Изобретение относится к способам управления маршрутизированным транспортом и может быть использовано в автоматизированных системах диспетчерского управления городским пассажирским транспортом.
Известен способ регулирования временных интервалов движения подвижных единиц на транспортной магистрали, основанный на формировании заданных интервалов следования подвижных единиц на изолированных маршрутах. Однако такой способ не позволяет получить равномерный интервал следования подвижных единиц на участке транспортной сети, общем для нескольких маршрутов, так как движение подвижных единиц регулируется на каждом из изолированных маршрутов независимо от других маршрутов (авторское свидетельство СССР N 423159, G 08 G 1/12, опубл. 05.04.74, БИ N 13).
Известен способ регулирования движения подвижных единиц, основанный на формировании заданных интервалов следования подвижных единиц на изолированных маршрутах, при котором определяют средний временной интервал между подвижными единицами на основании фактических интервалов движения подвижных единиц, вычисляют абсолютные величины отклонений фактических интервалов следования подвижных единиц от полученного среднего, формируют пространственный относительный сдвиг последовательностей временных интервалов следования подвижных единиц на участке, общем для изолированных маршрутов, и формируют плановое время отправления подвижных единиц с конечных контрольных пунктов изолированных маршрутов (авторское свидетельство СССР N 746680, кл. G 08 G 1/01, опубл. 07.07.80, БИ N 25).
Более высокой точностью при регулировании движения подвижных единиц, движущихся с произвольными интервалами, обладает способ регулирования движения подвижных единиц, при котором на контрольных пунктах регистрируют моменты прибытия подвижных единиц, это время сравнивают с плановым временем прибытия и вычисляют отклонение фактического времени от планового, вычисляют новые плановые моменты времени прибытия подвижных единиц на контрольные пункты из условия минимума дополнительных суммарных эксплуатационных расходов и передают эту информацию водителю для изменения скорости движения пропорционально изменению планового времени прибытия на контрольные пункты (авторское свидетельство СССР N 1571637, кл. G 08 G 1/01, опубл. 15.06.90, БИ N 22).
Известен способ регулирования движения, реализованный с помощью приемопередающего блока для системы управления подвижными объектами. В зоне остановки под дорожным покрытием устанавливают соединенную с устройством антенну индуктивной связи. С устройством через двухпроводную линию связи соединяют районный диспетчерский пункт. На подвижной единице устанавливают постоянно работающий передатчик, снабженный кнопкой вызова диспетчера, микрофоном и антенной индуктивной связи, а также постоянно работающий приемник с громкоговорителем и антенной индуктивной связи. Данный способ позволяет диспетчеру автоматически определять наличие подвижных единиц на остановках, оборудованных устройством, и вызывать на речевую связь водителей, находящихся на этих остановках; водителю, транспортное средство которого не оборудовано аппаратурой или аппаратура которого неисправна, получить связь для разговора с диспетчером на остановке, оборудованной устройством; водителю подвижной единицы через диспетчера получить связь с городскими аварийными службами. Недостатки предложенного способа заключаются в необходимости точного останова над установленной под дорожным покрытием антенной индуктивной связи, низком качестве каналов связи, использующих проводные линии, их низкой пропускной способности и частой повреждаемости при земляных работах (авторское свидетельство СССР N 450219, кл. G 08 C 19/12, G 08 G 1/00, опубл. 15.11.74, БИ N 42).
Известен способ, реализованный в устройстве для сбора и передачи информации о движении автобусов, заключающийся в том, что с контрольного пункта (КП) производят периодический опрос по радиолинии автобусов, останавливающихся в зоне действия КП. При остановке автобуса в зоне действия КП формируют и передают на КП код автобуса. При получении запроса, переданного по радиоканалу с контрольного пункта, с помощью аппаратуры автобуса формируют и передают информацию по радиоканалу о номере маршрута и номере наряда в маршруте в виде повторяемого позиционного троичного корректирующего кода с частотно-импульсной и амплитудной модуляцией. Аппаратурой КП принимают этот код, преобразуют его в троичный повторяемый позиционный корректирующий код с полярным признаком и ретранслируют этот код по проводному каналу на линейный диспетчерский пункт (ЛДП). На ЛДП этот код принимают блоком приема и декодирования кодовых комбинаций, производят автоматический контроль регулярности движения автобусов, основанный на сравнении времени прохождения КП с графиком движения, задаваемым диспетчером до выхода автобуса в рейс программному автомату, документальную регистрацию результатов контроля по окончании оборота, сбор и передачу на центральный диспетчерский пункт (ЦДП) по проводной линии связи данных о работе маршрутов, закрепленных за данным ЛДП, а именно: количество действующих на маршруте нарядов, количество автобусов, находящихся в простоях, возвратах, переключениях и заказах, сигнал о возникновении длительного нарушения регулярности движения автобусов по маршруту. Аппаратурой ЦДП принимают информацию с линейных диспетчерских пунктов, отображают ее в цифровом виде на диспетчерском щите и при необходимости вводят в ЭВМ. Однако при этом способе используют проводные линии связи между линейными и центральным диспетчерскими пунктами (авторское свидетельство СССР N 235425, кл. G 08 C 19/28, опубл. 16.01.69, БИ N 5).
Наиболее близким по технической сущности, принятым в качестве прототипа, является способ регулирования движения транспортных единиц, при котором каждой подвижной единице, каждому контрольному пункту и каждому маршруту присваивается определенный номер. Перед началом смены информацию о времени окончания смены, заданных интервалах движения транспортных единиц между двумя последовательными контрольными пунктами всех маршрутов следования в виде временных уставок (максимальных и минимальных), а также справочники каждой транспортной единицы, содержащие помимо другой информации ее номер и маршрут следования, признак первой отметки на контрольном пункте (на начало смены равный 0), заносят в вычислитель. Определяют минимальную и максимальную временные уставки движения транспортных единиц между двумя последовательными контрольными пунктами маршрута соответственно как разность и сумму между нормативным временем движения и допустимым отклонением этого времени. В справочник транспортной единицы в реальном масштабе времени заносят номер контрольного пункта, пройденного транспортной единицей последним, и время его прохождения. При первом опознавании подвижной единицы на любом контрольном пункте изменяют признак первой отметки, фиксируют номер и направление движения транспортной единицы. Полученную информацию передают в вычислитель, где на основании последнего пройденного данной подвижной единицей контрольного пункта и ее направления движения определяют номер контрольного пункта, на котором произошло опознавание, и соответствующие временные уставки. При выходе разницы текущего времени и времени опознавания, зафиксированного таймером вычислителя, за границы, определенные уставками, вычислителем рассчитывают величину изменения скорости движения транспортной единицы, при движении с которой транспортная единица до следующего контрольного пункта компенсирует отклонение от заданного времени движения и которую индицируют водителю транспортной единицы блоком отображения. Перед каждым переходом на ожидание сигнала проезда контрольного пункта производят проверку окончания смены, и в случае превышения текущего времени над временем окончания смены алгоритм заканчивает работу. В случае значительного превышения разностью текущего времени и времени опознавания подвижной единицы верхней временной уставки посредством блока отображения диспетчеру индицируют номер транспортной единицы, маршрут следования, номер последнего пройденного контрольного пункта, что позволяет определить участок аварийной остановки транспортной единицы. Таким образом, данный способ по сравнению с предыдущим является более информативным (авторское свидетельство СССР N 1672505, кл. G 08 G 1/123, опубл. 23.08.91, БИ N 31).
Задача, положенная в основу предлагаемого способа, заключается в расширении функциональных возможностей за счет введения новых операций, повышении качества управления благодаря оперативной речевой связи водителей и диспетчера за счет передачи речи в цифровой форме с временным уплотнением и помехозащищенным кодированием по независимому от телеметрического радиоканалу так, что за один период дискретизации речевого сигнала передают и принимают информационные посылки как в прямом направлении от центрального диспетчерского пункта (ЦДП) к контрольному пункту (КП) и далее от КП к подвижной единице (ПЕ), так и в обратном - от ПЕ к КП и далее от КП к ЦДП, и сокращении времени, необходимого для оказания помощи пассажирам и водителю при возникновении нештатных ситуаций (например, авария или нападение на водителя) за счет кратковременного повышения мощности передатчика ПЕ для устойчивого приема на ЦДП сигналов об аварии или нападении как при нахождении подвижной единицы в зоне действия контрольного пункта (на расстоянии до 100 м от него), так и в любой точке маршрута, а также вне его.
