Изобретение относится к транспортному машиностроению и касается выполнения трансмиссии транспортных средств.
Известна трансмиссия транспортного средства, содержащая входной вал, параллельные ему промежуточный вал с шестернями, находящимися в постоянном зацеплении с шестернями входного вала, дополнительный вал с шестернями постоянного зацепления, включаемыми фрикционными муфтами, и выходной вал с подвижными в аксиальном направлении шестернями, причем входной вал соединен с ведущими звеньями трехзвенных планетарных механизмов, ведомые звенья которых при помощи шестерен постоянного зацепления соединены с промежуточным валом, а тормозные элементы дифференциальных механизмов соединены с шестернями постоянного зацепления, установленными на дополнительном валу и включаемыми фрикционными муфтами (см. SU, авторское свидетельство N 288559, кл. B 60 K 17/06, 1971).
Недостатком известной трансмиссии является сложность конструкции, обусловленная вальным построением механизма трансформации момента. Такое построение, основанное на разнесении шестерен по валам и формировании кинематических цепей, отдельных для каждой передачи, приводит к созданию развитых по массогабаритным показателям механизмов, что ограничивает возможность использования созданной для определенного типа транспортного средства трансмиссии на транспортных средствах других типоразмеров. Кроме того, трансмиссия обеспечивает ступенчатое переключение передач и прерывистую передачу крутящего момента к ведущим колесам.
В то же время, по условиям движения транспортного средства необходимо сохранение непрерывной передачи крутящего момента ведущим колесам и обеспечение плавного изменения момента в зависимости от условий движения. Создание трансмиссии по такому принципу позволило бы исключить большую часть управляющих движений для оператора и упростить управление транспортным средством.
Такой принцип реализуется с использованием планетарных механизмов и регулируемых тормозных механизмов, комбинация которых позволяет получить небольшую по размерам и по массе трансмиссию с плавным изменением крутящего момента на выходе в зависимости от тормозного момента в тормозном механизме.
Известна трансмиссия транспортного средства, содержащая приводной входной вал, кинематически связанный с ведущим звеном дифференциального механизма, выходной вал, кинематически связанный с ведомым звеном дифференциального механизма, дополнительный вал, связанный с одним из звеньев дифференциального механизма и с тормозным механизмом, имеющим функцию плавного нарастания тормозного момента, а также механизм переключения направления движения транспортного средства с органом управления, механизм блокировки дифференциального механизма и устройство управления, включающее в себя исполнительные элементы механизма блокировки и тормозного механизма (см. SU, авторское свидетельство N 1255466, кл. B 60 K 17/10, 1986).
Данная трансмиссия позволяет за счет плавного включения тормозного механизма, связанного с третьим звеном одного из планетарных рядов, обеспечить плавное нарастание крутящего момента на выходном валу, что создает условия для получения плавного изменения крутящего момента на выходе трансмиссии. Однако использование планетарного дифференциального механизма в качестве вариатора не подкреплено устройством управления, которое оценивало бы изменение нагрузки и оборотов входного и выходного валов и обеспечивало бы автоматическое включение прямой передачи. Иначе говоря, имеющееся устройство управления не полностью отвечает всем возможностям вариатора.
Настоящее изобретение направлено на решение технической задачи по усовершенствованию трансмиссии с устройством управления и касается введения датчиков оборотов валов, по сигналам которых обеспечивается переключение режимов и включение прямой передачи, и введения связи органа управления переключением направления хода с механизмом блокировки. Достигаемый при этом технический результат заключается в улучшении эксплуатационных свойств трансмиссии и повышении ее эффективности.
