Изобретение относится к авиационной технике и, в частности, к системам управления флюгерно-реверсивными воздушными винтами для самолетов местных авиалиний.
Одним из главных критериев и качеств, предъявляемых к самолетам местных воздушных линий это простота в эксплуатации и обслуживании, не требующая высокой квалификации летного и эксплуатирующего состава, а также интенсивная эксплуатация с большим количеством взлетов и посадок на аэродромы с короткой длиной взлетно-посадочной полосы. Указанные критерии предопределяют требования к системе управления силовых установок таких самолетов:
простота и надежность конструкции;
эффективный реверс тяги при посадке;
надежное удержание лопастей на упоре промежуточного угла;
наличие управляемого плавного реверса тяги при рулении.
Известна система управления шагом воздушного винта с гидромеханизмом изменения угла установки лопастей с полостями большого и малого шага и управляющим золотником винта, выполненным заодно со штоком гидромеханизма, а также командным клапаном снятия лопастей с упора промежуточного угла, регулятором управления углом установки лопастей винта, источником давления рабочей жидкости, и рычагом управления двигателем (РУД) [1]
Недостаток указанной системы управления шагом с гидромеханизмом изменения угла установки лопастей воздушного винта состоит в том, что она не обеспечивает плавного управления углом установки лопастей по положению рычага управления двигателем на режиме реверса и при маневрировании самолета на земле, а реализация функции флюгирования с подачей рабочей жидкости высокого давления в полость большого шага требует организации в системе отдельного дополнительного канала управления, не связанного с каналом управления полостью малого шага.
Известна также система управления флюгерно-реверсивным воздушным винтом прямой схемы, содержащая гидромеханизм с "бета"-трубкой, систему гидравлических каналов, которые расположены в задающей гильзе ручного управления шагом винта и гидравлически соединены с полостями большого и малого шага, а также регулятор винта с маслонасосом, предохранительным клапаном, клапаном флюгирования и электроприводным флюгерным насосом [2]
Недостатком этой системы управления воздушным винтом является то, что она применима только для определенных типов конструкций двигателя, имеющих смещенный (относительно оси турбокомпрессора) вал привода винта и сложна в изготовлении, так как управление шагом лопастей от регулятора винта осуществляется по двум каналам и по сигналам от электронной системы с электроисполнительными механизмами, надежность которых ниже надежности простых гидромеханических систем управления шагом винта, имеющих более широкое применение на самолетах местных авиалиний из-за простоты и дешевизны.
Известна наиболее близкая по технической сущности и решаемой задаче система управления флюгерно-реверсивным воздушным винтом прямой схемы для самолетов местных авиалиний, содержащая гидромеханизм изменения угла установки лопастей с поршнем и пружиной флюгирования, полостью малого шага, управляемой от регулятора винта с помощью одного канала. При этом регулятор винта содержит маслонасос с редукционным клапаном, пружина которого изменяет затяжку пропорционально перемещению РУД [3]
Недостатками указанной выше системы управления воздушным винтом является следующее
возможность несанкционированного снятия лопастей с упора промежуточного угла при уменьшении частоты вращения воздушного винта ниже минимального полетного значения, например, в случае отказа в системе топливопитания. В этом случае внезапно уменьшается поперечная составляющая от центробежных сил грузов, расположенных на комлях лопастей, что приводит к уменьшению необходимого избытка сил для надежного удержания лопастей на промежуточном упоре;
низкая точность установки лопастей на режиме управления шагом от РУД, так как в балансе перестановочных сил, действующих на гидромеханизм, участвуют нестабильные силы трения в поршне и заделке лопастей;
не обеспечивается эффективная перекладка лопастей в реверс и обратно, из-за недостаточных скорости перекладки лопастей и усилий на поршне в связи с тем, что на режиме ручного управления шагом перемещение поршня происходит изменением давления только в одной полости малого шага.
Технический результат, получаемый при реализации данного изобретения, заключается в:
создании надежной одноканальной гидромеханической системы с двухсторонним управлением механизмом изменения шага воздушного винта;
повышении надежности удержания лопастей на упоре промежуточного угла (ПУ);
повышении точности управления углом установки лопастей на режиме ручного управления;
обеспечении эффективного реверса тяги воздушного винта на режимах посадки и маневрирования на земле.