Поставленная задача решается следующим образом. При реализации способа управления движением наземного транспорта каждому контрольному пункту, каждой подвижной единице, каждому маршруту присваивают определенный номер, для каждой подвижной единицы задают график движения, фиксируют время прохождения контрольных пунктов и сравнивают его с заданным, согласно предлагаемому способу с центрального диспетчерского пункта в автоматическом режиме производят циклический опрос контрольных пунктов, которые циклически опрашивают находящиеся в их зоне действия подвижные единицы, принимают пришедшую от подвижных единиц информацию и ретранслируют ее на центральный диспетчерский пункт, где информацию принимают, производят ее обработку, хранение, отображение и корректировку графиков движения на основе анализа статистических данных, индицируют водителю величину отклонения фактического времени прибытия на консольный пункт от планового; нахождение подвижной единицы в зоне действия контрольного пункта, вызов от диспетчера на речевую связь, окончание сеанса речевой связи и успешный прием информации с подвижной единицы центральным диспетчерским пунктом, с подвижной единицы, находящейся в зоне действия контрольного пункта вызывают на речевую связь диспетчера, а при возникновении аварийной ситуации или нападении на водителя принимают на центральном диспетчерском пункте многократно переданный с подвижной единицы соответствующий сигнал из любой точки маршрута, а также вне его при помощи кратковременного повышения мощности передатчика подвижной единицы в режиме диспетчерского управления, осуществляемом параллельно и независимо с автоматическим благодаря тому, что телеметрическую и речевую информацию передают по независимым радиоканалам в цифровой форме с временным уплотнением и помехозащищенным кодированием так, что за один период дискретизации речевого сигнала передают и принимают информационные посылки как в прямом, так и в обратном направлениях, с центрального диспетчерского пункта вызывают водителя любой подвижной единицы либо водителей, находящихся в зоне контрольного пункта с заданным диспетчером номером, либо водителей маршрута с заданным номером, либо - при циркулярном вызове - всех водителей на речевую связь для оперативного изменения графика движения, маршрута или количества машин на маршруте, по запросу оператора отображают данные по любой подвижной единице, по подвижным единицам выбранного маршрута или контрольного пункта либо обо всех подвижных единицах за отчетный период (смена, сутки, месяц, год и т.д.).
Новый технический результат заключается в том, что при обмене информацией между подвижной единицей и центральным диспетчерским пунктом через контрольный пункт, работающий как активный ретранслятор с накоплением информации, признаки наличия или отсутствия аварии или нападения, вызова диспетчера водителем и водителя диспетчером на речевую связь, окончания сеанса речевой связи, успешного приема информации с ПЕ центральным диспетчерским пунктом, а также телеметрическую информацию о параметрах движения подвижной единицы (например, ее номер, номер маршрута, номер наряда в маршруте, номер последнего пройденного контрольного пункта и не менее двух номеров предыдущих контрольных пунктов для определения направления движения), ее техническом состоянии (например, загрузка, средний расход топлива, средняя скорость движения по участкам, максимальная скорость, возникшие неисправности и т.д. и речь передают по независимым радиоканалам в цифровой форме с временным уплотнением и помехозащищенным кодированием так, что за один период дискретизации речевого сигнала информационные посылки передают сначала в прямом направлении от ЦДП к КП и далее от КП к УПЕ, затем - после паузы - в обратном направлении от УПЕ к КП и далее от КП к ЦДП. Это позволяет вести переговоры между водителем и диспетчером, не прерывая передачи телеметрической информации, что исключает ее потери и повышает оперативность диспетчерского управления. Кроме того, при возникновении нештатных ситуаций (например, авария или нападение на водителя) кратковременное повышение мощности передатчика подвижной единицы позволяет устойчиво принимать на ЦДП сигнал аварии или сигнал о нападении как при нахождении подвижной единицы в зоне действия контрольного пункта, так и в любой точке маршрута, что позволяет значительно сократить время, необходимое для оказания помощи пассажирам и водителю.
Таким образом, предлагаемый способ по сравнению с прототипом позволяет расширить функциональные возможности за счет введения новых операций и повысить качество управления благодаря оперативной речевой связи водителей и диспетчера за счет передачи речи в цифровой форме с временным уплотнением и помехозащищенным кодированием по независимому от телеметрического радиоканалу так, что за один период дискретизации речевого сигнала передают и принимают информационные посылки как в прямом направлении от ЦДП к КП и далее от КП к УПЕ, так и в обратном - от УПЕ к КП и далее от КП к ЦДП, а также значительно сократить время, необходимое для оказания помощи пассажирам и водителю при возникновении нештатных ситуаций (например, при аварии или нападении на водителя) за счет кратковременного повышения мощности передатчика подвижной единицы для устойчивого приема на ЦДП сигнала об аварии или о нападении как при нахождении подвижной единицы в зоне действия контрольного пункта, так и в любой точке маршрута, а также вне его.