Указанный технический результат достигается тем, что в трансмиссии транспортного средства, содержащей приводной входной вал, кинематически связанный с ведущим звеном дифференциального механизма, выходной вал, кинематически связанный с ведомым звеном дифференциального механизма, дополнительный вал, связанный с одним из звеньев дифференциального механизма и с тормозным механизмом, имеющим функцию плавного нарастания тормозного момента, а также механизм переключения направления движения транспортного средства с органом управления, механизм блокировки дифференциального механизма и устройство управления, включающее в себя исполнительные элементы механизма блокировки и тормозного механизма, механизм блокировки связан с дополнительным валом, а устройство управления дополнительно включает в себя датчики оборотов входного и выходного валов, связанные с блоком сравнения для выдачи управляющего воздействия при равенстве оборотов на включение исполнительного элемента механизма блокировки и выключение исполнительного элемента тормозного механизма, механизм пропорционального изменения усилия, связанный кинематически с дроссельной заслонкой и с исполнительным элементом тормозного механизма, элементы включения и выключения блока сравнения соответственно при положении органа управления в режиме переднего и заднего ходов транспортного средства, при этом выход датчика оборотов входного вала связан с исполнительным элементом тормозного механизма для включения тормозного механизма при оборотах вала выше заданных для режима холостого хода.
Кроме того, дифференциальный механизм представляет собой одно- или двухрядный планетарный механизм.
Кроме того, тормозной механизм выполнен в виде по крайней мере одной электромашины.
Кроме того, указанная электромашина представляет собой асинхронный электродвигатель с фазным ротором или с короткозамкнутым ротором, или является системой генератор - двигатель.
Кроме того, тормозной механизм представляет собой гидромуфту с изменяемым режимом наполнения жидкостью или по крайней мере одну гидромашину.
Кроме того, тормозной механизм представляет собой жидкостную муфту трения или шестеренчатый насос.
Кроме того, тормозной механизм представляет собой систему гидронасос - гидромотор.
Кроме того, трансмиссия дополнительно снабжена выключателем режима блокирования дифференциального механизма.
Указанные признаки являются существенными и взаимосвязаны между собой с образованием совокупности существенных признаков, достаточной для получения требуемого технического результата.
Так, прямая передача для транспортного средства соответствует равенству оборотов двигателя и выходного вала и представляет собой наиболее экономичный режим движения. Введение датчиков оборотов входного и выходного валов позволяет устройству получать информацию о достижении экономичного режима, а их связь с механизмом блокировки через схему сравнения позволяет своевременно выйти на этот режим, включив блокировку дифференциального механизма.
Связь датчика оборотов входного вала с исполнительным элементом тормозного механизма обеспечивает включение последнего лить по достижении устойчивых оборотов холостого хода или выше минимально заданного порога.
А элементы включения и выключения блока сравнения, связанные с органом управления передним и задним ходом, позволяют при переходе на режим заднего хода исключить блокировку дифференциального механизма.
Настоящее изобретение иллюстрируется конкретным примером, который, однако, не является единственно возможным, но наглядно демонстрирует возможность достижения указанной совокупностью признаков требуемого технического результата.
На фиг. 1 представлена блок-схема трансмиссии транспортного средства; на фиг. 2 - блок-схема устройства управления; на фиг. 3 - первый пример компоновки транспортного средства с предложенной трансмиссией; на фиг. 4 - второй пример компоновки транспортного средства с предложенной трансмиссией; на фиг. 5 - третий пример компоновки транспортного средства с предложенной трансмиссией; на фиг. 6 - четвертый пример компоновки транспортного средства с предложенной трансмиссией.
Трансмиссия транспортного средства (см. фиг. 1) содержит входной вал 1 и выходной вал 2, жестко соединенные соответственно с ведущим звеном и кинематически с ведомым звеном одно- или двухрядного планетарного дифференциального механизма 3, а также соединенный с ним дополнительный вал 4, на котором установлены механизм блокировки 5 с жестко связанным с ним тормозным механизмом 6. Дифференциальный механизм 3 связан с тормозным механизмом 6. На входном 1 и выходном 2 валах установлены датчики оборотов 7 и 8. Тормозной механизм 6 управляется от устройства управления 9, регулирующий элемент которого связан с дроссельной заслонкой 10. Входной вал 1 связан с механизмом переключения 11 направления движения, которое соединено с органом управления 12 и с устройством управления 9.
