Изобретение относится к способу получения инерционного движения и устройству для получения силы, вызывающей движение, предназначено для получения поступательного движения в транспортных средствах и может быть применено в различных средствах передвижения.
Известен способ получения инерционного движения, реализованный в устройстве, в котором сила инерции создается за счет двух одинаковых эксцентриков, которые вращаются в разные стороны синхронно и синфазно (авт. св. СССР N 15124, МКИ B 63 D 57/00, опубл. в Б. И. N 20 за 1962 г.).
Недостаток известного способа заключается в том, что на корпус транспортного средства передается вибрация от возбудителя колебаний.
Известен также способ получения инерционного движения реализованный в устройстве, заключающийся в том, что вибрационная сила создается дебаласным вибратором, содержащим два эксцентрика, синхронно и синфазно вращающихся в противоположные стороны с последующей передачей вибрационной силы на механизм передвижения с помощью механической передачи (авт. св. СССР N 939817, МКИ F 03 G 3/00, опубл. 30.06.82. в Б. И. N 24).
Недостатками известного способа и устройства, выполненных согласно ему, являются повышенная вибрация, передаваемая на транспортное средство, сложность механической передачи, низкий КПД и надежность. Кроме того, известные способы не позволяют получать высокие скорости движения и регулировать скорость перемещения в широком диапазоне.
Известен способ для получения силы, вызывающей движение транспортного средства, реализованный в устройстве и принятый в качестве прототипа, содержащий 2 дебалансных вибратора, установленных на общей жесткой оси параллельно продольной оси транспортного средства (заявка Франции N 2630784, F 03 G 3/00, с приоритетом от 1989 г.).
В этом способе более совершенный механизм передачи воздействующей силы на опору.
Однако ему присущи те же недостатки, что и в описанных ранее.
Заявляемое изобретение направлено на повышение КПД, надежности, увеличение регулировочных свойств в широком диапазоне скоростей, упрощение кинематической передачи и снижение вибрации.
Для достижения указанного результата в известном способе получения инерционного движения, заключающегося в том, что сила создается с помощью дебалансных вибраторов, содержащих два эксцентрика, вращающихся в разные стороны синхронно и синфазно, согласно изобретению создается постоянно направленная вдоль оси транспортного средства сила инерции за счет установки дебалансных вибраторов с двумя эксцентриками, вращающимися в разные стороны синхронно и синфазно, установленных на оси на расстоянии L друг от друга, причем угол сдвига фаз мгновенных сил, создаваемых дебалансными вибраторами, равен
ϕi= -πL(i-1)/τ,
где L = τ k/n;
τ = V/2f - полюсное деление;
f = ω/2π - частота колебаний вибрационных сил;
i - порядковый номер небалансного вибратора;
n - число пар вибраторов;
V - заданная скорость движения инерционной волны;
ω - угловая частота вращения вибраторов;
k - целое число, четное для нечетных "n" и нечетное для четных "n".
В варианте технического решения направление сил обращается в обратную сторону за счет изменения угла сдвига фаз мгновенных сил, создаваемых вибраторами.
В варианте способа расстояние между вибраторами изменяется.
В известном устройстве для получения инерционного движения, содержащем дебалансный вибратор, состоящий из двух эксцентриков, вращающихся синхронно и синфазно в разные стороны, согласно изобретению эксцентрики установлены на поворотных рычагах и выполнены подвижными относительно рычагов, концы которых имеют упоры, а между упорами и эксцентриками установлены пружины.
В варианте устройства устанавливается последовательно несколько вибраторов, плоскости вращения эксцентриков в которых расположены под углом друг к другу.
Процесс получения постоянной силы, направленной вдоль общей оси, путем расположения нескольких дебалансных вибраторов с парами эксцентриков, вращающихся синхронно и синфазно и расположенных на определенном расстоянии друг от друга вдоль оси со смещением фазы возмущающей синусоидальной волны, определяемой расстоянием между вибраторами между вибраторами, позволяет создать однонаправленную и постоянную во времени силу. При этом снижается вибрация на механизм передвижения, повышается КПД, устраняется необходимость кинематической передачи на опорную часть транспортного средства, что повышает надежность системы и улучшает регулировочные свойства.
Кроме того, поскольку в предлагаемом способе вибрация практически отсутствует, способ может быть применен на различных транспортных средствах с электрическим или тепловым первичным двигателем.
Дополнительное введение в способ изменения направления движения и обеспечение режима выбега без остановки вибраторов повышает универсальность системы и КПД.
Изменение расстояния между вибраторами повышает регулировочные свойства системы.
Подвижное размещение эксцентриков на рычагах и установка пружин между упорами и эксцентриками в устройство для получения движущейся волны сил, воздействующих на опору, позволяет повысить плавность пуска системы.
Расположение плоскостей вращения соседних вибраторов под некоторым углом позволяет изготовлять компактные устройства для получения движущей силы.
