Изобретение относится к авиационной технике, в частности, к электронно-гидравлическим системам и способам автоматического управления воздушным винтом изменяемого шага.
В вышеуказанной области техники известны системы и способы управления воздушными винтами изменяемого шага с обратной связью от винта к регулятору выполненной в виде бета-трубки и взаимно действующего с ней датчика углового положения лопастей. Наличие обратной связи с датчиком позволяет определить текущие углы установки лопастей для последующей передачи информации в электронные средства управления с целью выполнения системой целого ряда функций:
- обеспечения более высокой точности поддерживания частоты вращения и синхрофазирования;
- использования электронных средств регулирования для ручного убавления шагом воздушного винта;
- использования цифрового электронного модуля для реализации всережимного следящего упора (безопасного полетного шага);
- обеспечения активного рабочего диагностирования функционирования системы управления и установления ее ресурса по техническому состоянию;
- сигнализации о переходе лопастей ниже упора малого шага.
Наличие в системе управления информационного канала о текущем угле установки лопастей характеризует данную систему, как соответствующую современным требованиям.
Известна система управления воздушным винтом изменяемого шага обратной схемы, содержащая электронный блок управления частотой вращения винта с электрогидравлическим преобразователем и гидравлическую часть, включающую каналы управления шагом винта с элементами регулирования и гидромеханический ограничитель максимальной частоты вращения, а также механизм обратной связи от винта к регулятору в виде бета-трубки и взаимодействующего с ней линейного датчика углового положения лопастей, электрически связанного с электронным блоком управлений [1].
Известна также система управления, выбранная в качестве прототипа, которая, в принципе, содержит вышеперечисленные типовые признаки, что и в системе [1], но с конкретными взаимосвязями, определяемыми прямой схемой работы винта, в которой сохранение надежности в случае отказа отдельных элементов обеспечивается применением противовесов на лопастях винта, переводящих лопасти в сторону увеличения углов установки для сохранения положительной тяги и безопасности полета [2].
Недостатком обеих известных систем является то, что узел датчика углового положения лопастей прикреплен к корпусу редуктора, в то время как узел бета-трубки, взаимодействующий с датчиком, сцеплен с деталями механизма изменения шага винта. Поэтому при замере текущих углов установки лопастей на работу датчика отрицательно влияют наличие люфта в подшипнике, установленном на валу привода винта, а также разновеликие температурные деформации деталей винта и редуктора в осевом направлении. Указанные отрицательные факторы, дающие суммарную погрешность существенной величины, не позволяют использовать сигнал текущего углового положения лопастей для организации защитных средств винта при отказах, так как возможно ложное их срабатывание.
Отсутствие в известных системах средств защиты от неконтролируемой загрузки винта с использованием прямого параметра, характеризующего рабочее положение тягового элемента винта, каким является сигнал текущего углового положения лопастей, приводит к провалу частоты вращения до недопустимого уровня, падению тяги и возникновению аварийной ситуации, например, из-за возникновения разнотяговости соседних силовых установок самолета.
Известен способ управления воздушным винтом изменяемого шага с обратной связью, снабженным электронным регулятором частоты вращения и гидромеханическим ограничителем максимальной частоты вращения, заключающийся в том, что в полости управления шагом винта направляют рабочую жидкость с переменным давлением, которое меняют на эксплуатационных режимах работы воздушного винта с помощью электронного регулятора частоты вращения, при отказе которого предусматривают аварийную защиту винта от раскрутки посредством перехода управления винта от электронного регулятора на управление от гидромеханического ограничителя максимальной частоты вращения, с помощью которого вырабатывают управляющий сигнал регулируемого давления, пропорциональный величине раскрутки винта для перевода лопастей винта на большие углы установки до значений углов, при которых частота вращения винта становится равной величине настройки гидромеханического ограничителя [1, 2].