В качестве тормозного механизма 6 может быть использовано электротормозное устройство в виде электродвигателя постоянного тока, асинхронного электродвигателя с короткозамкнутым ротором или с фазным ротором, системы "генератор - двигатель постоянного тока в режиме противовключения" или системы "генератор - двигатель двойного питания". Тормозной механизм может представлять собой гидротормозное устройство, например, в виде гидромуфты с изменяемым объемом наполнения рабочей жидкостью, жидкостной муфты трения или в виде гидромашины. Гидромашина может представлять собой объемный или шестеренчатый насос, замкнутый по контуру питания и регулируемый через дроссель для обеспечения запирания жидкости. Тормозной механизм может представлять собой систему "гидронасос - гидромотор". Все данные примеры исполнения тормозного механизма равнозначны и могут быть использованы. К ним предъявляется лишь одно условие: они должны обладать функцией выключения и плавного нарастания тормозного момента.
Механизм блокировки может представлять собой любого типа муфту, так как для обеспечения прямой передачи необходимо исключить относительное движение звеньев в дифференциальном механизме, а это выполняется соединением любых двух из трех звеньев в планетарном механизме.
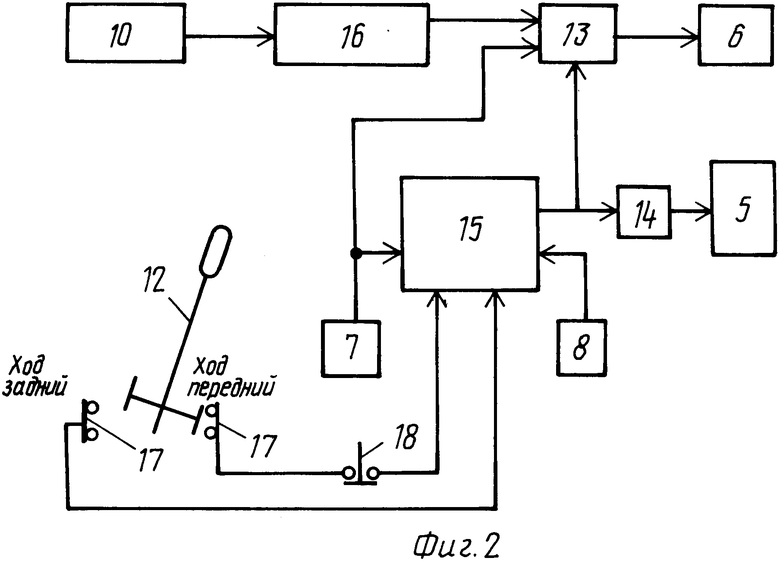
Устройство управления 9 (см. фиг. 2) представлен в виде блок- схемы, конкретное конструктивное исполнение которой зависит от элементной базы и типа применяемых в трансмиссии устройств. Устройство управления включает в себя исполнительные элементы 13 и 14 соответственно тормозного механизма 6 и механизма блокировки 5, блок сравнения 15 и механизм 16 пропорционального изменения усилия, вход которого связан с дроссельной заслонкой 10, а выход - с исполнительным элементом 13 тормозного механизма 6. В зависимости от углового положения дроссельной заслонки сигнал перемещения пропорционально измененный через механизм 16 передается на исполнительный элемент 13 для увеличения тормозного момента на третьем звене дифференциального механизма.
Датчики оборотов 7 и 8 связаны с блоком сравнения 15 сигналов по оборотам с тем, чтобы при равенстве этих сигналов выдать разрешение на исполнительный элемент 14 и включить механизм блокировки 5. При включении механизма блокировки получают прямую передачу. Кроме того, датчик 7 связан с исполнительным элементом 13 для открытия последнего при оборотах вала 1 выше минимально заданных, например, оборотов холостого хода. Только в этом случае происходит изменение тормозного усилия по положению дроссельной заслонки. При этом выход блока сравнения 15 связан с исполнительным элементом 13 для того, чтобы выключать тормозной механизм при включении механизма блокировки.
Положение органа управления 12 изменением направления движения за счет своего коммутатора 17 выдает сигналы на включение блока сравнения 15 при движении вперед и на выключение блока сравнения 15 при движении задним ходом.
Выключатель 18, предусмотренный в связи коммутатора 17 с блоком сравнения 15, позволяет принудительно выключить блок сравнения 15 и, тем самым, исключить режим блокирования дифференциального механизма при движении транспортного средства по пересеченной и горной местности.
