Настоящее изобретение относится к схемной конфигурации, которая предназначена для тормозной системы с антиблокировочным управлением и/или управлением проскальзыванием при тяговом усилии, которая содержит схемы формирования сигналов датчиков, представляющих характер вращения отдельных колес транспортного средства, включающие схемы контроллеров для анализа и обработки сформированных сигналов датчиков и для создания сигналов управления тормозным давлением, которые управляют соленоидными клапанами, встроенными в трубопроводы текучей среды, находящейся в под давлением тормозной системы, содержащие схемы управления, на которые могут быть поданы сформированные сигналы датчиков и которые, в случае неисправности, частично или полностью отклоняются или разъединяются схемой управления, а также включающие схемы для сигналов обмена и сравнения схем контроллеров соответствующими сигналами схем мониторинга.
Конфигурация схемы управления и мониторинга (текущего контроля) антиблокировочной системой известна уже из патентного описания DE 324637 C2. Согласно указанному патенту сформированные сигналы датчиков колес анализируются и обрабатываются параллельно в двух совершенно идентичных микроконтроллерах, которые работают согласно одной и той же программе и на которые подаются сформированные сигналы датчиков. Выходные сигналы двух микроконтроллеров и внутренние сигналы или промежуточные результаты переставляют и сравнивают. Поскольку два контроллера имеют на входе одни и те же сигналы датчиков, внутренние и внешние сигналы должны при неповрежденной системе совпадать. Этот критерий оценивается для мониторинга системы. При обнаружении несовпадения частично или полностью отключают антиблокировочное управление.
Подобная система требует двух высококачественных микроконтроллеров, хотя для генерирования реальных сигналов управления тормозным давлением может быть достаточен один одиночный микроконтроллер. Следовательно, количество микроконтроллеров согласно этому патенту удваивается для обеспечения надежности.
Антиблокировочная система известна из опубликованной патентной заявки DE 29 28 981 A1, которая содержит по меньшей мере один управляющий микрокомпьютер и еще один микрокомпьютер для тестирования и контроля за каналами управления. С помощью этого тестового микрокомпьютера генерируются тестовые сигналы и они выдаются в каналы управления через входные схемы, принадлежащие управляющим микрокомпьютерам. Операции управления моделируются тестовыми сигналами и воспринимается реакция управляющего компьютера на эти смоделированные сигналы. Предварительным условием для тестовых операций является отсутствие торможения с антиблокировочным управлением и превышение транспортным средством заранее определенной величины порога скорости. Кроме того, для обнаружения ошибок во время торможения, тестовый микрокомпьютер проверяет длительность некоторых сигналов управления и некоторых сигналов, управляющих клапанами для сохранения предельных значений. Наконец, обеспечивается автоматический контроль микрокомпьютера.
Несмотря на относительно большие затраты, подобное устройство позволяет обнаруживать лишь специфические ошибки или типы ошибок, поскольку, в отличие от системы, описанной выше, избыточный сигнал, обрабатываемый вместе со сравнением избыточно обрабатываемых сигналов на совпадение, не выполняется.
В основу настоящего изобретения положена задача разработки ABS-системы или TSC-системы, которой присущи многосторонность и надежность обнаружения ошибок системы, которая базируется на обработке избыточных сигналов и отключении управления в случае несовпадение избыточно обрабатываемых сигналов, и которая относительно проста в изготовлении.
Поставленная задача решается тем, что в тормозной системе упомянутого типа, согласно изобретению, схема мониторинга состоит преимущественно из схем для формирования скорости или схем для генерирования сигналов, выводимых из скорости колес, таких как сигналы замедления и сигналы торможения, сигналы рывков, опорные сигналы и т.д., а также из схем для упрощенного воспроизведения управляющих алгоритмов стратегии управления соответственно, в частности, для определения фаз управления, которые получают при анализе выведенных сигналов согласно алгоритмам схем контроллера и схем корреляции выходных сигналов, схем воспроизведения стратегии управления с управляющими сигналами тормозного давления.
