Изобретение относится к технике для нанесения газотермических покрытий распылением на изделие.
Известна установка для плазменного напыления по патенту РФ 2111066, МПК6 В 05 С 15/00 от 14.12.95, опубл. в БИ 14 от 20.05.98, содержащая теплозвукоизоляционную камеру, патрон вращения детали и плазматрон, закрепленный в гайке. Камера содержит также прямоугольную вставку с отверстием, в которую помещены подвижные сегменты, зафиксированные в корпусе от осевых перемещений подвижными фиксаторами.
Недостатком данной установки является то, что при ее использовании возможно нанести покрытие только на внешние цилиндрические поверхности. Причем не на всю поверхность, а только на небольшой ее участок, например коренную шейку коленчатого вала. В результате технологические возможности такой установки ограничены.
Известная установка для плазменного напыления по а.с. 1781314, МПК6 С 23 С 4/00 от 29.11.90, опубл. в БИ 46 от 15.12.92, содержит теплозвукоизоляционную камеру с проемом, через который внутрь камеры введено исполнительное устройство механизма колебательного движения плазматрона, пустотелый вал которого связан с приводом колебательного перемещения плазматрона, каретку и привод ее возвратно-поступательного перемещения по направляющим, подвижный щиток с отверстием, перекрывающий проем камеры, привод вращения детали.
Исполнительный механизм возвратно-поступательного перемещения плазматрона вдоль оси шпинделя привода вращения детали имеет профильный кулачок, а исполнительный механизм колебательного движения плазматрона имеет сменные дисковые кулачки и подпружиненный рычаг с роликом. При этом сменные дисковые кулачки установлены на одной оси с профильным кулачком и кинематически связаны с приводом возвратно-поступательного перемещения плазматрона. Каждый из сменных дисковых кулачков имеет возможность взаимодействия с роликом подпружиненного рычага, кинематически связанного с плазматроном. Сменные дисковые кулачки установлены на втулке, имеющей возможность осевого перемещения относительно подпружиненного рычага.
Имеется фиксатор, стопорящий подпружиненный рычаг в положении, при котором дисковые кулачки не контактируют с роликом рычага.
Недостатком данной установки плазменного напыления являются ее ограниченные функциональные возможности. Поскольку с ее помощью невозможно наносить покрытия на наружные и внутренние поверхности: конические и фасонные со сложной конфигурацией, а также на наружные поверхности: сферические и плоские торцевые, диаметр которых больше двух диаметров факела плазматрона на покрываемой поверхности.
Эти недостатки объясняются тем, что рабочее перемещение плазматрона в горизонтальном возвратно-поступательном направлении и его угловое колебание вокруг оси, перпендикулярной к направлению его горизонтального перемещения, обеспечено двумя кулачковыми механизмами, кинематически связанными между собой и приводимыми в действие только от одного общего электродвигателя. Кроме того, при перемещении плазматрона параллельно оси вращения детали, имеющей конические и фасонные сложной конфигурации поверхности, изменяется расстояние от покрываемой поверхности до плазматрона, что недопустимо. К тому же в установке нет рабочего возвратно-поступательного перемещения плазматрона в направлении, перпендикулярном к направлению его горизонтального перемещения, а есть только перемещение, осуществляемое от ручного винтового механизма при настройке до начала работы установки. К недостаткам можно отнести и то, что привод возвратно-поступательного перемещения каретки предназначен только для подвода каретки в исходное положение перед началом работы. Поэтому установка обеспечивает нанесение покрытия на наружные и внутренние цилиндрические поверхности на длине, величина которой ограничена возможностями кулачкового механизма. А именно, его максимальным углом давления - α max (см. кн. А.Ф. Крайнев. Словарь-справочник по механизмам, изд. Второе, М., "Машиностроение", с. 185). Установка обеспечивает также нанесение покрытия только на плоские торцевые поверхности деталей, диаметр которых не больше двух диаметров факела плазматрона на покрываемой поверхности.
Плазматрон, выставленный при настройке с помощью ручного винтового механизма так, чтобы края его факела на покрываемой поверхности касались (гипотетически) оси вращения этой детали, остается при работе неподвижным и при вращении шпинделя с деталью обеспечивает, как это указано выше, нанесение покрытия на поверхность, диаметр которой не больше двух диаметров факела плазматрона на этой поверхности. Смещение плазматрона от оси вращения детали и обратно во время его работы механизмами установки не предусмотрено. Диаметр факела на покрываемой поверхности детали зависит от установочного положения h. Размер покрываемых внутренних сферических поверхностей также зависит от установочного положения h.
