Изобретение относится к авиации и может быть использовано в качестве летательного аппарата, в том числе в спортивных и развлекательных целях.
Известен летательный аппарат, в котором использованы две пары крыльев (см., например, патент РФ N2102287, МПК В64С 39/08 "Самолет", опубл. 20.01.98 г., Б.И. №2).
Наличие второй пары крыльев необходимо для повышения свойства планирования. В то же время известный летательный аппарат использует традиционный движитель для обеспечения движения. Недостатком таких движителей является низкий КПД, а сам аппарат имеет плохие маневренные качества.
Более близким по технической сущности и принятым за прототип является летательный аппарат, в котором для образования толкающей и подъемной силы, необходимой для полета, использованы маховые движения крыльев (См., например, патент РФ №2138424, МПК В64С 33/02 "Летательный аппарат", опубл. 27.09.1999, Б.И. №27).
Недостаток известного летательного аппарат состоит в том, что в нем использована только одна пара крыльев с ограниченной гибкостью, что снижает КПД аппарата. Маневренность машины также невысока.
Целью данного изобретения, являются: повышение КПД и маневренности летательного аппарата.
Для достижения указанного результата в известном способе, в котором образование толкающей и подъемной силы, необходимой для полета летательного аппарата, осуществляется за счет маховых движений крыльев, согласно изобретению указанную силу образуют за счет одновременного и синхронного махового движения каждой пары крыльев, расположенных симметрично по отношению к оси фюзеляжа, причем пары передних крыльев опережают по фазе на 90° маховые движения пары задних крыльев.
В варианте способа в процессе полета изменяют угол атаки каждого из крыльев в отдельности.
В устройстве летательного аппарата, содержащего фюзеляж, две пары крыльев, симметрично расположенных в одной плоскости с каждого борта, шарниры, установленные на фюзеляже и связывающие крылья с фюзеляжем, рабочий механизм для образования маховых движений крыльев, допускающий изменение угла атаки каждого крыла в отдельности, и силовую установку, согласно изобретению лопасти крыльев выполнены из гибкого пружинящего материала, рабочий механизм каждого борта состоит из коленвалов, сочлененных с силовой установкой, каждый коленвал содержит два колена, колена шарнирно через ползуны сочленены со штоками, колена передней пары крыльев сдвинуты на 90° по отношению к коленам задней пары крыльев по направлению вращения коленвалов, положения колен правой и левой стороны борта зеркально симметричны по отношению к вертикальной плоскости, делящей фюзеляж пополам, причем силовая установка выполнена с возможностью вращения коленвалов в разные стороны.
Процесс, в котором толкающую и подъемную силу, вызывающую полет, создают маховыми сдвинутыми по фазе на 90° движениями двух пар крыльев, расположенных в одной плоскости, позволяет повысить КПД летательного аппарата.
Изменение угла атаки каждого из крыльев в отдельности способствует обеспечению высокой маневренности при полете, а также позволяет зависать в воздухе и подниматься вертикально.
Применение в летательном аппарате пары крыльев с каждого борта, расположенных в одной плоскости, и в котором крылья состоят из лопастей, связанных с шарнирами посредством цилиндрических штоков, а пары крыльев каждой стороны фюзеляжа, снабженные отдельным рабочим механизмом, позволяют обеспечить большую стабильность при полете.
Наличие в летательном аппарате рабочих механизмов, состоящих из двух коленвалов, сочлененных с силовой установкой, где каждый коленвал содержит два колена, колена шарнирно через ползуны сочленены со штоками, колена первых пар крыльев сдвинуты на 90° по отношению к коленам первой пары крыльев по направлению вращения коленвалов, положения колен правого и левого бортов зеркально симметрично по отношению к вертикальной плоскости, делящей фюзеляж пополам, а силовая установка выполнена с возможностью вращения коленвалов в разные стороны синхронно и синфазно, дает возможность обеспечить высокую надежность системы создания толкающей и подъемной силы.
Заявленное изобретение иллюстрируется чертежами.
На фиг.1 представлена конструкция летательного аппарата в плане.
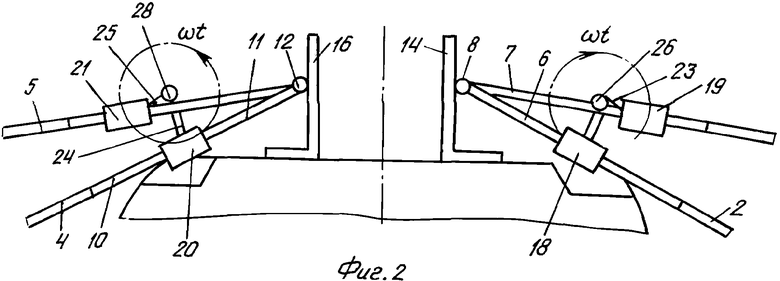
На фиг.2 дана конструкция аппарата при виде спереди.