Таким образом, в соответствии с настоящим изобретением сформированные сигналы датчиков обрабатывают избыточно в параллель, независимо друг от друга, в схеме контроллера и в схеме мониторинга, а именно, так что возможна передача и сравнение сигналов, обработанных в схемах мониторинга в сравнении со схемами мониторинга. Обработка данных в схемах мониторинга в сравнении со схемами контроллера может быть значительно упрощена без риска усложнить обнаружение ошибок. Например, достаточно сформировать скорости в схемах мониторинга таким образом, что в сравнении с соответствующими сигналами схем контроллера отчетливо обнаруживалось бы, находятся ли сигналы сформированной скорости в пределах заранее определенных диапазонов допусков. Это справедливо и в случае генерирования и сравнения выводимых сигналов, а именно сигналов ускорения, опорных сигналов и т.д. Для настоящего изобретения существенным является "проведение" стратегии управления, которая используется для обработки полученных сигналов в схемах мониторинга. Проведение такой стратегии управления или соответственно алгоритмов управления, с помощью которой управляющие сигналы тормозного давления точно определяются в схемах контроллера посредством привлечения больших затрат на вычисления с учетом большого количества входных данных, критериев фильтра и т.д., имеет сравнительно простую структуру. В частности, фазы управления определяются схемами, представляющими эту стратегию с помощью анализа полученных сигналов согласно принципиально тем же самым управляющим параметрам, которые применяются также для основных принципов управления схем контроллера. Ошибки в системе, то есть в схемах контроллера и/или в схемах мониторинга, могут быть распознаны с помощью корреляции выходных сигналов этих схем воспроизведения с управляющими сигналами реального тормозного давления с анализом этих сигналов в рамках циклов управления, которые не являются принципиальными. С помощью описанного упрощения схем мониторинга становится возможным использование высокопроизводительного микроконтроллера, например, 16-битового микроконтроллера, для управления, но и использование намного менее дорогого 8-битового микроконтроллера для мониторинга.
Предпочтительно варианты осуществления настоящего изобретения в прилагаемых подпунктах формулы изобретения. Например, один из вариантов осуществления настоящего изобретения заключается в том, что схемы для обмена и сравнения сигналов микроконтроллера мониторинга и схем корреляции сигналов возбуждения клапанов с сигналами схем воспроизведения являются интегральными компонентами управляющего микроконтроллера и микроконтроллера мониторинга.
Другой вариант осуществления настоящего изобретения заключается в том, что управляющий микроконтроллер и/или микроконтроллер мониторинга снабжены дополнительными схемами для контроля и сравнения сигналов скорости, полученных (извлеченных) сигналов, фаз управления, интервалов возбуждения клапанов и т.д., соответствующих критериям правдоподобности.
Наконец, согласно еще одному варианту осуществления изобретения анализ и обработка данных продолжается в схемах мониторинга на основе тех данных, которые взяты из схем контроллера и проверены на сохранение допусков посредством сравнения с соответствующими данными схем мониторинга.
На фиг. 1 изображена блок-схема наиболее важных элементов схемы в соответствии с настоящим изобретением; на фиг.2 - расширение конфигурации схемы согласно фиг.1; на фиг.3 - упрощенная блок-схема алгоритма для пояснения режима функционирования схемы в соответствии с настоящим изобретением.
В соответствии с фиг.1 схема тормозной системы согласно настоящему изобретению содержит триггер 1 или соответственно схемную конструкцию для формирования сигналов датчиков, управляющий микроконтроллер RMC (2), микроконтроллер мониторинга  (3) и конечный каскад 4, к выходам которого подключены электрически управляемые гидравлические клапаны 5. Блок клапанов, обозначаемый в дальнейшем индексом "5", может состоять из антиблокировочной системы (ABS) со схемой управления, состоящей из четырех впускных клапанов и четырех выпускных клапанов, предусмотренных отдельно для каждого колеса.