Кроме того, к недостаткам можно отнести и то, что установка выполнена конструктивно сложной, неудобной в эксплуатации и имеет большой габарит по длине.
Установка неудобна в эксплуатации из-за необходимости изготовления новых кулачков и перенастройки кулачковых механизмов при осуществлении покрытия поверхностей деталей с другими размерами. Присутствует также неудобство при настройке установочного размера Н и установочного положения h из-за необходимости использования ручных винтовых механизмов. Выполнение подвижного щитка в виде жесткой пластины, длина которой должна обеспечивать перекрытие проема в камере при двух крайних положениях каретки, на которой смонтированы исполнительные механизмы, приводит к тому, что в любом его крайнем положении часть щитка будет выходить за габариты камеры. Для устранения этого недостатка камера должна быть увеличена по длине.
Задачей, решаемой данным изобретением, является расширение функциональных возможностей установки.
При этом она должна быть конструктивно простой, удобной при настройке на новый типоразмер покрываемых деталей и иметь небольшие габариты по длине.
Технический результат, достигаемый при использовании настоящего изобретения, заключается в получении возможности перемещения плазматрона по более сложным траекториям в зоне обслуживания, имеющей большую площадь.
Это обеспечено следующими полученными дополнительными возможностями:
- независимым перемещением плазматрона в направлении (по координате Y), перпендикулярном имеющемуся горизонтальному направлению (по координате X);
- независимым друг от друга перемещением плазматрона в горизонтальном возвратно-поступательном направлении (по координате X) и его угловым колебанием вокруг оси (Z или Y), перпендикулярной к этому направлению.
Дополнительное перемещение (по координате Y) может быть выполнено, например, вертикальным или горизонтальным. В результате сложения одновременного возвратно-поступательного движения плазматрона по двум перпендикулярным координатам (X и Y) обеспечивается его движение под углом к обеим координатам и по более сложным траекториям.
Указанный выше технический результат достигается тем, что установка плазменного напыления, содержащая теплозвукоизоляционную камеру с проемом, через который внутрь камеры введено исполнительное устройство механизма колебательного движения плазматрона, пустотелый вал которого связан с приводом механизма колебательного перемещения плазматрона, каретку и привод ее возвратно-поступательного перемещения по направляющим, подвижный щиток с отверстием, перекрывающий проем камеры, привод вращения детали, дополнительно снабжена пустотелой штангой и ее направляющей, выполненной в каретке и пропущенной через отверстие в щитке, при этом штанга введена внутрь камеры, причем один конец штанги жестко соединен с гайкой дополнительно выполненной винтовой передачи, ходовой винт которой установлен в подшипниковых опорах на каретке параллельно оси штанги и кинематически связан с приводом возвратно-поступательного перемещения штанги, другой конец штанги размещен в своей направляющей, внутри штанги размещен телескопический вал, образованный пустотелым валом механизма колебательного движения плазматрона и дополнительно введенным валом, один конец которого соединен с пустотелым валом, с возможностью осевого смещения, а другой его конец установлен в подшипниковой опоре на штанге и связан с плазматроном. Подвижный щиток выполнен в виде гибкой ленты, оба конца которой намотаны на подпружиненные барабаны.
Снабжение установки штангой обеспечило дополнительную возможность реализации возвратно-поступательного перемещения плазматрона в направлении, перпендикулярном к уже имеющемуся горизонтальному перемещению. Для этого в каретке выполнена направляющая для штанги. Эта направляющая пропущена через отверстие в подвижном щитке. Размещение штанги в направляющей позволило подвести один из ее концов к плазматрону. Для осуществления перемещения штанги другой ее конец жестко соединен с гайкой дополнительно выполненной винтовой передачи, винт которой установлен в подшипниковых опорах на каретке параллельно оси штанги. Такое выполнение винтового механизма, связанного кинематически с приводом возвратно-поступательного перемещения штанги, позволило механизировать это перемещение. Выполнение штанги пустотелой позволило разместить внутри ее полости дополнительный телескопический вал. Который образован пустотелым валом механизма колебательного движения плазматрона и дополнительно введенным валом, один конец которого соединен с пустотелым валом с возможностью осевого смещения, а другой его конец установлен в подшипниковой опоре на штанге и соединен с плазматроном. В результате стало возможным осуществлять во всем диапазоне перемещения штанги колебательное движение плазматрона. Предложенная совокупность новых признаков совместно с совокупностью известных признаков обеспечила расширение функциональных возможностей установки путем расширения зоны обслуживания внутри камеры и возможностью осуществлять перемещение плазматрона по более сложным траекториям. Выполнение подвижного щитка в виде гибкой ленты, оба конца которой намотаны на подпружиненные барабаны, обеспечило уменьшение габарита установки по ее длине.