Данное устройство управления по предложенной блок-схеме может быть выполнено как в электрическом, гидравлическом, пневматическом, так и ином исполнении, например комбинированном.
Трансмиссия работает следующим образом.
При вращении входного вала 1 приводным двигателем, например карбюраторным двигателем внутреннего сгорания, выходной вал 2 остается неподвижным при условии, что механизм блокировки 5 не заблокирован, и тормозной механизм 6, жестко связанный с дополнительным валом 4 дифференциального механизма 3, не создает на нем тормозного момента. Однако при этом дополнительный вал 4 и ротор тормозного механизма 6, например гидромашины или электродвигателя, вращаются со скоростью, определяемой передаточным числом дифференциального механизма. При воздействии на устройство управления 9 тормозным механизмом 6 с датчика 7 при достижении определенного числа оборотов входного вала 1 на устройство управления 9 поступит сигнал и на дополнительном валу 4 появится тормозной момент, пропорциональный степени воздействия регулирующим элементом на устройство управления 9. Одновременно на выходном валу 2 дифференциального механизма 3 появится крутящий момент, пропорциональный тормозному моменту, приложенному к дополнительному валу 4. Регулирующий элемент устройства управления 9 механическим, электронным или гидравлическим способом связан с педалью управления дроссельной заслонкой 10 карбюратора или аналогичным устройством регулирования подачи топлива дизельного двигателя (рейка топливного насоса). Степень открытия дроссельной заслонки 10 пропорционально по определенному закону определяет степень воздействия на исполнительный элемент 13 и соответственно на тормозной момент на дополнительном валу 4 дифференциального механизма 3 и вращающий момент на выходном валу 2. При превышении вращающим моментом момента торможения стоящего транспортного средства последний начнет движение с постоянным ускорением (при фиксированном положении дроссельной заслонки 10), плавно нарастающим (при увеличении степени открытия дроссельной заслонки 10) или плавно уменьшающимся ускорением (при уменьшении степени открытия дроссельной заслонки).
При движении транспортного средства в определенных дорожных условиях (горизонтальное шоссе с незначительной холмистостью) наступит момент, когда скорости вращения входного 1 и выходного 2 валов дифференциального механизма 3 сравняются или станут достаточно близкими и датчики 7 и 8 подадут сигналы на исполнительный элемент 14 механизма блокировки 5 и исполнительный элемент 13 тормозного механизма 6, и неподвижный в данном случае (при равенстве и однонаправленности угловых скоростей входного и выходного валов) дополнительный вал 4 механически блокируется. Механизм блокировки 5 зафиксирует неподвижный дополнительный вал 4 дифференциального механизма, и транспортное средство продолжит движение как с механической коробкой передач на "прямой" передаче (на высшей передаче). Механизм блокировки 5 в этом режиме может быть разблокирован органом управления 12 механизма переключения направления движения 11, с которым связан выполненный в виде коммутатора 17 включатель питания блока сравнения 15 или электромагнитного механизма блокировки 5, и одновременно будет включен тормозной механизм 6, и система вернется в первоначальное положение.
При движении транспортного средства по пересеченной и горной местности режим с заблокированным дополнительным валом 4 дифференциального механизма 3 может быть исключен выключателем 18, разрывающим цепь питания блока сравнения 15 или электромагнитного блокирующего механизма 5.
