Изобретение относится к способу и устройству для управления дорожными катками, главным образом асфальтовыми катками, посредством рычага управления, с регулируемой максимальной скоростью, достигаемой путем регулируемого ускорения, при этом переднее или заднее направление движения выбирается переключателем, установленным так, что каток автоматически приводится в остановленное состояние с регулируемой величиной замедления, когда направление движения переключается с переднего на заднее, после чего направление движения меняется на обратное и скорость автоматически увеличивается с заданной величиной ускорения, пока не будет достигнута заданная максимальная скорость. Соответствующая операция применяется и для изменения направления движения катка с заднего на переднее. Рычаг управления подвижен от нейтрального положения до положения обеспечения максимальной скорости, при этом изменение направления - передний ход/задний ход - выбирается переключателем. При необходимости каток может быть остановлен посредством перемещения рычага в нейтральное положение.
После того, как на протяжении 20 -100 м дорожное полотно покрывается асфальтом, асфальтовый каток проходит по покрытию в переднем и заднем направлении от 2 до 8 раз. Этот процесс требует частого изменения направления движения катка. При этом для обеспечения удовлетворительного уплотнения важно сохранять равномерную скорость и выполнять ускорение и торможение, величина которых невелика. Большая величина замедления и ускорения повышает опасность сдвига асфальта и в результате приводит к постоянному появлению на асфальте трещин и отпечатков.
Как известно, строительные самоходные средства снабжены рычагами управления, предназначенными для управления поворотом самоходного средства направо или налево, при этом рычаг снабжен переключателем для переключения на выбранный поворот вправо или влево, причем рычаг работает в пределах диапазона его отклонения, в котором отклонение рычага пропорционально скорости самоходного средства. Перевод с переднего хода на задний осуществляется переключателем, который выполнен за одно целое с рычагом.
Работа этими известными рычагами управления определяется квалификацией оператора самоходного средства и его умением правильно оценить ситуацию, а ускорение, замедление и максимальная скорость самоходного средства зависят от той скорости, с которой рычаг перемещается к его положению максимального отклонения. В случае асфальтового катка, как указано ранее, особенно важно, чтобы такой дорожный каток выполнял ускорение или замедление, величина которых незначительна и равномерна. Скорость приведения катка в движение также должна удерживаться постоянной, причем ее величина выбирается при выполнении операции такой, чтобы обеспечить получение удовлетворительного уплотнения.
Цель изобретения заключается в создании способа работы катка, в частности посредством рычага управления, который может перемещаться из нейтрального положения в положение максимального отклонения, при этом направление движения вперед или назад устанавливается посредством переключателя, объединенного с рычагом управления, а желательные ускорение, торможение и максимальная скорость легко программируются посредством нажимных кнопок на электронном блоке, встроенном в рычаг управления, причем каток ускоряется, когда рычаг управления перемещается из его нейтрального положения в положение максимального отклонения, с величиной ускорения, пропорциональной скорости, с которой рычаг перемещается вперед, пока не будет достигнута заданная максимальная скорость. Эта заданная максимальная скорость сохраняется до тех пор, пока не будет приведен в действие переключатель переднего/заднего хода. После этого каток с заданной степенью торможения автоматически приводится в остановленное состояние. Затем каток с заданной степенью ускорения ускоряется в противоположном направлении до тех пор, пока не будет достигнута заданная максимальная скорость. Оператор в любое время может полностью остановить самоходное средство путем перемещения рычага в нейтральное положение. При этом самоходное средство будет остановлено с максимально допустимой степенью замедления, которая обычно значительно отличается от меньшей степени замедления, обеспечиваемой в том случае, когда приводится в действие переключатель переднего/заднего хода. В критической ситуации водитель может соответствующим образом быстро остановить самоходное средство, используя естественное перемещение рычага без необходимости первоначального отказа от автоматического способа. Электронный блок также предполагает возможность аварийной остановки для немедленного приведения самоходного средства в остановленное состояние. Для предотвращения движения самоходного средства в том случае, когда рычаг управления по неосторожности приведен в рабочее состояние либо когда рычаг не находится в нейтральном положении, переключатель переднего/заднего хода вначале должен быть перемещен в дополнительное, неблокирующее положение для того, чтобы добиться выполнения предполагаемой операции самоходного средства.