На фиг. 1 показана предлагаемая установка, вид спереди; на фиг.2 - сечение А-А; на фиг.3 - элемент Б; на фиг.4 - элемент В; на фиг.5 - сечение Г-Г; на фиг.6 - сечение Д-Д.
Установка для плазменного напыления (см. фиг.1) содержит теплозвукоизоляционную камеру 1 с дверью 2 и смотровым окном 3. С наружной стороны камеры 1 смонтирован привод 4 вращения детали, закрепленный на конце шпинделя 5, проходящего в проем стенки камеры 1.
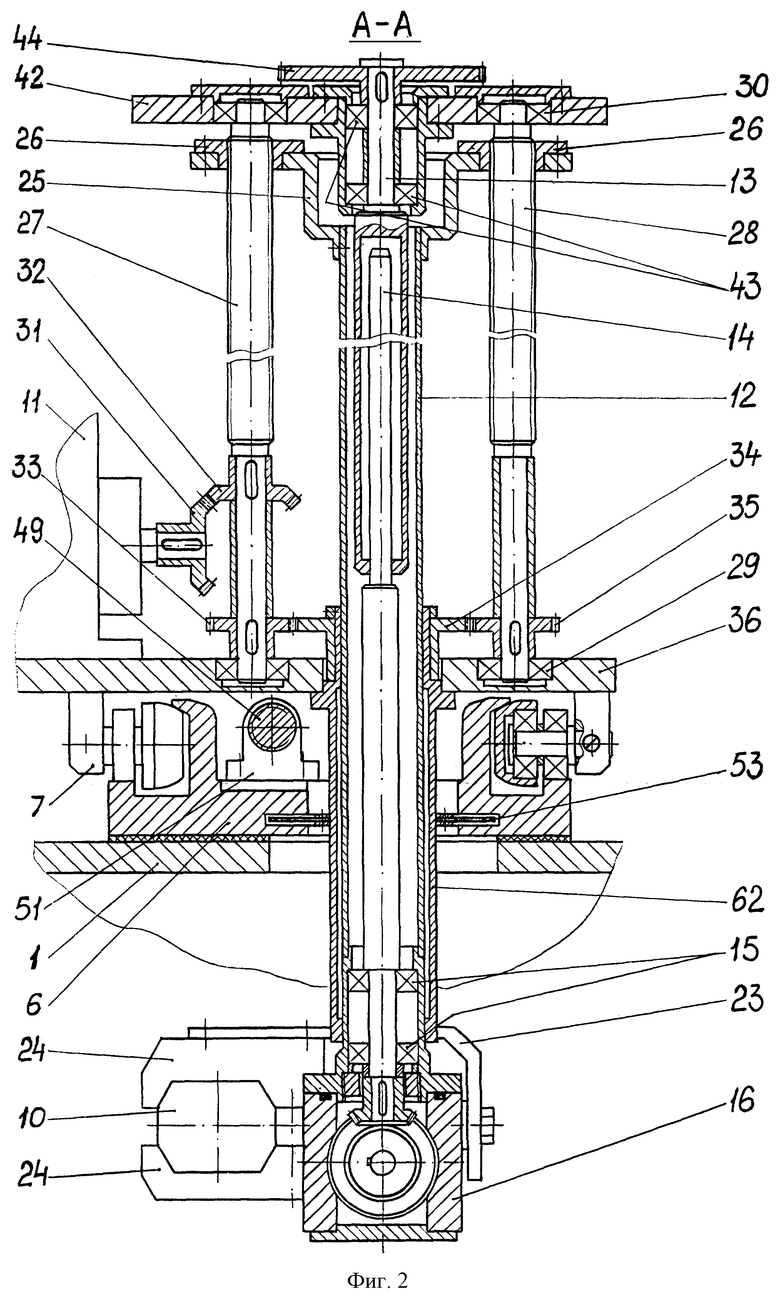
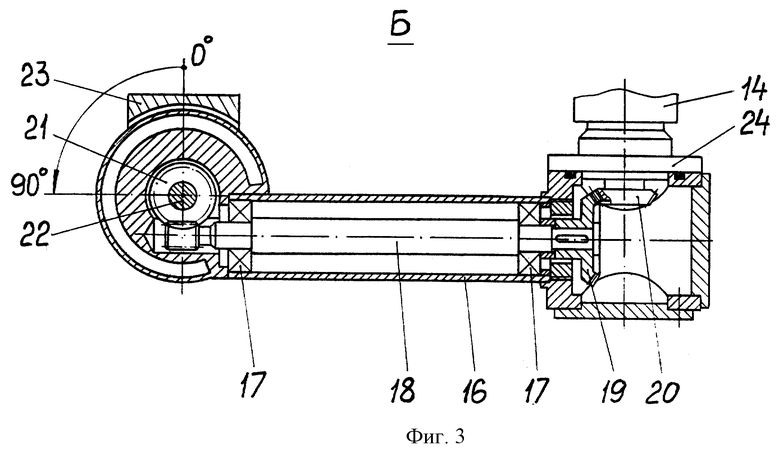
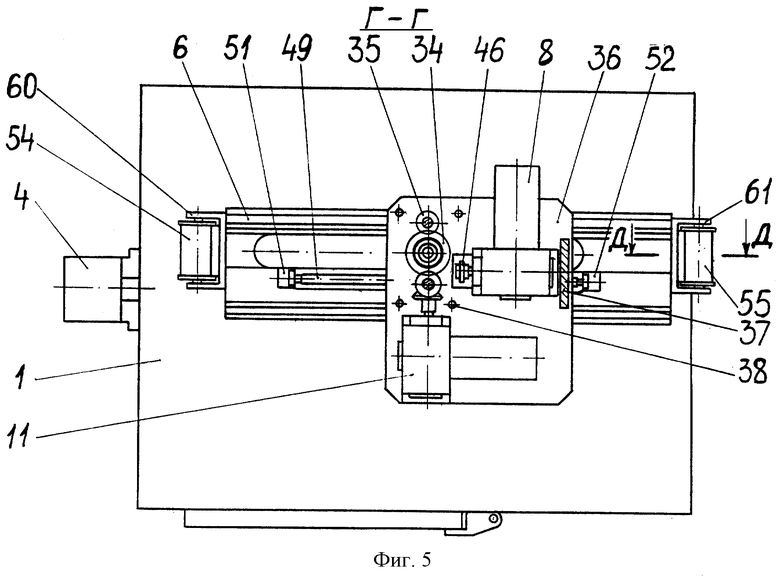
С наружной верхней стороны камеры 1 на направляющих 6 расположена каретка 7 с приводом 8 ее возвратно-поступательного перемещения. На каретке 7 (см. фиг.2 и 5) размещены также привод 9 механизма колебательного перемещения плазматрона 10 и привод 11 возвратно-поступательного перемещения штанги 12. Штанга 12 введена внутрь камеры 1 через проем в ее верхней стенке. Механизм колебательного перемещения плазматрона 10 содержит телескопический вал, который образован пустотелым валом 13 и валом 14, смонтированными внутри пустотелой штанги 12. Один конец вала 14 соединен с помощью, например, шлицевого соединения с пустотелым валом 13 с возможностью осевого смещения, а другой его конец установлен в подшипниковых опорах 15 на штанге 12. Нижний конец штанги 12 состоит из корпуса 16. Внутри корпуса 16 (см. фиг.3) на подшипниковых опорах 17 установлен вал 18, один конец которого выполнен в виде червяка, а на другом