Анализ известных технических решений позволяет сделать вывод о том, что заявляемое техническое решение не известно из уровня техники, что свидетельствует о его соответствии критерию "новизна".
Сущность изобретения для специалиста не следует явным образом из уровня техники, что позволяет сделать вывод о его соответствии критерию "изобретательский уровень".
Возможность использования предложенного способа в системе диспетчерского управления городским транспортом позволяет сделать вывод о его соответствии критерию "промышленная применимость".
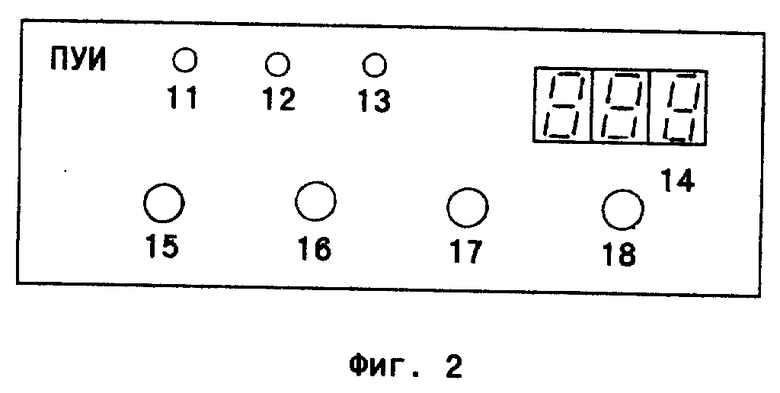
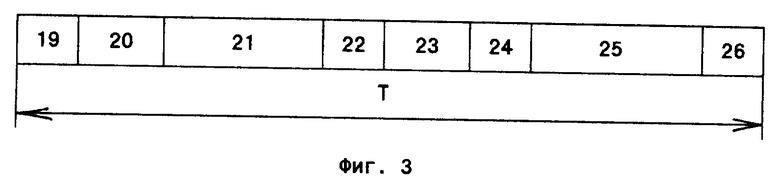
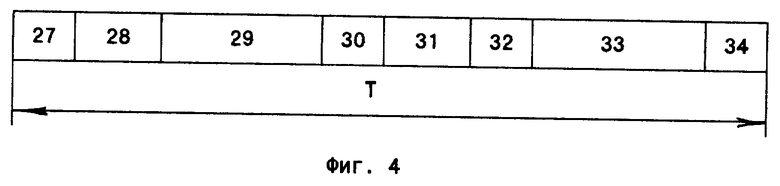
На фиг. 1 изображена структурная схема системы диспетчерского управления наземным транспортом; на фиг. 2 - возможный вариант оформления панели пульта управления и индикации УПЕ; на фиг. 3 - пример структурной организации информационной посылки; на фиг. 4 - пример организации канала передачи информации в прямом (от ЦДП к КП и далее от КП к УПЕ) и обратном (от УПЕ к КП и далее от КП к ЦДП) направлениях.
Предлагаемый способ реализуют с помощью системы диспетчерского управления наземным транспортом (см. фиг. 1), включающей в себя устройства подвижных единиц (УПЕ), содержащие каналообразующую аппаратуру) ближнего радиоканала, контроллер 2 УПЕ и пульт 3 управления и индикации, устройства контрольных пунктов, содержащие каналообразующую аппаратуру ближнего 4 и дальнего 5 радиоканалов и контроллера 6 КП, и устройства центрального диспетчерского пункта (ЦДП), содержащие каналообразующую аппаратуру 7 дальнего радиоканала, файл-сервер 8, автоматизированные рабочие места диспетчеров (АРМД) 9(1)... 9(n) и вспомогательного персонала 10(1)...10(k). Каналообразующая аппаратура ближнего или дальнего радиоканалов может включать в себя, например, приемники, передатчики и адаптеры каналов связи.
В качестве адаптера может использоваться, в частности, специализированная вычислительная машина с высокоскоростным последовательным интерфейсом.
На панель пульта управления и индикации УПЕ (см. фиг. 2) выводят, например, индикатор 11 нахождения ПЕ в зоне действия КП, индикатор 12 вызова водителя ПЕ диспетчером ЦДП, индикатор 13 приема сигнала успешного обмена информацией между УПЕ и ЦДП (сигнал квитирования), индикатор 14 времени отклонения от графика, а также органы ввода дискретной информации, например кнопку 15 сигнализации о нападении, кнопку 16 сигнализации об аварии, кнопку 17 вызова диспетчера на речевую связь и кнопку 18 окончания сеанса речевой связи ("отбой").