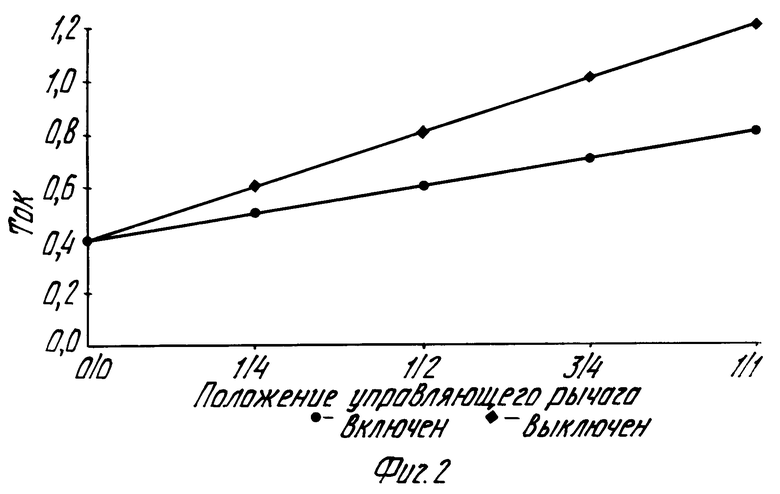
На фиг. 1 представлена блок-схема, показывающая рычаг управления и различные функции подсоединенного к нему электронного блока; на фиг. 2 - схема, показывающая один из примеров зависимости между отклонением рычага управления и током; на фиг. 3 - схема, показывающая пример крутизны кривых, характеризующих ускорение/замедление; на фиг. 4 - схема гидравлического привода для движения катка.
На фиг. 1 рычаг управления 1 может перемещаться между нейтральным положением 0 и положением MAX максимального отклонения. Переключатель 2 переднего/заднего хода, который может занимать одно из двух фиксированных положений, т.е. положение переднего хода (F) и заднего хода (R), выполнен за одно целое с рукояткой рычага управления. Переключатель также обеспечен дополнительным неблокирующим положением для каждого положения, которое вначале должно быть выбрано, когда рычаг перемещается из своего нейтрального положения, перед тем как могут быть выбраны передний ход или задний ход. Это сделано для того, чтобы предотвратить движение самоходного средства, если рычаг управления приведен в действие по неосторожности. Переключатель 2 определяет, к какому из гидравлических клапанов 10, 11 (фиг. 4) подать рабочую жидкость под давлением, с тем, чтобы установить в требуемое положение гидравлический клапан 13, который, в свою очередь, обеспечивает возможность прохождения рабочей жидкости для приведения в действие сервомеханизма 14 насоса. Когда рычаг управления 1 перемещается вперед, ток, идущий к клапану 10, 11, увеличивается согласно крутизне характеристики по времени. При установке клапана 10,11 в определенное положение давление рабочей жидкости, вызываемое этой установкой, будет увеличиваться пропорционально силе тока. Клапан 13 устанавливается в определенное положение и давление жидкости будет действовать на сервомеханизм 14, который обеспечивает настройку гидравлического насоса 15. Повышенное давление приводит к увеличению угла насоса, а этим увеличивается расход рабочей жидкости к ходовым моторам катка, которые соответствующим образом увеличивают его скорость.
Скорость движения, которая может регулироваться от 2 кг/ч до максимальной скорости, регулируется управляющими кнопками 3 на электронном блоке 6, при этом ток может регулироваться от 0,6 до 1,2 А. Кнопка 7 ПАМЯТЬ используется для программирования скорости движения. Когда самоходное средство достигает желаемой скорости движения, задействованная кнопка 7 ПАМЯТЬ обеспечивает запоминание текущей скорости в памяти. Эта память приводится в действие, когда переключатель 4 ОГРАНИЧИТЕЛЬ в течение работы катка переключается в положение ВКЛЮЧЕН, заставляя каток достигать запрограммированную скорость, когда рычаг управления полностью отклонен. Однако, если переключатель 4 находится в положении ВЫКЛЮЧЕН, полное отклонение рычага вызывает работу катка с максимальной скоростью. Если оператор производит переключение из положения ВЫКЛЮЧЕН в положение ВКЛЮЧЕН, когда каток находится в движении, то каток замедлит движение согласно заданной крутизне характеристики со скоростью, пропорциональной отклонению рычага и хранящейся в памяти скорости хода. Соответствующие события будут иметь место, если оператор производит переключение из положения ВКЛЮЧЕН в положение ВЫКЛЮЧЕН, когда каток находится в движении, т.е. каток будет ускоряться согласно заданной крутизне характеристики, при этом скорость будет пропорциональна отклонению рычага. Величина (наклон) ускорения/замедления может быть увеличена или уменьшена с помощью кнопок соответственно 5+ и 5-. Эта величина демонстрируется на дисплее 12 в том случае, если дисплей посредством кнопки 6 настроен на способ A. Упомянутая величина определяет, насколько быстро увеличивается или уменьшается ток, идущий к клапану 10, 11. Когда дисплей не задействован по способу A, а переключатель находится в положении ВКЛЮЧЕН, на дисплее высвечивается L, а этим указывается, что обеспечена запрограммированная приводная скорость.
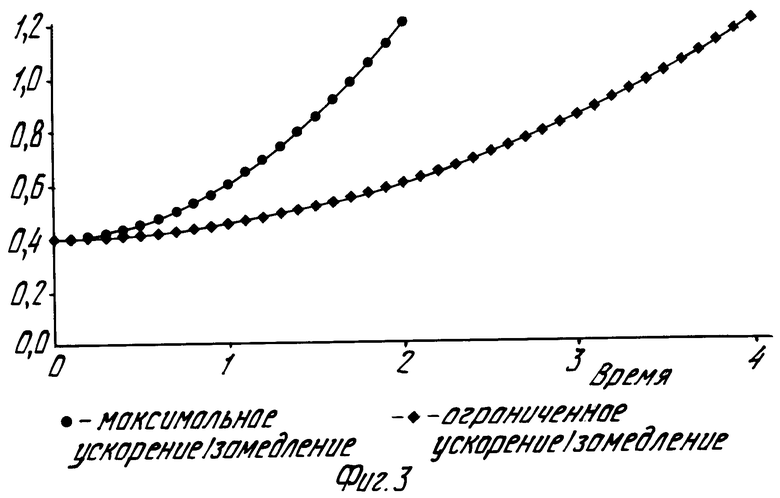
На фиг. 2 представлена диаграмма, показывающая, как увеличивается ток, идущий к клапанам 10, 11, с увеличением отклонения рычага. Верхняя кривая характеризует увеличение тока, когда переключатель 4 находится в положении ВЫКЛЮЧЕН, а нижняя кривая представляет собой пример крутизны характеристики, когда переключатель находится в положении ВКЛЮЧЕН. Когда рычаг полностью отклонен, ток может быть ограничен между 0,6 и 1,2 A.