(3) и конечный каскад 4, к выходам которого подключены электрически управляемые гидравлические клапаны 5. Блок клапанов, обозначаемый в дальнейшем индексом "5", может состоять из антиблокировочной системы (ABS) со схемой управления, состоящей из четырех впускных клапанов и четырех выпускных клапанов, предусмотренных отдельно для каждого колеса.
Сигналы датчиков от S1 до S4 четырех колес подаются на входы триггера 1. В целом, датчики колес вырабатывают переменный сигнал, частота которого пропорциональна скорости колеса. Соответствующий сигнал в виде меандра или последовательности импульсов преобладает на выходе триггера 1.
Следовательно, контроллерные схемы 2 и схемы мониторинга 3 реализованы в настоящем варианте осуществления посредством микроконтроллеров RMC 2  3 соответственно. С этой целью для генерирования сигналов управления тормозным давлением и сигналов управления клапанами соответственно используется сравнительно сложный высокопроизводительный микроконтроллер 2, а именно, 16-битовый микроконтроллер. С другой стороны, 8-битовый микроконтроллер
3 соответственно. С этой целью для генерирования сигналов управления тормозным давлением и сигналов управления клапанами соответственно используется сравнительно сложный высокопроизводительный микроконтроллер 2, а именно, 16-битовый микроконтроллер. С другой стороны, 8-битовый микроконтроллер  3 достаточен для независимой обработки данных в микроконтроллере мониторинга, служащего для обнаружения ошибок, хотя сформированные сигналы датчиков обрабатываются в обоих микроконтроллерах, в основном, аналогично, и таким образом, что данные индивидуальных обрабатывающих ступеней можно применять друг с другом и - с целью обнаружения ошибок - сравнивать на совпадение. Несмотря на использование различных микроконтроллеров, широко избыточная обработка сформированных сигналов датчиков производится в схемах контроллера и схемах мониторинга. Упрощение и уменьшение расходов по сравнению с обычными системами с двумя подобными микропроцессорами достигается прежде всего посредством ограничения сигналами, существенными для управления, посредством ограничения "диапазонами допусков", внутри которых должны находиться сравниваемые данные в свободной от неисправностей системе, и посредством определения "воспроизводства" основных принципов управления. Главным образом, это воспроизводство связано теми же критериями и параметрами управления, например, проскальзыванием, ускорением, замедлением и т.д. и с алгоритмами, соответствующими основным принципам управления.
3 достаточен для независимой обработки данных в микроконтроллере мониторинга, служащего для обнаружения ошибок, хотя сформированные сигналы датчиков обрабатываются в обоих микроконтроллерах, в основном, аналогично, и таким образом, что данные индивидуальных обрабатывающих ступеней можно применять друг с другом и - с целью обнаружения ошибок - сравнивать на совпадение. Несмотря на использование различных микроконтроллеров, широко избыточная обработка сформированных сигналов датчиков производится в схемах контроллера и схемах мониторинга. Упрощение и уменьшение расходов по сравнению с обычными системами с двумя подобными микропроцессорами достигается прежде всего посредством ограничения сигналами, существенными для управления, посредством ограничения "диапазонами допусков", внутри которых должны находиться сравниваемые данные в свободной от неисправностей системе, и посредством определения "воспроизводства" основных принципов управления. Главным образом, это воспроизводство связано теми же критериями и параметрами управления, например, проскальзыванием, ускорением, замедлением и т.д. и с алгоритмами, соответствующими основным принципам управления.