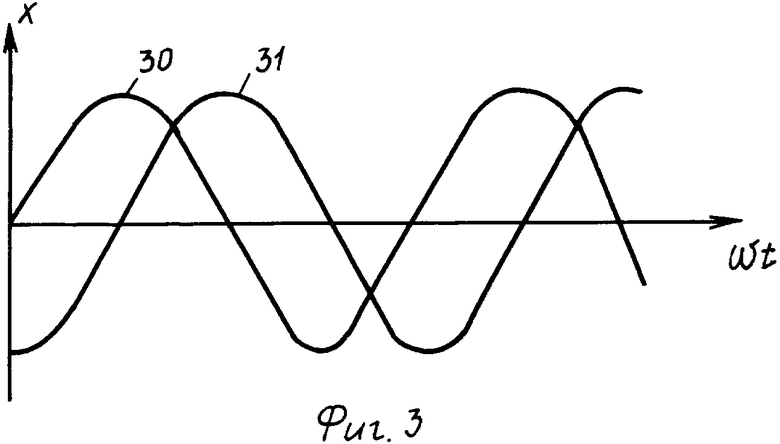
На фиг.3 имеется диаграмма движения крыльев в зависимости от времени.
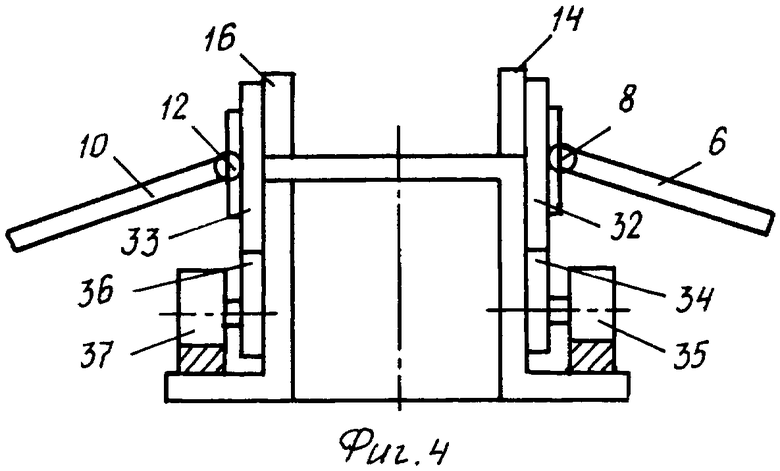
На фиг.4 видна принципиальная схема механизма для поворота крыла при изменении угла атаки.
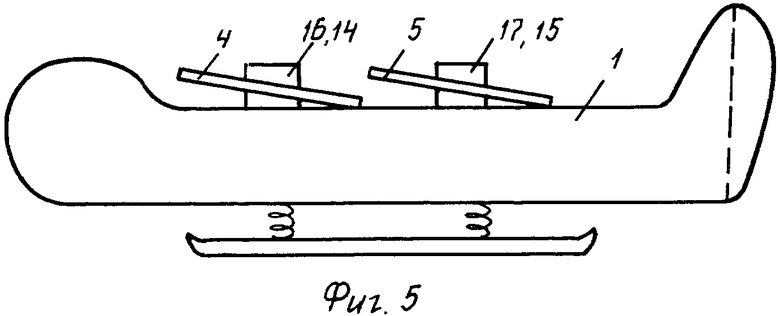
На фиг.5 показан летательный аппарат при виде сбоку.
Летательный аппарат - махолет устроен следующим образом. Фюзеляж 1 (фиг.1, 2) летательного аппарата содержит две пары крыльев с лопастями 2 и 3 с правой стороны (с правого борта) и 4 и 5 с левой стороны (с левого борта) от фюзеляжа. Лопасти выполнены из гибкого пружинящего материала, расположены поперек и симметрично по отношению к оси фюзеляжа 1 так, что центр тяжести аппарата находится между крыльями 2, 3, 4 и 5. Лопасти 2 и 3 крыльев правой стороны жестко сочленены с цилиндрическими штоками соответственно 6 и 7. Штоки 6 и 7, в свою очередь имеют шарниры соответственно 8 и 9. В свою очередь, лопасти 4 и 5 крыльев левой стороны жестко сочленены через штоки 10 и 11 с шарнирами соответственно 12 и 13. Шарниры 8-13 сочленены с корпусом фюзеляжа 1 аппарата симметрично по отношению к оси, проходящей через центр фюзеляжа. Шарниры 8-13 допускают движение штоков в плоскости, перпендикулярной центральной оси летательного аппарата и не допускают произвольный поворот штока вокруг его оси. Шарниры расположены на некоторой высоте по отношению к верхней поверхности корпуса аппарата и прикреплены к стойкам 14-17 в следующей последовательности: шарнир 8 сочленен со стойкой 14; шарнир 9 сочленен со стойкой 15, шарнир 12 сочленен со стойкой 16, а шарнир 13 сочленен со стойкой 17. Стойки 14-17, в свою очередь, жестко сочленены с верхней поверхностью корпуса 1 и располагаются симметрично с двух сторон относительно оси симметрии аппарата. Штоки снабжены ползунами: 18 для штока 6, 19 для штока 7, 20 для штока 10 и 21 для штока 11. Ползуны шарнирно сочленены с коленами 22-25 в следующем порядке: ползун 18 с коленом 22, ползун 19 с коленом 23, ползун 20 с коленом 24 и ползун 21 с коленом 25. Колена 22 и 23 жестко сочленены с валом 26, который приводится во вращательное состояние рабочим механизмом 27. В свою очередь колена 24 и 25 жестко сочленены с валом 28, который приводится во вращение рабочим механизмом 29. Таким образом, положения колен правого и левого борта зеркально симметрично по отношению к вертикальной плоскости, делящей фюзеляж пополам. Оба рабочих механизма сочленены с общей силовой установкой (на фиг. не показана). Вращение валов 22 и 24 должно быть синхронным, синфазным и взаимно противоположным. Это можно осуществить от одной силовой установки с помощью шестеренчатых передач. Для того чтобы штоки не задевали за корпус 1, в корпусе имеются ниши (на фиг. не обозначены). Колена 24 и 25 (левая пара крыльев) установлены так, что угол между ними при виде со стороны торца вала, идущего от привода 29, равен 90° (фиг.2). Иными словами, первое колено 24 переднего левого крыла сдвинуто по отношению ко второму 25, т.е. более дальнему по отношению к носовой части аппарата, на 90° с опережением по направлению вращения. Таким образом, лопасть 5 будет совершать маховые движения с отставанием на 90°. Аналогично выполнена система привода и для правой части и выглядит зеркально противоположно (угол между коленами 22 и 23 также составляет 90° и колено 22 вращается по отношению к колену 23 с опережением).
Высота положения "х" места сочленения штоков и лопастей в зависимости от времени "t" для штоков 6 и 7 обозначена цифрой 30 (фиг.З). Аналогичная диаграмма и для противоположной пары штоков 10 и 11 обозначена цифрой 31. В варианте технического решения шарниры 8, 9 и 12, 13 каждого крыла установлены на поворотных платформах. На фиг.4 показана платформа 32 для шарнира 8 и платформа 33 для шарнира 10. Каждая поворотная платформа сочленена шестеренчатой передачей с индивидуальным приводом. Так, для шарнира 8 эта шестеренчатая передача обозначена цифрой 34 и связана с индивидуальным приводом 35. А для шарнира 10 шестеренчатая передача 36 связана с индивидуальным приводом 37.
Аппарат выполнен по типу верхоплана, т.е. крылья с лопастями 2-5 расположены над фюзеляжем 1 (фиг.5). Плоскости лопастей имеют некоторый угол атаки. Аппарат снабжен хвостовым оперением с рулем поворота (на фиг. не обозначен).
Летательный аппарат - махолет действует следующим образом. Рабочий механизм 27 вращает вал 26 по часовой стрелке (фиг.2). Рабочий механизм 29 вращает вал 28 против часовой стрелки (если смотреть со стороны хвоста). При синхронном, синфазном и взаимно противоположном вращении валов 26 и 28 колена 22, 23, 24 и 25 придут во вращение и через ползуны 18-21 заставят штоки 6, 7, 10, 11 и, следовательно, лопасти 2-5 совершать возвратно-поступательные маховые движения. Маховые движения первых пар лопастей 2 и 4 передних крыльев будут опережать по фазе на 90° маховые движения вторых пар лопастей 3 и 5 задних крыльев. Лопасти крыльев расположены в одной плоскости и сдвинуты в пространстве. В то же время их маховые движения сдвинуты по фазе на 90°. Как известно, для получения поступательного движения необходим сдвиг движущих сил в пространстве и во времени, что и реализовано в данном изобретении. Таким образом, аппарат будет совершать поступательное движение, скорость V (м/с) которого определяется по формуле V=2fτ, где f - частота колебаний крыльев (Гц), τ - полюсное деление и в данном случае оно равно двойному расстоянию между центрами штоков (м). Синхронно и синфазно изменяя скорость вращения n валов 26 и 28, с помощью рабочих механизмов 27 и 29 можно регулировать скорость полета аппарата в соответствии с соотношением V=n τ/30 (f=n/60), где n - обороты/мин. В устройстве аппарата предусмотрена возможность изменения угла атаки каждого из крыльев в отдельности. При вращении поворотной платформы, например, 32 (фиг.4) с помощью индивидуального привода 35 происходит поворот оси шарнира 8 и, следовательно, штока 6 вокруг его центральной оси. Соответственно изменяется и сочлененной с ним угол атаки лопасти крыла 2. Таким образом, обеспечивается широкая возможность маневра при образовании подъемной и толкающей силы аппарата. В зависимости от положения плоскости крыльев можно совершать поворот аппарата в ту или иную сторону относительно линии полета, зависать, подниматься вверх или опускаться. Если изменить направление вращение валов 26 и 28, то аппарат может лететь и в обратном направлении. Таким образом, предлагаемый летательный аппарат по своим функциональным возможностям аналогичен вертолету. Однако, в отличие от него, аппарат - махолет допускает планирование на всех стадиях полета, что повышает его надежность. Наличие хвостового оперения с рулем поворота (фиг.5) позволяет совершать маневр в случае выхода из строя силовой установки. Механизм колебательного движения крыльев может быть выполнен, например, на основе гидравлических устройств. В качестве силовой установки может быть использован, например, ручной или ножной привод или ДВС.
Достоинствами предложенного технического решения являются высокий КПД, широкая маневренность и высокая надежность, подтверждаемая природой.
Похожий принцип заложен в летательном аппарате насекомого - стрекозы, а его высокая эффективность, маневренность и надежность проверена миллионами лет эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| Способ создания подъемной силы летательного аппарата | 2024 |
|
RU2831867C1 |
| МАХОЛЕТ | 1991 |
|
RU2007338C1 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| Махолет | 2017 |
|
RU2655582C1 |
| МАХОЛЕТ | 2006 |
|
RU2323129C2 |
| МУСКУЛЬНЫЙ ПЛАВАЮЩИЙ МАХОЛЕТ "ЛЕБЕДУШКА" | 2004 |
|
RU2304546C2 |
Изобретение относится к области авиации. Толкающую и подъемную силу создают маховыми сдвинутыми по фазе на 90° движениями двух пар крыльев, расположенных в одной плоскости. В процессе полета изменяют угол атаки каждого из крыльев в отдельности. Летательный аппарат содержит фюзеляж, две пары крыльев, шарниры, установленные на фюзеляже, и двигатель. Механизм для обеспечения маховых движений состоит из штоков, соединяющих лопасти крыльев с шарнирами. Штоки сочленены с двигателем с помощью ползунов и коленчатых валов с двумя коленами, сдвинутыми по отношению друг к другу на 90° для правых и левых крыльев. Рабочие механизмы левых и правых крыльев выполнены вращающимися в разные стороны синхронно и синфазно. Изобретение направлено на повышение КПД и маневренности. 2 н. и 1 з.п. ф-лы, 5 ил.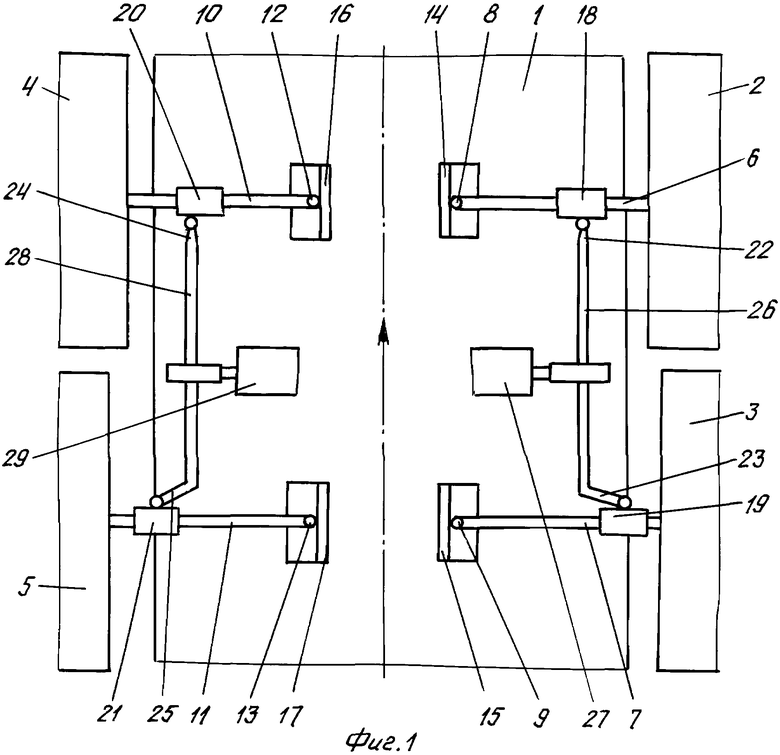
| US 4712749 А, 15.12.1987 | |||
| US 20040195436 A1, 07.10.2004 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1997 |
|
RU2138424C1 |
| САМОЛЕТ | 1996 |
|
RU2102287C1 |

