Изобретение относится к области приборостроения, а именно к электромеханическим инерционным датчикам порогового действия.
Известны инерционные переключатели /1,2/, содержащие сферическое инерционное тело, удерживаемое постоянным магнитом, цилиндрический направляющий канал для рабочего хода инерционного тела и контактную пару, размещенную в конце рабочего хода инерционного тела с возможностью замыкания контактов через материал инерционного тела.
Устройства [1,2] содержат признаки, совпадающие с изобретением: размещенное в корпусе сферическое инерционное тело, удерживаемое постоянным магнитом, и разомкнутую контактную пару.
Общий недостаток аналогов [1,2] заключается в том, что они могут реагировать только на составляющую ускорения, направленную вдоль оси цилиндрического направляющего канала, а при действии вдоль этой оси вибрационных нагрузок за счет колебаний инерционного тела может происходить размыкание контактов.
Прототипом является датчик ускорения [3] , содержащий размещенные в корпусе постоянный магнит, разомкнутую контактную пару с подвижным контактом в виде упругой консоли, закрепленной со стороны размещения магнита, сферическое инерционное тело, удерживаемое в исходном положении силой магнитного притяжения и установленное с возможностью перемещения по поверхности консоли как вдоль ее длины, так и в направлении ее поперечного прогиба. Замыкание контактной пары осуществляется за счет силы упругости контактирующей консоли при условии выхода инерционного тела в конце рабочего хода за подвижный край консоли в свободное пространство.
Устройство [3] содержит признаки, совпадающие с изобретением: размещенные в корпусе постоянный магнит, разомкнутую контактную пару с подвижным контактом в виде упругой консоли, закрепленной со стороны размещения магнита, сферическое инерционное тело, удерживаемое в исходном положении силой магнитного притяжения и установленное с возможностью перемещения как вдоль длины консоли, так и в направлении ее поперечного прогиба.
Функциональный недостаток прототипа [3] заключается в однократности действия, т. к. после одного срабатывания инерционное тело не возвращается в исходное положение при исчезновении инерционных сил. Возвращению препятствует упор в свободный край консоли.
Второй недостаток прототипа заключается в том, что после срабатывания инерционное тело, находясь в свободном пространстве, при действии вибрации имеет возможность ударять по краю упругой консоли, что может вызвать размыкание контактной пары.
Задача, на решение которой направлено заявляемое техническое решение, заключается в устранении вышеуказанных недостатков прототипа.
Технический результат, получаемый при осуществлении изобретения, состоит в обеспечении многократного срабатывания переключателя, находящегося на подвижном объекте, при одновременном повышении качества коммутации электрической цепи.
При действии двух компонент сил инерции заданного диапазона, а именно за счет приращения линейной скорости объекта и вращения его относительно продольной оси, должно обеспечиваться замкнутое состояние контактной пары. А в случае исчезновения силы инерции, направленной вдоль продольной оси объекта, контакты переключателя должны переходить в разомкнутое состояние. При повторном появлении силы инерции, направленной вдоль оси объекта, контактная пара должна вновь переходить в замкнутое состояние и т. д.
При этом имеется в виду, что частота вращения объекта относительно продольной оси находится в заданных пределах.
Для достижения вышеуказанного технического результата в инерционном переключателе, содержащем размещенные в корпусе постоянный магнит, разомкнутую контактную пару с подвижным контактом в виде упругой консоли, закрепленной со стороны размещения магнита, сферическое инерционное тело, удерживаемое в исходном положении силой магнитного притяжения и установленное с возможностью перемещения как вдоль консоли, так и в направлении ее поперечного прогиба, новым является то, что на пути рабочего хода инерционного тела закреплена упругая демпфирующая пластина под углом ϕ0 к поверхности консоли с возможностью увеличения этого угла в процессе рабочего хода инерционного тела, причем угол ϕ0 выполнен в пределах
90°>ϕ0≥2arctg(R/lп), (1)
а соотношение упругих характеристик прогибов консоли и демпфирующей пластины выбрано из условия:
где ϕ0 - начальный угол между консолью и демпфирующей пластиной;
R - радиус сферического инерционного тела;
lп - рабочая длина демпфирующей пластины;
FKmin - заданная минимальная величина поперечной силы, обеспечивающая прогиб консоли для замыкания контактной пары;
ny - величина составляющей ускорения направленной вдоль консоли, находящаяся в заданном диапазоне;
m - величина массы инерционного тела;
Δϕ -- увеличение угла наклона демпфирующей пластины под действием силы инерции Fy-ny, находящейся в заданном диапазоне.
При отсутствии осевой составляющей ускорения nx (в "паузе"), т. е. при отсутствии приращения линейной скорости объекта, на контактирующую консоль действует поперечная сила
Fx(Y) = 0,5ny•m•sin(2ϕ0+2Δϕ). (3)
Увеличение угла Δϕ в процессе рабочего хода инерционного тела с увеличением ny приводит к ограничению роста величины Fx(Y), поскольку функция sin(2ϕ0+2Δϕ) при этом уменьшается, т.к. угол ϕ0+Δϕ превышает 45o. Поэтому, как будет показано ниже при рассмотрении схемы действующих сил, величина Fx(Y) во всем заданном диапазоне ny остается меньше минимальной величины силы Fkmin замыкания контактной пары. Вследствие этого в "паузе" контактная пара находится в разомкнутом состоянии. При появлении после "паузы" ускорения nx заданной величины, увеличивается сила, действующая на контактирующую консоль:
F2 = nx•m+Fx(Y)
В этих условиях F2 > Fk, и контактная пара переходит в замкнутое состояние.
В заданном диапазоне величин nx, ny получаемая суммарная поперечная сила F2 существенно превышает величину Fk, создавая дополнительное контактное давление после замыкания контактной пары, превышающее возможный уровень вибрационных нагрузок, повышая качество коммутации электрической цепи.
Так, например, при nx = ny и ϕ0+Δϕ = 45° величина F2 становится больше величины Fx=nx•m в 1,5 раза.
Дополнительный эффект повышения качества коммутации электрических цепей получается за счет выполнения демпфирующей пластины с отогнутым язычком, опирающимся свободным концом на внутреннюю поверхность корпуса с возможностью скольжения по ней при изменении угла наклона демпфирующей пластины, выражающийся в гашении вибрационных колебаний за счет трения язычка по внутренней поверхности корпуса.
На фиг. 1 изображена конструкция инерционного переключателя;
на фиг. 2 показана схема сил, действующих на контактную консоль и демпфирующую пластину.
На приведенных фигурах обозначено:
1 - корпус,
2 - инерционное тело (шарик),
3 - постоянный магнит,
4 - неподвижный контакт,
5 - упругая контактирующая консоль,
6 - упругая демпфирующая пластина,
7 - язычок демпфирующей пластины,
8 - свободный конец язычка,
R - радиус инерционного тела,
lп - рабочая длина демпфирующей пластины,
ϕ0 - начальный угол между консолью и демпфирующей пластиной,
Δϕ - изменение угла наклона демпфирующей пластины при нагружении,
lk - расстояние от точки соприкосновения шарика с демпфирующей пластиной до места ее крепления,
δ - величина межконтактного зазора,
F2 - сила, действующая на контактирующую консоль,
Fy - величина силы инерции шарика, получаемая от вращения объекта вокруг продольной оси,
Fx(Y)- составляющая силы, направленная по нормали к контактирующей консоли,
Fg - величина нормальной силы, действующей на демпфирующую пластину,
x - продольная ось объекта,
y - поперечная ось объекта, параллельная контактирующей консоли.
Инерционный переключатель, изображенный на фиг. 1, состоит из корпуса 1, в котором размещены постоянный магнит 3 и контактная пара с неподвижным контактом 4 и упругой контактирующей консолью 5, закрепленной в корпусе 1 со стороны магнита 3. Инерционное тело 2 удерживается силой притяжения магнита 3. На пути рабочего хода инерционного тела 2 закреплена демпфирующая пластина 6 с отогнутым язычком 7, свободный конец 8 которого опирается на внутреннюю поверхность корпуса 1.
Демпфирующая пластина 6 установлена под углом относительно контактирующей консоли 5 с возможностью увеличения этого угла в процессе рабочего хода инерционного тела 2. Величина угла ϕ0 выбрана из условия (1), а соотношение упругих характеристик прогибов консоли и демпфирующей пластины выбрано из условия (2).
Переключатель, установленный в объекте, работает следующим образом. На начальном этапе движения объекта линейная скорость по оси X увеличивается от нуля до некоторого значения, одновременно осуществляется закрутка объекта вокруг оси X. Под действием двух компонент сил инерции Fx = nx•m и Fy=ny•m инерционное тело 2, преодолев силу магнитного притяжения, отрывается от опорной поверхности и совершает рабочий ход. В процессе рабочего хода инерционное тело 2 перемещается как вдоль длины контактирующей консоли 5, так и в направлении ее поперечного прогиба, оказывая силовое воздействие на демпфирующую пластину 6. При этом суммарная сила F2=Fx+Fx(Y)-nx•m+ 0,5ny•m•sin (2ϕ0+2Δϕ). (см. фиг. 2) существенно превышает силу Fk замыкания контактов, поэтому контактная пара переходит в замкнутое состояние (на фиг.1 это состояние изображено штрихпунктирными линиями). При отключении средства разгона объекта осевая составляющая ускорения nx=0, частота вращения объекта сохраняется, т.е. F2=Fx(Y), и на контактирующую консоль действует, как уже указывалось выше, сила Fx(Y)=0,5ny•m•sin (2ϕ0+2Δϕ).
Контактная пара при таком силовом воздействии переходит в разомкнутое состояние. При повторном включении средства разгона сила воздействия на контактирующую консоль возрастает на величину nx•m и становится больше величины Fkmax, контактная пара при этом переходит в замкнутое состояние.
Величина силы Fk при заданном значении межконтактного зазора δ для консольно закрепленной плоской пружины (см. фиг.2) может быть определена из соотношений, имеющихся в справочной литературе (см. например /4/, стр. 218).
Поскольку демпфирующая пластина 6 с отогнутым язычком 7, касающимся стенки корпуса 1, при нагружении ее силой Fg (см.фиг.2) представляет собой статическую неопределимую систему, а величина lk изменяется в зависимости от изменения угла Δϕ, расчетные значения прогиба пластины и угла Δϕ можно получить численным методом на ЭВМ или экспериментально. Варьируя при этом величинами толщины пластины, ее ширины и модуля упругости материала, можно получить параметры упругого прогиба и угла Δϕ пластины 8, удовлетворяющие условию (2) в заданном диапазоне от nymin до nymax
Источники информации
1. Авторское свидетельство СССР N 1820335, G 01 P 15/04, 07.06.93.
2. Патент США N 5193392, H 01 H 35/14, 06.10.92.
3. Патент ФРГ N DE 4106103 H 01 H 35/14, 12.03.92.
4. Прочность, устойчивость, колебания. Справочник Т.1.- М.:Машиностроение, 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 1996 |
|
RU2130665C1 |
| ДАТЧИК ПРЕДЕЛЬНЫХ УСКОРЕНИЙ | 2001 |
|
RU2216026C2 |
| УЛЬТРАЗВУКОВОЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИЕМНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2180441C2 |
| УСТРОЙСТВО ДЛЯ МНОГОКАНАЛЬНОГО ИЗМЕРЕНИЯ ВРЕМЕННЫХ ПАРАМЕТРОВ | 1999 |
|
RU2180450C2 |
| УСТРОЙСТВО ДЛЯ УДАРНЫХ ИСПЫТАНИЙ МАТЕРИАЛОВ С БОЛЬШИМ ВНУТРЕННИМ ТРЕНИЕМ ПРИ ЗНАКОПЕРЕМЕННЫХ СКОРОСТЯХ ДЕФОРМИРОВАНИЯ | 2000 |
|
RU2187790C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ АКУСТИЧЕСКОЙ ЭМИССИИ | 1996 |
|
RU2110792C1 |
| СПОСОБ МАНИПУЛИРОВАНИЯ СФЕРИЧЕСКИМ ОБЪЕКТОМ | 1996 |
|
RU2105663C1 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ И ВЫДАЧИ ПРЕДМЕТОВ | 1998 |
|
RU2141132C1 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2001 |
|
RU2221302C2 |
| ИНДУКТИВНЫЙ ДАТЧИК СИЛЫ | 1998 |
|
RU2148804C1 |

Изобретение относится к электромеханическим инерционным датчикам порогового действия. Инерционный переключатель содержит размещенные в корпусе постоянный магнит, разомкнутую контактную пару с подвижным контактом в виде упругой консоли, закрепленной со стороны размещения магнита, сферическое инерционное тело, удерживаемое в исходном положении силой магнитного притяжения и установленное с возможностью перемещения как вдоль длины консоли, так и в направлении ее поперечного прогиба. На пути рабочего хода инерционного тела закреплена упругая демпфирующая пластина под углом ϕ0 к поверхности консоли с возможностью увеличения этого угла в процессе рабочего хода инерционного тела. Угол ϕ0 выполнен в пределах 90o>ϕ0≥2arc tg (R/lп), а соотношение упругих характеристик прогибов консоли и демпфирующей пластины выбрано из условия: Fkmin > 0,5nу•m•sin(2ϕ0+2Δϕ), где ϕ0 - начальный угол между консолью и пластиной, R - радиус инерционного тела, lп - длина пластины, Fкmin - минимальная сила замыкания контактов, nу - ускорение вдоль консоли, находящееся в заданном диапазоне, m - масса инерционного тела, Δϕ - увеличение угла наклона под действием силы инерции. Технический результат: обеспечение многократного срабатывания переключателя, находящегося на подвижном объекте, при одновременном повышении качества коммутации электрической цени. 1 з.п. ф-лы, 2 ил.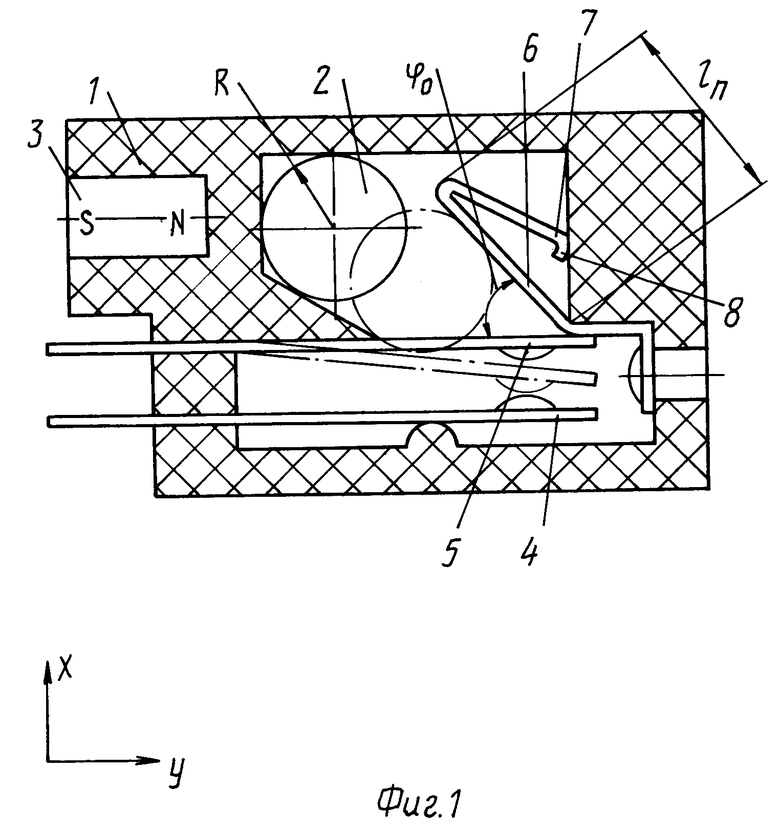
90o > ϕ0 ≥ 2 arctg (R / lп),
а соотношение упругих характеристик прогибов консоли и демпфирующей пластины выбрано из условия
Fкmin>0,5nу•m•sin(2ϕ0+2Δϕ),
где ϕ0 - начальный угол между консолью и демпфирующей пластиной;
R - радиус сферического инерционного тела;
lп - рабочая длина демпфирующей пластины;
Fкmin - заданная минимальная величина поперечной силы, обеспечивающая прогиб консоли для замыкания контактной пары;
nу - величина составляющей ускорения, направленной вдоль консоли, находящаяся в заданном диапазоне;
m - масса инерционного тела;
Δϕ - увеличение угла наклона демпфирующей пластины под действием силы инерции в заданном диапазоне.
| DE 4106103 A1, 12.03.92 | |||
| Датчик пороговых ускорений | 1990 |
|
SU1820335A1 |
| DE 4035257 A1, 16.05.91 | |||
| DE 4115329 A1, 19.12.91 | |||
| DE 4124514 A1, 28.01.93 | |||
| US 5193392 A, 16.03.93 | |||
| US 5192839 A, 09.03.93 | |||
| Способ обработки червячных колес | 1958 |
|
SU119064A1 |
| Полировальный станок для обработки наружных поверхностей полых изделий | 1959 |
|
SU125493A1 |
| КОПИРОВАЛЬНЫЙ ПРИБОР ДЛЯ ПЕЧАТИ ЦВЕТНЫХ | 0 |
|
SU167429A1 |
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| Прочность, устойчивость, колебания | |||
| Справочник | |||
| Т | |||
| I | |||
| - М.: Машиностроение, 1968, с | |||
| Прибор для измерения силы звука | 1920 |
|
SU218A1 |