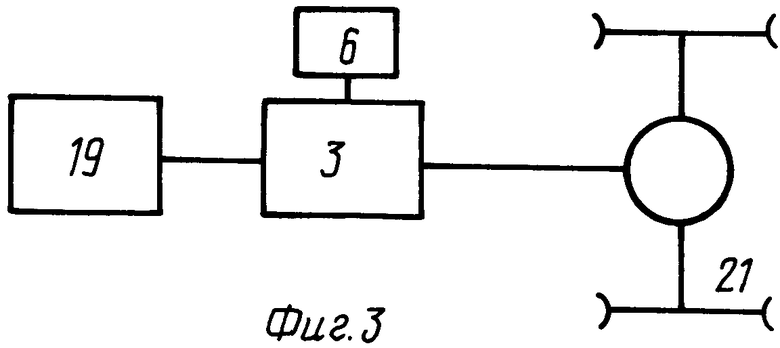
Данная трансмиссия может быть использована для создания компоновочных схем транспортных средств, представленных на фиг. 3-6. На фиг. 3 представлена традиционная компоновочная схема для привода заднего ведущего моста, например, легкового автомобиля. На фиг. 4 представлена схема полноприводного двухосного автомобиля, где от главного приводного двигателя 19 крутящий момент передается на раздаточную коробку 20 для привода колес 21 переднего и заднего мостов. В кинематической цепи привода каждого из этих мостов установлена предлагаемая по изобретению трансмиссия. Особенностью этой схемы является возможность ее трансформации из полноприводной в приводную только одного моста и притом любого.
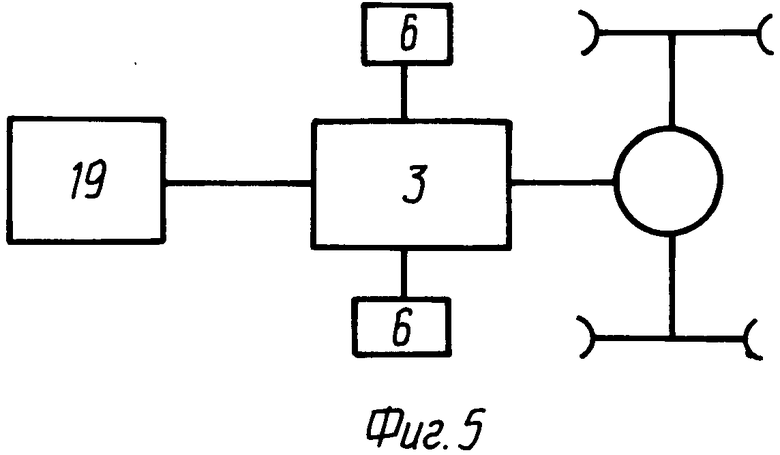
На фиг. 5 представлена компоновочная схема трансмиссии с разнесенными тормозными механизмами. Данная схема удовлетворительна для использования в качестве тормозного механизма систем типа "гидронасос - гидромотор" или "электрогенератор - двигатель". Кроме того, такая схема позволяет уравновесить трансмиссию относительно оси вращения и снизить инерционный момент.
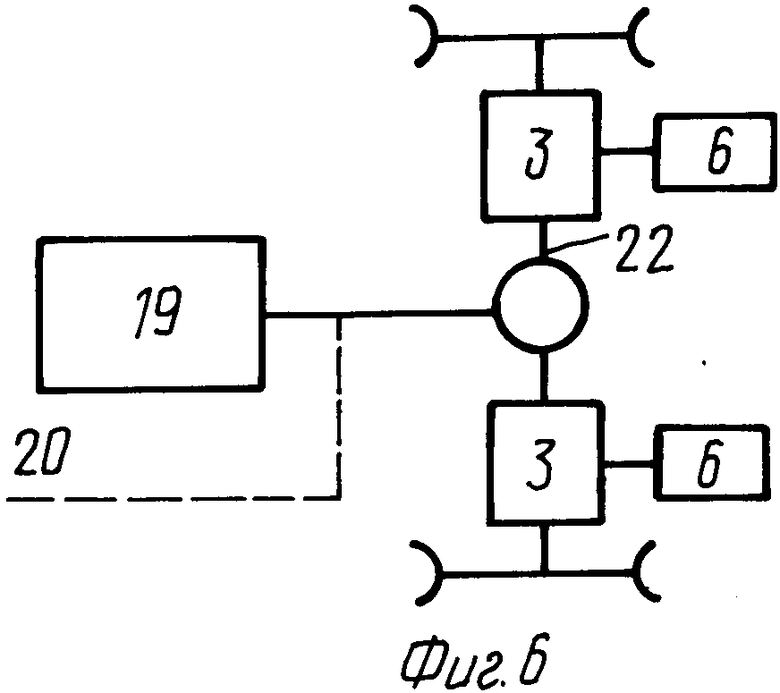
На фиг. 6 представлено транспортное средство с размещением в виде отдельных модулей трансмиссий в каждой полуоси 22 привода колес одного моста. Такая схема позволит осуществлять транспортному средству бортовой поворот по типу гусеничного.
