Изобретение относится к системам контроля и управления подвижных транспортных средств и может быть использовано, в частности, для контроля и диспетчерского управления движением маршрутизированного транспорта.
Известна телематическая система (патент RU 2173888, В60R 25/10, 20.09.2001), в которой для местоопределения подвижных объектов используется американская глобальная система позиционирования (GPS) "Навстар" или ее российский аналог система "Глонас". Эти системы представляют собой группировку спутников, выведенных на околоземную орбиту, каждый из которых определяет с высокой точностью свое местоположение в пространстве по звездам и каждую секунду в высокоточной системе единого для всех спутников времени передает в эфир свои координаты. Приемник, находящийся на Земле, принимает информацию от спутников и измеряет задержку поступления сигнала. Вычислитель приемника решает задачу по определению местонахождения самого приемника в пространстве. Данная телематическая система содержит сеть терминальных устройств, расположенных на подвижных и/или стационарных объектах, связанных каналами связи с центром диспетчеризации и мониторинга, каждое терминальное устройство содержит объединенные двунаправленной шиной микроконтроллера приемопередатчик GSM с антенной, с подключенными к нему блоками аудио интерфейса, приемопередатчик спутниковой системы связи Орбком с антенной, приемник GPS или "Глонас" с антенной, а центр диспетчеризации и мониторинга содержит сервер сообщений GSM, сервер сообщений Орбком, сервер сообщений службы сервиса SMS и N рабочих станций операторов, объединенных в локальную сеть с помощью главного сервера системы, а также радиомодуль GSM с антенной и радиомодуль Орбком с антенной, подключенные к серверу сообщений GSM и к серверу сообщений Орбком соответственно. Приемник GPS или "Глонас", входящий в терминальное устройство, размещенное на подвижном объекте, принимает сигналы от спутников соответствующей глобальной системы позиционирования и вычисляет 1 раз в секунду координаты объекта. Данные о координатах либо накапливаются в памяти микроконтроллера терминального устройства, либо с переодичностью (1 раз в n секунд) передаются на центр диспетчеризации и мониторинга через приемопередатчик GSM или, при отсутствии связи по этому каналу (например, при выходе подвижного объекта из зоны обслуживания GSM), через приемопередатчик спутниковой системы связи Орбком, переключение на который производится в этом случае автоматически по соответствующим командам микроконтроллера. Таким образом, связь терминального устройства, размещенного на подвижном объекте, с центром диспетчеризации и мониторинга не нарушается (обеспечивается) в любой точке земного шара.
Использование данной телематической системы в качестве системы диспетчерского управления маршрутизированным транспортом позволяет определять координаты каждой подвижной единицы (ПЕ) с высокой точностью через каждые n секунд, т.е. следить (контролировать и управлять) за траекторией движения каждой ПЕ в реальном времени. Но данная система сложна и оборудование, используемое для ее реализации, имеет высокую стоимость. Диспетчерской службе транспортных предприятий (особенно имеющих электротранспорт) для контроля соблюдения графиков движения ПЕ (включая автоматизированный контроль) достаточно определять реальное время прибытия каждой ПЕ в контрольные точки маршрута.
Известна также система диспетчерского управления наземным транспортом (патент РФ №2113014, G08G 1/01), выбранная за прототип, содержащая, центральный диспетчерский пункт (ЦДП) с многоканальным приемопередатчиком, подключенным к адаптеру каналов связи, оснащенному блоком ввода-вывода речи и объединенному в локальную вычислительную сеть с автоматизированными рабочими местами диспетчеров (АРМД) и файл-сервером, контрольные пункты (КП) размещенные в контрольных точках маршрута (КТМ), аппаратура каждого из которых является узлом обмена данными (УОД) между приемопередатчиками, размещенными на подвижных единицах (ПЕ), и многоканальным приемопередатчиком ЦДП, каждый УОД содержит приемопередатчики ближнего и дальнего радиоканалов, соединенные с микроконтроллером, на каждой ПЕ установлен блок управления, к которому подключены приемопередатчик, блок ввода-вывода речи, пульт управления и индикации. Многоканальный приемопередатчик, установленный на ЦДЛ по дальнему радиоканалу связан с приемопередатчиками дальнего действия всех УОД. Приемопередатчик ближнего радиоканала каждого УОД связан с приемопередатчиками, установленными на всех ПЕ. Радиус действия аппаратуры ближнего радиоканала составляет около 100 метров.