Воспроизводство основных принципов управления ограничено выяснением или обнаружением фаз управления в варианте осуществления настоящего изобретения. Можно установить с большой точностью посредством корреляции фаз управления, определенных в микроконтроллере мониторинга с сигналами управления клапанами или соответственно из позиций переключателей индивидуальных клапанов, находится ли система в исправном состоянии или имеется неисправность. В случае воспроизводства основных принципов управления обходятся без разложения циклов управления, точного вычисления частоты импульсов, точного измерения размера увеличения давления и т. д. Также не требуются для наблюдения за функционированием другие сложные (усложненные) вычислительные операции, которые в управляющих системах служат для фильтрации сигналов, для линеаризации увеличения давления и уменьшения давления, для формирования эталона давления и т.д. Без этих вычислительных схем или шагов, занимающих на практике значительный объем, можно обойтись, не снижая надежности обнаружения ошибок.
В соответствии с фиг.1 сформированные сигналы датчиков в двух контроллерах 2 и 3 вначале обрабатываются параллельно в схемах 6 и 7 формирования скорости соответственно. Соответственно получают сигналы данных, отображающие скорости отдельных колес. С помощью схем передачи данных, схем обмена данными и схем 8 и 9 компаратора определяется, являются ли избыточно полученные сигналы скорости колес совпадающими. В предпочтительном варианте осуществления настоящего изобретения диапазоны допусков взяты в качестве основы для компаратора, это означает, что надлежащее функционирование берут для надежности, когда соответствующие значения скорости находятся в заранее заданном диапазоне допусков. Если это условие выполняется в соответствии с еще одним вариантом осуществления настоящего изобретения, обработка сигналов и обработка данных соответственно может быть продолжена в микроконтроллере мониторинга на базе тех данных, которые были получены в управляющем микроконтроллере и попали в микрокомпьютер 3 мониторинга в результате обмена данными. Это является преимуществом, если, например, формирование скорости в микроконтроллере 2 управления выполняется с большей точностью или более высоким разрешением, чем в микроконтроллере мониторинга.
После формирования скорости следует определение получаемых сигналов, требуемых для управления, в частности, сигналов ускорения и сигналов замедления, опорной скорости транспортного средства, если требуется, сигналов рывков и т.д., в обоих микроконтроллерах 2, 3 в схемах 10, 11. Совпадение этих полученных сигналов контролируется посредством обмена и сравнения данных схемами 8 и 9, и снова диапазоны допусков могут быть сделаны их базой. Возможна также дальнейшая обработка данных в микропроцессоре 3 мониторинга на основе передачи данных.
На базе этих полученных сигналов изменение тормозного давления и соответственно включение тормозов, требуемое для антиблокировочного управления или управления проскальзыванием при тяговом усилии, теперь определяется в соответствии с разнообразными алгоритмами управления, которые классифицируются общим термином "стратегия управления" (общие принципы управления). Расходы на вычислительные операции, имеющиеся в этот момент с учетом большого числа величин, имеют решающее значение для качества управляющей системы. Результаты этих вычислительных операций, которые выполняются в схеме или схемном блоке 12, в конечном итоге приводят к оценке интервалов возбуждения отдельных управляющих клапанов тормозного давления, а именно, известных впускных клапанов тормозного давления и выпускных клапанов, Интервалы возбуждения клапанов определяются в схеме 13 управляющего микроконтроллера 2. Наконец, активизируются соленоидные клапаны 5 или управляющие клапаны тормозного давления посредством выходных сигналов этой схемы 13 через конечную ступень 4.
Вместо усложненных вычислений стратегий управления в блоке 12 управляющего микроконтроллера 2 выполняется лишь "воспроизведение" стратегии управления в схеме 14 в микроконтроллере 3 мониторинга. Схема 14 определяет мгновенную фазу управления из полученных сигналов, которые определены в схеме 11. В варианте осуществления схемы антиблокировочной системы согласно изобретению определяют шесть различных фаз, из которых фаза 0 характеризует условия за пределами управления, фаза 1 управления характеризует вход колеса в нестабильный диапазон, фаза 2 - характеризует нестабильные условия колеса, фаза 3 - характеризует возвращение стабильности, фаза 4 - характеризует переход колеса из нестабильного в стабильный диапазон управления и, наконец, фаза 5 характеризует временной диапазон, в котором находится скорость колеса над так называемой опорной скоростью транспортного средства. Ограниченная меньшими управляющими фазами или еще более точная классификация вполне возможна. На практике функции ошибок можно с большой надежностью распознать посредством корреляции управляющих фаз, определенных с помощью воспроизведения 14 стратегии управления, с реальными сигналами возбуждения клапанов, вырабатываемыми схемой 13 управляющего микроконтроллера 2. Точное разрешение сигналов возбуждения клапанов, например, длительность и число отдельных импульсов возрастания давления во время конкретной фазы, и т.д., не является необходимым для обнаружения ошибок. Эта корреляция фаз управления с сигналами возбуждения клапанов выполняется в схеме 15 микроконтроллера 3 мониторинга.