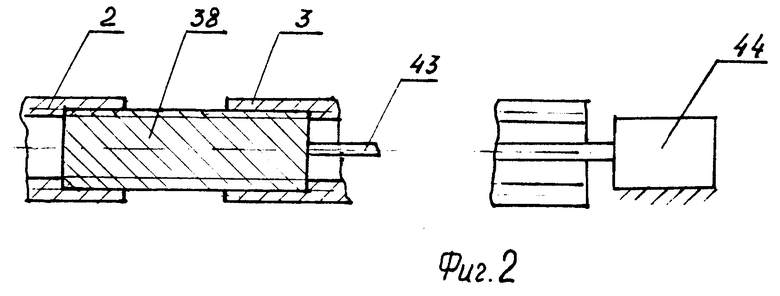
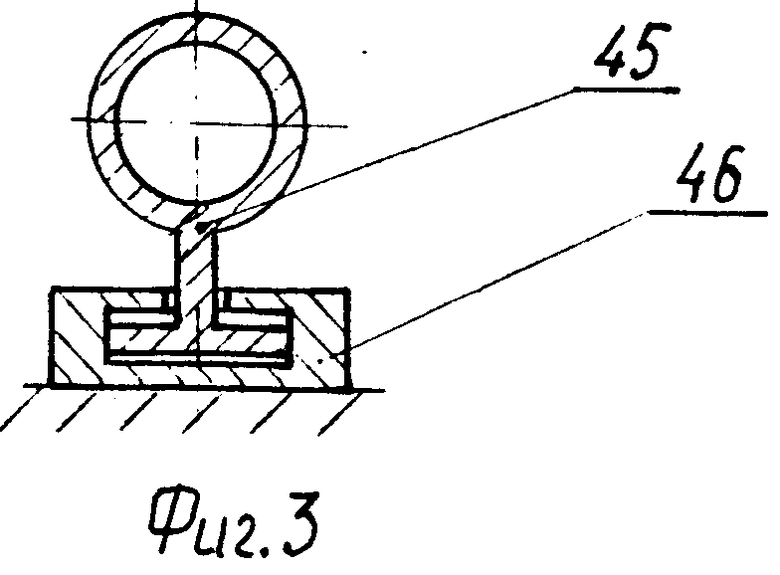
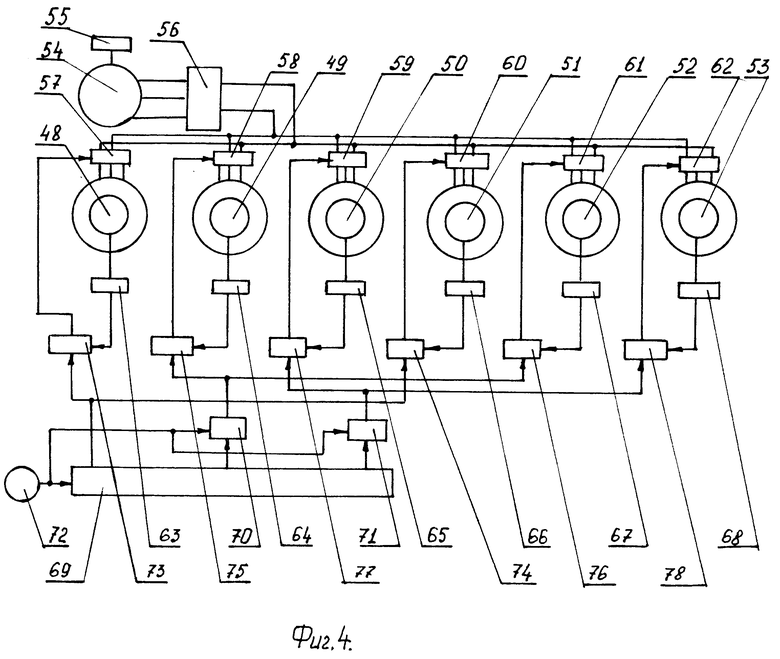
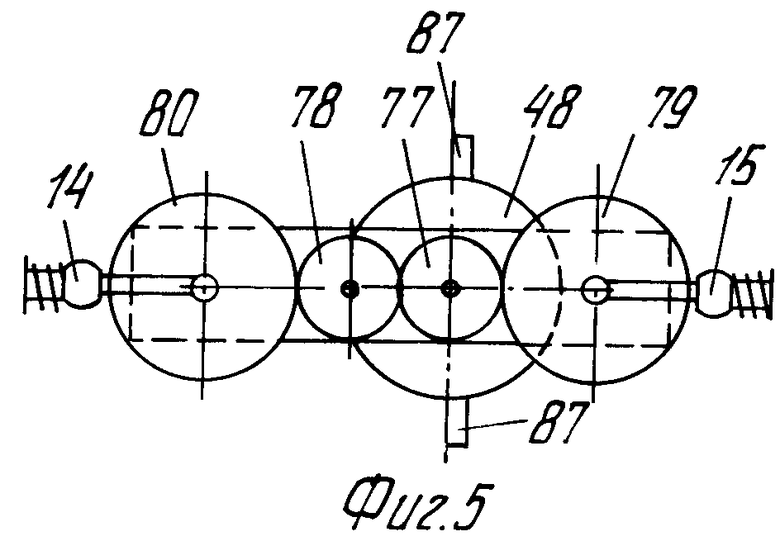
На фиг. 1 представлена конструкция устройства для получения инерционного движения; на фиг. 2, 3 показан элемент конструкции для изменения расстояния между вибраторами; на фиг. 4 дана принципиальная электрическая схема управления дебалансными вибраторами; на фиг. 5 и 6 показаны элементы сопряжения приводного электродвигателя с дебалансами; на фиг. 7 виден вариант устройства, в котором плоскости дебалансных вибраторов расположены под некоторым углом по отношению друг к другу; на фиг. 8 представлена диаграмма возмущающих сил, создаваемых вибраторами; на фиг. 9 показано направление сил, создаваемых вибраторами; на фиг. 10 имеется диаграмма движения силовой волны.