его конце закреплено коническое зубчатое колесо 19, образующее коническую пару с другим коническим зубчатым колесом 20, закрепленным на валу 14. Червячное колесо 21, находящееся в зацеплении с червяком вала 18, жестко связано с валом 22, на котором закреплен кронштейн 23 с возможностью его поворота на угол  например 90o, и обратно вокруг оси вала 22 (см. фиг. 3). К кронштейну 23 через изоляционные прокладки 24 прикреплен плазматрон 10.
например 90o, и обратно вокруг оси вала 22 (см. фиг. 3). К кронштейну 23 через изоляционные прокладки 24 прикреплен плазматрон 10.
Описанный пример выполнения соединения вала 14 с плазматроном 10 не является обязательным и может быть, при необходимости, другим. Например (не показано), плазматрон 10 может быть закреплен непосредственно на валу 14 через изоляционные прокладки с возможностью поворота на угол β, размер которого может быть разным в каждом конкретном случае. Для этого вал 14 должен выступать из корпуса 16.
Верхний конец штанги 12 жестко соединен через траверсу 25 с двумя гайками 26 двух однотипных винтовых механизмов, ходовые винты 27 и 28 которых установлены в подшипниковых опорах 29 и 30 на каретке 7. Оси вращения ходовых винтов 27 и 28 параллельны оси штанги 12. Ходовой винт 27 через пару конических зубчатых колес 31 и 32 кинематически связан с приводом 11 возвратно-поступательного перемещения штанги 12. Этот же ходовой винт 27 через зубчатые колеса 33, 34 и 35 кинематически связан с ходовым винтом 28.
Описанный пример соединения верхнего конца штанги 12 с двумя винтовыми механизмами не является обязательным. Верхний конец штанги 12 может быть, например, при соблюдении условий работы направляющей без заклинивания, соединен только с одним винтовым механизмом (не показано).
Каретка 7 содержит основную платформу 36 (см. фиг.1, 2 и 5), на которой смонтированы привод 8 ее возвратно-поступательного перемещения, привод 11 возвратно-поступательного перемещения штанги 12, подшипниковые опоры 29, кронштейн 37 и четыре стойки 38. Каретка 7 снабжена вспомогательной платформой, которой является горизонтальное плечо кронштейна 37. На вспомогательной платформе смонтированы привод 9 механизма колебательного перемещения плазматрона 10, подшипниковая опора, аналогичная подшипниковой опоре 29 вала 39 (не показана). Вал 39 через конические зубчатые колеса 40 и 41 кинематически связан с приводом 9 механизма колебательного перемещения плазматрона 10. В верхней части каретки 7 выполнена поперечина 42, опирающаяся на четыре стойки 38. На поперечине 42 смонтированы подшипниковые опоры 30, 43 и подшипниковая опора вала 39, аналогичная подшипниковой опоре 30 (не показана).
Верхний конец пустотелого вала 13 через зубчатые колеса 44 и 45 (см. фиг. 1) кинематически связан с валом 39, а через конические зубчатые колеса 40 и 41 кинематически связан с приводом 9 механизма колебательного перемещения плазматрона 10.
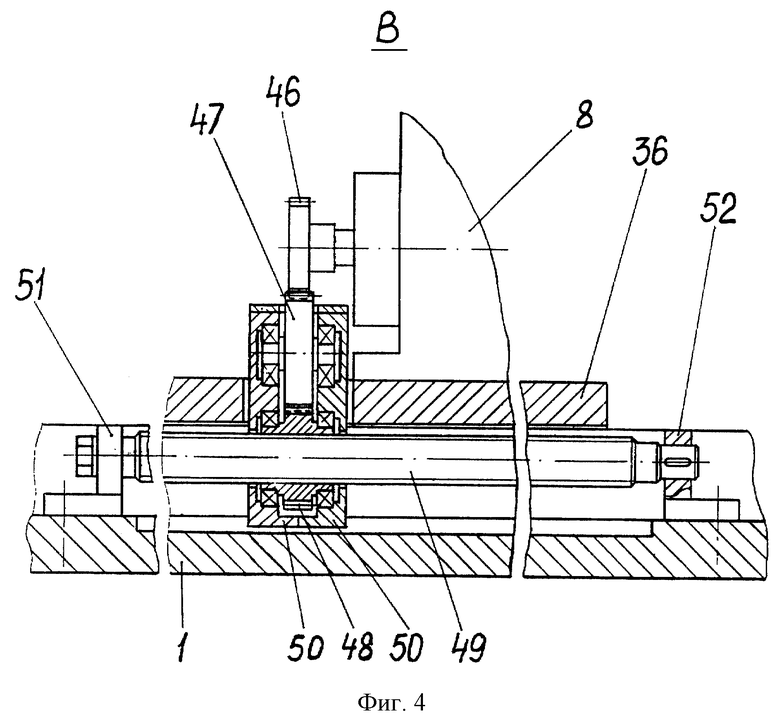
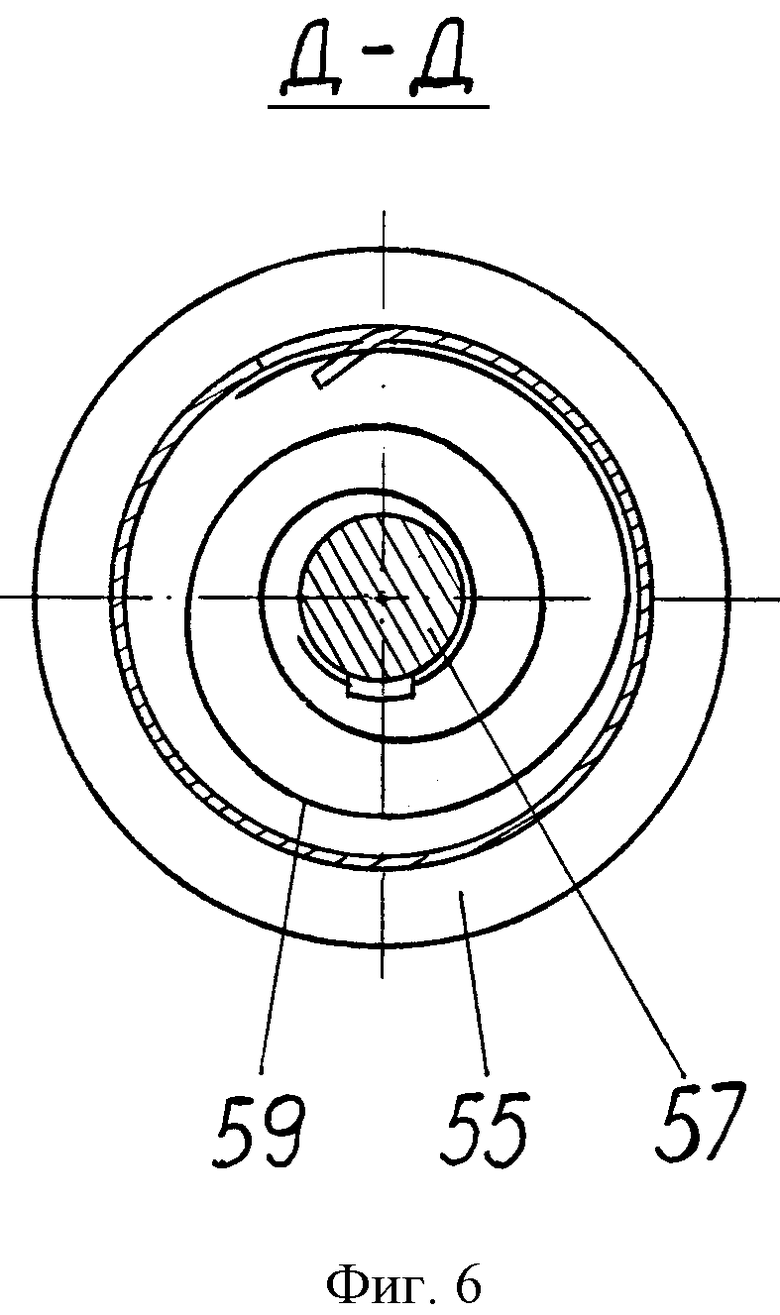
Привод 8 возвратно-поступательного перемещения каретки 7 (см. фиг.6) кинематически связан через зубчатые колеса 46, 47 и гайку 48, выполненную в виде зубчатого колеса, с неподвижным ходовым винтом 49. Зубчатое колесо 47 и гайка 48 смонтированы в корпусе 50. Корпус 50 выполнен разъемным из двух одинаковых деталей. Обе детали корпуса 50 жестко соединены между собой и закреплены на основной платформе 36 каретки 7 через кронштейн (не показан). Ходовой винт 49 закреплен кронштейнами 51 и 52 на направляющей 6.
Описанный пример выполнения привода 8 возвратно-поступательного перемещения каретки 7 не является обязательным и может быть выполнен другим. Привод 8 может быть закреплен на стенке камеры 1 (не показано) и непосредственно соединен с ходовым винтом каретки 7, смонтированным с возможностью вращения и взаимодействия с гайкой. При этом гайка должна быть закреплена на основной платформе 36 каретки 7.
Проем камеры 1, через который пропущена штанга 12, перекрыт подвижным щитком 53 (см. фиг.1, 3 и 4). Подвижный щиток 53 выполнен в виде гибкой ленты, оба конца которой намотаны на барабаны 54 и 55. Барабаны 54 и 55 установлены на осях 56 и 57 вращения и подпружинены пружинами 58 и 59. Оси 56 и 57 закреплены соответственно на кронштейнах 60 и 61. В подвижном щитке 53 выполнено отверстие, через которое пропущена длинномерная втулка 62 каретки 7. Втулка 62 может быть выполнена отдельной деталью, закрепленной на каретке 7, или быть выполненной заодно с кареткой 7. Втулка 62 жестко соединена с подвижным щитком 53. Нижняя часть штанги 12 размещена в направляющей, которой является втулка 62 каретки 7. Боковые края подвижного щитка 53 размещены в продольных пазах, выполненных в направляющей 6 (см. фиг.4).
В приводе 4 вращения детали может быть применен электродвигатель переменного тока, поскольку вращение различных деталей в процессе нанесения покрытия на их поверхности может осуществляться с одинаковой скоростью независимо от их размеров. При этом необходимые технологические режимы обеспечиваются электродвигателями приводов 8, 9 и 11. В приводе 8 возвратно-поступательного перемещения каретки 7, приводе 9 механизма колебательного перемещения плазматрона 10 и приводе 11 возвратно-поступательного перемещения штанги 12 могут использоваться как шаговые электродвигатели, так и двигатели постоянного тока. Управление этими двигателями осуществляется устройством программного управления промышленного робота. Такие устройства выпускаются промышленностью в Российской Федерации и за рубежом. В настоящее время более современными являются устройства второго поколения, выполняемые на базе микро-ЭВМ и микропроцессоров. Характерным признаком этих устройств является реализация функций управления средствами программного обеспечения вместо схемной реализации заданного набора функций. Многие устройства этого поколения имеют режим адаптивного управления, при котором по сигналам с датчиков (не показаны), установленных на исполнительных механизмах промышленного робота установки, осуществляется корректировка программы. В качестве датчиков используются, например, фотоэлектрические датчики, которые связаны с выходными валами приводов 8, 9 и 11, а также конечные выключатели, устанавливаемые в крайних положениях подвижных элементов исполнительных механизмов.
В зависимости от типа обрабатываемой детали осуществляется соответствующая настройка и последовательность работы исполнительных механизмов установки, которая записывается на программу управления.
При закреплении покрываемой детали на шпинделе 5 привода 4 вращения детали дверь 2 камеры 1 открыта, а каретка 7 отведена в исходное положение. В зависимости от вида наносимого покрытия в плазматрон 10 подают проволоку или порошок. Устройства (не показаны), осуществляющие такую подачу покрываемого материала, монтируются на камере или рядом с ней. В камере 1 выполнены отверстия для подвода через них покрываемых материалов.
Заданные технологией режимы: скорость перемещения каретки 7, скорость перемещения штанги 12, скорость углового (колебательного) перемещения плазматрона 10, количество совершаемых плазматроном 10 перемещений по заданной траектории во время нанесения покрытия на поверхность детали задаются программой управления. Поскольку, как это уже отмечалось выше, в установке могут использоваться устройства программного управления промышленным роботом, выпускаемые промышленностью, поэтому здесь не рассматривается их устройство и работа.
Предложенная установка имеет большие функциональные возможности, обеспечивая покрытие следующих наружных и внутренних поверхностей различных деталей: сферических, цилиндрических, конических, фасонных со сложной конфигурацией и торцевых плоских поверхностей. Это достигнуто возможностью перемещения плазматрона по трем координатам (X, Y, ϕ) независимо друг от друга.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ ИЗ НЕТКАНОГО МАТЕРИАЛА МР НА ПРОВОЛОЧНОЙ ОСНОВЕ И СТАНОК ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ | 2001 |
|
RU2195381C2 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ РАДИОЭЛЕМЕНТОВ ИЗ СТОПЫ | 1998 |
|
RU2141748C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ СФЕРИЧЕСКИМ ОБЪЕКТОМ | 1996 |
|
RU2110398C1 |
| УСТРОЙСТВО ДЛЯ ВЗРЫВНОЙ РЕЗКИ ТРУБ | 2001 |
|
RU2204689C2 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ АРМИРОВАННЫХ ПЛАСТИН | 1998 |
|
RU2152293C1 |
| ТУРНИКЕТ | 1996 |
|
RU2119034C1 |
| СПОСОБ МАНИПУЛИРОВАНИЯ СФЕРИЧЕСКИМ ОБЪЕКТОМ | 1996 |
|
RU2105663C1 |
| СПОСОБ ГЛУБОКОЙ ИМПУЛЬСНОЙ ВЫТЯЖКИ ДЕТАЛЕЙ | 2000 |
|
RU2187399C2 |
Изобретение относится к технике для нанесения газотермических покрытий. Теплозвукоизоляционная камера с проемом, через который внутрь камеры введено исполнительное устройство механизма колебательного движения плазматрона, пустотелый вал которого связан с приводом механизма колебательного перемещения плазматрона, каретка и привод ее возвратно-поступательного перемещения по направляющим, подвижный щиток с отверстием, перекрывающий проем камеры, привод вращения детали. Установка для плазменного напыления дополнительно снабжена пустотелой штангой и ее направляющей, выполненной в каретке и пропущенной через отверстие в щитке, при этом штанга введена внутрь камеры, причем один конец штанги жестко соединен с гайкой дополнительно выполненной винтовой передачи, ходовой винт которой установлен в подшипниковых опорах на каретке параллельно оси штанги и кинематически связан с приводом возвратно-поступательного перемещения штанги, другой конец штанги размещен в своей направляющей, внутри штанги размещен телескопический вал, образованный пустотелым валом механизма колебательного движения плазматрона и дополнительно введенным валом, один конец которого соединен с пустотелым валом, с возможностью осевого смещения, а другой его конец установлен в подшипниковой опоре на штанге и связан с плазматроном. Подвижный щиток выполнен в виде гибкой ленты, оба конца которой намотаны на подпружиненные барабаны. Изобретение позволяет перемещать плазматрон по трем координатам (Х, Y, ϕ) независимо друг от друга в зоне обслуживания, имеющей большую площадь, что расширяет функциональные возможности установки. 1 з.п. ф-лы, 6 ил.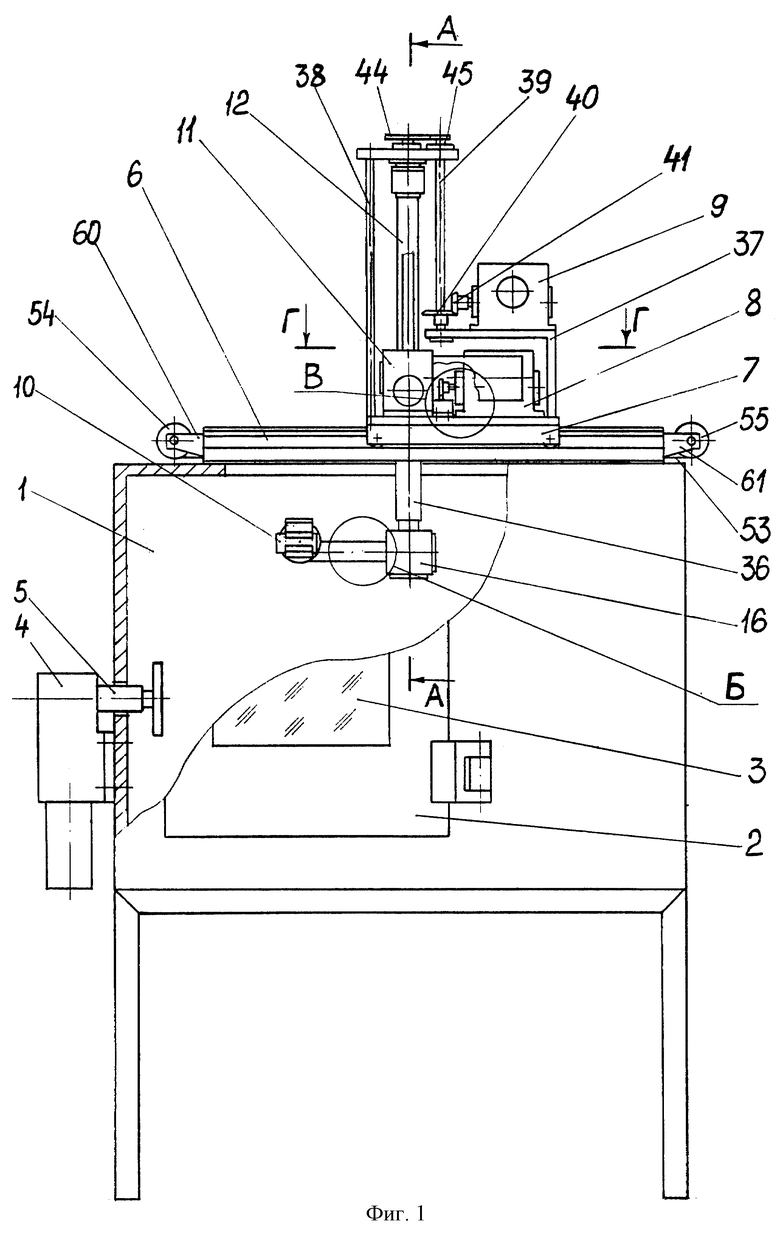
| Установка для плазменного напыления | 1990 |
|
SU1781314A1 |
| УСТАНОВКА ДЛЯ ПЛАЗМЕННОГО НАПЫЛЕНИЯ | 1995 |
|
RU2111066C1 |
| УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ГАЗОТЕРМИЧЕСКИХ ПОКРЫТИЙ | 1997 |
|
RU2120492C1 |
| УСТАНОВКА ДЛЯ ПЛАЗМЕННОГО НАПЫЛЕНИЯ | 1997 |
|
RU2125115C1 |
| СН 656400 А5, 30.06.1986 | |||
| ТЕРМОЯДЕРНЫЙ РЕАКТОР И СПОСОБ ПРОВЕДЕНИЯ РЕАКЦИИ В НЕМ | 1996 |
|
RU2174717C2 |
| US 3900639 А, 19.08.1975. | |||

