Изобретение относится к схеме для компенсации отклонений частоты управляемого напряжением осциллятора с помощью второго осциллятора.
Фазовые детекторы, которые используются в контурах фазовой автоподстройки частоты (PLLs) для восстановления тактовой последовательности из сигнала данных поставляют выходной сигнал, который соответствует разнице фаз между двумя входными сигналами, что однако больше не является полезным для восстановления тактовой последовательности, если одновременно разница частот между обоими входными сигналами фазового детектора является слишком большой. Чтобы тем не менее контур подстройки фазы еще мог заскакивать на тактовую частоту, частотный диапазон содержащегося в нем управляемого напряжением осциллятора (VCO) должен быть как можно малым.
Частотный диапазон выполненного в технологии эмиттерно связанной логики (ECL) интегрального, управляемого напряжением осциллятора сильно зависит от рабочей температуры кристалла интегральной схемы и от технологически обусловленных рассеяний параметров полупроводника. Чтобы быть уверенным, что осциллятор может колебаться на желаемой частоте, перестаиваемый частотный диапазон проектируют настолько большим, чтобы желаемая частота могла надежно достигаться не только в нормальном случае, но и также в самом неблагоприятном случае; диапазон перестройки должен быть для этого соответственно большим (больше, чем одна октава). Однако тогда больше нельзя быть уверенным, что контур фазовой автоподстройки частоты заскакивает именно на правильную частоту; он может вместо этого заскакивать также на двойную частоту.
Этому можно противодействовать таким образом, что с устанавливающим сигналом управляемого напряжением осциллятора складывают устанавливающий сигнал опорного контура фазовой автоподстройки частоты; это предполагает, конечно, с одной стороны, соответствующие схемно-технические затраты для такого опорного такта, причем это может привести, с другой стороны, к нежелательным явлениям биения.
Для стабилизации частоты находящегося в корпусе термостата управляемого напряжением осциллятора предусматривают в корпусе термостата, кроме того, другой осциллятор в качестве температурного сенсора, причем в зависимости от разницы частот обоих осцилляторов получают устанавливающий сигнал для названного другого осциллятора и управляющий сигнал для управления термостата (DE-A1-3341780).
Для стабилизации частоты кварцевого осциллятора известна схема, при которой частоту управляемого термистором другого осциллятора измеряют частотомером с цифровой индикацией и результатом измерения управляют заранее программированным постоянным блоком памяти (ROM), который выдает на это сигнал коррекции частоты, который после аналого-цифрового преобразования обуславливает тонкую подстройку грубо температурно-компенсированного третьей стороной кварцевого осциллятора (US-A-3713033).
Для температурной компенсации осциллятора с параболической частотно-температурной характеристикой известна схема, при которой линейный пилообразный сигнал в AC-схеме интегратора преобразуют в параболический пилообразный сигнал, параболический фронт которого относительно температурно-зависимой фазы и тем самым при соответственно различной амплитуде считывается моностабильным мультивибратором, который запускается компаратором, нагруженным линейным пилообразным сигналом и температурным сигналом; затем считанной амплитудой сигнала управляется варактор (US-A-4492933).
Эти осцилляторные схемы всегда являются относительно сложными.
Изобретение показывает по сравнению с этим другой путь к связанному с меньшими схемными затратами полупроводниковому интегральному управляемому напряжением осциллятору высокой точности.
Изобретение относится к схеме для компенсации отклонений частоты управляемого напряжением осциллятора с помощью второго осциллятора; эта схема отличается согласно изобретения тем, что на том же самом кристалле интегральной схемы с полупроводниковым интегральным управляемым напряжением осциллятором дополнительно предусмотрен подобный, но не управляемый напряжением извне осциллятор, и из частоты колебаний которого отводят для температурного или соответственно параметрического воздействия на частоту осциллятора противофазный дополнительный управляющий сигнал для управляемого напряжением осциллятора; для этого в дальнейшем развитии изобретения выход дополнительного осциллятора через цепную (каскадную) схему моностабильного мультивибратора и следующего за ним фильтра нижних частот может быть соединен с дополнительным управляющим входом управляемого напряжением осциллятора.
Изобретение, которое не использует опорный такт как таковой, а пользуется только отведенной из него информацией о частоте подобного, равным образом зависящего от температуры и параметров опорного осциллятора, причем номинальные частоты обоих осцилляторов могут быть также совершенно различными, преимущественным образом позволяет простую компенсацию обусловленных температурой и параметрами отклонений частоты полупроводникового, интегрального управляемого напряжением осциллятора.
Дальнейшие особенности изобретения видны из последующего более подробного пояснения примера выполнения.
На фиг. 1 показана блок-схема примера выполнения полупроводникового, интегрального управляемого напряжением осциллятора согласно изобретения; на фиг. 2 - 6 - схемные особенности к нему.
Фиг. 1 показывает схематически в необходимом для понимания изобретения объеме пример выполнения полупроводниковой, выполненной на кристалле интегральной схемы Ch, управляемой напряжением осцилляторной схемы. При этом дополнительно к собственно управляемому напряжением осциллятору VCO на том же самом кристалле интегральной схемы Ch предусмотрен подобный осциллятор О, который не является управляемым напряжением извне и частота колебаний которого принципиально таким же образом, что и частота управляемого напряжением осциллятора VCO, зависят от рабочей температуры кристалла интегральной схемы Ch и от технологических параметров. Из частоты колебаний дополнительного осциллятора O затем для температурного или соответственно параметрического воздействия на частоту управляемого напряжением осциллятора VCO отводят противофазный дополнительный управляющий сигнал для управляемого напряжением осциллятора VCO, для чего в примере согласно фиг. 1 выход дополнительного осциллятора О через цепную схему из моностабильного мультивибратора MF, фильтра нижних частот F и усилителя V связан с дополнительным управляющим входом Z управляемого напряжением осциллятора VCO. При этом выходные импульсы опорного осциллятора О через моностабильный мультивибратор MF удлиняют соответственно до постоянного значения (примерно 1/4 длительности периода при нормальных параметрах и средней температуре), так что теперь соотношение импульс/пауза последовательности прямоугольных импульсов зависит от частоты колебаний осциллятора O. Включенным после него фильтром нижних частот F отфильтровывают постоянную составляющую этой последовательности прямоугольных импульсов; после усиления в последующем усилителе V усиленная постоянная составляющая служит в качестве противодействующего возможным изменениям частоты устанавливающего сигнала для управляемого напряжением осциллятора прямоугольных импульсов VCO.
Другая показывающая дальнейшие схемные особенности блок-схема такой полупроводниковой, интегральной управляемой напряжением осцилляторной схемы согласно изобретения представлена на фиг. 2. Согласно фиг. 2 опорный осциллятор O образован охваченной инвертирующей обратной связью цепной схемой буферных схем В и сдвигателей уровня P. Принципиально подобным образом также собственно управляемый напряжением осциллятор прямоугольных импульсов VCO образован охваченной положительной обратной связью цепной схемой буферных схем В и сдвигателей уровня S, причем здесь в цепной схеме предусмотрено управляющее звено М для управления частоты. Между опорным осциллятором O и дополнительным управляющим входом Z управляемого напряжением осциллятора VCO снова расположена цепная схема из моностабильного мультивибратора MF, фильтра нижних частот F и усилителя V.
Буферные ECL-схемы В могут быть реализованы видным из фиг. 4 образом, а ECL-сдвигатели уровня S видным из фиг. 5 образом; от сдвигателей уровня S согласно фиг. 5 сдвигатели уровня B отличаются только тем, что в них источники поперечного тока не являются управляемыми. Время задержки ECL-буфера B зависит от поперечного тока предшествующего сдвигателя уровня P или соответственно S: чем больше поперечный ток, тем меньше (в известных пределах) время задержки. Это может быть использовано для изменения частоты осциллятора.
Моностабильный мультивибратор MF (фиг. 2 и 3) может быть реализован видным из фиг. 3 образом. Времяопределяющими элементами ECL-моностабильного мультивибратора MF согласно фиг. 3 являются сопротивление M и емкость C. Они должны быть реализованы так, чтобы они были по возможности не зависимыми от технологических параметров, что, например, может быть достигнуто сопротивлением больших участков и использованием емкости между двумя плоскостями монтажа в кристалле интегральной схемы. Транзистор Q1 служит для того, чтобы ограничивать напряжение на RC-звене, так что конденсатор C всегда заряжается до определенного напряжения. Температурная зависимость может быть при известных обстоятельствах компенсирована таким образом, что в показанном схематично на фиг. 3 мультивибраторе, соответственно, изменяют управляющее напряжение другого транзистора выходного буфера, что может быть достигнуто за счет соответствующего зависящего от температуры управления соответствующего источника тока.
Предусмотренное в управляемом напряжением осцилляторе прямоугольных импульсов VCO (на фиг. 1 и 2) управляющее звено M для управления частоты может быть реализовано видным из фиг. 6 образом. Согласно фиг. 6 управляющее частотой звено M является ECL-мультиплексором аналогового сигнала, оба входа которого A/AX и B/BX в управляемом напряжением осцилляторе прямоугольных импульсов VCO согласно фиг. 2 подключены к двум (через буферную схему B) следующим друг за другом сдвигателям уровня S, а управляющий вход C/CX которого образует вход управления частоты управляемого напряжением осциллятора VCO (на фиг. 1 и 2). Подведенным между клеммами управляющих входов С и СХ напряжением можно устанавливать, насколько сильно появляющийся на входе A/AX сигнал или появляющийся на входе B/BX сигнал воздействует на выход Q/QX.
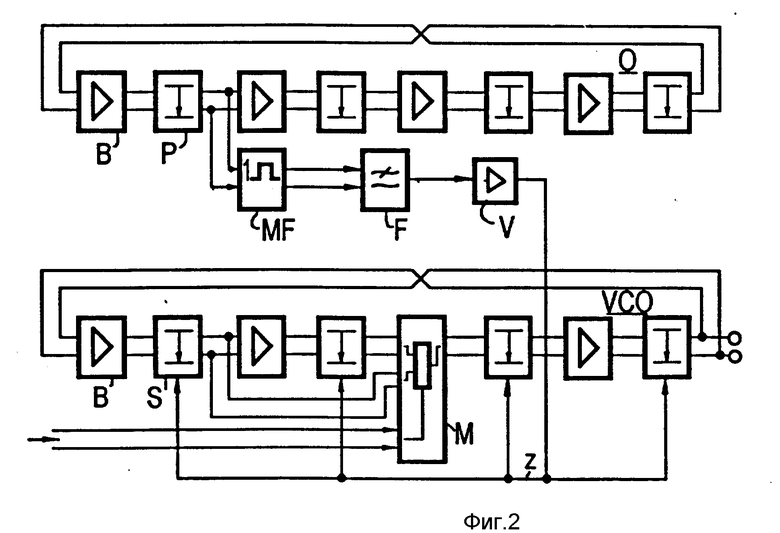
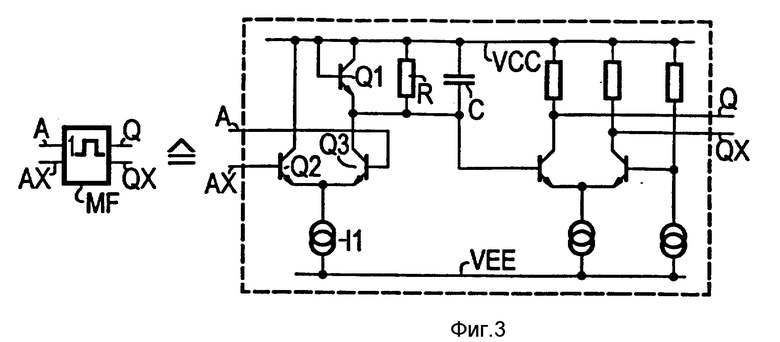
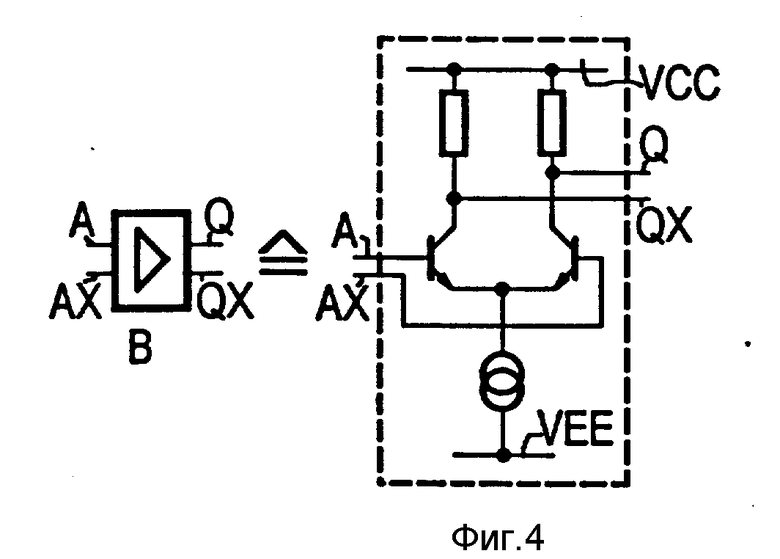
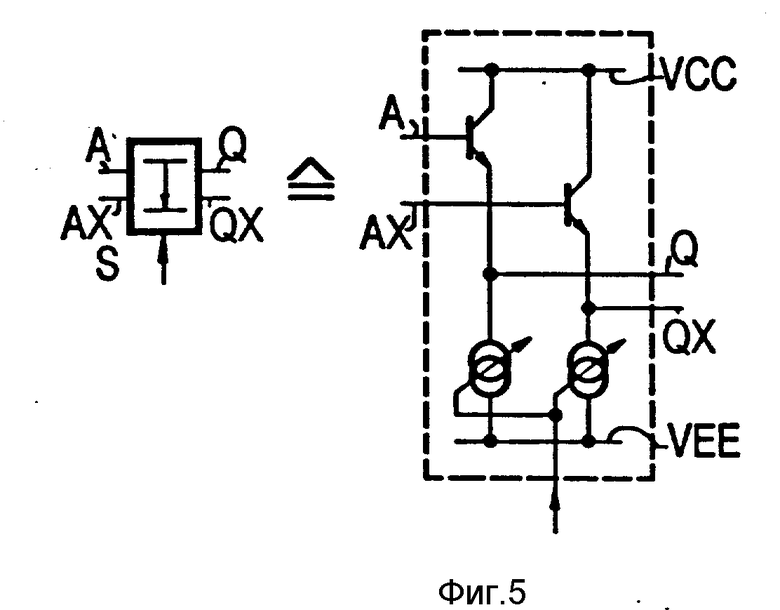
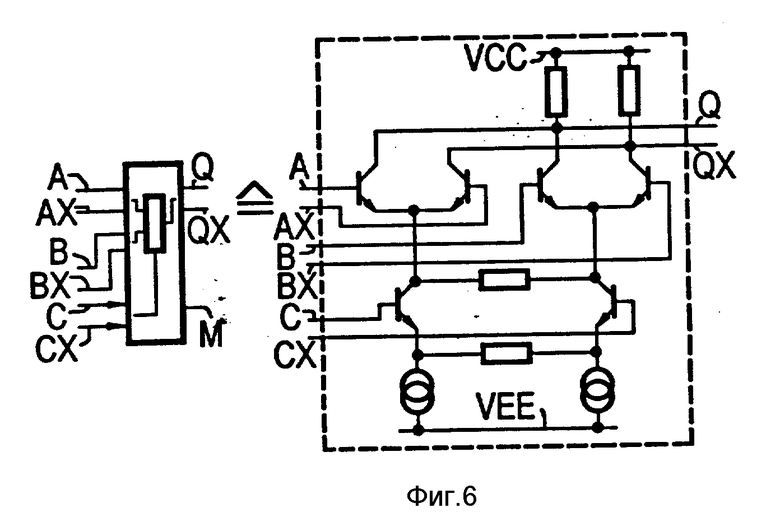
Схема для компенсации отклонений частоты управляемого напряжением осциллятора с помощью второго осциллятора. Для компенсации отклонений частоты управляемого напряжением осциллятора на том же самом кристалле интегральной схемы с полупроводниковым, интегральным, управляемым напряжением осциллятором дополнительно предусмотрен подобный, но не управляемый напряжением извне осциллятор, и из его частоты колебаний отводят для температурного или соответственно параметрического воздействия на частоту осциллятора противофазный дополнительный управляющий сигнал для управляемого напряжением осциллятора; для этого выход дополнительного осциллятора через цепную схему из моностабильного мультивибратора и следующего за ним фильтра нижних частот может быть соединен с дополнительным управляющим входом управляемого напряжением осциллятора. 3 з.п. ф-лы, 6 ил.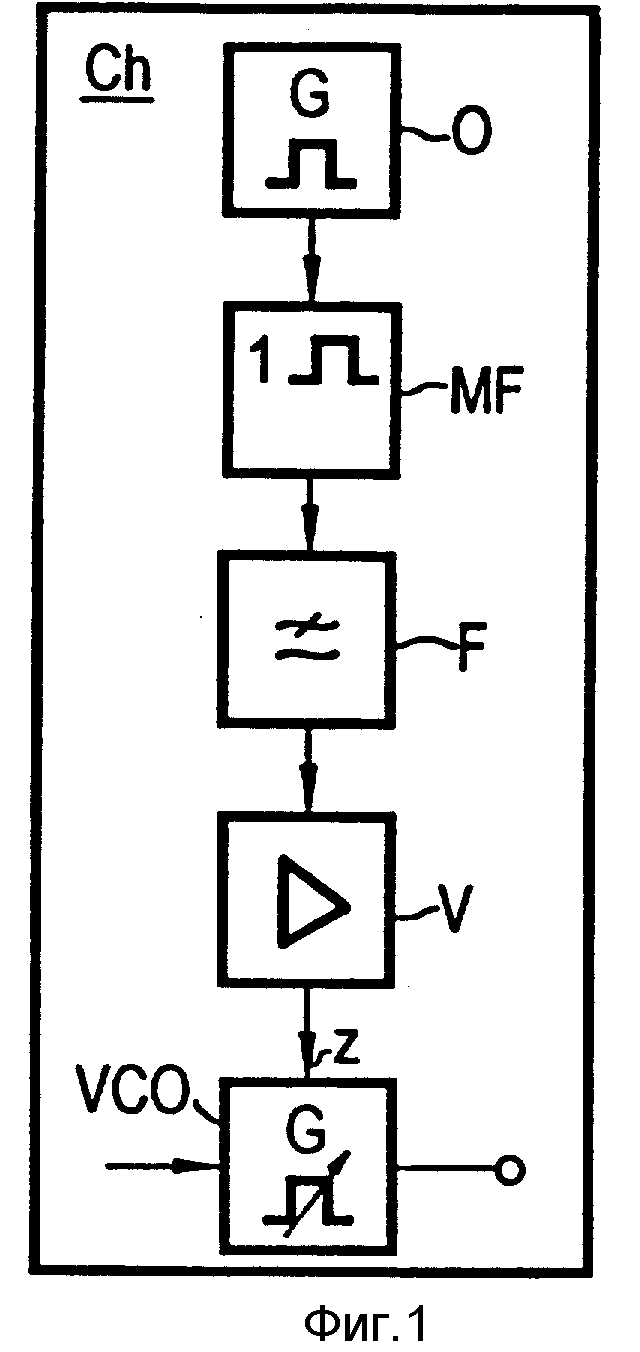
| US, патент, 3713033, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| EP, заявка, 0133388, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