Указанный технический результат при осуществлении изобретения достигается тем, что в заявляемой системе управления флюгерно-реверсивным воздушным винтом, содержащей размещенный во втулке винта гидромеханизм изменения угла установки лопастей с поршнем, пружиной флюгирования, упором промежуточного угла и управляющим золотником винта, проточки которого соединены с полостями большого и малого шага, а также управляющий элемент регулятора шага с золотником снятия лопастей с упора промежуточного угла, маслонасос, редукционный клапан с пружиной и рычаг управления двигателем, особенность заключается в том, что упор промежуточного угла выполнен в виде подпружиненного плунжера, расположенного перед поршнем гидромеханизма, а управляющий золотник винта размещен в поршне с возможностями ограниченного осевого перемещения и взаимодействия с плунжером, при этом у торца управляющего золотника со стороны, противоположной плунжеру, выполнена полость, соединенная каналом с управляющим элементом регулятора шага, причем управляющий элемент соединен каналом с золотником снятия лопастей с упора промежуточного угла, а редукционный клапан оснащен устройством изменения затяжки его пружины, кинематически соединенным с рычагом управления двигателем.
Сущность изобретения поясняется чертежом, на котором показана система управления флюгерно-реверсивным воздушным винтом для самолетов местных авиалиний, включающая воздушный винт, регулятор винта и элементы самолетной системы управления.
Согласно приведенному чертежу, система управления флюгерно-реверсивным воздушным винтом содержит втулку воздушного винта 1, скрепленную с валом 2 редуктора двигателя, и лопасти 3. Втулка воздушного винта 1 гидравлически связана с регулятором винта 4 посредством канала 5 и содержит гидромеханизм изменения угла установки лопастей, состоящий из гидроцилиндра 6 с поршнем 7. Последний скреплен при помощи штока 8 с траверсой 9. В пазу 10 траверсы 9 расположены пальцы II лопастей 3. Гидроцилиндр 6 и поршень 7 образуют полость 12 большого шага (БШ) и полость 13 малого шага (MШ). В полости БШ размещена пружина флюгирования 14.
Регулятор винта 4 содержит маслонасос 15, редукционный клапан 16 с пружиной 17, золотник центробежного механизма 18, соединенный через обратный клапан 19 с насосом 15. Имеется также золотник снятия лопастей с упора промежуточного угла 20, золотник флюгирования 21, кинематически связанный с рычагом флюгирования в кабине пилота, электроприводной флюгерный насос 22.
Для достижения вышеуказанного технического результата в систему управления воздушным винтом введен управляющий золотник 23, размещенный в штоке 8 траверсы 9. Управляющий золотник 23 содержит проточку большого шага 24, проточку малого шага 25 и проточку слива 26, соединенную с каналом слива 27 в штоке траверсы 9. Осевое движение управляющего золотника 23 относительно траверсы 9 ограничено стопором 28, закрепленным в штоке 8 и размещенным в сквозных прорезях 30 на боковой поверхности золотника 23.
Полость 29 со стороны правого торца управляющего золотника 23 соединена с гидроканалом 5 посредством трубки 31, неподвижно скрепленной с валом 2 редуктора двигателя и телескопически соединенной со штоком 8 траверсы.
Гидроцилиндр 6, шток 8 траверсы 9 и левый торец управляющего золотника 23 образуют полость, которая соединена со сливом и в которой соосно управляющему золотнику 23 размещен подвижный плунжер 32 с пружиной 33. Ход подпружиненного плунжера 32 в сторону управляющего золотника 23 ограничен выступом 34.
От РУД, расположенного в кабине летчика, через тяги 35 передается воздействие к рычагам регулятора 4, соединенным с кулачком 36 изменения затяжки пружины 17 редукционного клапана 16 и с кулачком 37 переключения золотника снятия с упора 20.
Над золотником центробежного механизма 18 размещен поршень 38 со штоком 39, а полость 40 над поршнем 38 соединена с золотником снятия с упора 20.
Рычаг рода работ 41 расположен в кабине пилота и кинематически связан с регулятором винта 4, а также со стоп-краном топливного агрегата.
Работа заявляемой системы управления флюгерно-реверсивным воздушным винтом происходит следующим образом.
При работе двигателя на режиме, равном или выше полетного малого газа (ПМГ), лопасти воздушного винта находятся на углах установки выше промежуточного упора и масло под давлением от маслонасоса 15 через обратный клапан 19 поступает к золотнику центробежного механизма 18. При этом величина давления, создаваемого редукционным клапаном 16, определяется усилием пружины 17, величина сжатия которой устанавливается поворотом кулачка 36.
