Область техники, к которой относится изобретение
Настоящее изобретение относится к способу калибровки датчиков в системе, содержащей множество датчиков, которые расположены с возможностью действия на них одной и той же нагрузки. В частности, изобретение относится к калибровке датчиков одного типа, например датчиков давления в гидравлической системе рабочей машины (самоходной погрузочно-разгрузочной машины).
Изобретение будет описано ниже в отношении рабочей машины, представляющей собой колесный погрузчик. Это предпочтительный вариант применения, однако он никоим образом не ограничивает область применения изобретения. Изобретение может также применяться и для других типов рабочих машин (или рабочих транспортных средств), таких как автосамосвал, экскаватор-погрузчик, экскаватор или сельскохозяйственная машина, такая как трактор.
В системах со множеством датчиков часто существенными являются относительные величины, например, в случае перепада давлений или разности температур. Однако погрешности датчиков затрудняют или делают невозможным измерение малых различий величин, и при этом трудно добиться высокой точности измерений.
Высокую точность измерений можно получить, используя датчики с малыми погрешностями или в альтернативном варианте путем отдельной калибровки каждого датчика при его изготовлении. Обеспечение высокой точности датчиков влечет за собой их высокую стоимость. Отдельная калибровка датчиков при изготовлении требует времени и также влечет за собой увеличение стоимости. Кроме того, существует уход характеристик датчиков во времени, что приводит к необходимости регулярной калибровки.
Раскрытие изобретения
Первой целью изобретения является создание экономичного способа калибровки датчиков, который обеспечивает высокую точность в процессе работы системы.
Указанная цель достигается с помощью способа по п.1 формулы изобретения. Соответственно поставленная цель достигается путем независимого измерения (регистрации) уровня рабочего параметра для заданного уровня нагрузки по меньшей мере двумя из указанных датчиков, вычисления среднего значения рабочего параметра для указанных датчиков для заданного уровня нагрузки, определения отклонения от среднего значения для каждого из датчиков и сохранения величин отклонений для использования при работе системы.
Статистически вычисленное среднее значение является наиболее точным значением заданного уровня нагрузки и поэтому используется в качестве базовой величины для определения отклонения (смещения) при этом уровне нагрузки. В этом случае может быть получена более высокая точность по сравнению с точностью, которую могут обеспечить отдельные датчики. Чем больше датчиков используется для определения среднего значения, тем более высокая точность может быть получена. Более высокая точность создает условия для улучшения качества управления в процессе работы, в результате чего уменьшаются потери и, соответственно, снижается расход топлива. Кроме того, создаются условия для снижения стоимости компонентов системы и сокращения времени освоения производства.
Предпочтительно калибровка регулярно повторяется. При этом также при каждой калибровке обеспечивается проверка функционирования.
Предпочтительно изобретение применяется в гидравлической системе, обеспечивающей привод исполнительных механизмов (например, гидравлических цилиндров) в рабочей машине для выполнения различных функций. Такая система содержит, например, датчики давления для измерения давления нагрузки каждого из гидравлических цилиндров и датчики давления для измерения давления, связанного с давлением на выходе насоса.
Соответственно в гидравлической системе, в которой все или большая часть датчиков могут находиться под действием одного и того же давления, вычисляется среднее значение для всех датчиков, которые находятся под действием давления.
Гидравлическая система предпочтительно представляет собой систему с измерением нагрузки (регулируемый гидропривод). Это означает, что насос измеряет давление (сигнал измерения нагрузки) в задействованных гидравлических цилиндрах в процессе работы системы. Затем сигнал давления передается из датчиков давления. После этого насос устанавливает давление, которое на определенное число бар выше давлений в цилиндрах. Это приводит к притоку масла в цилиндры, степень которого зависит от степени открытия задействованного клапана управления.
В соответствии с другим предпочтительным вариантом способ включает нагружение датчиков на нескольких заданных уровнях, сохранение величин отклонений для каждого из датчиков для каждого уровня нагрузки и интерполирование величин отклонений для соответствующих датчиков в диапазоне между указанными уровнями. В этом случае с достаточной эффективностью может быть достигнута высокая точность во всем рабочем диапазоне. Например, для вычисления эффективного измерения датчика может использоваться линейная интерполяция между различными величинами смещения.