Недостатком известного способа управления, принятого за прототип, является то, что он не обеспечивает высокой надежности работы системы управления винтом, поскольку не содержит приемов воздействия на регулируемый объект с использованием сигнала текущего углового положения лопастей с целью обеспечения защиты винта от неконтролируемой загрузки и провала частоты вращения до недопустимого уровня.
Технический результат, который может быть получен при осуществлении изобретения, состоит в повышении точности замера текущих углов установки лопастей путем устранения отрицательного влияния на работу датчика углового положения лопастей люфта подшипника, установленного на валу привода винта, и разновеликих температурных деформаций деталей винта и редуктора в осевом направлении.
Технический результат от использования изобретения также заключается в повышении надежности работы системы убавления путем введения в нее средств защиты от неконтролируемой загрузки винта с использованием сигнала текущего углового положения лопастей
Указанный технический результат достигается тем, что в системе управления воздушным винтом изменяемого шага с обратной связью в виде бета-трубки и взаимодействующего с ней датчика углового положения, содержащей электронный блок управления частотой вращения винта с электрогидравлическим преобразователем и гидравлическую часть, включающую каналы управления шагом винта с элементами регулирования и гидромеханический ограничитель максимальной частоты вращения, особенность заключается в том, что корпус датчика углового положения лопастей механически связан в осевом направлении с корпусом винта или валом привода винта через узел подшипника, а между электрогидравлическим преобразователем и гидромеханическим ограничителем максимальной частоты вращения, с одной стороны, и механизмом изменения шага винта, с другой стороны, в каналах управления шагом винта дополнительно установлен, приводимый электромагнитным клапаном, золотник перехода с управления от электронного блока на убавление от гидромеханического ограничителя максимальной частоты вращения, при этом, электромагнитный клапан электрически связан с датчиком углового положения лопастей через электронный блок управления.
Указанный технический результат достигается также тем, что в способе убавления воздушным винтом изменяемого шага с обратной связью, включающей электрический датчик замера текущего угла установки лопастей винта, заключающемся в том, что частоту вращения воздушного винта поддерживают с использованием электронного регулятора, а превышение частоты вращения сверх заданной величины ограничивают гидромеханическим ограничителем максимальной частоты вращения, особенность состоит в том, что с помощью электронного регулятора также вычисляют расчетный угол установки лопастей в зависимости от заданного режима работы и условий полета, сравнивают с измеренным электрическим датчиком обратной связи текущим углом установки лопастей и в случае превышения фактического угла над расчетным углом выше заданного значение, для предотвращения бесконтрольного падения частоты вращения винта, выдают командный сигнал на переход управления винтом от электронного регулятора к гидромеханическому ограничителю максимальной частоты, которым изменяют давление рабочей жидкости на перевод лопастей винта на меньшие углы установки до значения углов, приводящих к возрастанию частоты вращения винта до величины настройки гидромеханического ограничителя максимальной частоты вращения.
Совокупность признаков, перечисленных в соответствии с формулой изобретения на систему и способ управления, полностью обеспечивая достижение вышеизложенного технического результата, доказывает тем самым существенность этих признаков.
Заявляемая группа изобретений соответствует требованию единства изобретения, поскольку образует единый изобретательский замысел, причем, один из объектов группы - система управления - позволяет осуществить другой рассматриваемый объект группы -способ, при этом, оба объекта направлены на решение одной и той же задачи с получением единого технического результата.