В технике широко известны конструкции агрегатов системы управления, обеспечивающие необходимую частоту вращения воздушного винта воздействием на шаг лопастей. В рассматриваемом случае частота вращения винта меняется центробежным механизмом регулятора 4 с золотником тахометра 18. Величина управляющего давления от центрального буртика последнего через проточку на золотнике флюгирования 21 по каналу 5 и трубке 31 поступает во вращающийся винт 1 в полость 29 к управляющему золотнику 23.
В связи с тем, что на левый торец управляющего золотника 23 действует давление слива, а со стороны правого торца усилие пружины и регулируемое давление от золотника центробежного механизма 18, золотник 23 под действием разницы усилий находится в крайнем левом положении относительно штока траверсы 9. В этом положении он удерживается стопором 28. При этом регулируемое давление через проточку 25 золотника 23 поступает в полость малого шага 13 и действует на поршень 7. Перемещение поршня 7 приводит к перемещению траверсы 9, связанной с поршнем штоком 8. Траверса через пальцы II, расположенные в пазу 10, поворачивает лопасти 3.
В рассматриваемый момент времени противоположная полость большого шага 12 находится под давлением слива, так как через проточку 26 управляющего золотника 23 указанная полость соединена со сливным каналом 27. Повороту лопастей в сторону большого шага способствуют только пружина 14 и противовесы лопастей.
При установке РУД в положение ПМГ (полетный малый газ) и достижении в полете углов установки лопастей, равных или близких углу промежуточного упора, шток 8 траверсы 9, двигаясь влево, достигает такого положения, когда управляющий золотник 23 левым торцом касается плунжера 32, нагруженного слева усилием пружины 33.
При дальнейшем движении поршня 7 со штоком 8 в сторону уменьшения угла установки лопастей происходит смещение управляющего золотника 23 вправо относительно штока 8, так как перемещению золотника препятствует плунжер 32, усилие пружины которого выбрано таким, чтобы командное давление, действующее на правый торец золотника 23 и определяемое величиной затяжки пружины 17 редукционного клапана 16, не в состоянии было преодолеть усилие пружины 33. Движение поршня 7 со штоком 8 происходит до тех пор, пока управляющий золотник 23 не перекроет поступление командного давления из проточки 25 в полость малого шага 13. Одновременно с этим командное давление через проточку 24 золотника 23 подводится в полость большого шага 12, что приводит к росту усилия в указанной полости в сторону большого шага. На поршне 7 создается равенство сил, лопасти винта останавливаются на угле промежуточного упора.
При посадке, когда возникает необходимость применения реверса и торможения самолета, рычаг управления двигателем перемещают из положения ПМГ в реверсивный диапазон или диапазон установки шага лопастей по положению РУД ("бета"-режим). При этом, тяга 35 через кулачок 37 перемещает золотник снятия с упора 20 в нижнее положение. В результате высокое давление жидкости от маслонасоса 15 поступает в полость 40 над поршнем перенастройки 38 и перемещает последний вместе со штоком 39 в нижнее положение, преодолевая небольшое усилие, действующее с противоположной стороны поршня 38 от давления из магистрали двигателя.
Шток 39, взаимодействуя с золотником центробежного механизма 18, принудительно смещает его в нижнее положение, выключая из работы, и обеспечивает подачу жидкости от гидронасоса непосредственно во втулку воздушного винта 1.
Одновременно с перемещением золотника снятия с упора 20 и выключением из работы золотника центробежного механизма 18 тяга 35 через поворот кулачка 36 осуществляет затяжку пружины 17 редукционного клапана 16. Увеличение усилия пружины 17 приводит к повышению давления, развиваемого насосом 15. Как указывалось ранее, давление жидкости, поступающей во втулку воздушного винта 1 от регулятора 4, действует на правый торец управляющего золотника 23. При увеличении давления выше определенного значения золотник 23 преодолевает усилие пружины 33 плунжера 32 и перемещается относительно штока 8 влево до тех пор, пока его смещение не будет ограничено стопором 28.
Указанное перемещение управляющего золотника приводит к снижению давления жидкости в полости большого шага 12, которое ранее удерживало лопасти на упоре промежуточного угла, вследствие того, что полость 12 сообщается со сливным каналом 27 через проточку 26 управляющего золотника 23. В то же время в полость малого шага 13 через проточку 25 золотника 23 поступает жидкость с давлением, определяемым настройкой редукционного клапана 16. Под действием разности давлений в полостях большого и малого шага поршень 7, преодолевая усилие пружин 14, 33 и момент от грузов на лопастях 3, совместно с траверсой 9 снимаются с упора промежуточного угла и движутся в сторону уменьшения шага лопастей.