В соответствии с другим предпочтительным вариантом способ включает неоднократное повторение измерений рабочего параметра и определение среднего значения для каждой нагрузки путем усреднения средних значений, полученных в каждом цикле. За счет регулярного выполнения калибровки могут быть скомпенсированы уходы датчиков со временем. Кроме того, регулярная калибровка позволяет добиться более высокой точности системы (снижается влияние погрешностей отдельных датчиков).
Другие предпочтительные варианты осуществления изобретения и их достоинства станут понятными из формулы изобретения и нижеприведенного описания.
Краткое описание чертежей
Изобретение описывается ниже более подробно со ссылками на варианты его осуществления, представленные на прилагаемых чертежах, на которых показано:
на фиг.1 - вид сбоку колесного погрузчика;
на фиг.2 - один из вариантов системы для колесного погрузчика в соответствии с изобретением;
на фиг.3 - блок-схема осуществления способа калибровки датчиков в системе, представленной на фиг.2.
Осуществление изобретения
На фиг.1 приведен вид сбоку колесного погрузчика 101. Колесный погрузчик 101 имеет переднюю часть 102 и заднюю часть 103, каждая из которых содержит раму, и две ведущие оси 112, 113. В задней части 103 погрузчика находится кабина 114 оператора. Части 102, 103 погрузчика соединены между собой с возможностью поворота относительно друг друга вокруг вертикальной оси с помощью двух гидравлических цилиндров 104, 105, которые присоединены к частям 102, 103. Соответственно гидравлические цилиндры 104, 105 расположены с обеих сторон центральной линии в продольном направлении погрузчика для управления направлением движения или поворотом погрузчика.
Колесный погрузчик 101 снабжен механизмом 111 для погрузки/разгрузки объектов или материала. Механизм 111 содержит блок 106 грузовой стрелы и навесное рабочее орудие 107 в форме ковша, который установлен на блоке грузовой стрелы. Как показано на фиг.1, ковш 107 заполнен материалом 116. Первый конец блока грузовой стрелы 106 присоединен к передней части 102 погрузчика с возможностью поворота для обеспечения подъема ковша. Ковш 107 присоединен ко второму концу блока 106 грузовой стрелы с возможностью поворота для изменения наклона ковша.
Блок 106 грузовой стрелы может быть поднят и опущен относительно передней части 102 погрузчика с помощью двух гидравлических цилиндров 108, 109, каждый из которых присоединен одним своим концом к передней части 102 погрузчика и другим концом к блоку 106 грузовой стрелы. Ковш 107 может быть наклонен относительно блока 106 грузовой стрелы с помощью третьего гидравлического цилиндра 110, который присоединен одним своим концом к передней части 102 погрузчика и другим концом к ковшу 107 через систему соединительных звеньев и тяг.
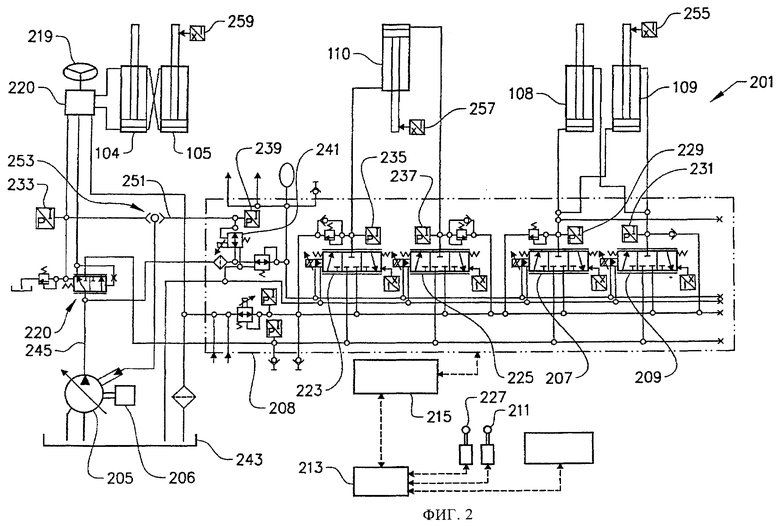
Первый вариант системы представлен на фиг.2. Система 201 содержит насос 205, предназначенный для подачи гидравлической жидкости под давлением в гидравлические цилиндры по гидравлической сети. Привод насоса 205 осуществляется от двигателя 206 погрузчика, в качестве которого используется дизельный двигатель. Насос 205 имеет переменный рабочий объем. Предпочтительно используется насос 205 с бесступенчатым регулированием. Система 201 содержит блок 208 клапанов (обозначен штрихпунктирными линиями), содержащий гидравлическую сеть с клапанами управления для управления функциями подъема и наклона ковша.