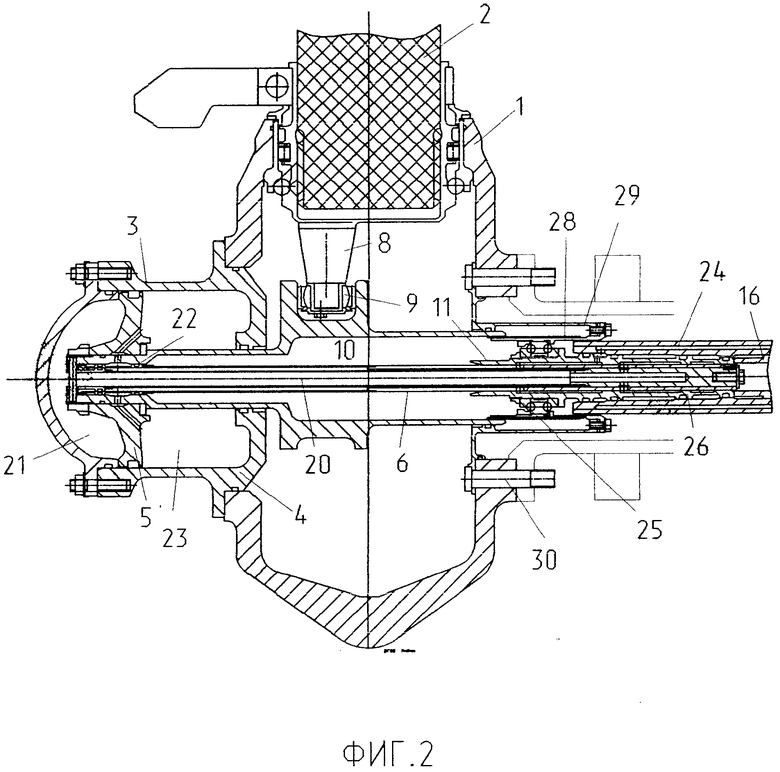
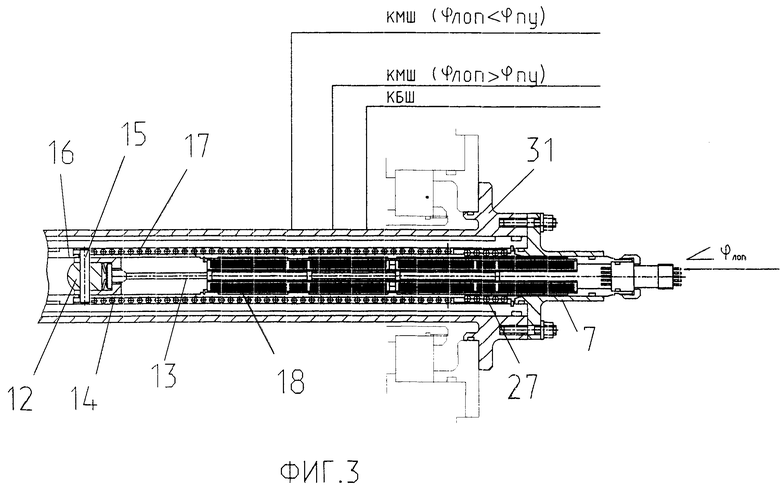
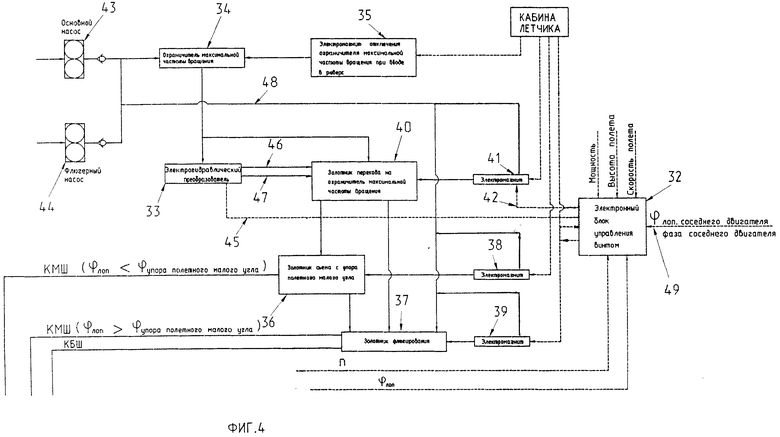
На фиг. 1 изображена система управления с воздушным винтом и элементами его управления, разрез; на фиг. 2 - воздушный винт изменяемого шага, разрез; на фиг. 3 - узел датчика углового положения лопастей винта; на фиг. 4 - структурная блок-схема системы управления.
Изобретение ставит целью создать способ и систему управления шагом воздушного винта с обратной связью, предназначенного для применения на самолете. Воздушный винт содержит корпус 1, в рукавах которого посредством подшипников закреплены лопасти 2, из которых показана только одна, детали цилиндрово-поршневой группы, включающей цилиндр 3 с перегородкой 4 и поршень 5 скрепленный с элементами обратной связи от винта к регулятору, выполненными в виде бета-трубки и взаимодействующего с ней линейного датчика 7 углового положения лопастей. На комлевом конце лопасти расположен эксцентричный палец 8 со сферическим подшипником 9, вставленным в паз траверсы 10, скрепленной с поршнем 5 механизма изменения шага винта.
Бета-трубка 6, скрепленная с траверсой 10 и поршнем 5, своим правым концом сопряжена с маслопроводящей трубкой 11 и через сферический наконечник 12 взаимодействует с сердечником 13 линейного датчика 7 углового положения лопастей 2.
Сердечник 13 электрического линейного датчика 7 не имеет жесткой механической связи с бета-трубкой 6 и своим выходным пояском размещен в плунжере 14, который через палец 15, перемещаемый в продольных пазах корпуса 16 датчика 7, постоянно поджат пружиной 17 к торцу бета-трубки, как выше указано, через наконечник 12. В результате такого исполнения связи бета-трубки 6 с сердечником 13 избегают вращения последнего, так как корпус 16 датчика зафиксирован относительно статора редуктора двигателя посредством стопорного элемента. При этом в диапазоне углов, соответствующих крейсерскому режиму полета, до углов, соответствующих режиму флюгирования винта, электрический линейный датчик 7 отсоединен от бета-трубки 6 в результате упора пальца 15 плунжера 14 в торец пазов корпуса 16 датчика. Вследствие этого сокращается длина маслоподводящей трубки 11 вала привода и общая длина двигателя.
Датчик 7 представляет собой линейный дифференциальный трансформатор, имеющий три обмотки 18, средняя из которых является рабочей, запитанной переменным током высокой частоты, а две крайние - измерительными, напряжение в которых меняется пропорционально перемещению сердечника 13, выполненного из материала, обеспечивающего высокую проницаемость электромагнитному полю высокой частоты. Датчик выполнен сдвоенным для повышения надежности работы.
Узел бета-трубки 6 включает на правом своем конце золотник 19, на внутреннем диаметре отверстия которого жестко закреплена внутренняя трубка 20 малого диаметра, обеспечивающая подвод масла в полость малого шага 21. Наружная трубка 6 снабжена проставкой 22 с уплотнениями по центрирующим пояскам и служит для подвода масла в полость большого шага 23. Сочетание наружной трубки 6 с проставкой 22 и внутренней трубки 20 придает узлу упругость по длине, что необходимо для обеспечения работоспособности узла, поскольку правый конец его центрируется в маслопроводе вала привода 24, а левый конец - в маслопроводе самого винта. Несоосность установки концов бета-трубки компенсируется упругой деформацией внутренней трубки 20.
Корпус 16 датчика углового положения лопастей механически связан в осевом направлении с корпусом 1 винта или валом 24 привода винта через узел подшипника 25. При этом корпус 16 датчика постоянно поджат к втулке 26 узла бета-трубки пружиной 27 и вместе с узлом подшипника 25, шлицевой втулкой 28 и промежуточной гильзой 29 образуют единый механически связанный в осевом направлении пакет деталей, прикрепленный к корпусу 1 винта болтами 30. Подшипник 25, осуществляя переход от статорных деталей к роторным, обеспечивает работоспособность указанного пакета деталей. В радиальном направлении подвеска деталей указанного пакета осуществлена посредством размещения втулки 26, корпуса 16 датчика и маслопроводящей трубки 11 в маслопроводе 24 вала привода винта, который, в свою очередь, скреплен с картером редуктора 31.
Вышеописанные элементы, входящие в узел бета-трубки 6, и датчик 7 углового положения лопастей являются составными частями системы управления, размещенными в конструкции винта. Кроме них система управления содержит также другие элементы регулирования, а именно: электронный блок управления 32, электрогидравлический преобразователь 33, гидромеханический ограничитель 34, электромагнит 35 отключения ограничителя максимальной частоты вращения при вводе в реверс, золотник съема с упора полетного малого газа З6, золотник флюгирования 37, электромагнитные клапаны 38 и 39 управления, соответственно золотниками 36 и 37. В каналах управления шагом винта дополнительно установлен золотник 40 перехода на управление частотой вращения винта от ограничителя максимальной частоты вращения с электромагнитным клапаном 41, электрически связанным с датчиком 7 углового положения лопастей через электронный блок 32 (условное изображение упомянутой связи показано линией 42). Энергетическое питание элементов системы и винта обеспечено посредством маслонасосов: основного 43 и флюгерного 44.
Работа системы управления, раскрывающая, при этом также существо и исполнение заявляемого способа, происходит следующим образом.
Изменение шага винта для поддержания установленного значения частоты вращения осуществляют посредством направления рабочей жидкости переменного давления на одну или другую стороны поршня 5, что вызывает линейное перемещение поршня и поворот связанных с ним лопастей 2. Если нагрузка на лопасти 2, которая меняется в зависимости от угла их установки и от других факторов, уравновешивается общим давлением рабочей жидкости на поршень 5, в противоположном нагрузке направлении, лопасти остаются в неизменном положении. При различии давления и нагрузки происходит поворот лопастей в новое положение до тех пор, пока не восстановится равновесие между вышеописанными действующими силами и пока двигатель не будет вращаться с установленной частотой вращения.
Давление рабочей жидкости меняют с помощью электронного блока управления 32, командный электрический сигнал с которого подают на электрогидравлический преобразователь 33 по линии связи 45. Преобразователь 33 формирует гидравлический управляющий сигнал, подает его через золотник 40 и, далее, через золотники 36 и 37 в каналы малого и большого шага и полости 21 и 23 управления винтом. В системе управления на случай отказа электронного блока предусмотрена дублирующая система управления в виде гидромеханического ограничителя 34 максимальной частоты вращения, предотвращающего раскрутку винта. В данной системе при частоте вращения, например, 105%, управляющий элемент ограничителя максимальной частоты 34 прекращает подачу рабочей жидкости высокого давления к электрогидравлическому преобразователю 33 и, следовательно, в механизм изменения шага винта. Поскольку винт выполнен по прямой схеме с противовесами на комлях лопастей 2, то дальнейшего уменьшения шага происходить не может. Со снижением частоты вращения ниже 105% значения происходит возврат под контроль электронного блока управления 32 с подачей убавляющего сигнала в механизм изменения шага винта от электрогидравлического - преобразователя 33. Текущее положение поршня 5 в цилиндре 3, которое определяет фактическое значение шага лопастей, постоянно контролируется линейным дифференциальным датчиком 7, который взаимодействует с бета-трубкой 6 и направляет сигнал обратной связи в электронный блок 32 управления. Выработка сигнала обратной связи происходит в результате перемещения бета-трубки 6 совместно с траверсой 10 при изменении шага лопастей 2 и взаимодействия со сферическим наконечником 12. Далее это усилие через палец 15 и плунжер 14 передается сердечнику 13 датчика 7 углового положения. Перемещение сердечника 13 относительно средней из обмоток 18, запитываемой переменным током высокой частоты, изменяет магнитное поле этой обмотки. Изменяющееся магнитное поле рабочей обмотки наводит ЭДС в измерительных крайних обмотках, с выходов которых снимают электрический сигнал, пропорциональный угловому положению лопастей относительно втулки винта.
Высокая точность замера текущих углов установки лопастей, необходимая для повышения точности регулирования и надежности работы системы защиты от не контролируемой загрузки винта на полетных режимах, достигается, как уже выше отмечалось, посредством механической постоянной связи корпуса 16 датчика 7 в осевом направлении с корпусом 1 винта. В результате этого устраняется негативное влияние на точность замера как люфта в подшипнике 45 вала привода винта, так и различных по величине температурных деформаций корпусных деталей редуктора и винта в осевом направлении.
При неконтролируемой загрузке винта на полетных режимах электронный блок управления 32, получив текущую информацию об угле установки лопастей от датчика 7 и сравнив ее с расчетным значением для данного режима работы и условий полета, при возникновении недопустимого рассогласования значений этих углов выдает команду на электромагнитный клапан 41 золотника 40. Последний, прерывая каналы связей 46 и 47, осуществляет переход с управления винта от электронного блока 32 на управление от гидромеханического ограничителя 34 максимальной частоты вращения, который по каналу 48 падает высокое давление рабочей жидкости через золотники 40 и 36 в канал малого шага. При этом уменьшение загрузки винта происходит переводом лопастей на меньшие углы установки до значений углов, приводящих к возрастанию частоты вращения винта до величины настройки гидромеханического ограничителя, с последующим поддержанием этого максимального значения частоты вращения.
Вышеописанный процесс защиты винта при неконтролируемой его загрузке на полетных режимах с использованием прямого параметра, характеризующего рабочее состояние тягового элемента винта, в дополнение к защите от превышения частоты вращения, надежно предотвращает возникновение аварийной ситуации.
При этом следует также отметить расширение функций, исполняемых ограничителем максимальной частоты вращения, являющимся в данной системе как средством защиты от раскрутки винта, так и средством защиты от провала частоты его вращения.
Золотник переключения 40, управляемый электромагнитным клапаном 41, при полном отказе бортовой системы электропитания срабатывает под давлением пружины и включает в работу ограничитель максимальной частоты 34. Кроме вышеописанных функций, система управления осуществляет также целый ряд других, например:
- формирует программу управления частотой вращения винта по условиям полета для оптимизации характеристик силовой установки с точки зрения экономичности;
- обеспечивает синхронизацию их и синхрофазирование, используя сигнал фазы и угла установки лопастей винта соседней силовой установки, поступающий в электронный блок управления 32 по линии связи 49;
- управляет шагом лопастей при бета-регулировании;
- флюгирует винт посредством подачи высокого давления в канал большого шага через золотник 37 по командам пилота или электронного блока 32, поступающим на электромагнитный клапан 39;
- загружает винт через флюгерный золотник 37 сигналом от электронного блока при раскрутке винта.
В системе управления также реализован упор минимального полетного угла на основе следящей системы: гильза 26 - золотник 19 в узле бета- трубки.
Данные функции системы управления упомянуты вкратце, как неотносящиеся к сути изобретения.
Промышленная применимость данной системы управления воздушным винтом изменяемого шага с обратной связью, выполненной в соответствии с заявляемым способом, подтверждается практической апробированностью входящих в нее узлов и отдельных элементов в системах управления отечественных и зарубежных разработок. Использование электронных средств управления для вычисления расчетного угла установки лопастей, сравнения с измеренным текущим углом и выдачи командного сигнала также не может внести сомнений в части реализации изобретения, поскольку известны электронные средства управления шагом, обеспечивающие защиту винта по крутящему моменту на валу привода. Однако такие системы управления имеют меньшую точность регулирования и менее надежную защиту винта, поскольку крутящий момент является косвенным параметром, характеризующим рабочее положение тягового элемента винта. При этом сложность исполнения известной системы с защитой по крутящему моменту и заявляемой системы одинаковы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ФЛЮГЕРНО-РЕВЕРСИВНЫМ ВОЗДУШНЫМ ВИНТОМ ДЛЯ САМОЛЕТОВ МЕСТНЫХ АВИАЛИНИЙ | 1996 |
|
RU2099241C1 |
| ВОЗДУШНЫЙ ВИНТ ИЗМЕНЯЕМОГО ШАГА И СПОСОБ ИЗМЕРЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЕГО ЛОПАСТЕЙ | 1996 |
|
RU2099242C1 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ РЕВЕРСИВНЫМ ВИНТОВЕНТИЛЯТОРОМ | 1996 |
|
RU2101212C1 |
| СООСНЫЙ ВОЗДУШНЫЙ ВИНТ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 1996 |
|
RU2099243C1 |
| ТЕПЛОВАЯ ПРОТИВООБЛЕДЕНИТЕЛЬНАЯ СИСТЕМА ВРАЩАЕМОГО ЭЛЕМЕНТА | 1996 |
|
RU2093426C1 |
| СПОСОБ ПОЛУЧЕНИЯ МЕТАЛЛОПОЛИМЕРНОГО КОНСТРУКЦИОННОГО МАТЕРИАЛА | 1997 |
|
RU2121012C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОПТИКО-ФИЗИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТОВ | 1997 |
|
RU2107281C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ ПРОТИВООБЛЕДЕНИТЕЛЬНЫХ ЭЛЕМЕНТОВ ВИНТА САМОЛЕТА | 1996 |
|
RU2098323C1 |
| ЛИНИЯ ПЕРЕРАБОТКИ ШИН | 1997 |
|
RU2116132C1 |
| РОТОРНО-ВИХРЕВОЙ АППАРАТ | 1996 |
|
RU2098201C1 |
Использование: изобретение относится к авиационной технике. Сущность: система управления воздушным винтом изменяемого шага с обратной связью в виде бета-трубки и взаимодействующего с ней датчика углового положения лопастей содержит электронный блок управления частотой вращения винта и гидравлическую часть. Система снабжена золотником перехода с управления от электронного блока управления на управление от гидромеханического ограничителя максимальной частоты вращения винта. 2 с. и 11 з.п. ф-лы, 4 ил.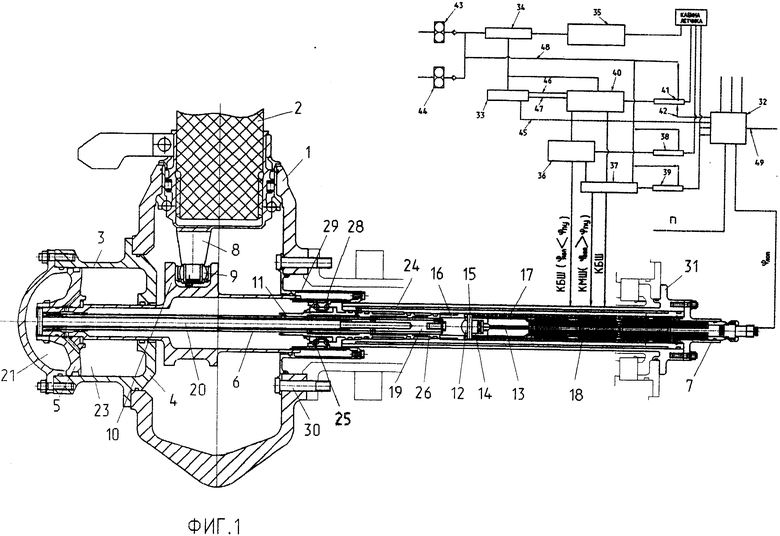
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США N 5174717, кл | |||
| Приспособление для автоматического тартания | 1922 |
|
SU416A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| Рекламный выставочный листок фирмы Dowty Aerospase Gloucester (Великобритания), 1990. | |||