Настоящее изобретение позволяет создать простую и многофункциональную полуавтоматическую трансмиссию для транспортных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комбинированная приводная установка транспортной машины | 1989 |
|
SU1676842A1 |
| Трансмиссия секционной колесной машины, преимущественно трактора с шарнирно-сочлененной рамой | 2022 |
|
RU2796857C1 |
| Привод вспомогательного оборудования | 1988 |
|
SU1654036A1 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
| АКТИВНАЯ ТРАНСМИССИЯ, КОРОБКА ПРЯМОГО ВКЛЮЧЕНИЯ (МЕХАНИЧЕСКАЯ), КОРОБКА СКОРОСТЕЙ С ПЛАНЕТАРНЫМ ФРИКЦИОНОМ И НЕЗАВИСИМОЙ ЗАДНЕЙ ПЕРЕДАЧЕЙ, РАЗДАТОЧНАЯ КОРОБКА С МЕХАНИЗМОМ РАСПРЕДЕЛЕНИЯ КРУТЯЩЕГО МОМЕНТА ОСЯМИ (КОЛЕСАМИ) | 2004 |
|
RU2292270C2 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ АВТОМОБИЛЯ | 2016 |
|
RU2634062C1 |
| АВТОМАТИЧЕСКАЯ СТУПЕНЧАТАЯ ПЛАНЕТАРНАЯ КОРОБКА ПЕРЕДАЧ | 2008 |
|
RU2384773C1 |
| Комбинированная приводная установка транспортной машины | 1988 |
|
SU1535751A1 |
| Гидромеханическая передача | 1982 |
|
SU1054117A1 |
| Двухрежимный дифференциальный механизм распределения мощности | 2024 |
|
RU2837931C1 |

Использование: изобретение относится к транспортному машиностроению. Сущность изобретения: трансмиссия транспортного средства содержит входной вал 1, жестко соединенный с ведущим звеном одно- или двухрядного дифференциального механизма 3, выходной вал 2, кинематически связанный с ведомым звеном этого механизма 3, и дополнительный вал 4, соединенный с тормозным механизмом 6 и механизмом блокировки дифференциального механизма 3. Тормозной механизм 6 и механизм блокировки связаны с устройством управления 9, соединенным с дроссельной заслонкой 10 и органом управления 12 механизма переключения направления движения 11. Датчики 7 и 8 на валах 1 и 2 выдают сигнал при равенстве оборотов на включение блокировки дифференциального механизма 3 и на выключение тормозного механизма. 8 з.п. ф-лы, 6 ил.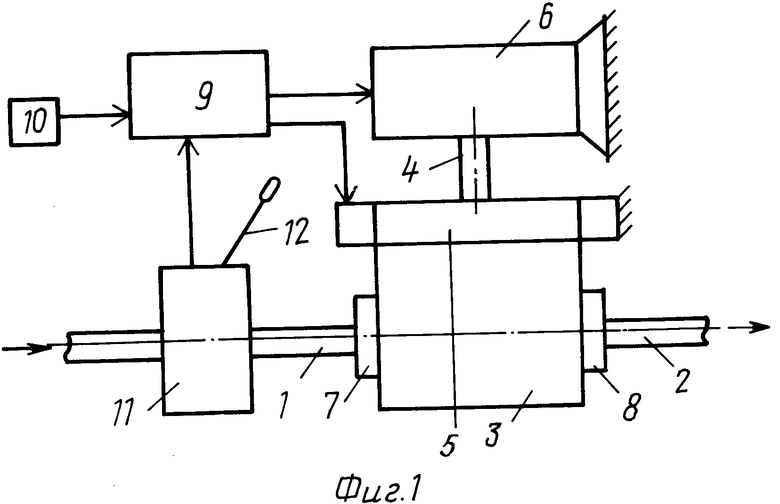
| SU, авторское свидетельство N 1255466, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