Перемещение управляющего золотника 23 в штоке 8, а, следовательно, и механизма изменения шага на режиме ручной установки шага по РУД, будет происходить до тех пор, пока давление от маслонасоса 15, поступающее к правому торцу золотника 23 и задаваемое затяжкой пружины 17 редукционного клапана непосредственно от РУД в кабине пилота, не уравновесится усилием пружины 33.
Таким образом, пилот, перемещая РУД на земных режимах работы силовой установки самолета, включая рулежку и запуск двигателя, может непосредственно из кабины управлять положением лопастей в "бета"-диапазоне. При этом соблюдается пропорциональность между перемещением РУД и получаемым углом лопастей винта, т. е. чем сильнее сжата пружина 17 от действия РУД, тем больше давление, действующее на правый торец управляющего золотника 23 и тем больше он перемещается влево, сжимая пружину 33 плунжера 32. В результате зультате этого в полости МШ давление возрастает, а в полости БШ, наоборот, падает. Под действием разности давлений в полостях винта поршень 7 с большой перестановочной силой перемещается на уменьшение шага лопастей вплоть до максимального угла реверса.
При выводе лопастей из реверса происходит обратное действие: пружина 17 от действия РУД уменьшает усилие затяжки, давление рабочей жидкости в полости 29 падает и управляющий золотник 23 под действием усилия сжатой пружины 33 вместе с плунжером 32 перемещаются вправо. В результате, в полости МШ 13 давление падает, а в полости БШ растет, что заставляет поршень 7 с траверсой 9 поворачивать лопасти на увеличение шага.
Надежность удержания шага лопастей воздушного винта в полете на упоре промежуточного угла обеспечивается тем, что максимальное давление, определяемое затяжкой пружины 17 редукционного клапана 16 при положении РУД на полетных режимах, гарантированно меньше необходимой величины давления, которая могла бы, действуя на правый торец управляющего золотника 23, преодолеть усилие предварительно сжатой пружины 33 и передвинуть влево плунжер 32. В случае же отказов системы управления, приводящих к бесконтрольному увеличению регулируемого давления рабочей жидкости в управляющем канале 5 и полости малого шага 13, винт фиксируется в положении лопастей на промежуточном упоре, т. к. указанное давление не может превзойти пороговую величину давления для преодоления упора 32.
Флюгирование винта осуществляется путем принудительного перемещения золотника флюгирования 21 летчиком в результате перевода в кабине рычага рода работ 41 в положение "флюгер". Одновременно с переводом рычага 41 в положение "флюгер" производится поворот стоп-крана и выключение подачи топлива в двигатель.
При срабатывании золотника флюгирования канал 5 подвода рабочей жидкости к винту отсоединяется от регулируемого давления рабочей жидкости и соединяется со сливом. Лопасти устанавливаются во флюгерное положение под действием усилий, развиваемых противовесами на комлях лопастей 3 и пружиной 14.
Вывод лопастей из флюгера производится включением электроприводного флюгерного насоса 22. При неработающем двигателе и отсутствии поступления в регулятор 4 рабочей жидкости из магистрали двигателя включение флюгерного насоса запитывает систему управления воздушным винтом на период запуска рабочей жидкостью с давлением. При этом закрытый клапан 19 и редукционный клапан 16 обеспечивают в системе необходимое давление рабочей жидкости. Так как в начальный момент запуска частота вращения привода регулятора равна нулю или значительно ниже равновесного значения, то золотник тахометра 18 находится в нижнем положении и рабочая жидкость поступает по каналу 5 в полость 13 малого шага. Под действием давления в полости малого шага лопасти принудительно переводятся на малый шаг и раскручивают воздушный винт от набегающего потока воздуха.
Промышленная применимость заявляемой системы управления флюгерно-реверсивным воздушным винтом подтверждается тем, что основные элементы системы (конструкция гидромеханизма изменения угла установки лопастей, одноканальное управление винтом, конструкция управляющей части регулятора шага) реализованы в аналогичных системах управления отечественных и зарубежных воздушных винтов для самолетов местных авиалиний, а технический результат, получаемый при осуществлении данного изобретения, выгодно отличает заявляемую систему управления от известных аналогов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ РЕВЕРСИВНЫМ ВИНТОВЕНТИЛЯТОРОМ | 1996 |
|
RU2101212C1 |
| СООСНЫЙ ВОЗДУШНЫЙ ВИНТ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 1996 |
|
RU2099243C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ВИНТОМ ИЗМЕНЯЕМОГО ШАГА С ОБРАТНОЙ СВЯЗЬЮ | 1996 |
|
RU2108268C1 |
| ВОЗДУШНЫЙ ВИНТ ИЗМЕНЯЕМОГО ШАГА И СПОСОБ ИЗМЕРЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЕГО ЛОПАСТЕЙ | 1996 |
|
RU2099242C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВОЗДУШНЫМ ВИНТОМ | 1971 |
|
SU292852A1 |
| СИСТЕМА ФЛЮГИРОВАНИЯ ВОЗДУШНОГО ВИНТА ИЗМЕНЯЕМОГО ШАГА | 1991 |
|
RU2030327C1 |
| Автоматический воздушный винт с изменяемым в полете шагом | 1959 |
|
SU132077A1 |
| СПОСОБ ПОЛУЧЕНИЯ МЕТАЛЛОПОЛИМЕРНОГО КОНСТРУКЦИОННОГО МАТЕРИАЛА | 1997 |
|
RU2121012C1 |
| СИСТЕМА ФЛЮГИРОВАНИЯ ВОЗДУШНОГО ВИНТА ИЗМЕНЯЕМОГО ШАГА | 1988 |
|
SU1527804A2 |
| СПОСОБ СИНТЕЗА СВЕРХТВЕРДОГО МАТЕРИАЛА И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2107539C1 |
Использование: изобретение относится к авиационной технике. Сущность: система управления флюгерно-реверсивным воздушным винтом содержит гидромеханизм изменения угла установки лопасти. Упор промежуточного угла выполнен в виде подпружиненного плунжера. Управляющий золотник винта размещен в поршне с возможностью ограниченного осевого перемещения и взаимодействия с плунжером 6. з. п. ф-лы, 1 ил.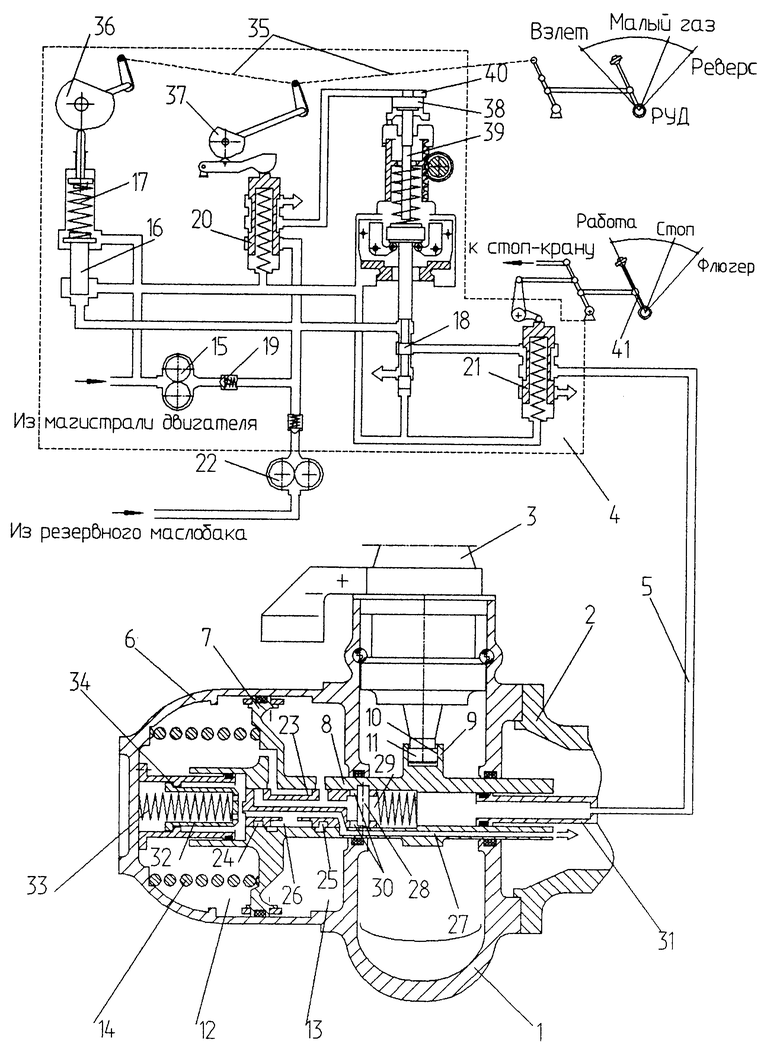
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 4863347, кл | |||
| Приспособление для автоматического тартания | 1922 |
|
SU416A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| EP, патент, 0311277, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US, патент, 4097189, кл | |||
| Приспособление для автоматического тартания | 1922 |
|
SU416A1 |