Два клапана управления, в форме регуляторов расхода 207, 209, расположены в гидравлической сети между насосом 205 и гидравлическими цилиндрами 108, 109 подъема для управления подъемом и опусканием ковша. Первый клапан 207 управления обеспечивает соединение насоса 205 со стороной поршня цилиндров, а второй клапан 209 управления обеспечивает соединение резервуара 243 со стороной штока поршня цилиндров. Кроме того, первый клапан 207 управления обеспечивает соединение резервуара 243 со стороной поршня, и соответственно второй клапан 209 управления обеспечивает соединение насоса 205 со стороной штока поршня. Такая схема обеспечивает широкие возможности управления. В частности, для выполнения функции совершенно необязательно одновременно подсоединять насос и резервуар.
Система 201 содержит также блок 213 управления (или компьютер), который содержит программное обеспечение для управления выполнением функций погрузчика. Блок управления также называется центральным блоком обработки или электронным управляющим модулем. Блок 213 управления предпочтительно содержит микропроцессор.
Блок 213 управления функционально соединен с органом 211 управления оператором в форме рукоятки управления подъемом. Блок 213 управления обеспечивает прием управляющих сигналов, вырабатываемых рукояткой управления подъемом, и приведение в действие соответствующих клапанов 207, 209 управления (через блок 215 управления клапанами). Блок 213 управления предпочтительно осуществляет более общее управление, а блок 215 управления клапанами осуществляет управление основными функциями блока 208 клапанов. Естественно, блоки 213, 215 управления могут быть объединены в один общий блок. При управлении насосом 205 обеспечивается приток масла в цилиндры 108, 109, степень которого зависит от степени открытия задействованных клапанов 207, 209.
Орган 219 управления оператором в форме рулевого колеса соединен гидравлически с цилиндрами 104, 105 через клапанный узел в форме полноповоротного устройства 220 для непосредственного управления цилиндрами.
Так же как и в случае функции подъема ковша, между насосом 205 и цилиндром 110 наклона расположены два клапана 223, 225 управления для управления движением вперед и назад навесного рабочего органа относительно блока грузовой стрелы. Блок 213 управления функционально соединен с органом 227 управления оператором в форме рукоятки управления наклоном. Блок 213 управления обеспечивает прием управляющих сигналов, вырабатываемых рукояткой управления наклоном, и приведение в действие соответствующих клапанов 223, 225 управления.
На выходной трубке 245 насоса расположен клапан 220 приоритета для автоматического обеспечения приоритета, заключающегося в том, что функция управления направлением движения погрузчика обеспечивается в первую очередь относительно функции подъема (и функции наклона).
В системе 201 измеряется нагрузка, для чего в ней используются датчики 229, 231, 233, 235, 237 давления для измерения давления, создаваемого нагрузкой, для каждой из вышеуказанных функций. Для обеспечения функции подъема ковша в системе используются два датчика 229, 231 давления, один из которых находится на трубке, идущей к стороне поршней цилиндров подъема ковша, а другой находится на трубке, идущей к стороне штоков поршней этих цилиндров. Аналогично, для обеспечения функции наклона ковша в системе используются два датчика 235, 237 давления, один из которых находится на трубке, идущей к стороне штока поршня цилиндра наклона ковша, а другой находится на трубке, идущей к стороне поршня этого цилиндра. Для обеспечения функции рулевого управления погрузчика в системе используется датчик 233 давления, установленный на трубке, идущей к цилиндрам 104, 105 рулевого управления. Точнее, датчик 233 давления находится на трубке измерения нагрузки, давление в которой равно давлению на стороне одного цилиндра, когда поворот осуществляется в одну сторону, и давлению на стороне другого цилиндра, когда поворот осуществляется в другую сторону. В нейтральном положении трубка измерения нагрузки соединяется с резервуаром.
В состав системы также входит клапан 241 с электрическим управлением, предназначенный для управления выходным давлением насоса с использованием гидравлического сигнала. Система 201 содержит дополнительный датчик 239 давления для измерения давления, которое является показателем выходного давления насоса. Точнее, датчик 239 давления предназначен для измерения давления в точке после клапана 241 с электрическим управлением. Соответственно датчик 239 давления измеряет непосредственно давление, создаваемое насосом, когда клапан 241 полностью открыт. В нормальном рабочем режиме датчик 239 давления измеряет давление, регулируемое клапаном 241. Соответственно блок 213 управления предназначен для приема сигнала из датчика 239 давления насоса, содержащего информацию об уровне давления.
Соответственно блок 213 управления принимает электрические сигналы из датчиков 229, 231, 233, 235, 237, 239 давления и вырабатывает электрический сигнал для приведения в действие клапана 241 с электрическим управлением.
Как уже указывалось, блок 213 управления предназначен для приема сигналов от рукояток 211, 227 управления. Если оператору нужно поднять ковш, он использует рукоятку 211 подъема. Блок управления принимает соответствующий сигнал от рукоятки 211 подъема и устанавливает клапаны 207, 209 управления в такое положение, в котором насос соединен со стороной поршней подъемных цилиндров 108, 109, а сторона штоков поршней подъемных цилиндров соединяется при этом с резервуаром 243. Кроме того, блок управления принимает сигналы от датчика 229 давления нагрузки на стороне поршней подъемных цилиндров и от датчика 239 давления на выходной стороне насоса. В соответствии с принятыми сигналами определяется необходимое давление насоса, превышающее измеренное давление нагрузки, и задействуется соответствующим образом клапан 241 с электрическим управлением.
Блок 213 управления предпочтительно обеспечивает согласование степени открытия клапанов 207, 209 управления и давления на выходе насоса 205 для оптимизации режима работы.
Функция наклона ковша обеспечивается аналогично функции подъема. При управлении направлением движения погрузчика датчик 233 давления в подсистеме рулевого управления измеряет давление нагрузки рулевого управления и вырабатывает соответствующий сигнал нагрузки. Блок 213 управления принимает сигнал нагрузки и сигнал от датчика 239 давления на выходе клапана 241 с электрическим управлением. В соответствии с принятыми сигналами определяется необходимое давление насоса, превышающее измеренное давление нагрузки, и задействуется соответствующим образом клапан 241 с электрическим управлением.
Если одновременно задействуется несколько функций, то измеренные давления нагрузки сравниваются, и на насос 205 подается сигнал управления, соответствующий самому высокому давлению нагрузки.
Соответственно клапан 241 с электрическим управлением устроен таким образом, чтобы его можно было переводить между двумя крайними положениями: первое крайнее положение соответствует минимальному давлению насоса и второе крайнее положение соответствует максимальному давлению.
На трубке 251 между клапаном 241 с электрическим управлением и насосом расположено гидравлическое устройство 253, в форме реверсивного клапана. Реверсивный клапан 253 обеспечивает прием гидравлических сигналов от рулевого управления и от клапана 241 управления насосом. Реверсивный клапан предназначен для управления насосом 205 в соответствии с принятым сигналом, соответствующим наибольшему давлению нагрузки. Соответственно гидравлическое устройство (реверсивный клапан) 253 выбирает наибольшее давление в выходном сигнале, составленном из двух входных сигналов давления.
В состав системы входит также датчик 255 для измерения положения подъемного цилиндра. Датчик 255 функционально подсоединен к блоку 213 управления. В этом случае блок 213 управления может определять, осуществляется ли подъем или опускание груза.