Устройство для получения силы, вызывающей движение по данному способу, состоит из общего трубчатого основания 1, жестко сочлененного в левой части с корпусом транспортного средства (на чертеже не обозначено) и разделенного на секции 2, 3, 4, 5, 6, 7. На равном расстоянии друг от друга, на секциях располагаются симметрично относительно центральной оси консоли 8, 9, 10, 11, 12, 13 сверху и снизу трубчатого основания 1. На обоих концах 8 - 13, с возможностью вращения, установлены эксцентрики соответственно 14 и 15 на консолях 8; 16, 17 на консолях 9; 18, 19 на консолях 10; 20, 21 на консолях 11; 22, 23 на консолях 12 и 24, 25 на консолях 13. Эксцентрики расположены на соответствующих поворотных рычагах 26, 27, 28, 20, 30, 31, 32, 33, 34, 35, 36 и 37. Причем сами эксцентрики попарно установлены зеркально противоположно относительно друг друга. Таким образом, на фиг. 1 представлено 6 дебалансных вибраторов. Первый вибратор расположен на секции 2 трубчатого основания 1 с эксцентриками 14 и 15, второй расположен на секции 3 с экцентриками 16 и 17, третий вибратор с эксцентриками 18 и 19 расположен на секции 4, четвертый вибратор с эксцентриками 20 и 21 на секции 5, пятый вибратор с эксцентриками 22 и 23 на секции 6 и шестой вибратор с эксцентриками 24 и 25 на секции 7.
Расстояние между вибраторами (осями, проходящими через центры консолей 8 - 13 равно L = kτ/n (1), где n - число пар вибраторов; k - целое число, четное для нечетных "n" и нечетное для четных "n"; τ = V/2f - полюсное деление; f = ω/2π - частота колебаний вибрационной силы; ω - угловая частота вращения эксцентриков; V - заданная скорость движения инерционной силы.
Углы между осями, проходящими через консоли и осями, проходящими через рычаги и центр тяжести эксцентриков, распределяются следующим образом. Если для первого дебалансного вибратора, состоящего из консолей 8, рычагов 26, 27 и эксцентриков 14, 15, указанный угол принять равным 0, то для каждого последующего дебалансного вибратора угол определяется по формуле ϕi= -πL(i-1)/τ (2), отсчитываемый для верхних эксцентриков по часовой стрелке, а для нижних против часовой стрелки, где i - порядковый номер вибратора (считая по чертежу слева направо). При этом движение инерционной волны будет направлено в сторону последнего вибратора. В данном (фиг. 1) случае принимаем L = τ/3 , тогда ϕ2= -π/3 или -60o, ϕ3= -2π/3 или -120o, ϕ4= -π или -180o, ϕ5= -4π/3 или -240o и ϕ6= -5π/3 или -300o. Секции 2, 3, 4, 5, 6 и 7 соединены между собой с помощью резьбовых муфт 38, 39, 40, 41, 42, одна из которых 38 более детально представлена на фиг. 2. Секции 2 и 3 имеют соответственно левоходовую и правоходовую резьбы, а соединительная муфта 38 также имеет левоходовую и правоходовую резьбы, имеющие зацепление с соответствующими секциями (в данном случае 2 и 3). Все соединительные муфты объединены общим соединительным валом 43, проходящим внутри трубчатого основания 1. Вал 43 соединен с электродвигателем 44 (фиг. 2), жестко установленным на корпусе транспортного средства. Секции трубчатого основания 1 имеют Т-образные швеллеры 45, жестко соединенные с соответствующими секциями полкой вниз (фиг. 3) (на чертеже не обозначена). Швеллеры 45, с возможностью продольного перемещения, размещены в коробчатом основании 46. Последний жестко закреплен на корпусе транспортного средства. Первый, второй, третий, четвертый, пятый и шестой дебалансные вибраторы вращаются с помощью электродвигателей соответственно 48, 49, 50, 51, 52, 53 (фиг. 4), получающих питание от общего генератора 54, вращаемого первичным двигателем 55 и имеющего преобразователь 56. Каждый электродвигатель снабжен регулятором частоты вращения соответственно 57, 58, 59, 60, 61, 62 и импульсным датчиком скорости 63, 64, 65, 66, 67 и 68. Система управления содержит блок формирования импульсов (БФИ) 69 и устройства задержки импульсов (УЗИ) 70 и 71. БФИ 69 и УЗИ 70 и 71 получают сигналы от командоаппарата 72, а УЗИ 70 и 71 получают также сигналы от БФИ 69. Сигналы от БФИ 69 напрямую поступают в блоки сравнения 73 и 74. К блоку сравнения 73 приходит сигнал от датчика скорости 63, а выход блока сравнения 73 соединен с регулятором частоты вращения 57. В свою очередь блок сравнения 74 получает сигналы от датчика скорости 66, а его выход соединен с блоком управления 60. На блоки сравнения 75 и 76 сигнал поступает от УЗИ 70. Блок сравнения 75 получает сигналы от датчика скорости 64, а его выход соединен с регулятором 58. Блок сравнения 76 связан с датчиком 66, а его выход соединен с блоком 60. На блоки сравнения 77 и 78 сигналы поступают от УЗИ 71. Блок сравнения 77 получает также импульсы от датчика скорости 65, а его выход соединен с блоком управления 59. Блок сравнения 78 получает сигналы от датчика скорости 68, а его выход связан с блоком управления 62.
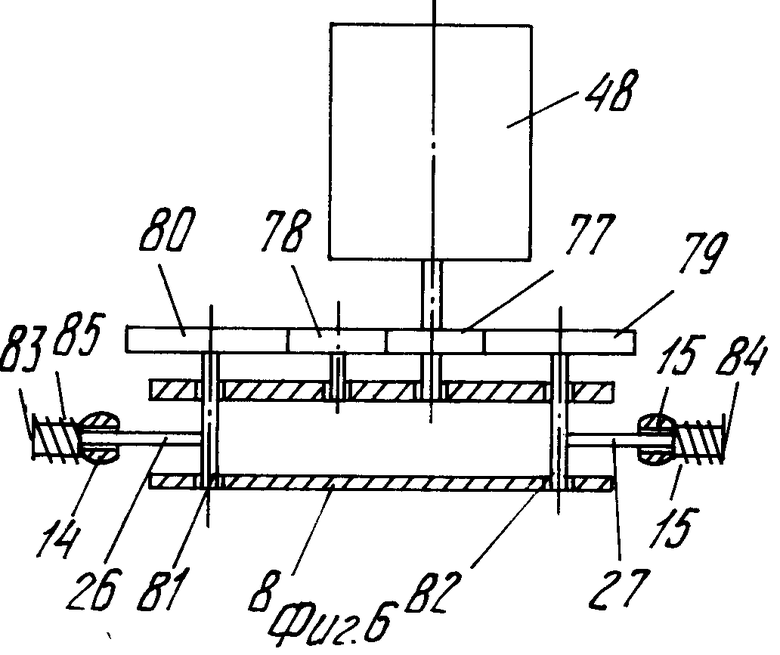
Каждый из дебалансных вибраторов механически сочленен со своим двигателе так, как это показано на фиг. 5 и 6 на примере первого дебалансного вибратора. Электродвигатель 48 имеет шестерню 77, насажанную на его вал. Шестерня 77, в свою очередь, с одной стороны имеет зацепление с точно такой же шестерней 78 и зубчатым колесом 79, а шестерня 78 имеет зацепление с зубчатым колесом 80. Колеса 79 и 80 выполнены одинаковыми и снабжены осями 81 и 82, вращающимися в подшипниках (на чертеже не обозначены), закрепленных в консолях 8. На оси 81 и 82 зеркально противоположно жестко насажены рычаги 26 и 27 с эксцентриками 14 и 15.
В варианте конструкции эксцентрики могут быть насажены на рычаги подвижно с возможностью перемещения вдоль рычагов. В этом случае рычаги имеют ограничители 83 и 84, а между эксцентриками и ограничителями установлены пружины сжатия 85 и 86. Электродвигатель 48 жестко крепится к консолям 8 с помощью кронштейнов 87.