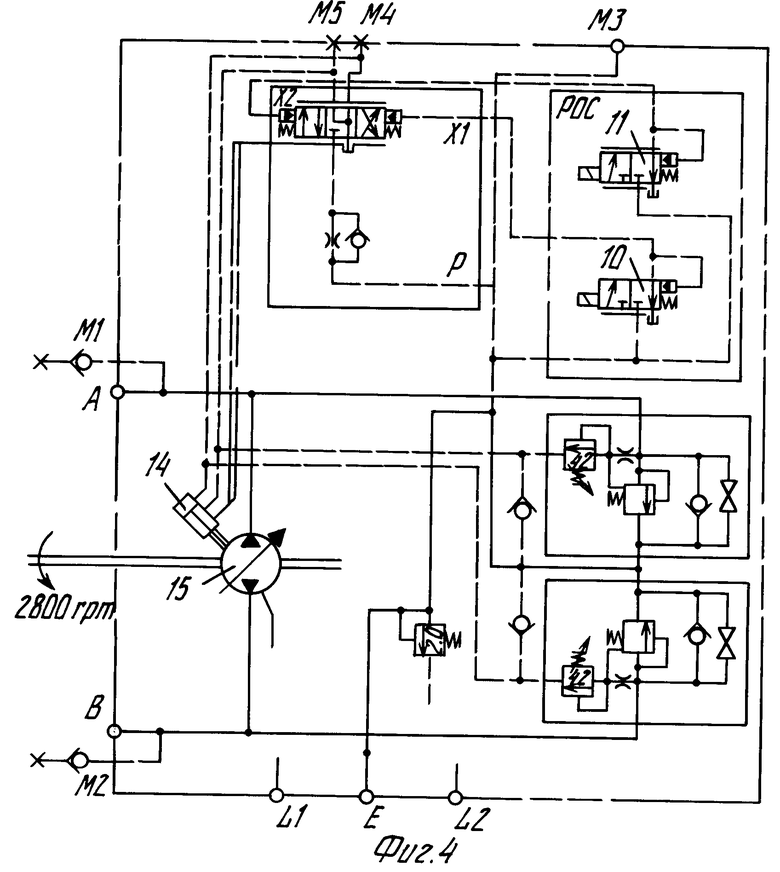
На фиг. 3 представлена диаграмма, показывающая увеличение тока по времени, т.е. крутизну характеристики ускорения/замедления, при этом верхняя кривая характеризует возможную наибольшую величину ускорения/замедления, а нижняя кривая демонстрирует ограниченную величину.
На фиг. 4 представлена гидравлическая схема привода катка, в которой гидравлический клапан 10 воздействует на клапан 13 для движения вперед и на клапан 11 для движения в обратном направлении. Давление жидкости от клапана 13 действует на сервомеханизм 14, который осуществляет настройку насоса 15, что указано ранее.
Изобретение не ограничено вышеупомянутым вариантом, показанном на чертежах, и может быть модифицировано в объеме приведенной формулы изобретения. Поэтому способ также может быть применен и к другим типам управляющих устройств и сервомеханизмам насоса, например пропорциональным клапанам на механическом сервомеханизме и тому подобному. Естественно, также могут быть использованы такие типы управляющих устройств, которые отличаются от указанных выше, например, ручки, головки, потенциометры.
Использование: для уплотнения асфальта. Сущность изобретения: уплотнение осуществляется путем повторяемых проходов по битумному покрытию, при котором скорость, ускорение и замедление катка, а также направление его движения вперед или назад выбираются рычагом управления, который через панель управления электрически действует на гидравлические клапаны, управляющие сервомеханизмом, который осуществляет воздействие на гидравлический насос, приводящий в движение ходовые моторы катка. 5 з.п. ф-лы, 4 ил.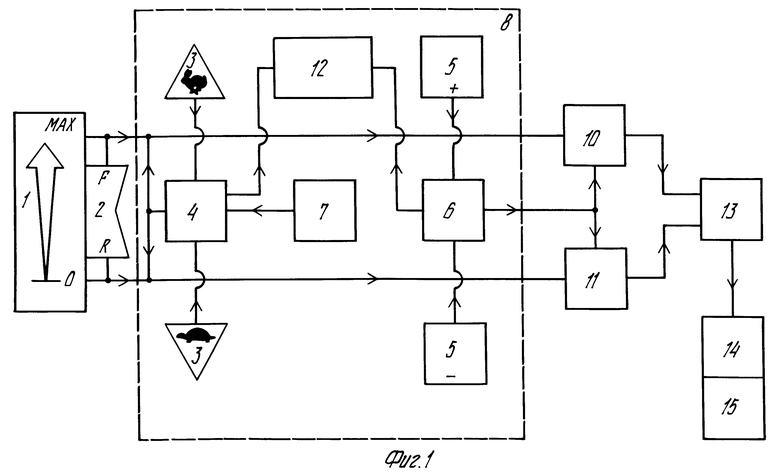
| US, патент, 4773217, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |