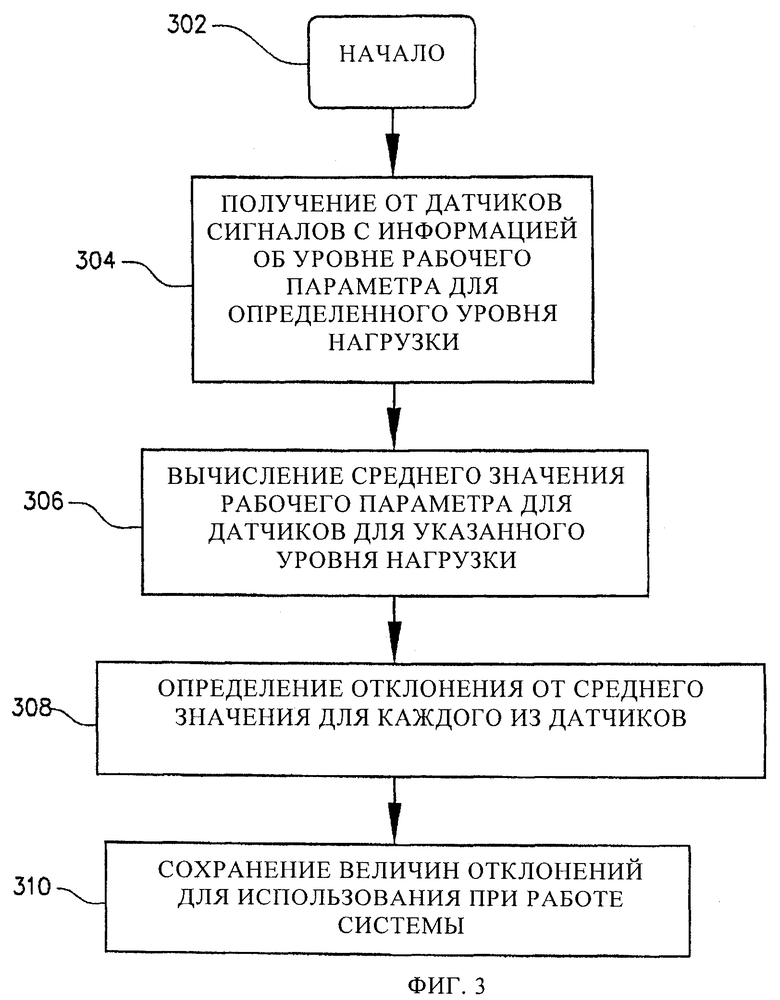
На фиг.3 представлен пример способа калибровки датчиков в системе, содержащей датчики 229, 231, 233, 235, 237, 239, 261, 263, которые расположены таким образом, что на них может действовать одна и та же нагрузка. Предпочтительно используются датчики одного типа, а именно имеющие по существу одну конструкцию или датчики одной модели. Способ предпочтительно осуществляется с достаточно большим количеством датчиков, предпочтительно не менее четырех. В соответствии с настоящим примером способ осуществляют на вышеописанной гидравлической системе 201.
Поскольку первые клапаны 207, 225 управления подсоединены к патрубкам на стороне поршней и вторые клапаны 209, 223 управления подсоединены к патрубкам на стороне штоков поршней гидравлических цилиндров 108, 109, 110 для подъема и наклона ковша соответственно, то давление может действовать на датчики 229, 231, 235, 237 давления без необходимости протекания потока через указанные патрубки.
Осуществление способа начинается в блоке 302 представленной схемы. Предпочтительно датчики измеряют уровень рабочего параметра для определенного уровня нагрузки одновременно и независимо друг от друга. Блок 213 управления принимает сигналы от датчиков, содержащие информацию об уровне рабочего параметра для указанного уровня нагрузки (блок 304). Затем вычисляется среднее значение рабочего параметра, измеренного датчиками для указанного уровня нагрузки (блок 306). Затем для каждого из датчиков определяется отклонение от среднего значения (блок 308). Соответственно отклонение определяется как разность между абсолютным значением, измеренным датчиком, и средним значением. Полученные величины отклонений сохраняются для дальнейшего использования в работе системы (блок 310). Указанное использование в работе системы означает корректировку величины, измеренной датчиком в процессе работы. Соответственно когда принимается входной сигнал от датчика, то отклонение добавляется к значению, полученному от датчика (или вычитается из него).
В соответствии с предпочтительным вариантом способ включает нагружение датчиков на первом заданном уровне. Это предпочтительно осуществляется подачей давления в систему насосом 205. Насос 205 повышает давление до заданного значения, лучше всего до максимального давления, предпочтительно скачкообразно.
Калибровку предпочтительно повторяют в автоматическом режиме по меньшей мере один раз в одном сеансе работы системы. В частности, вышеуказанные действия выполняются автоматически при запуске системы. В соответствии с другим вариантом способ включает выполнение вышеуказанных действий в соответствии с сигналом запуска, поступающим из органа управления оператором, связанного с калибровкой. В этом случае калибровка запускается оператором, и при этом целесообразно использовать несколько уровней давления, если это допускает система.
В соответствии с другим предпочтительным вариантом способ включает нагружение датчиков на нескольких заданных уровнях, сохранение величин отклонений для каждого из датчиков для каждого уровня нагрузки и интерполирование величин отклонений для соответствующих датчиков в пределах диапазона между указанными уровнями. Таким образом, в соответствии с последним вариантом величины для датчиков сохраняются для нескольких уровней давления. Предпочтительно это выполняется при условии, что принимаются меры по предотвращению возможных конфликтов с давлениями нагрузки тормозов, стояночного тормоза, вентилятора охлаждении и т.п.
В соответствии с другим предпочтительным вариантом способ включает определение нахождения уровня измеряемого рабочего параметра для каждого датчика в пределах допустимых отклонений и использование уровня в определении средней величины только в том случае, когда этот уровень находится в пределах допустимых отклонений. Соответственно когда вычисляется среднее значение, то измерения датчиков, которые выходят за пределы допустимого отклонения (например, 3%) от среднего значения, игнорируются. В предпочтительном варианте если для конкретного датчика измеренное значение выходит за пределы допуска, то вырабатывается сообщение ошибки.
В соответствии с другим предпочтительным вариантом способ включает многократное повторение вышеуказанных шагов и определение среднего значения для каждой нагрузки путем усреднения средних значений, полученных в каждом цикле. Таким образом, может быть достигнута высокая степень точности. Например, датчики нагружаются последовательно, а именно несколько раз на нескольких заданных уровнях.
Настоящее описание относится к датчикам давления в гидравлических системах, однако изложенные принципы могут быть аналогичным образом применены к датчикам давления в других системах (воздушных, водяных и др.), а также к датчикам температуры, в системах с несколькими датчиками.
Изобретение не должно считаться ограниченным вышеописанными вариантами его осуществления, более того, в пределах объема изобретения, определяемого прилагаемой формулой, могут быть также предложены и другие варианты и их модификации. В частности, предпочтительные варианты могут быть использованы совместно различными путями.
Изобретение относится к калибровке датчиков в системе, содержащей множество датчиков, которые расположены с возможностью действия на них одной и той же нагрузки. Техническим результатом является экономичный способ калибровки датчиков, который обеспечивает высокую точность в процессе работы системы. Способ калибровки датчиков в системе, содержащей датчики, предназначенные для измерения нагрузок, включает шаги, на которых обеспечивают: независимое измерение уровня рабочего параметра для заданного уровня нагрузки с использованием по меньшей мере двух из указанных датчиков, вычисление среднего значения рабочего параметра для указанных датчиков для заданного уровня нагрузки, определение отклонения от среднего значения для каждого из датчиков и сохранение величин отклонений для использования при работе системы. Осуществляют нагружение датчиков на нескольких заданных уровнях нагрузки, сохраняют величины отклонений для каждого из датчиков для каждого уровня нагрузки и производят интерполяцию величин отклонений соответствующих датчиков в интервале между двумя уровнями. 15 з.п. ф-лы, 3 ил.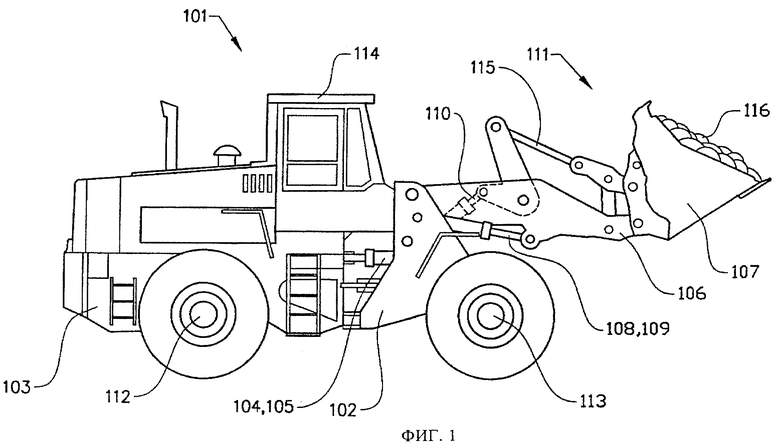
1. Способ калибровки датчиков в системе (201), содержащей датчики (229, 231, 233, 235, 237, 239, 261, 263), предназначенные для измерения нагрузок при выполнении различных функций системы и размещенные с возможностью воздействия на них одной и той же нагрузки при выполнении калибровки, причем способ включает шаги, на которых обеспечивают: независимое измерение уровня рабочего параметра для заданного уровня нагрузки с использованием по меньшей мере двух из указанных датчиков; вычисление среднего значения рабочего параметра для указанных датчиков для заданного уровня нагрузки; определение отклонения от среднего значения для каждого из датчиков; и сохранение величин отклонений для использования при работе системы, причем осуществляют нагружение датчиков на нескольких заданных уровнях нагрузки, сохранение величин отклонений для каждого из датчиков для каждого уровня нагрузки и интерполяцию величин отклонений соответствующих датчиков в интервале между двумя уровнями.
2. Способ по п.1, включающий шаг, на котором обеспечивают нагружение датчиков на первом заданном уровне.
3. Способ по п.2, где система предназначена для работы под давлением и нагрузка представляет собой давление.
4. Способ по любому из предыдущих пунктов, включающий шаг, на котором определяют, находится ли уровень измеряемого рабочего параметра для каждого датчика в пределах допустимых отклонений, и используют этот уровень в определении средней величины только в том случае, когда он находится в пределах допустимых отклонений.
5. Способ по п.1, включающий шаг, на котором обеспечивают независимое измерение уровня рабочего параметра для заданного уровня нагрузки по меньшей мере четырьмя из указанных датчиков.
6. Способ по п.1, включающий шаг, на котором определяют отклонение как разницу между абсолютным значением, измеренным датчиком, и средним значением.
7. Способ по п.1, включающий шаг повторения циклов измерений рабочего параметра и определение среднего значения для каждой нагрузки путем усреднения средних значений, полученных в каждом цикле.
8. Способ по п.7, в котором повторяют указанные шаги в автоматическом режиме по меньшей мере один раз за один сеанс работы системы.
9. Способ по п.1, в котором указанные шаги выполняют в автоматическом режиме при запуске системы.
10. Способ по п.1, в котором указанные шаги выполняют в соответствии с сигналом запуска, поступающего из органа управления оператором, связанного с калибровкой.
11. Способ по п.1, в котором указанные шаги выполняют при максимальной нагрузке.
12. Способ по п.1, в котором рабочий параметр представляет собой давление.
13. Способ по п.1, в котором система представляет собой гидравлическую систему (201) для рабочей машины (101) и рабочий параметр связан с ней.
14. Способ по п.13, в котором обеспечивают создание заданной нагрузки путем скачкообразного повышения давления насосом (205), входящим в состав гидравлической системы, до заданного давления.
15. Способ по п.1, в котором первый (229, 231, 233, 235) из указанных датчиков предназначен для измерения давления в первом гидравлическом цилиндре (108, 109, 110).
16. Способ по п.1, в котором используют датчики одного типа.
| JP 10227655 A, 25.08.1998 | |||
| DE 19506388 C1, 22.08.1996 | |||
| US 2003139860 A1, 24.07.2003 | |||
| US 2003216879 A1, 20.11.2003 | |||
| US 2005199051 A1, 15.09.2005 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ КАЛИБРОВКИ ДАТЧИКА ДАВЛЕНИЯ | 2001 |
|
RU2260142C2 |
| Способ динамической калибровки датчика давления и устройство для его осуществления | 1983 |
|
SU1091046A1 |