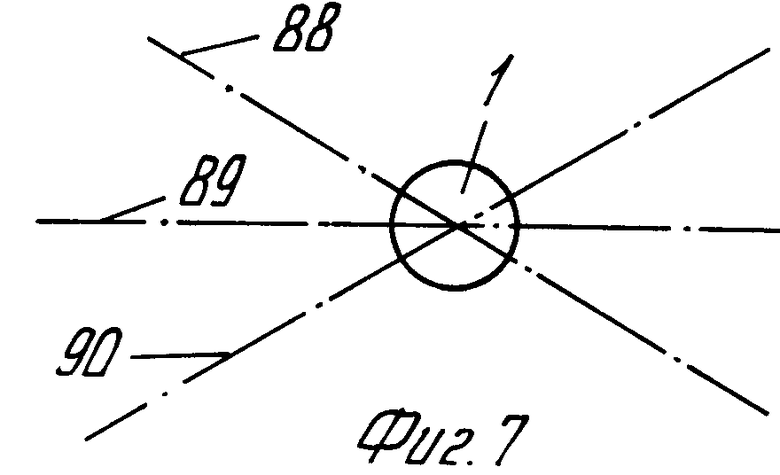
В варианте технического решения плоскости вращения дебалансных вибраторов могут быть смещены относительно друг друга на некоторый угол, как это показано на фиг. 7, где 88 - это проекция плоскости вращения эксцентриков 14 и 15 первого вибратора, 89 - проекция плоскости вращения эксцентриков 16, 17 второго вибратора, 90 - проекция плоскости вращения эксцентриков 18 и 19 третьего вибратора. Плоскости вращения следующих вибраторов совпадают с указанными на фиг. 7 в следующем порядке: проекция плоскости вращения четвертого вибратора совпадает с осью 88, проекция плоскости вращения пятого вибратора совпадает с осью 89, а проекция плоскости вращения шестого вибратора совпадает с осью 90.
Плоскость вращения первого вибратора параллельна поверхности, на которой располагается транспортное средство. Угол смещения плоскостей определяется из расчета устранения соударений эксцентриков и так, чтобы гироскопический эффект не препятствовал маневрам транспортного средства.
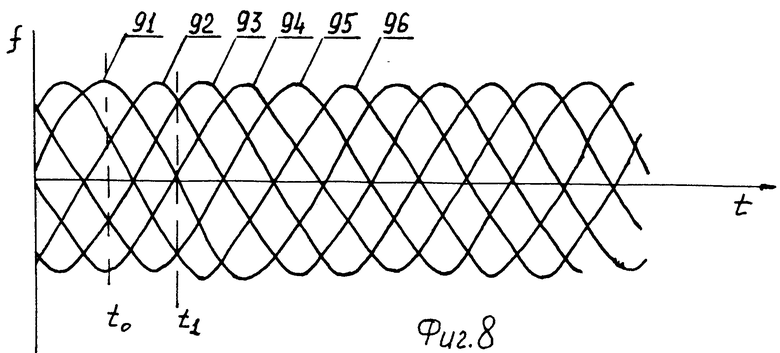
На графике (фиг. 8) цифрой 91 обозначен характер изменения возмущающей силы, создаваемой первым дебалансным вибратором; 92 - характер сил для второго вибратора; 93 - для третьего вибратора; 94 - для четвертого вибратора; 95 - для пятого и 96 - для шестого. На графике выделены два момента времени вертикальными пунктирными линиями и обозначены t0 и t1. Мгновенное значение сил, представленное на фиг. 8 для момента времени t0, обозначено буквой "a", а для момента времени t1 буквой "b". При этом мгновенные значения сил имеют то же обозначение, что и на фиг. 9, но с добавлением штриха для времени t0 и двух штрихов для времени t1.
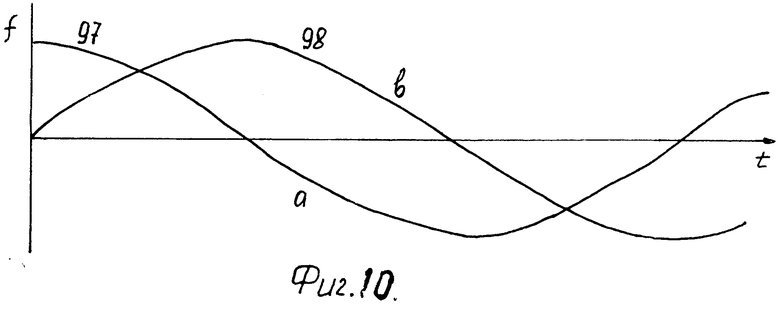
На фиг. 10 результирующая волна сил инерции для времени t0 обозначена цифрой 97, а другая для момента времени t1 обозначена цифрой 98.