В автоматическом режиме приемопередатчик ЦДП под управлением адаптера каналов связи непрерывно производит циклический опрос всех УОД (КП), размещенных в КТМ, прием информации о ПЕ, а включенные в локальную вычислительную сеть файл-сервер и компьютеры АРМД - обработку, хранение и отображение полученной информации.
Приемопередатчик ближнего радиоканала УОД под управлением микроконтроллера непрерывно производит циклическое сканирование зоны контроля и поочередный опрос всех приемопередатчиков, размещенных на ПЕ, находящихся в зоне контроля. При совпадении кода ПЕ, находящейся в зоне контроля УОД, с кодом запроса приемопередатчик, установленный на ПЕ, передает в УОД сообщение содержащее, например номер ПЕ и номер маршрута. Кроме того, в сообщение могут включаться признаки аварии или нападения, вызова диспетчера водителем ПЕ для речевой связи и т.д. Приемопередатчик ближнего радиоканала УОД принимает сообщение от ПЕ, микроконтроллер кодирует его индивидуальным для данного УОД кодом, а приемопередатчик дальнего радиоканала передает это сообщение, в виде информационной посылки, на ЦДП. Приемопередатчик дальнего радиоканала ЦДП принимает информационную посылку, адаптер каналов связи преобразует ее и передает в файл-сервер, который обрабатывает полученную информацию, вычисляет отклонение фактического времени прибытия ПЕ в КТМ от планового, затем информация об отклонении от графика вместе с сигналом об успешном обмене информацией (сигнал квитирования) преобразуется адаптером каналов связи и передается передатчиком дальнего радиоканала на ПЕ через УОД, в результате чего на панели пульта управления и индикации, установленной на ПЕ, высвечивается величина отклонения фактического времени прибытия в КТМ от планового. После этого опрос зоны контроля УОД продолжается в порядке возрастания номеров ПЕ.
Речевой сигнал от ЦДП через УОД на ПЕ и обратно передается в цифровой форме в составе информационных посылок.
При возникновении нештатных ситуаций (например, нападение на водителя или аварийная ситуация) водитель ПЕ нажимает на панели управления и индикации соответствующую кнопку, и его сообщение через УОД, в зоне действия которого он находится, передается на ЦДП. Для устойчивого приема из любой точки маршрута (даже вне зоны действия УОД), а также вне маршрута, сообщения об аварийной ситуации или нападении на водителя предусматривают либо кратковременное повышение мощности передатчика, либо передачу укороченного сообщения с признаками аварии или нападения по дополнительному каналу, характеристики которого обеспечивают надежный прием на УОД этих сообщений для дальнейшей их передачи на ЦДП по дальнему радиоканалу.
В известной системе обмен информацией между ЦДП и УОД (КП), размещенными в КТМ, осуществляют через канал дальней радиосвязи. При большой удаленности КТМ от ЦДП, например, на междугороднем маршруте, требуются мощные приемопередатчики, а это приводит к усложнению и удорожанию системы. Размещение УОД в контрольных точках, маршрута и наладка устойчивой дальней радиосвязи при реализации системы требуют значительного времени, т.к. приемопередатчики дальнего действия (антенны) нужно разместить, по возможности, выше окружающих зданий, а аппаратура ближнего радиоканала УОД должна быть удалена от дороги не более чем на 60-70 метров. Кроме того, для реализации системы необходимо иметь выделенные радиочастоты (дальняя радиосвязь между ЦДП и всеми УОД), что так же приводит к увеличению времени ввода системы в эксплуатацию.
Задача, положенная в основу предлагаемого технического решения, заключается в исключении влияния удаленности контрольных точек маршрута (КТМ) от ЦДП на сложность и стоимость системы диспетчерского управления маршрутизированным транспортом, а также в уменьшении времени, необходимого для реализации системы.
Поставленная задача решается следующим образом. В системе диспетчерского управления маршрутизированным транспортом, содержащей центральный диспетчерский пункт (ЦДЛ) с автоматизированным рабочим местом диспетчера (АРМД), выполненным на базе компьютера, и многоканальным приемопередатчиком, а также узлы обмена данными (УОД) между передатчиками сообщений (ПС) и многоканальным приемопередатчиком центрального диспетчерского пункта, согласно предлагаемому техническому решению на центральном диспетчерском пункте в качестве многоканального приемопередатчика использована абонентская станция (АС), приемо-передающий модуль которой через канал ближней связи соединен с вновь введенным приемо-передающим модулем, подключенным к компьютеру автоматизированного рабочего места диспетчера, упомянутые узлы обмена данными размещены на подвижных единицах (ПЕ), и в качестве каждого из них использована абонентская станция (АС), приемо-передающий модуль которой через беспроводной канал ближней связи соединен с приемо-передающими модулями передатчиков сообщений, передатчики сообщений (ПС) размещены в контрольных точках маршрута (КТМ) и каждый содержит микроконтроллер, к которому подключен приемо-передающий модуль, абонентская станция центрального диспетчерского пункта содержит блок управления, выполненный на микроконтроллере, к которому подключены многоканальный приемопередатчик, блок ввода-вывода речи и приемо-передающий модуль, абонентская станция каждой подвижной единицы содержит блок управления, выполненный на микроконтроллере, к которому подключены многоканальный приемопередатчик, пульт управления, блок ввода-вывода речи, дисплей и приемо-передающий модуль, все абонентские станции системы подключены к сети сотовой связи (ССС).
Целесообразно каждую абонентскую станцию системы реализовать с помощью сотового телефона, обеспечивающего прием/передачу SMS-сообщений, и оснащенного средством для подключения внешних устройств, причем сотовый телефон каждой подвижной единицы оснащен средством для беспроводного подключения, например Bluetooth-модулем или ZigBee-модулем, а сотовый телефон центрального диспетчерского пункта оснащен средством для проводного или беспроводного подключения внешних устройств.
Bluetooth и ZigBee - это технологии беспроводных соединений. Bluetooth-модуль (ZigBee-модуль) представляет собой радиоприемник и радиопередатчик, работающие на частотах 2400-2483.5 МГц. Эти частоты являются открытыми и свободными от лицензирования. Особенностью этих технологий является то, что различные Bluetooth (ZigBee) модули соединяются между собой автоматически, попадая в пределы взаимной досягаемости (до 100 метров). (http)://www.altonika.ru/pdf/Ruk osa-zip,http://www.psis.ru/doc/psis2430).
ССС построена в виде совокупности ячеек (сот), покрывающих обслуживаемую территорию (Дьяконов В.П., Смердов В.Ю. Мобильные телефоны и коммуникаторы. - М.: СОЛОН-Пресс.2003. - с.44). Каждая из сот обслуживается своим многоканальным приемопередатчиком (базовой станцией) с невысокой выходной мощностью. Это обеспечивает повторное использование частот каналов этого приемопередатчика в несмежных сотах. Повторное использование частот позволяет охватывать ССС большие территории вне зависимости от количества каналов связи у многоканальных приемопередатчиков, установленных на базовых станциях. Один из каналов каждой базовой станции (БС) является управляющим (каналом вызова). Все БС соединены с центром коммуникации (ЦК) сотовой сети по выделенным проводным, волоконно-оптическим или радиорелейным каналам связи. ЦК - это центральная автоматическая телефонная станция ССС, обеспечивающая все функции управления сетью. БС служит своеобразным интерфейсом между абонентскими станциями (АС), находящимися в зоне действия многоканального приемопередатчика этой БС, и ЦК. Связь АС с БС осуществляется по радиоканалу. ЦК осуществляет непрерывное слежение за АС, организует их эстафетную передачу, в процессе которой достигается непрерывность связи при перемещении АС из соты в соту, и переключение рабочих каналов в соте при появлении помех или неисправностей. Несколько отдельных ССС, обслуживающих различные территории, могут объединяться в одну общую сеть, что обеспечивает расширение зоны обслуживания сетью сотовой связи.