При включении аппаратуры центрального диспетчерского пункта с автоматизированных рабочих мест вспомогательного персонала 10(1)... 10(k) производят первичную установку параметров системы : каждому контрольному пункту, каждой подвижной единице, каждому маршруту присваивают определенный номер, для каждой подвижной единицы задают график движения (время прохождения каждого контрольного пункта маршрута).
Центральный диспетчерский пункт (ЦДП) работает параллельно и независимо в двух режимах : автоматическом и диспетчерского управления.
В автоматическом режиме с ЦДП непрерывно производят циклический опрос всех контрольных пунктов (КП), которые циклически опрашивают находящиеся в их зоне действия подвижные единицы (ПЕ), прием телеметрической информации о параметрах движения по маршрутам подвижных единиц и их техническом состоянии, о наличии или отсутствии аварии или нападения, вызова диспетчера водителем ПЕ на речевую связь, окончания сеанса речевой связи, а также обработку, хранение, отображение полученной информации и корректировку графиков движения на основе анализа статистических данных.
Каждый контрольный пункт является активным ретранслятором с накоплением информации. С контрольного пункта непрерывно производят циклическое сканирование зоны контроля и поочередный опрос всех ПЕ, находящихся в его зоне контроля. Аппаратура 1 ближнего радиоканала УПЕ включена на прием и передает информацию только после получения сигнала с ЦДП, переданного через контрольный пункт в автоматическом режиме. При совпадении кода ПЕ, находящейся в зоне контроля КП (о чем свидетельствует включенное состояние индикатора 11 нахождения ПЕ в зоне КП на панели пульта 3 управления и индикации УПЕ), с кодом запроса при помощи передатчика аппаратуры 1 ближнего радиоканала УПЕ передают на КП телеметрическую информацию о параметрах движения ПЕ (например, номер ПЕ, номер маршрута, номер наряда в маршруте, номер пройденного последним контрольного пункта и не менее двух номеров предыдущих контрольных пунктов для определения направления движения), техническом состоянии ПЕ (например, загрузка, средний расход топлива, средняя скорость движения по участкам, максимальная скорость, возникшие неисправности и т.д.), а также признаки наличия или отсутствия аварии или нападения, вызова диспетчера водителем ПЕ на речевую связь, сигнала окончания сеанса речевой связи. Приемником аппаратуры 4 ближнего радиоканала КП принимают информацию с УПЕ, контроллером 6 кодируют индивидуальным для данного КП кодом и при помощи передатчика 5 дальнего радиоканала КП передают эту информацию на ЦДП.
Приемником аппаратуры 7 дальнего радиоканала ЦДП принимают информационную посылку, при помощи файл-сервера 8 обрабатывают полученную информацию, вычисляют отклонение фактического времени прибытия ПЕ на КП от планового и передатчиком аппаратуры 7 посылают на ПЕ через КП сигнал об успешном приеме информации и величину отклонения от графика. Контроллером 2 УПЕ обрабатывают принятую информацию и на панели пульта 3 управления и индикации УПЕ индикатором 14 высвечивают водителю величину отклонения фактического времени прибытия на КП от планового, а индикатором 13 сигнализируют об успешном приеме информации центральным диспетчерским пунктом.
После этого опрос зоны контроля КП продолжают в порядке возрастания номеров ПЕ. Если в зоне КП находится несколько ПЕ, то опрос ПЕ осуществляют в порядке возрастания их номеров. Поскольку ответные сообщения формируют только после получения запроса по своему номеру, исключается возможность одновременного излучения сигналов с нескольких ПЕ, и тем самым исключается возможность сбоев, вызванных наложением информации.
Аппаратура ближнего радиоканала имеет радиус действия около 100 м. Это позволяет использовать передатчики малой мощности, что снижает себестоимость системы и обеспечивает соблюдение санитарных норм на радиоизлучения. Кроме того, увеличение радиуса действия передатчиков, а следовательно, и зоны контроля КП привело бы к снижению точности определения местоположения ПЕ. Указанная величина зоны контроля достаточна для нахождения в ней нескольких ПЕ одновременно, не требует точной остановки в определенной точке и точной ориентации ПЕ.
Информационные посылки передают помехозащищенным кодом с обнаружением и исправлением ошибок, например кодом Рида-Соломона, что позволяет существенно повысить помехозащищенность передаваемой информации. После успешного приема информации посылают в ответном сообщении сигнал квитирования. При отсутствии сигнала квитирования посылают повторный запрос. При длительном отсутствии сигнала квитирования делают вывод о неисправности аппаратуры КП или УПЕ, о чем сигнализируют диспетчеру для принятия мер по устранению нарушений работы системы.
В режиме диспетчерского управления, осуществляемом параллельно и независимо с автоматическим, с ЦДП вызывают на речевую связь водителя любой ПЕ, либо водителей заданного маршрута, либо водителей, находящихся в зоне действия заданного КП, либо - при циркулярном вызове - всех водителей для оперативного изменения графика движения, маршрута, количества машин на маршруте в зависимости от изменения пассажиропотока (например, при проведении массовых мероприятий), при изменении погодных условий (например, уменьшение скорости при гололеде, дожде и т.п.), дорожной ситуации (например, ремонт дороги, дорожно-транспортное происшествие и т.п.); выводят промежуточные данные по любой ПЕ, обо всех ПЕ за отчетный период (смену, сутки и т.д.) в удобной для диспетчера форме (например, в форме таблицы или мнемосхемы на экране терминала или отпечатанной на принтере).
Окончательным документом является ведомость по заработной плате и отчетные ведомости по расходу горючего, пробеге ПЕ и т.д., которые предоставляют для отчета вышестоящим организациям.
При вызове диспетчером с АРМД 9(1)... 9(n) водителя ПЕ на речевую связь включается индикатор 12 вызова на панели пульта 3 управления и индикации УПЕ. После получения сигнала вызова на речевую связь водитель ПЕ, находящейся в зоне действия КП (о чем свидетельствует включенное состояние индикатора 11 нахождения ПЕ в зоне КП), разговаривает с диспетчером. После окончания разговора водитель ПЕ или диспетчер посылает сигнал окончания сеанса связи ("отбой").
Если водителю необходима связь с диспетчером, то, находясь в зоне действия какого-либо КП, водитель нажимает на панели пульта 3 управления и индикации кнопку 17 и после получения разрешения диспетчера на речевую связь разговаривает с диспетчером. По окончании сеанса связи водитель нажимает кнопку 18.
При циркулярном вызове диспетчер вызывает на связь водителей всех ПЕ. Те ПЕ, которые находятся в зоне действия какого-либо КП, воспринимают это сообщение. Одновременно с передачей речевого сообщения его записывают в цифровом виде в память файл-сервера 8. Когда на КП прибывает ПЕ, отсутствовавшая там в момент передачи циркулярного сообщения, при помощи аппаратуры КП передают на ЦДП информацию о прибытии данной ПЕ. Приемником аппаратуры 7 дальнего радиоканала ЦДП принимают информационную посылку, при помощи файл-сервера 8 обрабатывают полученную информацию и вместе с передачей сигнала квитирования и времени отклонения от графика в составе информационной посылки передают водителю вызов на речевую связь от диспетчера, о чем сигнализируют индикатором 12 на панели пульта 3 управления и индикации УПЕ, а затем по речевому каналу передают сообщение диспетчера, извлеченное из памяти файл-сервера 8.
При возникновении нештатных ситуаций (например, нападение на водителя или аварийная ситуация) водитель ПЕ нажимает на панели управления и индикации УПЕ кнопку 15 сигнализации о нападении или кнопку 16 сигнализации об аварии, и его вызов через КП, в зоне действия которого он находится, ретранслируется на ЦДП. Сигнал передают многократно для того, чтобы он мог быть принят с большей вероятностью. Для устойчивого приема из любой точки маршрута (даже вне зоны действия КП), а также вне его сигналов об аварийной ситуации или нападении на водителя предусмотрено кратковременное повышение мощности передатчика.
