват 12, то в его полости создают разрежение и за счет разности давлений в этой полости и в атмосфере он поджимается к сферической детали 33 и удерживает ее. Если используется схват 14, то он за счет способности притягивать поджимается к сферической детали 33 и удерживает ее, при условии изготовления этой детали из материала, способного притягиваться магнитом. Если используется схват 17, то деталь удерживается трубкой 17. Так, при нажатии на рукоятку 19 смещаем трубку 17 в направлении цилиндрического элемента сферической детали 34. Свободный конец трубки 17 натягивается на этот элемент и за счет эластичности (или упругости) материала удерживает сферическую деталь 34.
Принудительное качание сферической детали 33 (или 34) вокруг горизонтальной оси осуществляется от привода 7. При вращении приводной шестерни привода 7 его приводная шестерня обкатывается по неподвижному зубчатому колесу 9, а каретка 4 смещается следом в круговой направляющей 3, схват 12 (или 14, или 17) смещается вместе с кареткой 4, поворачивая при этом вокруг горизонтальной оси удерживаемую ею сферическую деталь 33 (или 34). Принудительное вращение сферической детали 33 (или 34) вокруг множества осей, расположенных в диапазоне максимального поворота α схвата 12 (или 14, или 17) при его качании, осуществляется от привода 8. При вращении приводной шестерни привода 8 поворачивается зубчатое колесо 10 (или 16, или 21), а вместе с ним схват 12 (или 14, или 17), удерживающий деталь 33 (или 34).
Необходимая траектория смещения сферической детали 33 (или 34) зависит от вида технологической операции (измерения, сварки, резки, поверхностной закалки и т.п.), которую необходимо осуществить на данном манипуляторе. Эта траектория задается соответствующим алгоритмом, введенным в программу управления приводами 7 и 8. Рассмотрим пример использования манипулятора при измерении ультразвуковым датчиком 30 толщины стенок детали, выполненной в виде полой сферы, в различных точках ее наружной поверхности. При перемещении каретки 4 на требуемый угол вокруг горизонтальной оси деталь 33 (или 34), удерживаемая схватом 12 (или 14, или 17), совершает то же перемещение. После того как каретка 4 переместится, измеритель перемещения 25, например, выполненный в виде фотоэлектрического датчика, выдает электрический сигнал на выключение привода 7. Точка наружной поверхности, в которой необходимо провести измерения, совмещена с ультразвуковым датчиком 30. После проведения измерения толщины стенки полой сферы в первой точке наружной поверхности детали она принудительно поворачивается на требуемый угол при вращении схвата 12 (или 14, или 17). После останова вращения детали вторая точка ее наружной поверхности совмещена с ультразвуковым датчиком 30. После проведения измерения деталь вновь принудительно поворачивается на следующий требуемый угол. После совершения схватом 12 (или 14, или 17) совместно с деталью 33 (или 34) полного оборота вокруг оси вращения эта деталь принудительно перемещается вместе с кареткой 4 на следующий требуемый угол вокруг горизонтальной оси. После чего проводятся измерения в точках наружной поверхности этой детали, которые совмещаются с ультразвуковым датчиком 30 вращением схвата 12 (или 14, или 17). И так во всех точках, лежащих в других секущих плоскостях, число которых ограничено максимальным углом качания α и угловыми шагами вокруг обеих осей вращения. При необходимости осуществления сварки, резки или поверхностной закалки приводы 7 и 8 могут работать одновременно, а также с периодическими поочередными включениями-выключениями по электрическим сигналам измерителей перемещения 24 и 29 для осуществления вращения сферической детали по сложной траектории. При использовании в качестве приводов 7 и 8 электродвигателей постоянного тока или шаговых электродвигателей можно осуществлять перемещение с различными скоростями, изменяющимися во времени перемещения.
Предложенный манипулятор имеет простую конструкцию, обеспечивает для детали два вращательных движения, в результате которых большая часть точек ее сферической поверхности может быть подведена в заданную координату к инструменту для осуществления технологической операции (измерение, сварка, резка, поверхностная закалка и т.п.). Технический эффект очевиден, а экономический эффект на данном этапе подсчитать не представляется возможным.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ПЛАЗМЕННОГО НАПЫЛЕНИЯ | 2000 |
|
RU2190035C2 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ АРМИРОВАННЫХ ПЛАСТИН | 1998 |
|
RU2152293C1 |
| СПОСОБ МАНИПУЛИРОВАНИЯ СФЕРИЧЕСКИМ ОБЪЕКТОМ | 1996 |
|
RU2105663C1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ РАДИОЭЛЕМЕНТОВ ИЗ СТОПЫ | 1998 |
|
RU2141748C1 |
| ПРИВОД ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149097C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕЙСТВИТЕЛЬНЫХ РАЗМЕРОВ ПАРАМЕТРОВ НАРУЖНЫХ ПОВЕРХНОСТЕЙ И РАДИУСОВ СФЕРИЧЕСКИХ ИЗДЕЛИЙ | 1999 |
|
RU2159920C1 |
| ТУРНИКЕТ | 1996 |
|
RU2119034C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ СФЕРИЧЕСКИМ ОБЪЕКТОМ | 1996 |
|
RU2110397C1 |
| НЕСУЩАЯ МЕХАНИЧЕСКАЯ СИСТЕМА | 2005 |
|
RU2301142C2 |


Изобретение относится к робототехнике и может быть использовано в конструкции манипуляторов, где требуется вращение деталей по сложным сферическим траекториям. Манипулятор выполнен из двух шарнирно закрепленных звеньев. Первое звено выполнено в виде разъемного основания, снабжено внутренним сферическим ложементом и круговой направляющей. А второе звено выполнено в виде размещенной в той же круговой направляющей каретки, на которой смонтированы приводы, представляющие собой привод поворота и привод качания, и схват. Схват связан с приводом поворота передачей и выполнен с возможностью смещения вдоль своей оси вращения, проходящей через центр сферического ложемента. Схват может быть выполнен вакуумным, магнитным или механическим, при этом механический схват может быть выполнен в виде трубки из эластичного или упругого материала. Изобретение позволит обеспечить возможность подвода различных точек на наружной поверхности детали к технологическому инструменту. 4 з.п. ф-лы, 8 ил.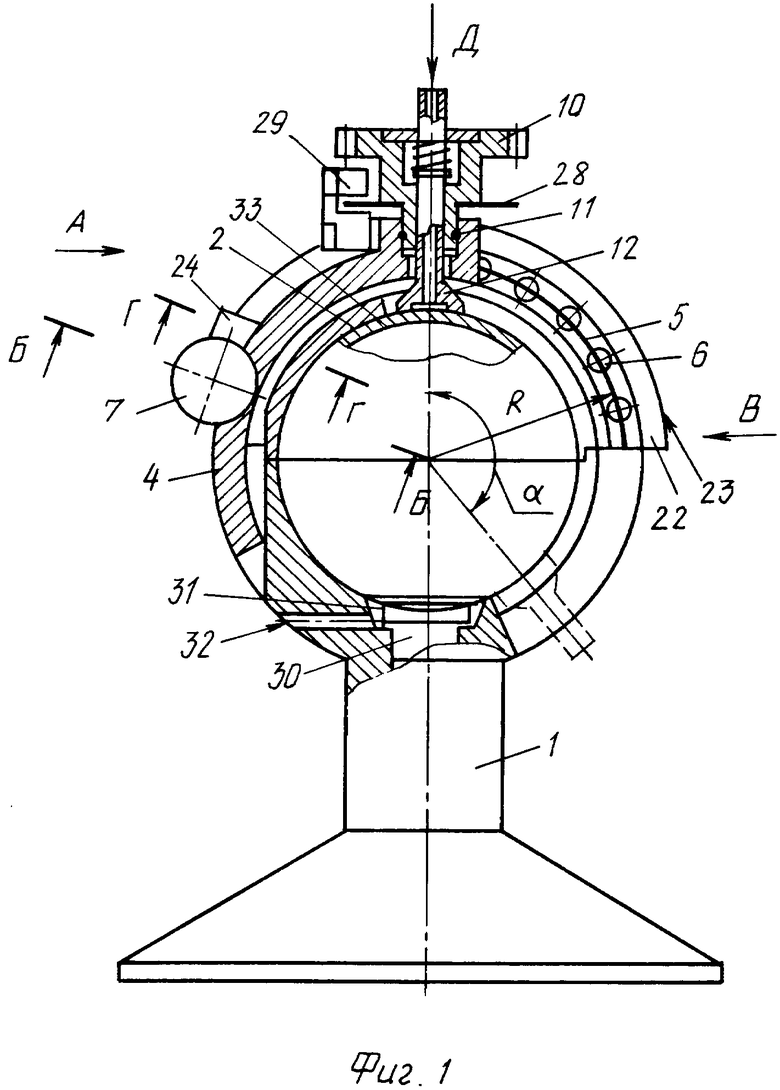
| Микроманипулятор | 1980 |
|
SU933449A1 |
| Стержневой манипулятор | 1985 |
|
SU1323361A1 |
| Уравновешенная манипуляционная система | 1990 |
|
SU1821354A1 |
| Устройство для определения количества циклов замораживания и оттаивания в строительных конструкциях | 1976 |
|
SU567121A1 |