Реакция конечной ступени 4 на сигналы возбуждения клапанов подается обратно на схемы передачи данных и компараторов 8, 9 двух микроконтроллеров 2, 3 в варианте осуществления в соответствии с фиг.1. Эта последовательность блоков, а также конечная ступень 4, включены в мониторинг.
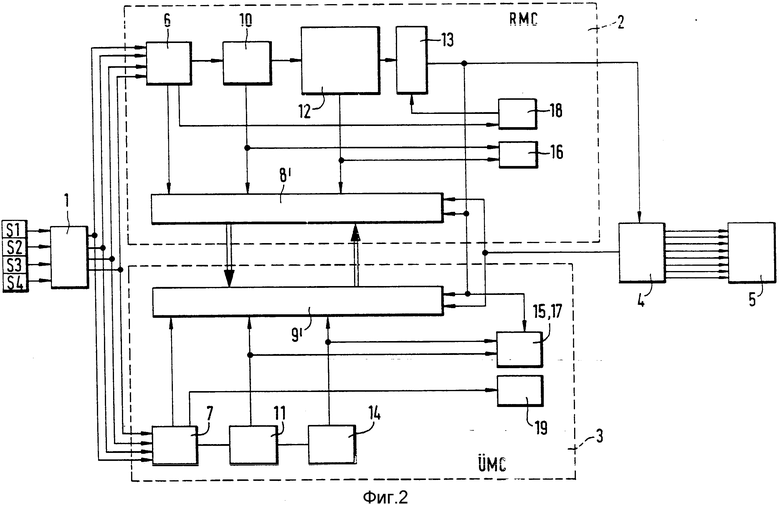
Конфигурация схемы в соответствии с фиг.2 отличается от варианта осуществления, описанного выше, лишь некоторыми дополнительными схемами и функциями мониторинга. Как в управляющем микроконтроллере 2, так и в микроконтроллере 3 мониторинга полученные сигналы - независимые друг от друга - проверяются на "правдоподобность" по отношению друг к другу и/или по отношению к данным, обнаруженным посредством блока 12 стратегии управления или соответственно с помощью устройства воспроизведения 14. В случае, когда найденная комбинация сигналов является противоречивой или физически неосуществимой, это указывает на ошибку; в этом случае инициируется частично или временно ограниченное выключение управления или полное разъединение способом, который не показан. На фиг.2 схемы для контроля правдоподобности обозначены позицией 16 в управляющем микроконтроллере и позицией 17 в микроконтроллере мониторинга.
Кроме того, в варианте осуществления (в соответствии с фиг.2) создается тестовый сигнал, генерируемый схемой 18, которая вырабатывает тестовые сигналы клапанов посредством схемы 13 возбуждения клапанов, настолько малой длительности, что, предположительно, они не вызывают реакции клапанов, но позволяют обнаруживать ошибки на пути сигнала. Генератор 18 тестовых сигналов интегрирован в управляющий микроконтроллер RMC в варианте осуществления в соответствии с фиг.2.
Схема 18 и соответствующая схема 19, которая интегрирована в микроконтроллер 3 мониторинга, имеет выходные сигналы схемы формирования скорости 6 и 7 соответственно. Среди других эти схемы 18, 19 служат для избыточного контроля входных схем, в частности триггера 1, и косвенно датчиков от S1 до S4 колес. Данный контроль осуществляется постольку, поскольку информация короткозамкнутой цепи или прерывания цепи между датчиками колес и триггером 1 передается в схемы формирования скорости 6 и 7 соответственно в форме низкочастотных колебаний или постоянного сигнала. Такие и другие ошибки обнаруживаются в дальнейшем посредством схем 18, 19 и приводят к деактивизации или разъединению управления.
Согласно фиг.2 выходные сигналы схем 13 возбуждения клапанов подаются на схемы 8, 9 передачи данных и компаратора. Далее сигналы активизации и клапанов, подаваемые в обратном направлении через конечную ступень 4, сравниваются в этих двух схемах 8, 9 с сигналами возбуждения клапанов схемы 13 на совпадение. Кроме того, сигналы возбуждения клапанов и сигналы активизации клапанов меняются друг с другом через схемы 8, 9. В случае несовпадения сигналов деактивизация или разъединение управления также инициируется непосредственно этими схемами.
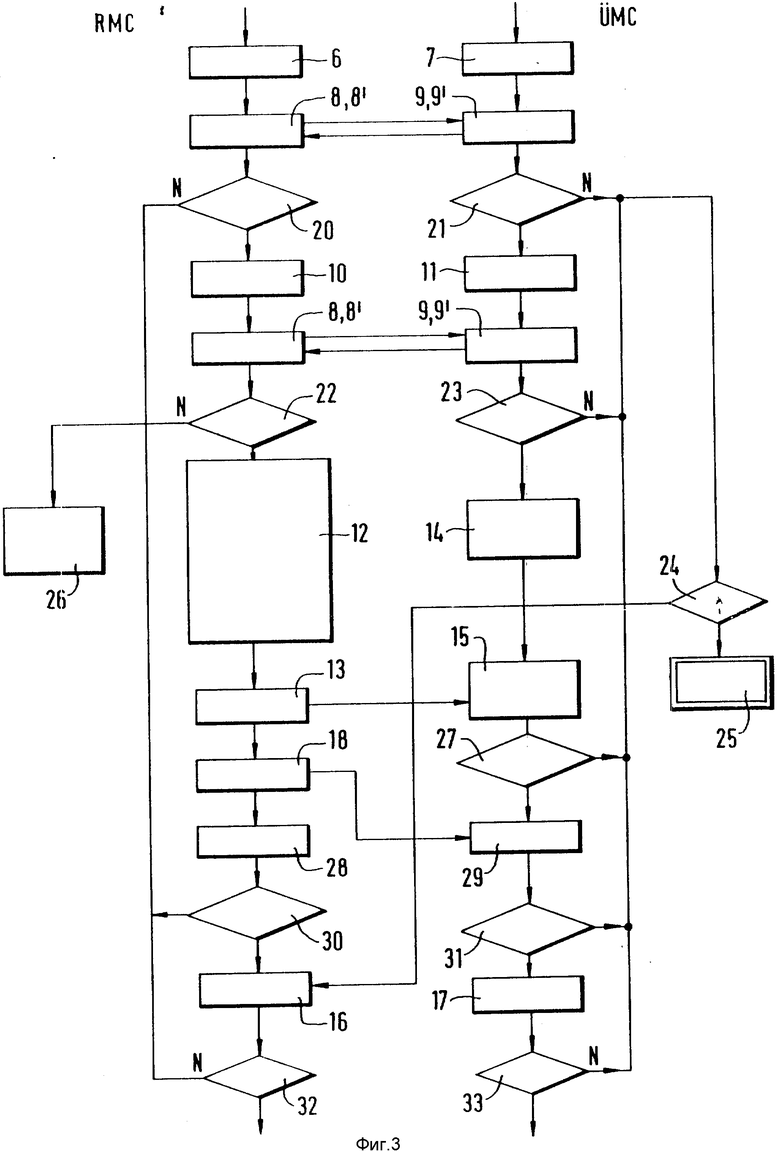
Режим функционирования схемы в соответствии с настоящим изобретением, которая в значительной степени соответствует варианту осуществления в соответствии с фиг.2, далее поясняется с помощью блок-схемы алгоритма в соответствии с фиг. 3. При этом по мере возможности используются номера позиций одни те же, что и на фиг.1 и 2.
В управляющем микроконтроллере RMC 2 и микроконтроллере  3 мониторинга данные о скорости колес, полученные в схемах или функциональных блоках 6, 7 независимо друг от друга, обмениваются через схемы 8, 9 и 8', 9' передатчика данных и компаратора и сравниваются на совпадение. Если данные находятся "в пределах диапазонов допусков", выводимые сигналы (проскальзывания, ускорения и замедления и т.д.) формируются независимо друг от друга в схемах 10 и 11. За обменом данных через схемы 8, 9 и 8', 9' соответственно следует вычисление в блоке 12 стратегии управления или соответственно в схеме 14 воспроизведения. Из фиг.3 видно, что "стратегия управления" предусматривает, помимо прочего, фазовое распознавание, различные алгоритмы модификации давления, применение критерием выбора, таких как выделение низкого, и ограничение качания крутящего момента (GMB). Схема воспроизведения стратегии управления 14 может быть ограничена схемой распознавания фаз управления.
3 мониторинга данные о скорости колес, полученные в схемах или функциональных блоках 6, 7 независимо друг от друга, обмениваются через схемы 8, 9 и 8', 9' передатчика данных и компаратора и сравниваются на совпадение. Если данные находятся "в пределах диапазонов допусков", выводимые сигналы (проскальзывания, ускорения и замедления и т.д.) формируются независимо друг от друга в схемах 10 и 11. За обменом данных через схемы 8, 9 и 8', 9' соответственно следует вычисление в блоке 12 стратегии управления или соответственно в схеме 14 воспроизведения. Из фиг.3 видно, что "стратегия управления" предусматривает, помимо прочего, фазовое распознавание, различные алгоритмы модификации давления, применение критерием выбора, таких как выделение низкого, и ограничение качания крутящего момента (GMB). Схема воспроизведения стратегии управления 14 может быть ограничена схемой распознавания фаз управления.
Точки 20, 21, 22, 23 ответвления в потоке данных приводят к деактивизации 24 или даже разъединению при тяговом усилии антиблокировочного управления или управления проскальзыванием при тяговом усилии, если обмениваемые сигналы не совпадают или соответственно находятся вне заранее определенных диапазонов допусков. Функциональный блок 26 фиксирует, что при появлении несовпадения, обнаруживаемого точками 20 или 21 ответвления, или в случае превышения диапазонов допусков создается ошибка, определяемая перед деактивизацией или разъединением.
После обработки данных в блоке 12 определяются корреляции интервалов возбуждения клапанов с сигналами воспроизведения 14 стратегии управления и соответственно с фазами управления, которые осуществляются в блоке 12. На этом этапе достаточно, чтобы сравниваемые данные находились внутри конкретных диапазонов допусков. Если данное условие не выполняется, то снова инициализируется деактивизация 24 или разъединение 25 с помощью ступени 27 принятия решения.
Генерирование тестовых сигналов или тестовых импульсов посредством схемы 18, оценка обратной связи этих тестовых импульсов, символизируемой функциональными блоками 28 и 29, реакция на ошибочную обратную связь, которая через точки 30 и 31 ответвления ведет к деактивизации или разъединению управления, а также, в итоге, применение критериев правдоподобности с помощью схем 16 и 17 в соответствии с фиг.2, аналогичным образом иллюстрируются на блок-схеме алгоритма в соответствии с фиг.3. При невыполнении критерием правдоподобности происходит деактивизация или разъединение управления по точкам 32, 33 разветвления сигналов.