Обмен информацией между УПЕ и КП, между КП и ЦДП, между ЦДП и УПЕ ведут по двум независимым радиоканалам : по одному передают телеметрическую информацию и признаки нахождения ПЕ в зоне действия КП, вызова водителя диспетчером на речевую связь, окончания сеанса речевой связи и успешного приема информации с подвижной единицы центральным диспетчерским пунктом в прямом и обратном направлениях, по другому - речь, также в прямом и обратном направлениях. Сначала аппаратуру 7 дальнего радиоканала ЦДП включают в режим передачи, а аппаратуру 5 дальнего радиоканала КП - в режим приема, информацию передают от ЦДП к КП, затем переключают аппаратуру 5 ближнего радиоканала КП на передачу, а аппаратуру 7 дальнего радиоканала - на прием и через время паузы передают ответное сообщение от КП к ЦДП. Аналогично производят обмен информацией между КП и УПЕ. Все сигналы, в том числе и речевые, передают в цифровой форме помехозащищенным кодом с временным уплотнением старт-стопными посылками с частотой повторения, равной частоте дискретизации речевого сигнала. По речевому каналу (см. фиг. 3) : сначала в прямом направлении от ЦДП к КП и далее от КП к УПЕ следуют стартовая посылка 19, адрес речевой посылки 20, речь 21, стоповая посылка 22, и после паузы 23 в обратном направлении от УПЕ к КП и далее от КП к ЦДП стартовая посылка 24, речь 25 и стоповая посылка 26. Аналогично по телеметрическому каналу (см. фиг. 4): в прямом направлении - стартовая посылка 27, адрес телеметрической посылки 28, собственно телеметрическая посылка 29, стоповая посылка 30 и после паузы 31 в обратном направлении - стартовая посылка 32, телеметрическая информация 33, стоповая посылка 34.
Длительность посылок по речевому и телеметрическому каналам одинакова и равна T (см. фиг. 3 и 4) - периоду дискретизации речевого сигнала.
В составе телеметрической посылки от УПЕ к ЦДП передают информацию о параметрах движения ПЕ по маршрутам (например, номер ПЕ, номер маршрута, номер наряда в маршруте, номер пройденного последним и двух предыдущих номеров контрольных пунктов для определения направления движения), техническом состоянии ПЕ (например, загрузка, расход топлива, средняя и максимальная скорость движения по маршруту, возникшие неисправности), признаки наличия или отсутствия ("0" или "1") аварии, нападения, вызова диспетчера на речевую связь и окончания сеанса речевой связи, В составе телеметрической посылки от ЦДП к УПЕ передают, например, время отклонения от графика движения, признак вызова водителя диспетчером на речевую связь и сигнал квитирования - успешного приема информации с ПЕ центральным диспетчерским пунктом.
Таким образом, положительный эффект предлагаемого способа заключается в расширении функциональных возможностей за счет введения новых операций и повышении качества управления благодаря оперативной речевой связи водителей и диспетчера за счет передачи речи в цифровой форме с временным уплотнением и помехозащищенным кодированием по независимому от телеметрического каналу так, что за один период дискретизации речевого сигнала передают и принимают информационные посылки как в прямом направлении от ЦДП к КП и далее от КП к УПЕ, так и в обратном - от УПЕ к КП и далее от КП к ЦДП. Кроме того, при возникновении нештатных ситуаций (например, авария или нападение на водителя) кратковременное повышение мощности передатчика подвижной единицы позволяет принимать на ЦДП сигнал аварии или сигнал о нападении при предлагаемом способе - это два различных сигнала) как при нахождении подвижной единицы в зоне действия контрольного пункта, так и в любой точке маршрута, а также вне его, что позволяет значительно сократить время, необходимое для оказания помощи пассажирам и водителю.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2113012C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2108626C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2011 |
|
RU2463665C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ МАРШРУТИЗИРОВАННЫМ ТРАНСПОРТОМ | 2005 |
|
RU2305326C2 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2005 |
|
RU2303293C2 |
| АВТОМАТИЗИРОВАННАЯ ДИСПЕТЧЕРСКАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ДОРОЖНЫМ ТРАНСПОРТОМ | 2005 |
|
RU2300808C2 |
| Устройство для контроля движения транспортных средств | 1989 |
|
SU1695352A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2431200C1 |
Изобретение относится к способам управления городским маршрутизированным транспортом. При реализации способа управления движением наземного транспорта, основанного на задании для каждой подвижной единицы (ПЕ) ее номера, номера маршрута следования, фиксации времени прохождения контрольных пунктов и сравнении его с заданным, согласно предлагаемому техническому решению с центрального диспетчерского пункта (ЦДП) в автоматическом режиме производят циклический опрос подвижных единиц, находящихся в зоне действия контрольных пунктов (КП), принимают пришедшую от подвижных единиц информацию, производят ее обработку, хранение, отображение и корректировку графиков движения, индицируют водителю величину отклонения фактического времени прибытя на КП от планового, нахождене ПЕ в зоне действия КП, вызов от диспетчера на речевую связь, окончание сеанса речевой связи и успешный прием информации с подвижной единицы центральным диспетчерским пунктом; с ПЕ, находящейся в зоне действия КП, вызывают на речевую связь диспетчера, а при возникновении аварийной ситуации или нападении на водителя принимают на ЦДП многократно переданный с подвижной единицы соответствующий сигнал из любой точки маршрута, а также вне его при помощи кратковременного повышения мощности передатчика подвижной единицы, что позволяет устойчиво принимать указанные сигналы на ЦДП и значительно сократить время, необходимое для оказания помощи пассажирам и водителю. В режиме диспетчерского управления с ЦДП вызывают водителя любой ПЕ на речевую связь для оперативного изменения графика движения, маршрута или количества машин на маршруте, по запросу оператора отображают данные по любой ПЕ. Способ позволяет расширить функциональные возможности за счет введения новых операций и повысить качество управления благодаря оперативной речевой связи водителей и диспетчера за счет передачи речи в цифровой форме с временным уплотнением и помехозащищенным кодированием по независимому от телеметрического радиоканалу. 4 ил.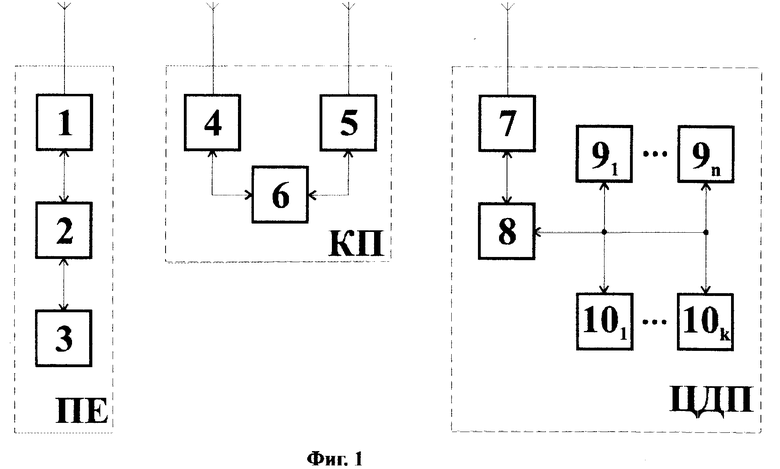
Способ управления движением наземного транспорта, основанный на задании для каждой подвижной единицы ее номера, номера маршрута следования, фиксации времени прохождения контрольных пунктов, сравнения его с заданным, отличающийся тем, что в автоматическом режиме с центрального диспетчерского пункта производят циклический опрос контрольных пунктов, которые, в свою очередь, циклически опрашивают находящиеся в их зоне действия подвижные единицы, принимают прошедшую от подвижных единиц информацию и ретранслируют ее на центральный диспетчерский пункт, где информацию принимают, производят ее обработку, хранение, отображение и корректировку графиков движения на основе анализа статистических данных, индицируют водителю величину отклонения фактического времени прибытия на контрольный пункт от планового, нахождение подвижной единицы в зоне действия контрольного пункта, вызов от диспетчера на речевую связь и успешный прием информации с подвижной единицы центральным диспетчерским пунктом, с подвижной единицы, находящейся в зоне действия контрольного пункта, вызывают на речевую связь диспетчера, а при возникновении аварийной ситуации или нападения на водителя принимают на центральном диспетчерском пункте многократно переданный с подвижной единицы соответствующий сигнал из любой точки маршрута, а также вне его, при помощи кратковременного повышения мощности передатчика подвижной единицы, в режиме диспетчерского управления, осуществляемом параллельно и независимо с автоматическим благодаря тому, что телеметрическую и речевую информацию передают по независимым радиоканалам в цифровой форме с временным уплотнением и помехозащищенным кодированием так, что за один период дискретизации речевого сигнала передают и принимают информационные посылки как в прямом, так и в обратном направлениях, с центрального диспетчерского пункта вызывают водителей на речевую связь для оперативного изменения графика движения, маршрута, количества машин на маршруте, по запросу оператора отображают данные о подвижных единицах за отчетный период.
| SU, авторское свидетельство, 1672505, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| SU, авторское свидетельство, 423159, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| SU, авторское свидетельство, 746680, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| SU, авторское свидетельство, 1571637, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| SU, авторское свидетельство, 420219, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| SU, авторское свидетельство, 235425, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |