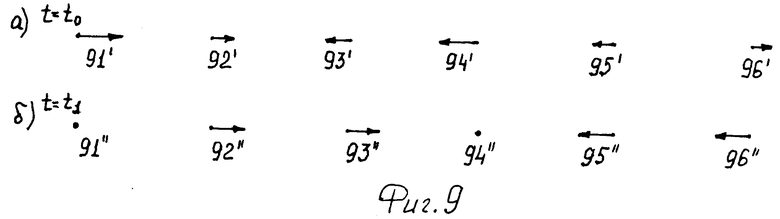
Устройство для получения силы, вызывающей движение, действует следующим образом. С помощью электродвигателей 48, 49, 50, 51, 52, 53 (фиг. 3, 4, 5, 6) эксцентрики 14, 15 первого дебалансного вибратора; 16, 17 второго дебалансного вибратора; 18, 19 третьего дебалансного вибратора; 20, 21 четвертого дебалансного вибратора; 22, 23 пятого дебалансного вибратора и 24, 25 шестого дебалансного вибратора приводятся во вращение с одинаковой скоростью и против часовой стрелки (фиг. 1). Поскольку эксцентрики вибраторов смещены по отношению друг к другу на определенный, указанный ранее угол, то в результате вдоль общего трубчатого основания 1 возникают знакопеременные синусоидальные возмущающие силы, характер которых представлен на фиг. 8. Рассмотрим момент времени t0. На ось 1 будут действовать мгновенные силы, величина которых отражена на фиг. 9,a. Так от первого вибратора и четвертого вибраторов силы 91' и 94' равны амплитудному значению и направлены встречно. Силы 92' и 95' от второго и пятого вибраторов также направлены встречно, а их величины равны 1/2 амплитуды. Силы 93' и 96' от третьего и шестого вибраторов также имеют величины, равные половине амплитудной, и направлены встречно. Эту диаграмму сил можно отобразить в виде волны 97, распределенной вдоль общей оси 1 (фиг. 10).
В момент времени t1 согласно графику (фиг. 8) на ось 1 силы 91'' и 94'' (фиг. 9) от первого и четвертого вибраторов равны нулю, а силы 92'', 93'', 95'' и 96'' от второго, третьего, пятого и шестого вибраторов будут примерно равны 0,866 и попарно направлены навстречу друг другу. Волна распределения сил будет соответствовать графику 98 (фиг. 10). Из сопоставления 97 и 98 видно, что за время от t0 до t1 волна сил сместилась влево от первого вибратора. Физически это можно представить в виде волн сжатия и растяжения, движущихся вдоль оси 1. Если последовательно рассматривать диаграмму сил фиг. 8, 9, от t0 до бесконечности, то можно заметить, что под действием сил вдоль оси будет иметь место перемещение волны инерции. Скорость перемещения волны определяется из формулы v = 2fτ .
Для примера, представленного на фиг. 1, полюсное деление τ равно расстоянию между двумя соседними точками, проходящими через 0, и равно 3L.
Для того, чтобы волна действующей силы, движущаяся вдоль оси, имела постоянную амплитуду и перемещалась с постоянной скоростью, что является условием для устранения паразитных вибраций, необходимо выполнение следующих условий: 1) пары вибраторов должны создавать встречные и равные мгновенные силы вдоль оси 1; 2) расстояние между вибраторами должно быть равным L = kτ/n ; 3) угол сдвига фазы создаваемых вибраторами сил должен быть равен ϕi= -πL(i-1)/τ; 4) число вибраторов должно быть четным; 5) минимальное число пар вибраторов должно равняться двум.
Возмущающая сила, генерируемая одним вибратором, будет равна Fi = Fmsin (ωt-ϕi) (3), где Fm = 2mRω2, m - масса одного эксцентрика, приведенная к радиусу вращения R, t - время. Результирующая поступательная сила инерционной волны будет равна Fe = nFm.
Для изменения максимальной скорости движения инерционной волны, в соответствии с уравнением V = 2f τ необходимо изменять полюсное деление и расстояние между вибраторами, что и реализовано на фиг. 4. При вращении электродвигателя 44 соединительные муфты 38, 39, 40, 41 и 42 стягивают или раздвигают секции 2, 3, 4, 5, 6 и 7 трубчатого основания 1, изменяя одновременно и полюсное деление и расстояние L между дебалансными вибраторами. Швеллеры 45, смещаясь относительно 46 поступательно, препятствуют повороту секций 2 - 7. Изменения угла сдвига фаз эксцентриков при этом не требуется.
Безвибрационная работа системы возможна при точной фазировке эксцентриков, что достигается представленной на фиг. 4 системой питания и управления электродвигателями вибраторов. Командоаппарат 73 имеет три режимных позиции: "движение вперед", "выбег" и "торможение". На каждой из режимных позиций задается определенная и регулируемая оператором частота сигналов для БФИ 69. В режиме "движение вперед" импульсы беспрепятственно проходят в блоки сравнения 73 - 78, где происходит сравнение с частотой импульсов, поступающих от соответствующих датчиков скорости 63 - 68. Если имеет место несоответствие количества импульсов, то от блоков сравнения подается команда на соответствующий блок управления 57 - 62 для снятия рассогласования. Так, если число импульсов датчика скорости превышает число импульсов от БФИ, то идет команда на снижение скорости вращения соответствующего двигателя и наоборот, до тех пор, пока эта разность не станет равной 0.
Для обеспечения выбега системы необходимо, не останавливая инерционные вибраторы, остановить движение инерционной силы. Для этого требуется, чтобы угол сдвига фаз третьего и пятого вибраторов стал равным 0o по отношению к первому, а угол сдвига фаз второго и шестого вибраторов был таким же, как и у четвертого. Это достигается тем, что при установке командоаппарата 73 в положение "выбег" в УЗИ 70 и 71 поступают команды о том, что должно быть снято число импульсов от БФИ 69 такое, чтобы произошло отставание поворота эксцентриков 16, 17 и 22, 23 на угол 120o, а для эксцентриков 18, 19 и 24, 25 на угол 240o. Так, если число импульсов датчика скорости равно 720 имп. /оборот, то в УЗИ 70 произойдет снятие 240 импульсов, а в УЗИ 71 будет снято 480 импульсов. При выполнении этого сигнала эксцентрики встанут так, что все три пары вибраторов - первый и четвертый, второй и пятый, третий и шестой - будут генерировать встречные силы инерции без сдвига фаз, результирующая сила будет равна 0 и поступательное движение инерционной волны прекратится.
Для получения тормозного эффекта необходимо создать такой сдвиг фаз между вибрационными силами, при котором результирующая сила будет двигаться в противоположную сторону. Установив командоаппарат 72 в положение "торможение", подают команду на УЗИ так, чтобы произошло снятие части импульсов для второго и пятого вибраторов, и они должны отстать в состоянии "выбег" на угол 120o (240 имп.), а для эксцентриков 18, 19 и 24, 25 - на угол 120o (240 имп.) по сравнению с положением "выбег". При этом произойдет изменение чередования фаз в сравнении с положение "движение вперед". Третий и шестой вибраторы будут создавать силу со сдвигом на -240o по отношению соответственно к первому и четвертому вибраторам, а вибраторы пятый и второй - со сдвигом на -120o. Движение силы инерции будет направлено в сторону, обратную прямому движению. При очередной установке командоаппарата 72 в положение "движение вперед" произойдет очередная задержка импульсов в УЗИ 70 и 71 так, что эксцентрики 18, 19 и 24, 25 отстанут сначала на угол -120o, эксцентрики 16, 17 и 22, 23 на угол -240o, что будет соответствовать режиму "выбег", а затем произойдет переход на движение "вперед" при дополнительном отставании угла рассогласования для эксцентриков 18, 19 и 24, 25 на угол -120o, а для эксцентриков 16, 17 и 22, 23 на угол -240o. Как видно из описания, переход на режим от прямой волны движения инерционной силы на обратный и наоборот происходит через режим "выбег", чем достигается плавность перехода. Меняя скорость вращения электродвигателей 48 - 53, можно обеспечить плавный пуск и торможение.
В варианте технического решения эксцентрики 14 - 25 имеют подвижное сочленение с рычагами соответственно 25 - 37 (фиг. 5 и 6). В спокойном состоянии пружины 85, 86 сдвигают эксцентрики в сторону центра вращения. Во время вращения эксцентрики, за счет действия центробежных сил, двигаются в сторону упоров 83, 84. В зависимости от частоты вращения меняется и положение эксцентриков относительно центра вращения. Поскольку вибрационная сила зависит от соотношения Fm = 2mR ω2 , то изменение радиуса, в дополнение к скорости вращения, обеспечивает большую плавность, особенно при пуске системы в ход. Подбирая характеристику пружин 85, 86, можно обеспечить любой требуемый характер нарастания силы Fm в режиме пуска.
Пример применения. Для транспортного средства требуется получить максимальную скорость движения 50 км/ч. (14 м/с) при усилии 1000 кг (9800 H). Для упрощения конструкции принимаем устройство для получения инерционной волны с числом пар вибраторов n = 2. Скорость вращения эксцентриков 3000 об/мин (ω = 2πf = 314), масса эксцентриков принимается равной 0,2 кг. Амплитуда силы, создаваемой одним вибратором Fm = Fe/n = 490 H. Радиус эксцентриков определяем по формуле (3) R = Fm/2m ω2 = 490/2•314•0,2 = 0,124 м. Частота колебаний вибратора f = 314/2 π = 50 Гц. Полюсное деление (из формулы V = 2f τ , τ = 14/2•50 = 0,14 м. Расстояние между вибраторами при k = 1, L = 0,14/2 = 0,07 м. Во избежание соударения эксцентриков принимаем k = 5, тогда L = 0,35 м. Общая длина устройства для получения инерционной волны 0,35•3 = 1,03 м. Угол фазового отставания для вибраторов по формуле (2): ϕ2= 5π/2 = -450o = -90o; ϕ3 = -900o = -180o; = ϕ4 - 1350o = -270o.
Технико-экономические достоинства способа для получения инерционного движения и устройства для получения силы, вызывающей движение, заключается в следующем.
1. Снижена вибрация, передаваемая на корпус транспортного средства.
2. Повышен КПД системы, так как паразитные вибрации сведены к минимуму встречным включением пар вибраторов.
3. Регулировочные свойства более высокие, поскольку изменение скорости достигается тремя способами: изменением скорости вращения вибраторов, изменением полюсного деления и изменением угла сдвига фаз вибрационных сил.
4. Более высокая надежность, поскольку трансмиссии могут быть исключены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАЗОВАНИЯ ДВИЖУЩЕЙ ВОЛНЫ ДЛЯ ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2397097C1 |
| Вибрационный конвейер | 1987 |
|
SU1502437A1 |
| СПОСОБ ОБРАЗОВАНИЯ ВОЛН ДВИЖУЩИХ СИЛ В КОЛЕСНОМ ТРАНСПОРТНОМ СРЕДСТВЕ И УНИВЕРСАЛЬНЫЙ КОЛЕСНЫЙ ВЕЗДЕХОД, ЕГО РЕАЛИЗУЮЩИЙ | 2010 |
|
RU2425774C1 |
| ПРЕДУПРЕЖДАЮЩИЙ СИГНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2177886C2 |
| ПРЯМОТОЧНЫЙ ДВИЖИТЕЛЬ ДЛЯ ВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2477699C1 |
| СПОСОБ ПЕРЕНОСА ТЕПЛОВОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2306497C1 |
| СИСТЕМА ЗАЖИГАНИЯ "УНИВЕРСАЛ МАДИ" | 1996 |
|
RU2109163C9 |
| СИГНАЛ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (СПОСОБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ) | 1999 |
|
RU2174472C2 |
| СПОСОБ ОБРАЗОВАНИЯ ТОЛКАЮЩЕЙ И ПОДЪЕМНОЙ СИЛЫ И ЛЕТАТЕЛЬНЫЙ АППАРАТ, РЕАЛИЗУЮЩИЙ ЭТОТ СПОСОБ | 2006 |
|
RU2344968C2 |
| Привод транспортного средства | 1985 |
|
SU1404383A1 |
Изобретение относится к инерционным движителям транспортных средств и направлено на повышение КПД, надежности, увеличение регулировочных свойств в широком диапазоне скоростей. Вдоль оси движения транспортного средства создается инерционная сила за счет установки 2п дебалансных вибраторов на общей жесткой оси на расстоянии L друг от друга и угол сдвига фаз мгновенных сил, создаваемых вибраторами, равен  , где τ = V/2f - полюсное деление;
, где τ = V/2f - полюсное деление;  - частота колебаний вибрационной силы; i - порядковый номер дебалансного вибратора; n - число пар вибраторов; V - заданная скорость движения инерционной силы; ω - угловая частота вращения вибраторов; k - целое число, четное для нечетных "n" и нечетное для четных "n". Для обеспечения выбега и торможения производится изменение угла сдвига фаз мгновенных сил, создаваемых вибраторами. Предусматривается изменение максимальной скорости движения инерционной силы за счет изменения расстояния между вибраторами. 2 с. и 3 з.п. ф-лы, 10 ил.
- частота колебаний вибрационной силы; i - порядковый номер дебалансного вибратора; n - число пар вибраторов; V - заданная скорость движения инерционной силы; ω - угловая частота вращения вибраторов; k - целое число, четное для нечетных "n" и нечетное для четных "n". Для обеспечения выбега и торможения производится изменение угла сдвига фаз мгновенных сил, создаваемых вибраторами. Предусматривается изменение максимальной скорости движения инерционной силы за счет изменения расстояния между вибраторами. 2 с. и 3 з.п. ф-лы, 10 ил.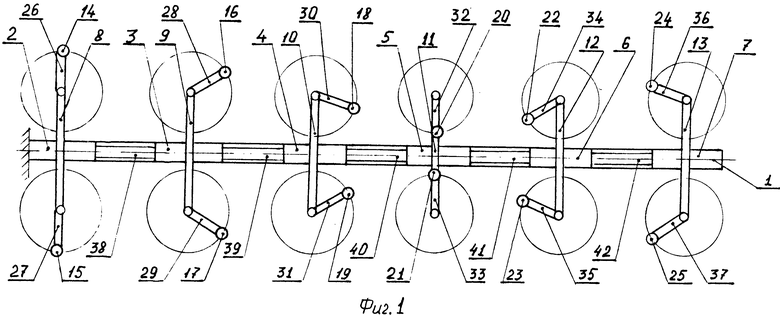
ϕi= -πL(i-1)/τ,
где = τk/n;
τ = V/2f - полюсное деление;
ω/2π - частота колебаний вибрационной силы;
i - порядковый номер дебалансного вибратора;
n - число пар вибраторов;
V - заданная скорость движения инерционной силы;
ω - угловая частота вращения вибраторов;
k - целое число, четное для нечетных n и нечетное для четных n.
| FR, заявка, 2630784, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