ССС имеет службы передачи данных, например службу передачи коротких сообщений SMS (Дьяконов В.П., Смердов В.Ю. Мобильные телефоны и коммуникаторы. - М.: СОЛОН-Пресс. 2003. - с.63). Для доставки SMS-сообщений в АС адресата используют управляющий канал, что позволяет доставлять SMS-сообщения в АС адресата во время ее занятости речевой связью. Отличительной особенностью службы SMS является гарантированная доставка сообщения адресату, т.е. если в данный момент времени АС адресата занята приемом или передачей данных, то сообщение будет доставлено после ее освобождения. Это обеспечивает обмен данными между АС, установленной на ЦДП, и АС, установленными на всех ПЕ в качестве УОД, без синхронизации работы АС. Служба SMS содержит центр обработки SMS-сообщений, который выполняет все функции, связанные с получением, промежуточным хранением и контролем за доставкой сообщений в АС.
Размещенные на каждой ПЕ, в качестве узлов обмена данными, абонентские станции, многоканальный приемопередатчик каждой из которых соединен с ее блоком управления и подключен к ССС, а приемо-передающий модуль, подключенный к тому же блоку управления, через беспроводной канал ближней связи соединен с приемо-передающими модулями передатчиков сообщений, размещенных в КТМ, вместе с размещенной на ЦДП абонентской станцией, многоканальный приемопередатчик которой соединен с ее блоком управления и подключен к ССС, а приемо-передающий модуль, подключенный к тому же блоку управления, через канал ближней связи соединен с приемо-передающим модулем, подключенным к компьютеру, входящему в АРМД, обеспечивают обмен сообщениями (данными) между микроконтроллером, входящим в ПС, и компьютером АРМД при нахождении ПЕ в зоне взаимной досягаемости между приемо-передающими модулями ПС и АС ПЕ, а также позволяют передавать сообщения из компьютера АРМД в блок управления АС любой ПЕ при нахождении ПЕ в зоне обслуживаемой ССС.
АС ЦДП, подключенная к ССС, содержащая блок ввода-вывода речи, соединенный с блоком управления, и через приемо-передающий модуль соединенная с компьютером АРМД, вместе с размещенными на ПЕ АС, каждая из которых подключена к ССС и содержит блок ввода-вывода речи, пульт управления и дисплей, соединенные с блоком управления, обеспечивают оперативную речевую связь между диспетчером и водителем любой ПЕ, по инициативе любой стороны, при нахождении ПЕ в зоне обслуживаемой ССС, что особенно важно при возникновении нештатных ситуаций, например при аварии.
Работа системы диспетчерского управления маршрутизированным транспортом в автоматическом режиме осуществляется следующим образом.
Компьютер АРМД в автоматическом режиме следит за соблюдением подвижными единицами графиков движения по маршруту. Контроль осуществляется путем сравнения реального и расчетного времени прибытия ПЕ в контрольные точки маршрута. Информация о расчетном времени прибытия ПЕ в КТМ храниться в памяти компьютера, а о реальном поступает в него с помощью сообщений, отправляемых передатчиками сообщений, размещенными в КТМ, через УОД, размещенные на ПЕ, автоматически, при сближении ПЕ с ПС до нескольких десятков метров.
При отклонении ПЕ от графика движения свыше установленного допуска, компьютер автоматически формирует и передает в блок управления АС, установленной на ПЕ, допустившей отклонение от графика движения, сообщение, содержащее время и знак отклонения, которое отображается на дисплее, подключенном к блоку управления АС. Информирование водителя о поступлении сообщения осуществляется с помощью звукового сигнала, воспроизводимого блоком ввода-вывода речи, подключенным к блоку управления.
Отсутствие сообщения от УОД конкретной ПЕ в расчетное время, с учетом допуска на отклонение от графика движения, расценивается компьютером как отставание ПЕ от графика движения. Компьютер в этом случае, как и сказано выше, автоматически передает сообщение на ПЕ допустившую отклонение от графика движения. Если же сообщение от ПЕ не поступит в течение дополнительного времени (вероятно возникла аварийная ситуация или вышла из строя аппаратура размещенная на ПЕ или в КТМ), то компьютер незамедлительно информирует о сложившейся ситуации диспетчера (сообщение на мониторе и звуковой сигнал). Диспетчер, получив данное сообщение, делает попытку установления речевой связи с водителем ПЕ, используя компьютер и блок ввода-вывода речи, входящий в АС ЦДП. Если же речевую связь установить не удается, то принимает предусмотренные для таких случаев действия.
Для уменьшения количества передаваемых сообщений при эксплуатации системы целесообразно контроль соблюдения графиков движения по маршруту подвижными единицами осуществлять с помощью микроконтроллеров, входящих в ПС, и сообщения от ПС на ПЕ передавать только в случае отклонения ПЕ от графика движения. Графики движения ПЕ, в этом варианте, хранятся в каждом ПС (память микроконтроллера), причем их нужно по мере необходимости обновлять. Обновление графиков движения можно осуществлять несколькими способами, например, устанавливать в ПС память микроконтроллера с новыми данными, записывать в память новые данные путем их передачи по беспроводному каналу ближней связи от мобильного устройства, например от компьютера, оснащенного приемо-передающим модулем, размещенного на каком-то транспортном средстве, или из компьютера АРМД ЦДП через ССС и УОД ПЕ, при нахождении ПЕ в зоне взаимной досягаемости между приемо-передающими модулями ПС и АС ПЕ, или записывать новые данные через порт микроконтроллера ПС.
Кроме того, для уменьшения количества передаваемых через ССС сообщений при эксплуатации системы можно сравнение реального и расчетного времени прибытия каждой ПЕ в КТМ осуществлять с помощью микроконтроллера блока управления АС, размещенной на ПЕ, и передавать сообщения в ЦДП только в случае отклонения ПЕ от графика движения. График движения подвижной единицы, в этом варианте, хранится в АС (память микроконтроллера блока управления), размещенной на этой ПЕ. Обновление графика движения можно осуществлять несколькими способами, например устанавливать в АС память микроконтроллера с новыми данными, записывать в память новые данные путем их передачи по беспроводному каналу ближней связи от компьютера, оснащенного приемо-передающим модулем, передавать новые данные с помощью сообщений из компьютера АРМД ЦДП через ССС или записывать новые данные через порт микроконтроллера блока управления.
Принципиальным в предлагаемой системе является то, что в отличие от прототипа УОД размещены на подвижных единицах, а не в КТМ, и то, что в качестве каждого УОД и в качестве многоканального приемопередатчика ЦДП использованы АС, подключенные к ССС с помощью многоканальных приемопередатчиков с невысокой выходной мощностью. Кроме того, принципиальным в предлагаемой системе является то, что в контрольных точках маршрута размещены передатчики сообщений, соединенные с абонентскими станциями, размещенными на подвижных единицах, беспроводным каналом ближней связи.
Анализ известных технических решений позволяет сделать вывод о том, что заявляемое техническое решение не известно из уровня техники, что свидетельствует о его соответствии критерию «новизна».
Сущность заявляемого изобретения для специалиста не следует явным образом из уровня техники, что позволяет сделать вывод о его соответствии критерию «изобретательский уровень».
Возможность использования заявляемой системы диспетчерского управления маршрутизированным транспортом позволяет сделать вывод о его соответствии критерию "промышленная применимость".
Пример реализации системы диспетчерского управления маршрутизированным транспортом поясняется чертежом.
Система диспетчерского управления маршрутизированным транспортом содержит в контрольных точках маршрута (КТМ) передатчики сообщений (ПС), в каждый из которых входит приемо-передающий модуль 1 и микроконтроллер 2; подвижные единицы (ПЕ), на каждой из которых размещен узел обмена данными (УОД), в качестве которого использована абонентская станция (АС), содержащая приемо-передающий модуль 3, многоканальный приемопередатчик 4, пульт управления 5, блок управления 6, блок ввода-вывода речи 7 и дисплей 8; сеть сотовой связи (ССС); центральный диспетчерский пункт (ЦДП), в котором размещена абонентская станция (АС), содержащая многоканальный приемопередатчик 9, блок управления 10, приемо-передающий модуль 11 и блок ввода-вывода речи 12, в ЦДП так же установлено автоматизированное рабочее место диспетчера (АРМД), содержащее приемо-передающий модуль 13 и компьютер 14.
Каждая АС системы может быть реализована с помощью сотового телефона, обеспечивающего прием/передачу SMS-сообщений и оснащенного средством для подключения внешних устройств, причем сотовый телефон каждой ПЕ должен быть оснащен средством для беспроводного подключения (приемо-передающий модуль 3, подключенный к блоку управления 6), например, Bluetooth-модулем или ZigBee-модулем, а сотовый телефон ЦДП должен быть оснащен средством для проводного или беспроводного подключения (приемо-передающий модуль II, подключенный к блоку управления 10) внешних устройств. Кроме того, сотовый телефон каждой ПЕ должен содержать многоканальный приемопередатчик 4, пульт управления 5, блок ввода-вывода речи 7 и дисплей 8, подключенные к блоку управления 6, а сотовый телефон ЦДП должен содержать многоканальный приемопередатчик 9 и блок ввода-вывода речи 12, подключенные к блоку управления 10.
Приемо-передающий модуль 1, входящий в каждый ПС, реализован с помощью приемо-передающего модуля, использующего ту же технологию соединения, что и технология, используемая в приемо-передающих модулях 3 АС ПЕ.
Приемо-передающий модуль 13, подключенный к компьютеру 14, реализован с помощью приемо-передающего модуля, использующего ту же технологию соединения, что и технология, используемая в приемо-передающем модуле 11 АС ЦДП.
Для реализации системы диспетчерского управления маршрутизированным транспортом осуществляют следующее:
В память блока управления 6 каждой АС, предназначенной для размещения на ПЕ, записывают управляющие программы, обеспечивающие ее работу в качестве узла обмена данными между передатчиками сообщений и АС ЦДП.
В память блока управления 10 АС, предназначенной для размещения на ЦДП, записывают управляющие программы, обеспечивающие ее работу в составе оборудования ЦДП.
Подключают все АС системы к сети сотовой связи.
На ЦДП размещают АС и автоматизированное рабочее место диспетчера (АРМД), содержащее компьютер 14 с приемо-передающим модулем 13.
В память компьютера 14 заносят;
управляющие программы, обеспечивающие работу компьютера 14 в составе АРМД.
данные о подвижных единицах системы, в том числе номера АС, установленных на ПЕ.
идентификационные номера приемо-передающих модулей 1 всех ПС. По этим номерам идентифицируют контрольные точки маршрута.
На каждой ПЕ размещают АС.
Во всех КТМ размещают ПС, записав предварительно в память микроконтроллера 2 каждого ПС, управляющие программы, обеспечивающие работу передатчика, и номер АС ЦДП.
Настраивают канал ближней связи между АС ЦДП и АРМД.
Настраивают беспроводной канал ближней связи между АС каждой ПЕ и всеми ПС.
До начала движения ПЕ по маршруту в память компьютера 14 АРМД заносят данные о расчетном времени прибытия всех ПЕ в контрольные точки маршрута и допуски отклонения ПЕ от графиков движения. В дальнейшем по мере необходимости графики обновляют.
Система диспетчерского управления маршрутизированным транспортом в автоматическом режиме работает следующим образом.
При сближении любой ПЕ с любым ПС до нескольких десятков метров, между приемо-передающим модулем 3 АС, установленной на ПЕ, и приемо-передающим модулем 1, входящим в ПС, автоматически устанавливается канал связи. По этому каналу связи микроконтроллер 2, входящий в ПС, с помощью приемо-передающих модулей 1 и 3, передает в блок управления 6 АС, установленной на ПЕ, сообщение, содержащее идентификационный номер приемо-передающего модуля 1 (номер КТМ) и номер АС ЦДП. Блок управления 6, проведя необходимую обработку полученного сообщения, с помощью многоканального приемопередатчика 4, через ССС, передает сообщение, например SMS-сообщение в АС ЦДП. Служба передачи SMS-сообщений, входящая в ССС, вместе с сообщением передает в АС ЦДП служебную информацию, содержащую время приема SMS-сообщения, т.е. время прибытия ПЕ в КТМ, и номер АС, отправившей это сообщение, по которому идентифицируют ПЕ. Блок управления 10 АС ЦДП, обеспечивает автоматическую передачу поступившего сообщения из многоканального приемопередатчика 9 в приемо-передающий модуль 11. Далее сообщение по проводному или беспроводному каналу связи доставляется в приемо-передающий модуль 13, подключенный к компьютеру 14 АРМД, откуда поступает в компьютер 14. За все время пребывания ПЕ в зоне действия ПС передается одно сообщение.
Компьютер 14 АРМД, получив сообщение, сохраняет в своей памяти полученные данные и осуществляет сравнение реального и расчетного времени прибытия конкретной ПЕ в конкретную КТМ. При отклонении ПЕ от графика движения свыше установленного допуска, компьютер 14 автоматически формирует сообщение, например SMS-сообщение, включающее время и знак отклонения. Сообщение вместе с номером АС, установленной на ПЕ допустившей отклонение от графика движения, автоматически, через приемо-передающий модуль 13, по проводному или беспроводному каналу связи, через приемо-передающий модуль 11, входящий в АС ЦДП, передается в блок управления 10. Поступившее в микроконтроллер блока управления 10 сообщение автоматически, под управлением этого микроконтроллера, с помощью многоканального приемопередатчика 9, через ССС передается в многоканальный приемопередатчик 4 АС, установленной на ПЕ, допустившей отклонение от графика движения, и далее в блок управления 6. Поступившее SMS-сообщение отображается на дисплее 8, подключенном к блоку управления 6. Информирование водителя о поступлении SMS-сообщения осуществляется с помощью звукового сигнала, воспроизводимого блоком ввода-вывода речи 7, подключенным к блоку управления 6.
Отсутствие сообщения от конкретного ПС, переданного через АС конкретной ПЕ в расчетное время с учетом допуска на отклонение от графика движения, расценивается компьютером 14 как отставание ПЕ от графика движения. Компьютер 14 в этом случае, как и описано выше, автоматически передает сообщение на ПЕ, допустившую отклонение от графика движения. Если же сообщение от ПЕ не поступит в течение дополнительного времени (вероятно возникла аварийная ситуация или вышла из строя аппаратура, размещенная на ПЕ или в КТМ), то компьютер 14 незамедлительно информирует о сложившейся ситуации диспетчера (сообщение на мониторе и звуковой сигнал). Диспетчер, получив данное сообщение, делает попытку установления речевой связи с водителем ПЕ и, если это не удается, то принимает предусмотренные для таких случаев действия.
Для установления речевой связи с водителем любой ПЕ диспетчер использует клавиатуру и монитор компьютера 14, через приемо-передающий модуль 13 соединенного с АС ЦДП.
Для установления речевой связи с диспетчером водитель любой ПЕ использует пульт управления 5 и дисплей 8, подключенные к блоку управления 6 АС, размещенной на ПЕ.
Номер вызываемой АС с помощью многоканального приемопередатчика 4(9) передается в центр коммуникации ССС, который обеспечивает речевую связь между АС ЦДП и АС ПЕ.
Для обмена речевыми сообщениями диспетчер и водитель используют блок ввода-вывода речи 7(12), подключенные к блоку управления 6(10) АС.
Для удобства составления графиков движения ПЕ по маршруту и с целью увеличения времени пребывания ПЕ в КТМ, целесообразно КТМ совместить с остановочными пунктами, расположенными на маршруте следования ПЕ.
Таким образом, использование на ЦДП в качестве многоканального приемопередатчика и на каждой ПЕ в качестве УОД абонентских станций, каждая из которых подключена к ССС с помощью своего многоканального приемопередатчика с невысокой выходной мощностью, размещение в КТМ передатчиков сообщений, соединенных с АС, размещенными на подвижных единицах, беспроводным каналом ближней связи, исключает влияние удаленности КТМ от ЦДП на сложность и стоимость системы.
Передатчики сообщений, каждый из которых содержит приемо-передающий модуль, подключенный к микроконтроллеру, размещают рядом с дорогой (в КТМ), например, в торговых павильонах на остановочных пунктах маршрута следования ПЕ, что значительно сокращает по отношению к прототипу, где в каждой КТМ размещают УОД, содержащий приемопередатчик дальнего радиоканала, время, необходимое для реализации системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2011 |
|
RU2463665C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2108626C1 |
| АВТОМАТИЗИРОВАННАЯ ДИСПЕТЧЕРСКАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ДОРОЖНЫМ ТРАНСПОРТОМ | 2005 |
|
RU2300808C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2108625C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2005 |
|
RU2303293C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2113012C1 |
| СИСТЕМА ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2387080C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ЭКСПЛУАТАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ И РЕГИСТРАТОР ПАРАМЕТРОВ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2333537C1 |
Изобретение относится к области диспетчерского контроля и управления подвижными транспортными средствами. Система содержит центральный диспетчерский пункт (ЦДП) с автоматизированным рабочим местом диспетчера на базе компьютера и многоканальным приемопередатчиком, а также узлы обмена данными между передатчиками сообщений и многоканальным приемопередатчиком ЦДП. На ЦДП в качестве многоканального приемопередатчика использована абонентская станция (АС), приемо-передающий модуль которой через канал ближней связи соединен с приемо-передающим модулем, подключенным к компьютеру автоматизированного рабочего места диспетчера. Узлы обмена данными размещены на подвижных единицах. В качестве каждого из них использована АС, приемо-передающий модуль которой через беспроводный канал ближней связи соединен с приемо-передающими модулями передатчиков сообщений. Эти передатчики размещены в контрольных точках маршрута и каждый содержит микроконтроллер, к которому подключен приемо-передающий модуль. АС ЦДЛ содержит блок управления, выполненный на микроконтроллере, к которому подключены многоканальный приемопередатчик, блок ввода-вывода речи и приемо-передающий модуль. АС каждой подвижной единицы содержит блок управления, выполненный на микроконтроллере, к которому подключены многоканальный приемопередатчик, пульт управления, блок ввода-вывода речи, дисплей и приемо-передающий модуль. Все АС системы подключены к сотовой сети связи. Изобретение позволяет создать с малыми материальными затратами систему диспетчерского управления маршрутизированным транспортом, обеспечивающую оперативную речевую связь между диспетчером и водителем любой подвижной единицы, находящейся как на маршруте следования, так и вне его, по инициативе любой стороны. 1 з.п. ф-лы, 1 ил.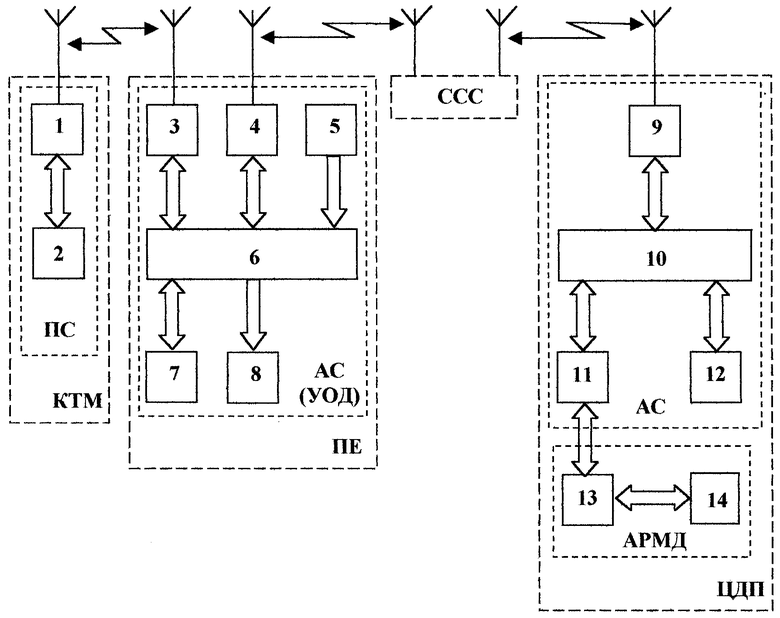
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2113012C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| СИСТЕМА МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2004 |
|
RU2243113C1 |