Процесс исполнения программы является циклическим. После завершения иллюстрируемых функций программа возобновляется. Только наиболее важные функции проиллюстрированы на блок-схеме алгоритма в соответствии с фиг.3. Дополнительные функции добавляются в зависимости от конкретного типа применения.
Использование: в тормозных системах с антиблокировочным управлением. Сущность изобретения: тормозная система с антиблокировочным управлением и/или управлением проскальзыванием при тяговом усилии, по существу, состоит из схем 1 для формирования сигналов датчиков колес, схем 2 контроллера для анализа и обработки сформированных сигналов датчиков и для генерирования управляющих сигналов тормозного давления, из схем 3 мониторинга, которые обрабатывают управляющие сигналы независимо от схем 2 контроллера, а также из схем для обмена и сравнения сигналов схем 2 контроллера с соответствующими сигналами схем 3 мониторинга. Схемы 3 мониторинга имеют более простую структуру, чем схемы 2 контроллера. Принципы управления воспроизводятся в схемах 3 мониторинга. В частности, фазы управления определяются схемами 14 воспроизведения на основе одних и тех же управляющих критериев и управляющих параметров, которые используют управляющие схемы 2. Сигналы схем 14 воспроизведения объединены с сигналами 13 возбуждения клапанов в. схемах 15 корреляции для определения ошибок. 6 з.п.ф-лы, 3 ил.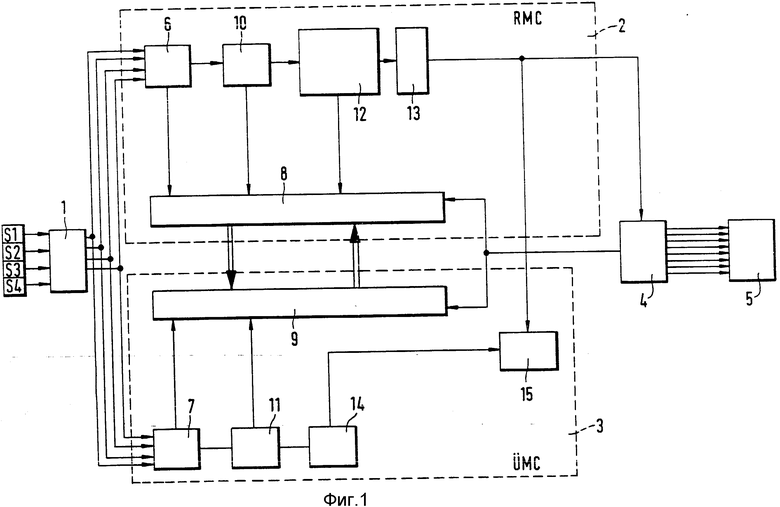
 мониторинга, и тем, что микроконтроллер
мониторинга, и тем, что микроконтроллер  мониторинга имеет упрощенную структуру по сравнению с управляющим микроконтроллером (RМС).
мониторинга имеет упрощенную структуру по сравнению с управляющим микроконтроллером (RМС). мониторинга.
мониторинга. мониторинга и схемы (15) корреляции сигналов возбуждения клапанов с сигналами схем (14) воспроизведения являются интегральными компонентами управляющего микроконтроллера (RМС) и микроконтроллера
мониторинга и схемы (15) корреляции сигналов возбуждения клапанов с сигналами схем (14) воспроизведения являются интегральными компонентами управляющего микроконтроллера (RМС) и микроконтроллера  мониторинга.
мониторинга. мониторинга содержат дополнительные схемы (16,17) для контроля и сравнения сигналов скорости, выведенных сигналов, фаз управления, интервалов возбуждения клапанов, согласно критериям правдоподобности.
мониторинга содержат дополнительные схемы (16,17) для контроля и сравнения сигналов скорости, выведенных сигналов, фаз управления, интервалов возбуждения клапанов, согласно критериям правдоподобности.
| DE, заявка, 3234637, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |

